AI学习笔记整理(二)—— 物理AI与仿真软件
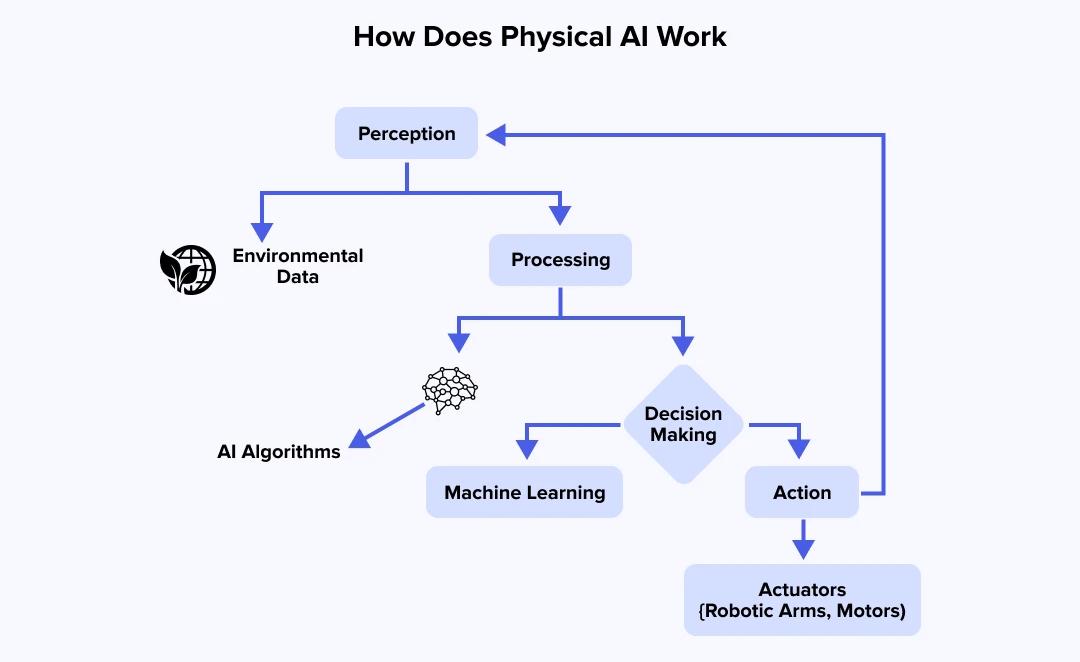
:指具备感知、理解并能在现实世界执行复杂操作的技术,通过传感器、运动控制模块实现物理世界中的“感知-决策-执行”闭环。。
物理AI与仿真软件的区别
物理AI与仿真软件的区别主要体现在应用场景、技术架构和功能定位上:
核心差异
物理AI
-
定义:指具备感知、理解并能在现实世界执行复杂操作的技术,通过传感器、运动控制模块实现物理世界中的“感知-决策-执行”闭环。
-
应用场景:主要用于机器人、自动驾驶、工业机械等需要具身智能的领域,例如特斯拉Optimus的精准抓取、波士顿动力机器人的高难度救援操作。
仿真软件
-
定义:用于在数字环境中模拟现实场景,通过物理原理生成合成数据集,辅助AI模型训练和验证。
-
应用场景:常见于机器人开发流程,例如NVIDIA Isaac Sim平台支持机器人虚拟调试和验证,减少对实体机器人的依赖。
技术架构差异
物理AI需要整合传感器、运动控制硬件与算法,而仿真软件主要依赖计算平台(如NVIDIA Omniverse)进行虚拟测试。
功能定位
物理AI直接驱动物理设备执行任务,而仿真软件通过生成数据集辅助AI模型开发,不直接参与物理世界操作。
物理AI与仿真软件的关系
物理AI与仿真软件的关系主要体现在技术协同与应用融合方面:
技术基础
物理AI依赖高精度三维仿真生成训练数据,通过模拟现实世界的物理规律(如刚体动力学、光学交互等)来训练自主机器。仿真软件(如Abaqus)通过代理建模等技术降低计算成本,快速生成可用于AI训练的仿真数据。
训练优化
仿真软件为物理AI提供数字孪生环境,通过添加传感器和自主机器模拟现实场景,强化学习模型对物理世界的理解。例如,英伟达利用仿真软件生成的合成数据训练神经网络,使其能在真实环境中执行任务(如导航、物体操控)。
工业应用
国产工业仿真分析软件(如基于中科院技术的产品)已实现多物理场仿真,与物理AI结合后可大幅提升机器人在复杂环境中的操作精度。例如,仓储机器人通过仿真训练可更精准地完成打包、导航等任务。
物理AI落地三大关键环节
摘自链接:https://baijiahao.baidu.com/s?id=1848048464782465819&wfr=spider&for=pc
物理AI将人工智能从“数字理解”推向“物理交互”的维度跨越,已成为衡量科技企业核心竞争力的新标尺,其落地依赖三大关键环节:虚拟环境的物理建模与训练、高质量物理数据的生成与推理、真实场景的感知与决策闭环。
1)虚拟建模是物理AI的基础,其核心是通过融合经典物理定律与深度学习,构建与真实世界高度一致的仿真环境,主要通过生成式物理引擎和强化学习技术实现,结合神经网络模拟物理规律并生成训练数据。
生成式物理引擎融合经典物理定律(力学、热力学等)与深度学习,构建多物理场耦合的仿真系统,支持刚体、流体、电磁等多场景的动态模拟,这其中需要平衡仿真精度与实时性,同时具备可扩展性,能适配不同复杂度的物理场景(从简单运动到复杂材料交互)。高精度建模与实时计算存在天然矛盾,需通过算法优化(如分层积分、动态阻尼调整)缩小差距。
2)物理AI的性能依赖于高质量数据的支撑,而“合成数据+真实数据”的虚实融合模式,解决了真实物理数据稀缺、标注困难的痛点。高质量数据的生成与推理主要依赖于物理建模、数据采集技术和生成模型的结合,通过真实数据采集、物理约束优化和算法生成等方式实现。
该环节通过物理引擎生成合成数据,并结合生成式AI扩展数据多样性;推理阶段需要嵌入物理约束,实现对物体运动、交互关系的预测与归因。其中,数据需要满足“物理真实性”(符合客观规律)与 “分布全面性”(覆盖极端场景与边界条件)要求,推理过程需具备可解释性,而非纯黑盒预测。挑战在于合成数据与真实数据存在域差距,需通过数据增强、虚实融合技术缩小差异,同时物理数据的高效推理对算力与算法架构提出了更高要求。
3)物理AI的最终价值在于落地真实场景,真实场景中的感知与决策闭环主要依赖于多模态数据融合、端到端模型架构和实时算力支持,通过感知环境、理解意图、快速决策和精准执行实现闭环。
该环节将虚拟训练的模型与真实物理世界对接,完成“感知-决策-执行-反馈”的闭环迭代,让AI适配真实环境的不确定性。多传感器融合(视觉、力控、惯性测量等)实现环境与物体状态的精准感知;决策算法需结合模型预测控制与强化学习,兼顾实时性与鲁棒性。而真实环境的复杂性(非结构化、动态变化)远超虚拟场景,需要解决模型泛化能力不足的问题,同时端侧部署需要进一步平衡推理速度、精度与硬件功耗。

有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐



 9
9 0
0- 0



 已为社区贡献5条内容
已为社区贡献5条内容

所有评论(0)