Rust 异步编程深度解析:从 Future 到运行时
本文深入解析Rust异步编程的底层机制,从Future trait的设计实现到运行时的工作流程。Rust通过惰性执行的Future状态机、Pin机制解决自引用问题,实现了零成本抽象的并发处理。文章详细剖析了async/await语法糖背后的编译器转换、Waker调度机制,以及Tokio运行时的任务调度和I/O反应器实现。同时提供了性能优化实践和常见陷阱规避策略,帮助开发者充分利用Rust异步编程的
引言
Rust 的异步编程模型在系统编程语言中独树一帜。它通过零成本抽象实现了高性能的并发处理,同时保持了内存安全。本文将深入探讨 Rust 异步编程的底层机制,从 Future trait 的设计哲学到运行时的实现细节,帮助你构建对异步 Rust 的完整理解。
1. Future trait:理解异步的核心抽象
1.1 Future 的本质
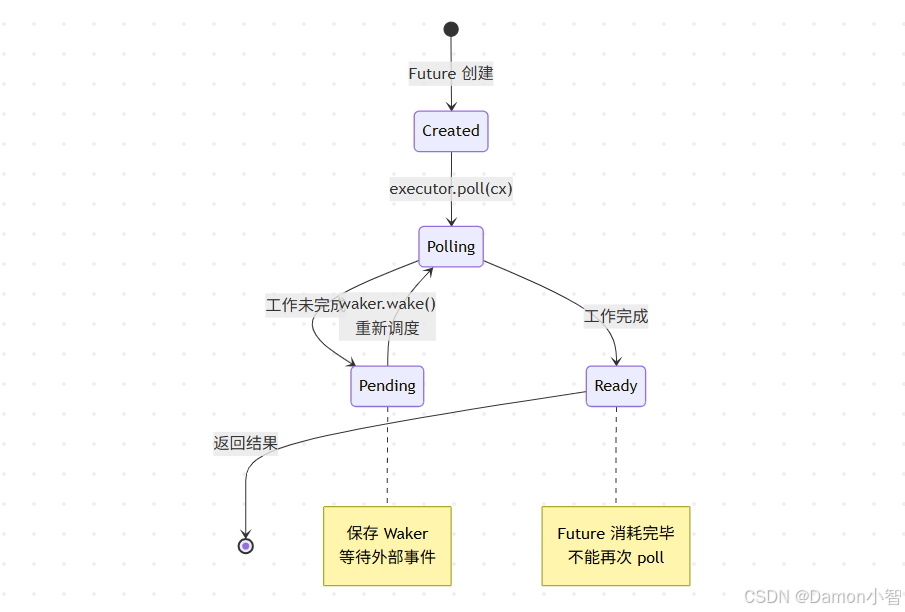
在 Rust 中,Future 并非传统意义上的 Promise。它是一个惰性的、可轮询的状态机:
pub trait Future {
type Output;
fn poll(self: Pin<&mut Self>, cx: &mut Context<'_>) -> Poll<Self::Output>;
}
pub enum Poll<T> {
Ready(T),
Pending,
}这个设计有几个关键洞察:
1. 惰性执行:Future 在被 poll 之前不会执行任何工作
2. 零分配:不需要在堆上分配闭包或回调
3. 组合性:Future 可以通过组合器链式组合,编译器会将其优化为单一状态机
1.2 Pin 与自引用结构
Pin 是理解异步 Rust 的关键。考虑这个 async 函数:
async fn read_to_string(socket: &TcpStream) -> String {
let mut buffer = String::new();
socket.read_to_string(&mut buffer).await;
buffer
}编译器会将其展开为类似这样的状态机:
enum ReadToStringFuture<'a> {
Init { socket: &'a TcpStream },
Reading {
socket: &'a TcpStream,
buffer: String,
read_future: ReadFuture<'a>, // 可能持有对 buffer 的引用!
},
Done,
}问题在于:如果 ReadFuture 持有 buffer 的引用,那么移动 ReadToStringFuture 将使该引用失效。Pin 通过禁止移动来解决这个问题:
impl<'a> Future for ReadToStringFuture<'a> {
type Output = String;
fn poll(self: Pin<&mut Self>, cx: &mut Context<'_>) -> Poll<String> {
// Pin 保证了 self 不会被移动
// 即使内部有自引用也是安全的
// ...
}
}核心原则:`Pin<P>` 保证了被 pin 的值在内存中的位置不会改变,除非它实现了 `Unpin`(表示移动是安全的)。

2. async/await 语法糖下的编译器魔法
2.1 状态机转换
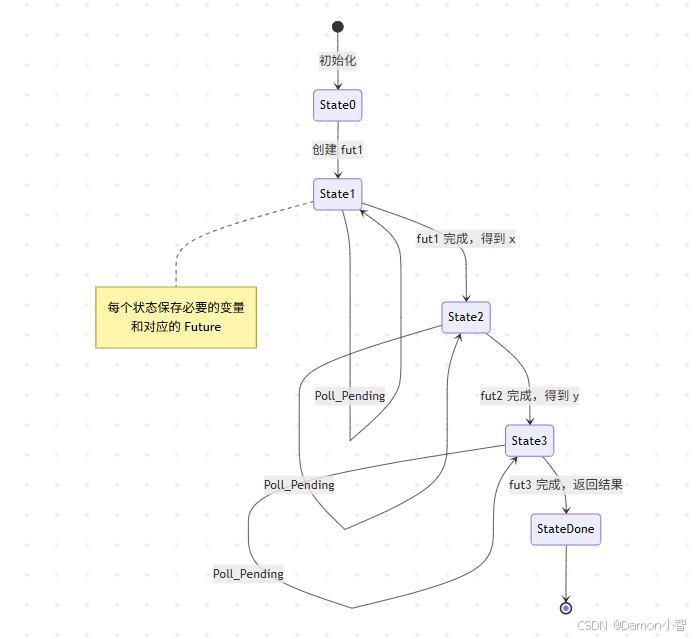
每个 await 点都是一个潜在的挂起点。编译器将 async 函数转换为状态机:
async fn complex_operation() -> i32 {
let x = async_op_1().await;
let y = async_op_2(x).await;
let z = async_op_3(y).await;
z + 1
}编译器生成的状态机大致如下:
enum ComplexOperationFuture {
State0,
State1 { fut1: AsyncOp1Future },
State2 { x: i32, fut2: AsyncOp2Future },
State3 { y: i32, fut3: AsyncOp3Future },
Done,
}
impl Future for ComplexOperationFuture {
type Output = i32;
fn poll(mut self: Pin<&mut Self>, cx: &mut Context<'_>) -> Poll<i32> {
loop {
match *self {
Self::State0 => {
*self = Self::State1 { fut1: async_op_1() };
}
Self::State1 { ref mut fut1 } => {
let x = ready!(Pin::new(fut1).poll(cx));
*self = Self::State2 { x, fut2: async_op_2(x) };
}
Self::State2 { x, ref mut fut2 } => {
let y = ready!(Pin::new(fut2).poll(cx));
*self = Self::State3 { y, fut3: async_op_3(y) };
}
Self::State3 { y, ref mut fut3 } => {
let z = ready!(Pin::new(fut3).poll(cx));
*self = Self::Done;
return Poll::Ready(z + 1);
}
Self::Done => panic!("polled after completion"),
}
}
}
}性能优势:
-
零堆分配(状态机是 enum,大小在编译时已知)
-
每次 poll 都是简单的 match 跳转
-
编译器可以内联和优化整个调用链
2.2 生命周期与 async
async 函数的生命周期推导比同步函数更复杂:
// 这个函数借用 data,返回的 Future 必须捕获这个借用
async fn process_data<'a>(data: &'a str) -> usize {
expensive_async_computation(data).await
}
// 等价于:
fn process_data<'a>(data: &'a str) -> impl Future<Output = usize> + 'a {
async move {
expensive_async_computation(data).await
}
}关键点:返回的 Future 持有对 data 的引用,因此 Future 的生命周期受 'a 约束。
3. Waker 机制:异步调度的核心
3.1 Waker 的工作原理
Waker 是连接 Future 和执行器的桥梁:
pub struct Context<'a> {
waker: &'a Waker,
// ...
}
impl Waker {
pub fn wake(self);
pub fn wake_by_ref(&self);
}当 Future 返回 Poll::Pending 时,它必须确保在将来某个时刻调用 Waker::wake(),通知执行器重新 poll 这个 Future。
典型场景:
struct TimerFuture {
shared_state: Arc<Mutex<SharedState>>,
}
struct SharedState {
completed: bool,
waker: Option<Waker>,
}
impl Future for TimerFuture {
type Output = ();
fn poll(self: Pin<&mut Self>, cx: &mut Context<'_>) -> Poll<()> {
let mut shared_state = self.shared_state.lock().unwrap();
if shared_state.completed {
Poll::Ready(())
} else {
// 保存 waker,定时器线程会用它唤醒任务
shared_state.waker = Some(cx.waker().clone());
Poll::Pending
}
}
}
// 在定时器线程中:
fn timer_thread(shared_state: Arc<Mutex<SharedState>>) {
thread::sleep(Duration::from_secs(1));
let mut state = shared_state.lock().unwrap();
state.completed = true;
if let Some(waker) = state.waker.take() {
waker.wake(); // 通知执行器重新 poll
}
}3.2 Waker 的实现细节
Waker 内部使用虚表(vtable)实现类型擦除:
pub struct RawWaker {
data: *const (),
vtable: &'static RawWakerVTable,
}
pub struct RawWakerVTable {
clone: unsafe fn(*const ()) -> RawWaker,
wake: unsafe fn(*const ()),
wake_by_ref: unsafe fn(*const ()),
drop: unsafe fn(*const ()),
}这种设计允许不同的运行时实现自己的唤醒机制,而不需要泛型(避免单态化开销)。
4. Tokio 运行时深度剖析
4.1 工作窃取调度器
Tokio 使用多线程工作窃取调度器:
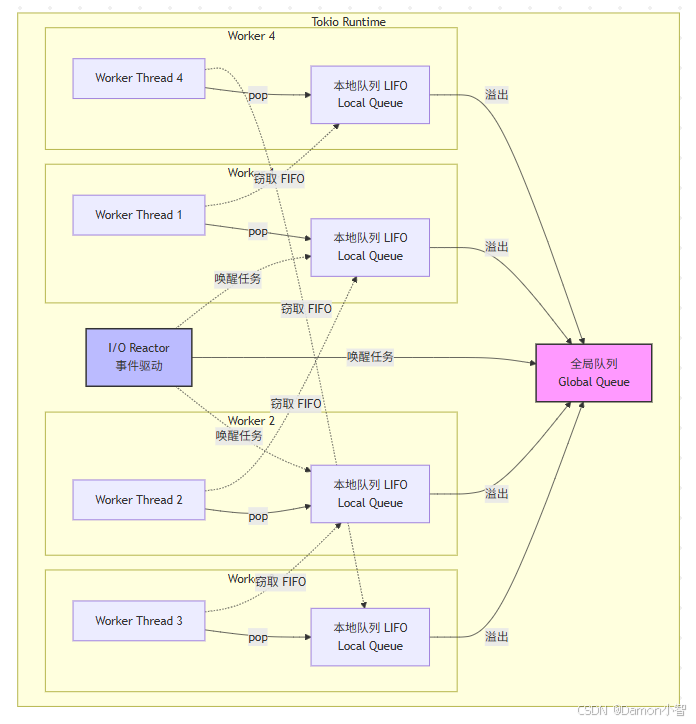
核心组件:
1. 本地队列:每个 worker 线程有自己的任务队列(LIFO,利用缓存局部性)
2. 全局队列:当本地队列满时,任务溢出到全局队列
3. 工作窃取:空闲的 worker 从其他 worker 的队列尾部窃取任务(FIFO)
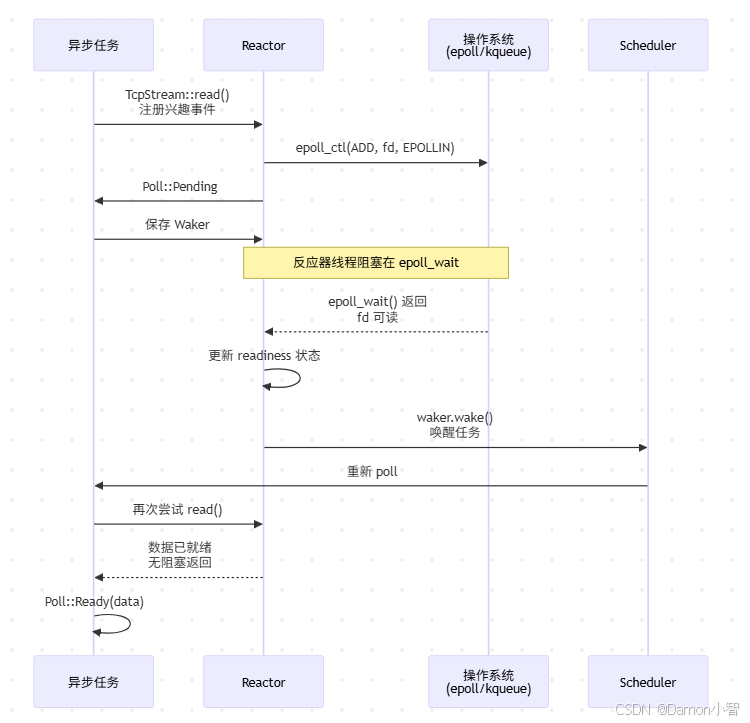
4.2 反应器(Reactor)
Tokio 的 I/O 反应器基于操作系统的事件通知机制(Linux 上的 epoll,macOS 上的 kqueue,Windows 上的 IOCP):
pub struct Reactor {
// epoll/kqueue/IOCP 的封装
io_driver: mio::Poll,
// I/O 资源注册表
resources: Slab<ScheduledIo>,
}
struct ScheduledIo {
readiness: AtomicUsize, // 可读/可写状态
wakers: Mutex<Waiters>, // 等待此 I/O 的 Waker 列表
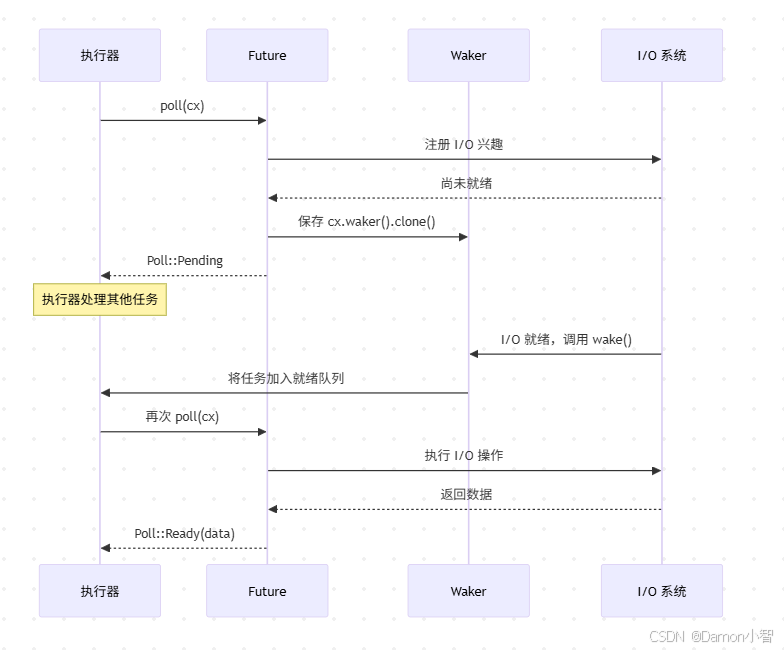
}工作流程:
-
异步 I/O 操作(如
TcpStream::read())向反应器注册兴趣事件 -
操作返回
Poll::Pending,并将 Waker 保存到ScheduledIo -
反应器线程调用
epoll_wait,阻塞等待 I/O 事件 -
当事件就绪时,反应器更新
readiness,并调用所有相关的Waker -
调度器重新 poll 对应的 Future,此时 I/O 操作可以无阻塞地完成
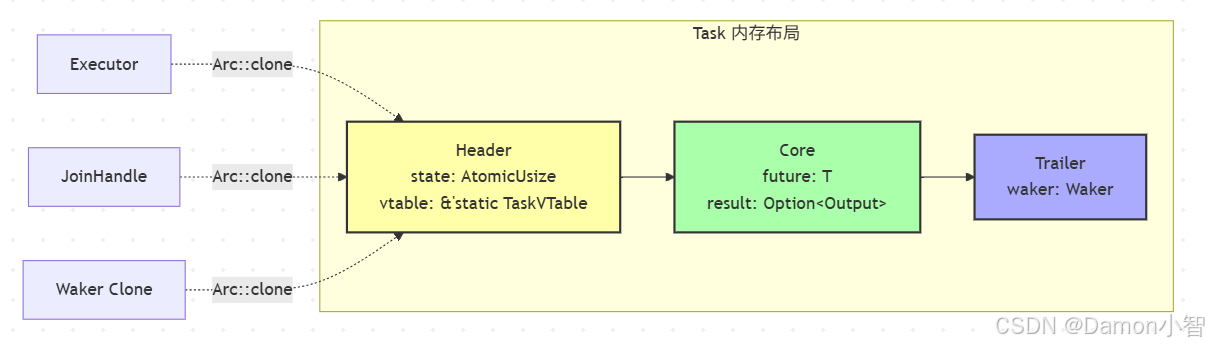
4.3 任务(Task)的内存布局
Tokio 的任务是这样布局的:
struct Task<T> {
header: Header,
core: Core<T>,
trailer: Trailer,
}
struct Header {
state: AtomicUsize, // 任务状态(运行中、完成、取消等)
vtable: &'static TaskVTable,
}
struct Core<T> {
future: T, // 实际的 Future
result: Option<Output>,
}
struct Trailer {
waker: Waker, // 用于唤醒任务的 Waker
}任务通过 Arc 管理生命周期,允许从多个位置(执行器、JoinHandle、Waker)引用同一个任务。
5. 异步性能优化实战
5.1 减少轮询开销
问题:频繁的轮询会带来开销。
优化:使用 `select!` 或 `join!` 时,理解其轮询策略:
// 低效:按顺序轮询,第一个分支会被过度轮询
select! {
_ = very_fast_future() => {},
_ = slow_future() => {},
}
// 优化:使用 biased 明确优先级(如果需要)
select! {
biased;
_ = critical_future() => {},
_ = normal_future() => {},
}
// 或者使用 FuturesUnordered 实现公平轮询
let mut futures = FuturesUnordered::new();
futures.push(future1);
futures.push(future2);
while let Some(result) = futures.next().await {
// ...
}5.2 避免任务过度生成
问题:每个 `tokio::spawn` 都有开销(堆分配、状态管理)。
优化:批处理或使用流处理:
// 低效:为每个项生成一个任务
for item in items {
tokio::spawn(async move {
process(item).await;
});
}
// 优化:使用流处理
use futures::stream::{self, StreamExt};
stream::iter(items)
.for_each_concurrent(10, |item| async move {
process(item).await;
})
.await;5.3 利用`task_local` 避免锁竞争
问题:多个任务共享状态时,锁竞争会降低性能。
优化:使用任务本地存储:
tokio::task_local! {
static REQUEST_ID: Uuid;
}
async fn handle_request(id: Uuid) {
REQUEST_ID.scope(id, async {
// 在此作用域内,所有异步调用都可以访问 REQUEST_ID
// 无需传递参数或使用锁
log_with_request_id().await;
}).await;
}
async fn log_with_request_id() {
REQUEST_ID.with(|id| {
println!("Request ID: {}", id);
});
}5.4 理解`yield_now` 的使用场景
async fn cpu_intensive_with_breaks() {
for chunk in data.chunks(1000) {
process_chunk(chunk);
// 给其他任务运行的机会,避免独占 worker 线程
tokio::task::yield_now().await;
}
}6. 高级模式与陷阱
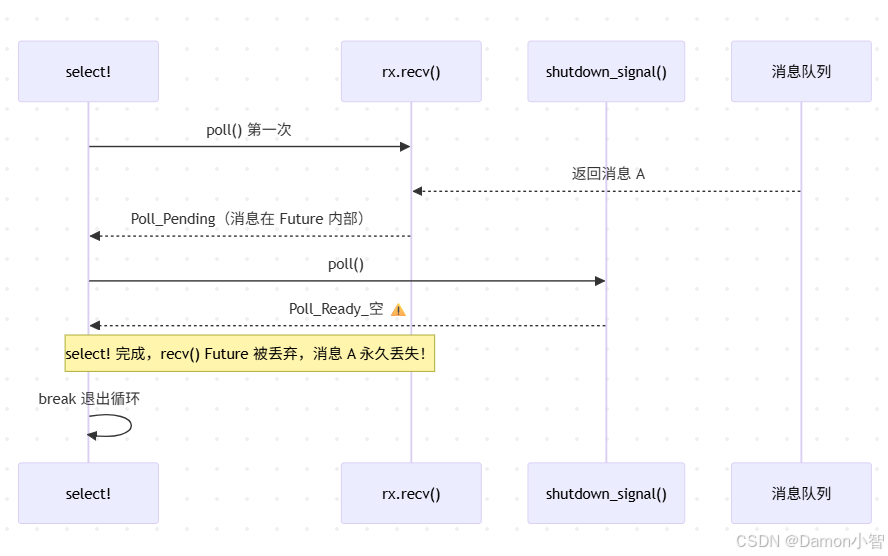
6.1 取消安全(Cancellation Safety)
并非所有 Future 都是取消安全的。考虑:
async fn process_messages(rx: &mut mpsc::Receiver<Message>) {
loop {
select! {
msg = rx.recv() => {
// 如果另一个分支先完成,msg 会被丢弃!
process(msg).await;
}
_ = shutdown_signal() => break,
}
}
}问题:如果 `shutdown_signal()` 先完成,已接收但未处理的消息会丢失。
解决方案:使用取消安全的 API 或手动管理状态:
async fn process_messages(rx: &mut mpsc::Receiver<Message>) {
let mut recv_fut = rx.recv();
loop {
select! {
msg = &mut recv_fut => {
process(msg).await;
recv_fut = rx.recv(); // 重新创建 Future
}
_ = shutdown_signal() => break,
}
}
}6.2 避免异步锁的死锁
// 危险:持有锁跨越 await 点
async fn deadlock_example(mutex: Arc<Mutex<Data>>) {
let guard = mutex.lock().await;
expensive_async_operation().await; // 锁仍被持有!
drop(guard);
}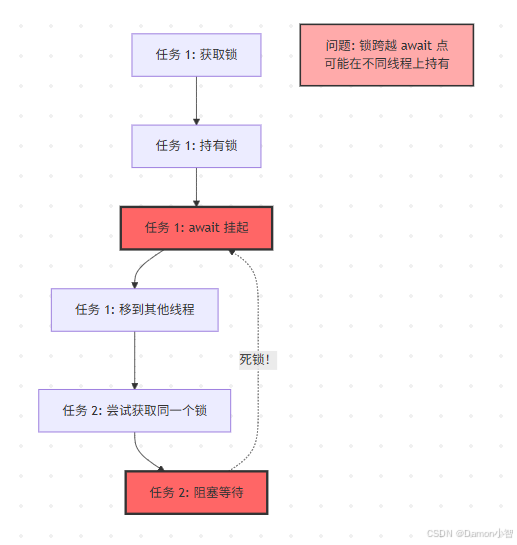
最佳实践:尽可能缩短锁的持有时间:
async fn better_example(mutex: Arc<Mutex<Data>>) {
let data = {
let guard = mutex.lock().await;
guard.clone() // 或提取所需数据
}; // 锁在此释放
expensive_async_operation_with(data).await;
}6.3 实现自定义 Future
有时你需要实现自定义 Future 来实现特殊的控制流:
struct Timeout<F> {
future: F,
deadline: Instant,
delay: Option<tokio::time::Sleep>,
}
impl<F: Future> Future for Timeout<F> {
type Output = Result<F::Output, Elapsed>;
fn poll(mut self: Pin<&mut Self>, cx: &mut Context<'_>) -> Poll<Self::Output> {
// 先检查内部 future
if let Poll::Ready(output) = unsafe {
self.as_mut().map_unchecked_mut(|s| &mut s.future).poll(cx)
} {
return Poll::Ready(Ok(output));
}
// 然后检查超时
let delay = self.delay.get_or_insert_with(|| {
tokio::time::sleep_until(self.deadline)
});
match unsafe { Pin::new_unchecked(delay) }.poll(cx) {
Poll::Ready(_) => Poll::Ready(Err(Elapsed)),
Poll::Pending => Poll::Pending,
}
}
}7. 异步生态系统最佳实践
7.1 选择正确的运行时
- Tokio:功能最全,生态最好,适合大多数场景
- async-std:API 设计更接近标准库,适合快速原型
- smol:轻量级,适合嵌入式或低资源环境
- Embassy:专为嵌入式设计,支持 no_std
7.2 错误处理
使用 ? 操作符在异步代码中传播错误:
async fn fetch_and_parse(url: &str) -> Result<Data, Error> {
let response = reqwest::get(url).await?;
let text = response.text().await?;
let data = serde_json::from_str(&text)?;
Ok(data)
}7.3 结构化并发
使用 tokio::try_join! 或 futures::future::try_join_all 实现结构化并发:
async fn fetch_all(urls: Vec<String>) -> Result<Vec<Response>, Error> {
let futures = urls.into_iter().map(|url| fetch(url));
futures::future::try_join_all(futures).await
}8. 总结
Rust 的异步编程模型通过以下设计实现了性能和安全的平衡:
1. 零成本抽象:Future 是惰性的状态机,编译为高效的机器码
2. 类型安全:Pin 和生命周期系统防止了悬垂指针和数据竞争
3. 灵活性:运行时无关的设计允许不同的执行策略
4. 可组合性:Future 可以自由组合,形成复杂的异步工作流

理解这些底层机制不仅能帮助你写出更高效的异步代码,还能让你在遇到问题时快速定位根因。随着 Rust 异步生态的不断成熟,掌握这些核心概念将让你在系统编程领域如虎添翼。
参考资源

有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐


 21
21 0
0- 0



 已为社区贡献15条内容
已为社区贡献15条内容

所有评论(0)