【ESP32接入最新国产豆包大模型教程】
本文介绍如何通过ESP32S3接入国产大语言模型"豆包"升级版,实现自然语言控制LED灯亮度和舵机角度。文章提供了详细教程和优化指令集,并对比了豆包与其他国产大模型(如讯飞星火、MiniMax等)在响应时间、内容质量及免费token次数等方面的表现。文中包含豆包大模型的注册地址、技术架构说明(与火山引擎、火山方舟的关系)及API开发指南。作者强调教程无广告,已匿名处理源代码,便
【ESP32接入最新国产豆包大模型教程】
前言
随着国产大语言模型的发展,我们不仅可以用它来回答问题、写代码,还可以让它直接控制硬件设备,现在逐步添加最新的大模型支持。这个是基于【ESP32接入国产大模型之豆包】,【ESP32接入国产豆包大模型控制灯和舵机】升级的哦!😘😘😘💕💕💕
用 ESP32 接入“豆包”最新大模型,不仅实现通过自然语言控制 LED 灯亮度和舵机角度!优化指令集可查看大模型状态。🤣🤣🤣
首先声明没有恰饭广告,源代码已经匿名处理,制作细节非常完善,方便大家复刻才会提供快捷的相关链接跳转!!!😘😘😘
本文将重点介绍如何通过ESP32S3接入国产大模型之豆包升级版。
上一篇博客已经分享了:
【ESP32接入国产大模型之腾讯混元】
【ESP32接入国产大模型之豆包】
【ESP32接入国产大模型之星火】
【ESP32接入国产大模型之MiniMax】
【ESP32接入语言大模型之智谱清言】
【ESP32接入国产大模型之文心一言】
【ESP32接入语言大模型之通义千问】
【ESP32接入国产大模型之kimi】
【ESP32接入国产大模型之Deepseek】
【ESP32接入国产大模型之阿里Deepseek】
【ESP32接入国产大模型之豆包升级版】
【ESP32接入国产豆包大模型控制灯和舵机】
下面是不标准测评,参考而已:
| 模型 | 响应时间 | 内容质量 | 免费token次数 | 地址 |
|---|---|---|---|---|
| 豆包 | 2s | 9分 | 50万 | https://www.volcengine.com/product/doubao |
| 讯飞星火 | 4s | 8分 | 1亿 | https://www.xfyun.cn/doc/spark/HTTP%E8%B0%83%E7%94%A8%E6%96%87%E6%A1%A3.html |
| MiniMax | 3s | 8分 | 500万 | https://www.minimaxi.com/ |
| 智谱清言 | 7s | 7分 | 300万 | https://open.bigmodel.cn/ |
| 文心一言 | 10s | 7分 | 500万 | https://cloud.baidu.com/doc/WENXINWORKSHOP/s/Nlks5zkzu |
| 通义千问 | 8s | 7分 | 800万 | https://tongyi.aliyun.com/qianwen/ |
| Kimi | 2s | 9分 | 50万 | https://platform.moonshot.cn/docs/guide/start-using-kimi-api |
| 混元 | 6s | 8分 | 50万 | https://cloud.tencent.com/document/product/1729/105701 |
| Deepseek | 12s | 9分 | 50万 | https://api-docs.deepseek.com/ |
| 阿里Deepseek | 10s | 9分 | 50万 | https://help.aliyun.com/zh/model-studio/developer-reference/deepseek?spm=a2c4g.11186623.help-menu-search-2400256.d_1#2048aa1f92x46 |
这一次还是采用Platformio编程就会轻松许多开发。这样就可以把大模型装进口袋啦🤣🤣🤣
1. 豆包大模型
请大家点击豆包火山注册地址,不注册是不能完成下面的实验哦:https://t.vncps.com/5LOve
谢谢啦大家的支持💖💖💖
豆包与火山方舟、火山引擎之间的关系主要体现为技术同源、产品定位互补,三者均隶属于字节跳动旗下。具体联系如下:
🛠️ 1. 火山引擎:底层技术基座
定位:字节跳动推出的企业级云服务平台,提供云计算、大数据、AI 中台、容器服务等基础技术能力。 功能:为火山方舟提供算力支持(GPU
集群)、模型训练 / 推理框架、数据存储等基础设施。 关系:是豆包和火山方舟的技术底层支撑。🤖 2. 豆包:AI 产品化终端应用
定位:面向公众的AI 对话助手(类似 ChatGPT),可提供问答、写作、编程等能力。 技术来源:依赖于火山引擎的算力资源及自研大模型(如
Skywork 天工、Cloud 系列模型)。 产品形态:直接向用户提供服务的 C 端应用(网页 / App),如 doubao.com。🔧 3. 火山方舟:AI 模型开发与服务平台
定位:聚焦于企业级 AI 模型的开发、部署与管理平台(类似百度文心千帆)。 核心功能:
模型接入:支持集成第三方大模型(如百川、MiniMax)。 工具链:提供模型精调(Fine-tuning)、评测、API 部署等工具。
场景方案:针对企业需求定制客服、营销等 AI 解决方案。 与豆包的联系: 技术同源:共用火山引擎的 AI 训练框架和推理加速技术。
能力互补:企业可通过火山方舟训练模型,再以 SDK/API 形式接入自身产品(如集成类似豆包的聊天功能)。
模型共享:豆包的底层模型可能通过火山方舟向企业客户开放定制。
产品简介:https://www.volcengine.com/docs/82379/1099455
1.1 方舟定位
为您提供大模型服务的开发平台,提供功能丰富、安全以及具备价格竞争力的模型调用服务,同时提供模型数据、精调、推理、评测等端到端功能,全方位保障您的 AI 应用开发落地。
1. 极速体验
您可以访问火山方舟大模型体验中心,免登录极速体验模型能力。
点击页面中心的模型切换按钮,可以切换体验Doubao或DeepSeek系列模型能力。
未登录状态下可以体验部分模型。如果您需要体验所有模型能力,建议您登录火山引擎账号,选择并开通模型。
点击开启MCP服务器,可以连接使用更多火山云产品与三方工具。
您也可以尝试选择下方的图片理解任务进行尝试。
1.3 深度思考
官方文档:https://www.volcengine.com/docs/82379/1449737
您可以使用具备深度思考能力的模型,如 deepseek r1、doubao thinking 系列模型,来提升最终答案的准确性。模型在回答问题前,会对问题进行分析和拆解,并基于对问题的拆解回答问题,回答会更加全面和深入。当您向模型提问时,方舟返回模型回答问题前的问题思考逻辑(思维链内容),基于此可观察模型推导过程并使用这部分信息。
1.4 最新模型选择
地址:https://www.volcengine.com/docs/82379/1330310
方舟提供多种模型供您使用。您可依据教程或者API说明,便捷地将模型服务整合到自身业务当中。

2.1 环境配置
- Arduino IDE:下载并安装 Arduino IDE;
- ESP32 开发板库:在 Arduino IDE 中添加 ESP32 支持;
参考博客:【esp32c3配置arduino IDE教程】
为安装过程留出一些时间,具体时间可能因您的互联网连接而异。
2.2 所需零件
要学习本教程,您需要1个 ESP32 开发板或者ESP32C3,建议使用后者,笔者发现同样的代码后者可以轻松调用,ESP32不行(可能板子坏了)。
目前这是我使用的ESP32S3官方硬件👍👍👍(小小的身材有大大的力量)只需要35元加摄像头麦克风79元,后期我会整理相关专栏进行Arduino系统学习😘😘😘。有需要可以购买xiao开发板💕💕💕
-
SeeedXIAO ESP32S3 Sense硬件购买地址:https://s.click.taobao.com/lekazrt

-
ESP32-S3-CAM 核心开发板 N16R8 wifi蓝牙模块 OV2640摄像头硬件购买地址:https://s.click.taobao.com/1PTagos

- ESP32-S3 NANO开发板 虾哥小智AI 蓝牙WiFi核心板N16R8兼容立创S3

WiFi+蓝牙模块 + OV2640/5640摄像头!!高性能S3芯片!多功能开发!创新设计!!板载天线,稳定连接!!关键是全能开发套装!!
【下单链接】https://s.click.taobao.com/3eH0Gmq
上面硬件丝选一,我是第四款硬件
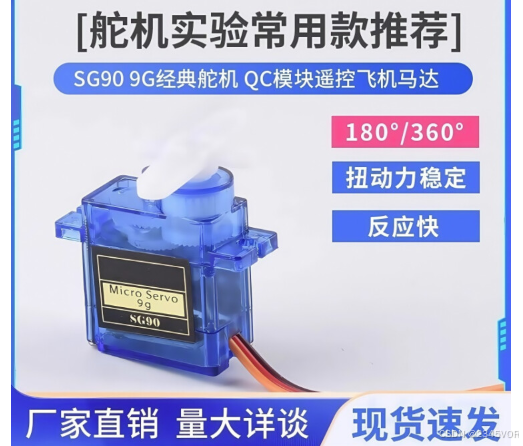
舵机选择,sg90舵机小型航模大扭力舵机伺服控制模块MG90S微型经典舵机云台
【下单链接】https://s.click.taobao.com/gbAzFmq
LED 引脚接 ESP32 的 GPIO2(可改),这个第四块开发板自带管脚2的LED
舵机信号线接 GPIO3(可改)
GND 公共接地
舵机电源建议单独供电(防止电流过大重启)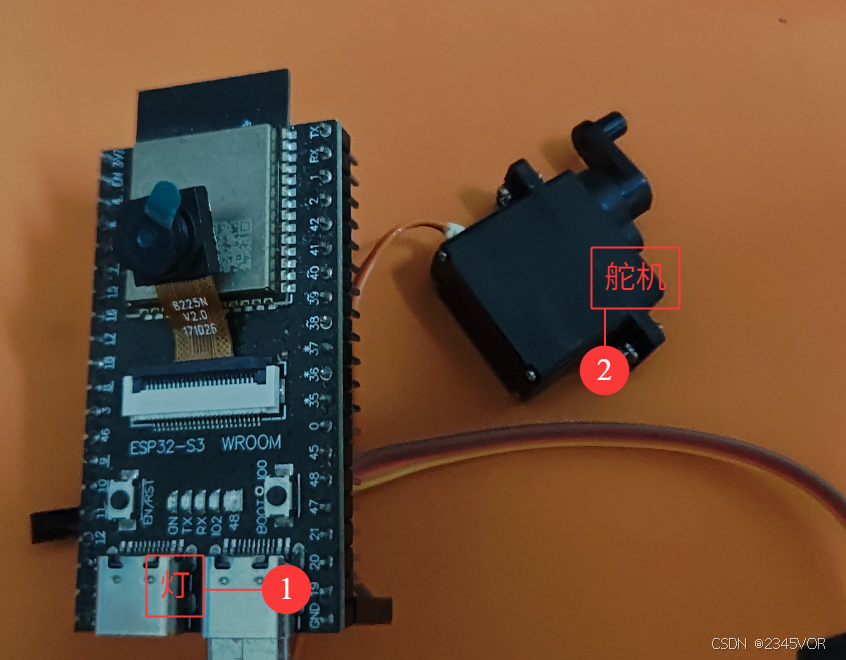
3. 核心代码
对话参考案例:https://www.volcengine.com/docs/82379/1449737
请求数据
curl https://ark.cn-beijing.volces.com/api/v3/chat/completions \
-H "Content-Type: application/json" \
-H "Authorization: Bearer $ARK_API_KEY" \
-d '{
"model": "doubao-seed-1-6-250615",
"messages": [
{
"role": "user",
"content": "我要研究深度思考模型与非深度思考模型区别的课题,怎么体现我的专业性"
}
]
}'

3.1 源码分享
#include <Arduino.h>
#include <WiFi.h>
#include <HTTPClient.h>
#include <ArduinoJson.h>
#include <driver/ledc.h>
#include <esp_task_wdt.h> // 引入ESP32看门狗库
#include <ESP32Servo.h>
// 硬件配置
#define LED_PIN 2 // PWM调光引脚
#define SERVO_PIN 3 // 舵机控制引脚
Servo myservo; // create servo object to control a servo
// 网络配置
const char *ssid = "IQOO";
const char *password = "12345678";
String apiKey = "Bearer 211f9e11-cd39-4a68-b4a605822";
String apiUrl = "https://ark.cn-beijing.volces.com/api/v3/chat/completions";
// 模型定义
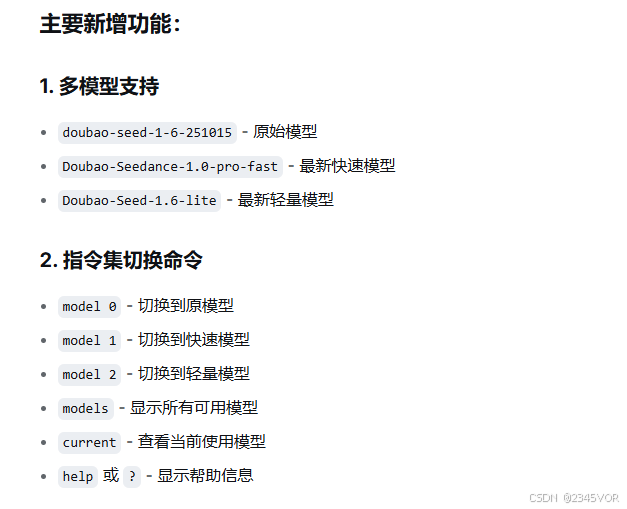
#define MODEL_COUNT 3
const String models[MODEL_COUNT] = {
"doubao-seed-1-6-251015", // 模型0: 原模型
"doubao-seed-1-6-flash-250828", // 模型1: 最新快速模型
"doubao-seed-1-6-lite-251015" // 模型2: 最新轻量模型
};
String currentModel = models[0]; // 默认使用原模型
int currentModelIndex = 0;
// 预设指令模板
String pre_Text = "如果用户需要控制灯或者舵机,请参考以下格式回复硬件控制指令:1. LED控制(device:led,value:0-255);2. 舵机控制(device:servo,value:0-180);3. 其他回答:直接返回文本内容";
// 定义控制结构体
QueueHandle_t xCommandQueue;
struct Command {
String device;
int value;
};
// 初始化PWM
void initPWM() {
ledcSetup(1, 50, 14); // 通道1用于舵机(50Hz, 14bit)
ledcAttachPin(SERVO_PIN, 1);
pinMode(LED_PIN, OUTPUT);
analogWrite(LED_PIN, 100);
}
// 显示可用模型列表
void showModels() {
Serial.println("\n=== 可用模型列表 ===");
for (int i = 0; i < MODEL_COUNT; i++) {
Serial.printf("[%d] %s", i, models[i].c_str());
if (i == currentModelIndex) {
Serial.print(" ← 当前使用");
}
Serial.println();
}
Serial.println("使用 'model X' 切换模型 (X=0,1,2)");
Serial.println("使用 'current' 查看当前模型");
Serial.println("====================\n");
}
// 切换模型函数
void switchModel(int modelIndex) {
if (modelIndex >= 0 && modelIndex < MODEL_COUNT) {
currentModelIndex = modelIndex;
currentModel = models[modelIndex];
Serial.printf("[系统] 已切换到模型: %s\n", currentModel.c_str());
} else {
Serial.println("[错误] 无效的模型编号,请使用 0, 1, 2");
}
}
// 处理系统指令
bool handleSystemCommand(String input) {
input.trim();
input.toLowerCase();
if (input == "help" || input == "?") {
Serial.println("\n=== 系统帮助 ===");
Serial.println("普通对话: 直接输入问题");
Serial.println("模型切换: model 0 / model 1 / model 2");
Serial.println("当前模型: current");
Serial.println("模型列表: models");
Serial.println("系统帮助: help 或 ?");
Serial.println("===============\n");
return true;
}
else if (input == "models") {
showModels();
return true;
}
else if (input == "current") {
Serial.printf("[系统] 当前使用模型: %s (编号: %d)\n", currentModel.c_str(), currentModelIndex);
return true;
}
else if (input.startsWith("model ")) {
String modelStr = input.substring(6);
modelStr.trim();
int modelIndex = modelStr.toInt();
switchModel(modelIndex);
return true;
}
return false;
}
// 控制任务
void controlTask(void *pvParameters) {
Command cmd;
while (1) {
if (xQueueReceive(xCommandQueue, &cmd, portMAX_DELAY)) {
if (cmd.device == "led") {
analogWrite(LED_PIN, cmd.value);
Serial.printf("[执行] LED亮度设置为: %d\n", cmd.value);
}
else if (cmd.device == "servo") {
int pulseWidth = map(cmd.value, 0, 180, 1000, 5000);
ledcWrite(1, pulseWidth * 8192 / 20000);
Serial.printf("[执行] 舵机角度设置为: %d°\n", cmd.value);
}
}
// 喂狗操作
esp_task_wdt_reset();
}
}
// 解析JSON响应并提取控制指令
void parseAndQueue(String jsonResponse) {
DynamicJsonDocument doc(4096); // 根据响应大小调整
DeserializationError error = deserializeJson(doc, jsonResponse);
if (error) {
Serial.printf("[错误] JSON解析失败: %s\n", error.c_str());
Serial.println("[原始响应]: " + jsonResponse);
return;
}
// 提取模型信息
const char* model = doc["model"];
const char* id = doc["id"];
// 提取回复内容
const char* content = doc["choices"][0]["message"]["content"];
const char* finishReason = doc["choices"][0]["finish_reason"];
// 提取使用情况
JsonObject usage = doc["usage"];
int totalTokens = usage["total_tokens"];
int promptTokens = usage["prompt_tokens"];
int completionTokens = usage["completion_tokens"];
Serial.println("\n=== AI回复 ===");
Serial.printf("模型: %s\n", model);
Serial.printf("回复ID: %s\n", id);
Serial.printf("完成状态: %s\n", finishReason);
Serial.println("--------------");
Serial.printf("内容: %s\n", content);
Serial.println("--------------");
Serial.printf("Token使用: 总计%d (输入%d + 输出%d)\n", totalTokens, promptTokens, completionTokens);
Serial.println("==============\n");
// 检查回复内容中是否包含硬件控制指令
String contentStr = String(content);
if (contentStr.indexOf("device:") != -1 && contentStr.indexOf("value:") != -1) {
int deviceStart = contentStr.indexOf("device:") + 7;
int deviceEnd = contentStr.indexOf(",", deviceStart);
String device = contentStr.substring(deviceStart, deviceEnd);
device.trim();
int valueStart = contentStr.indexOf("value:") + 6;
int valueEnd = contentStr.indexOf(")", valueStart);
int value = contentStr.substring(valueStart, valueEnd).toInt();
// 参数范围验证
if (device == "led") value = constrain(value, 0, 255);
if (device == "servo") value = constrain(value, 0, 180);
Command cmd = {device, value};
xQueueSend(xCommandQueue, &cmd, 0);
Serial.printf("[解析] 设备: %s, 值: %d\n", device.c_str(), value);
}
}
// 发送HTTP请求并获取API响应
String getGPTAnswer(String inputText) {
HTTPClient http;
http.setTimeout(15000); // 增加超时时间以适应不同模型
http.setReuse(false);
Serial.printf("[请求] 使用模型: %s\n", currentModel.c_str());
Serial.println("[请求] 发送中...");
http.begin(apiUrl);
http.addHeader("Content-Type", "application/json");
http.addHeader("Authorization", apiKey);
// 转义特殊字符
inputText.replace("\"", "\\\"");
inputText.replace("\n", "\\n");
String payload = "{\"model\":\"" + currentModel + "\",\"messages\":[{\"role\": \"system\",\"content\": \"" + pre_Text + "\"},{\"role\": \"user\",\"content\": \"" + inputText + "\"}]}";
int httpResponseCode = http.POST(payload);
if (httpResponseCode == 200) {
String response = http.getString();
http.end();
Serial.println("[请求] 响应成功");
return response;
} else {
String errorResponse = http.getString();
http.end();
// 尝试解析错误响应
DynamicJsonDocument errorDoc(1024);
DeserializationError error = deserializeJson(errorDoc, errorResponse);
if (!error && errorDoc.containsKey("error")) {
const char* errorMessage = errorDoc["error"]["message"];
Serial.printf("[错误] HTTP代码: %d, 错误信息: %s\n", httpResponseCode, errorMessage);
} else {
Serial.printf("[错误] HTTP代码: %d\n", httpResponseCode);
Serial.println("[错误响应]: " + errorResponse);
}
return "<error>";
}
}
// HTTP请求任务
void httpTask(void *pvParameters) {
while (1) {
if (Serial.available()) {
String userInput = Serial.readStringUntil('\n');
userInput.trim();
// 检查是否是系统指令
if (handleSystemCommand(userInput)) {
// 系统指令已处理,跳过AI请求
continue;
}
// 普通对话,发送到AI
Serial.printf("\n[用户] %s\n", userInput.c_str());
String response = getGPTAnswer(userInput);
if (response != "<error>") {
parseAndQueue(response);
} else {
Serial.println("[错误] API请求失败,请检查网络或模型配置");
}
}
// 喂狗操作
esp_task_wdt_reset();
vTaskDelay(1000 / portTICK_PERIOD_MS);
}
}
void setup() {
// Initialize Serial
Serial.begin(115200);
// Connect to Wi-Fi network
WiFi.mode(WIFI_STA);
WiFi.begin(ssid, password);
Serial.print("Connecting to WiFi ..");
while (WiFi.status() != WL_CONNECTED) {
Serial.print('.');
delay(1000);
}
Serial.println("\nConnected! IP: " + WiFi.localIP().toString());
initPWM();
xCommandQueue = xQueueCreate(5, sizeof(Command));
// 初始化看门狗,设置超时时间为10秒
esp_task_wdt_init(10, true);
esp_task_wdt_add(NULL); // 将当前任务添加到看门狗监控中
// 创建任务
xTaskCreatePinnedToCore(controlTask, "Control", 4096, NULL, 2, NULL, 0);
xTaskCreatePinnedToCore(httpTask, "HTTP", 8192, NULL, 1, NULL, 1);
Serial.println("\n=== 豆包大模型硬件控制系统 ===");
Serial.println("系统初始化完成!");
showModels();
Serial.println("输入 'help' 查看使用说明");
Serial.println("============================\n");
}
void loop() {
// 主循环只负责喂狗
esp_task_wdt_reset();
delay(1000);
}
3.2 源码解析
- 导入库文件:
#include <WiFi.h>
#include <HTTPClient.h>
#include <ArduinoJson.h>
- 定义Wi-Fi网络凭证:
const char *ssid = "IQOO";
const char *password = "12345678";
- 定义API Key:
String apiKey = "Bearer 211f9e11-cd39-4a68-b4a605822";
管理APIKEY地址:https://console.volcengine.com/ark/region:ark+cn-beijing/apiKey?apikey=%7B%7D&projectName=default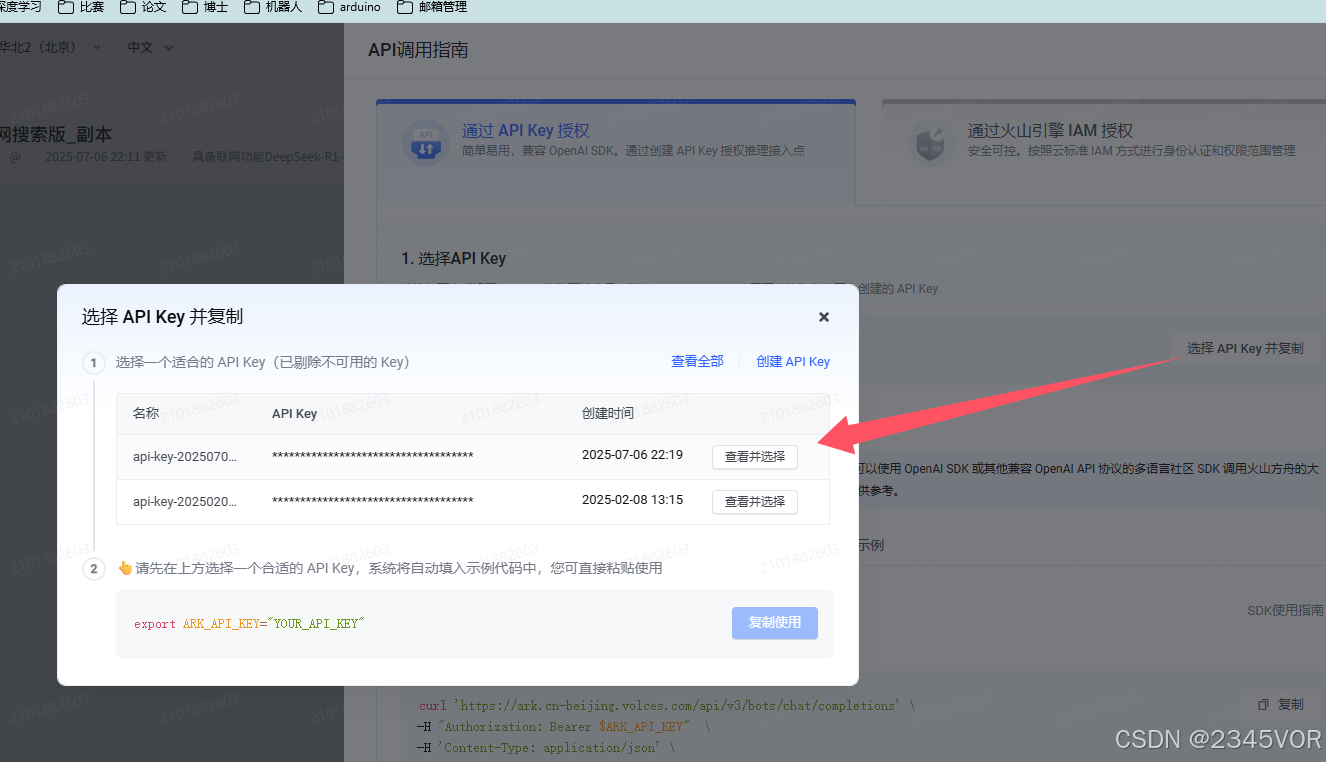
4. 上传验证
下面给出下载配置,请严格配置
4.1 platformio.ini
[env:freenove_esp32_s3_wroom]
platform = espressif32
board = freenove_esp32_s3_wroom
framework = arduino
lib_deps =
bblanchon/ArduinoJson@^7.4.2
madhephaestus/ESP32Servo@^3.0.8
4.2 对话测试
打开串口监视器,注意右下角选择回车符,选择115200波特率,输入你想问的问题,它就可以回答你。
- 测试效果
串口输入:
把舵机转到45度
AI 响应:
(device:servo,value:45)
控制任务输出:
[执行] 舵机角度: 45°
LED 灯控制同理,例如:
灯亮度调成一半
会解析为:
(device:led,value:128)
---- 已打开串行端口 COM11 ----
---- 已发送 utf8 编码消息: "打开灯" ----
[用户] 打开灯
[请求] 使用模型: doubao-seed-1-6-251015
[请求] 发送中...
[请求] 响应成功
=== AI��复 ===
模型: doubao-seed-1-6-251015
回复ID: 0217627879909809e37bd9714fa325a144f80ed4093445ad71550
完成状态: stop
--------------
内容: (device:led,value:255)
--------------
Token使用: 总计167 (输入100 + ���出67)
==============
[解��] 设备: led, 值: 255
[执行] LED亮度设置为: 255
---- 已发送 utf8 编码消息: "current" ----
[系统] 当前使用模型: doubao-seed-1-6-251015 (编号: 0)
---- 已发送 utf8 编码消息: "model 1" ----
[系统] 已切换到模型: doubao-seed-1-6-flash-250828
---- 已发送 utf8 编码消息: "关闭灯" ----
[用户] 关闭灯
[请求] 使用模型: doubao-seed-1-6-flash-250828
[请求] 发送中...
[请求] 响应成功
=== AI��复 ===
模型: doubao-seed-1-6-flash-250828
回复ID: 021762788015747aca79f59198e4bdac01b72c58693596351fc26
完成状态: stop
--------------
内容: LED控制(device:led,value:0)
--------------
Token使用: 总计230 (输入151 + 输出79)
==============
[解析] 设备: led, 值: 0
[执行] LED亮度设置为: 0
---- 已发送 utf8 编码消息: "你是谁" ----
[用户] 你是谁
[请求] 使用模型: doubao-seed-1-6-flash-250828
[请求] 发送中...
[请求] 响应成功
=== AI��复 ===
模型: doubao-seed-1-6-flash-250828
回复ID: 02176278804095142a36b1033b5cf9f6429381c66119fa7b8d13e
完成状态: stop
--------------
内容: 我是字节跳动研发的人工智��豆包,能够为你提供信���咨询、知识解答、生活建议等方面的帮助。如��你有硬件控制相关的需���,比如控制灯或舵机,可以按照指定格式提供��令。
--------------
Token使用: 总计260 (输入151 + 输���109)
==============
存在舵机峰值电流过大导致重启,可额外供电。有时候会因为网络无法控制,导致指令失败,建议换一个好一点的2.4G网络,本项目演示了ESP32 + 国产大模型 + 自然语言控制硬件的完整流程,适合智能家居、机器人等场景。
后续可以优化:
- 增加更多外设(风扇、电机、继电器等)
- 用 WebSocket 代替 HTTP 提升响应速度
- 在 ESP32 上做离线指令解析以减少网络依赖
有了这个基础,你的 ESP32 就能听懂人话啦!
4.3 错误码
如果执行报错,请参见错误信息进行解决。
5. 总结
现在,本项目演示了ESP32 + 豆包最新大模型 + 自然语言控制硬件的完整流程,适合智能家居、机器人等场景。从而实现对外部世界的感知,充分认识这个有机与无机的环境,后期会持续分享ESP32跑FreeRTOS实用案例,为人类社会发展贡献一点微薄之力。🙌🙌🙌
如果你有任何问题,可以通过Q Group(945348278)加入鹏鹏小分队,期待与你思维的碰撞! 😘😘😘

有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐

 19
19 0
0- 0



 已为社区贡献39条内容
已为社区贡献39条内容

所有评论(0)