【 CANN实战揭秘:从模型到落地,AI应用的高效引擎】
在当前AI技术迅猛发展的背景下,如何将复杂的AI模型高效部署到实际应用中成为了许多开发者面临的挑战。华为昇腾异构计算架构CANN(Compute Architecture for Neural Networks)作为连接上层AI框架和底层硬件的重要桥梁,正致力于解决这一难题。本文将结合真实案例,深入探讨CANN在不同场景中的落地实践,揭秘其核心功能如何发挥作用。
在当前AI技术迅猛发展的背景下,如何将复杂的AI模型高效部署到实际应用中成为了许多开发者面临的挑战。华为昇腾异构计算架构CANN(Compute Architecture for Neural Networks)作为连接上层AI框架和底层硬件的重要桥梁,正致力于解决这一难题。本文将结合真实案例,深入探讨CANN在不同场景中的落地实践,揭秘其核心功能如何发挥作用。
1 CANN是什么?为什么它如此重要?
官网:https://www.hiascend.com/cann
接口API:https://www.hiascend.com/document/detail/zh/canncommercial/82RC1/API/aolapi/operatorlist_00001.html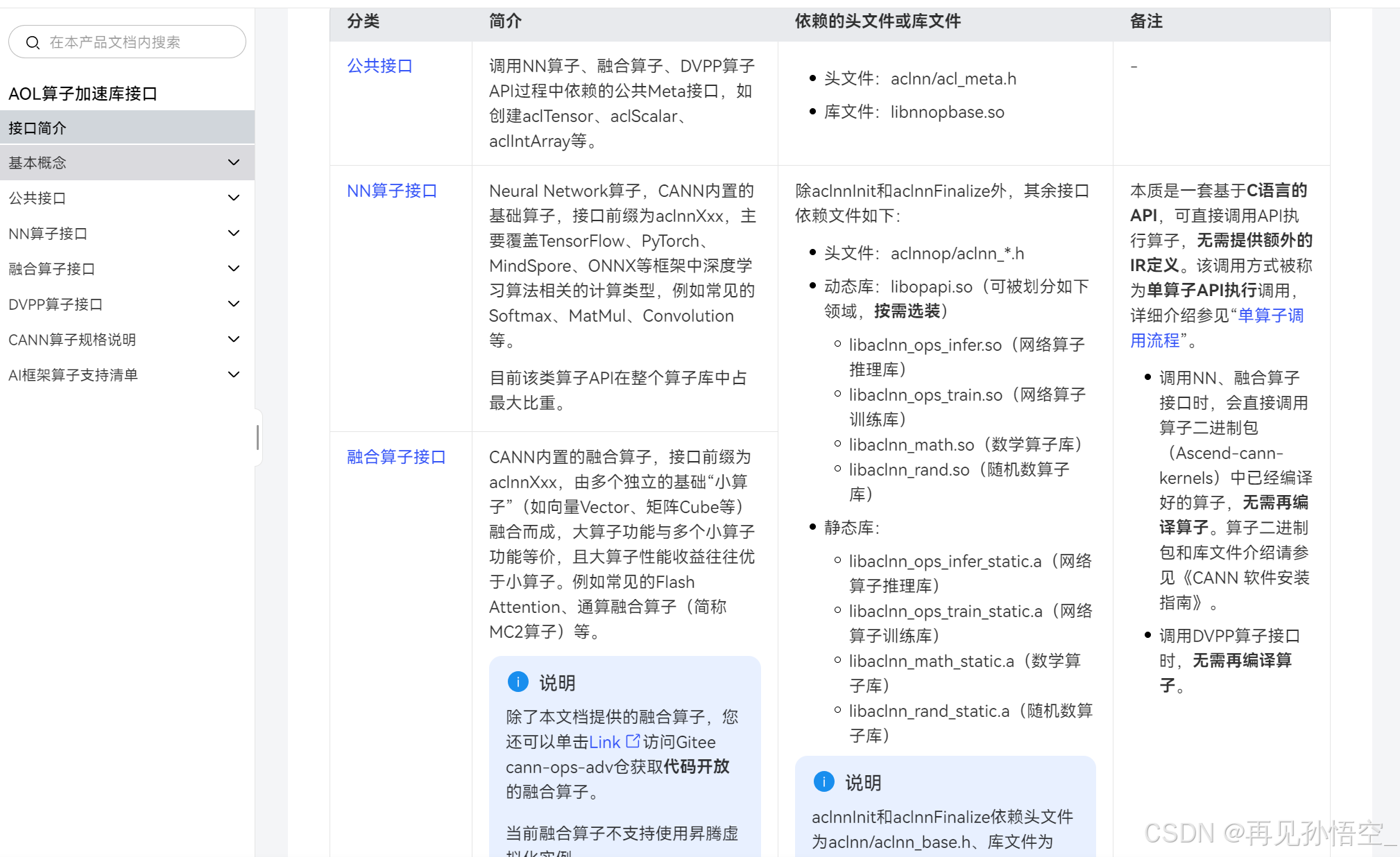
CANN是华为针对AI场景推出的异构计算架构,作为昇腾AI生态的核心软件平台,其主要目标是提升AI开发效率并释放昇腾AI处理器的强大算力。
简单来说,CANN就像是AI应用与硬件之间的一位"超级翻译官"和"高效调度员":
- 它通过统一的端云部署能力,让开发者一次开发就能面向多种设备部署
- 它提供多层次的AscendCL编程接口,支持用户快速构建基于昇腾平台的AI应用和业务
- 它通过软硬件协同优化,充分释放硬件算力,大幅提升AI模型的训练和推理性能
随着AI模型变得越来越复杂,对算力的需求呈指数级增长,CANN这样的优化平台显得尤为重要。它通过一系列技术创新,让开发者能够更轻松地利用昇腾处理器的强大性能,而无需深入了解底层硬件的复杂性。
2 CANN在辅助驾驶中的实战应用
辅助驾驶系统需要对环境进行实时感知和分析,帮助驾驶员预先察觉可能发生的危险,这要求系统具备高效的目标检测和计算能力。传统的解决方案往往面临响应延迟和准确度不高的问题,而基于CANN的解决方案则带来了显著的性能提升。
2.1 项目背景与挑战
一个典型的辅助驾驶AI应用需要实现以下功能:
- 实时车辆检测:准确识别前方道路上的车辆
- 车距计算:估算自车与前车的距离,为驾驶员提供决策支持
- 车道线检测:识别车道线,确保车辆在正确车道内行驶
这些功能需要在保证高精度的同时,满足实时性的要求,这对系统的计算效率提出了极高挑战。
2.2 CANN的解决方案与技术细节
该项目基于CANN构建了一个完整的辅助驾驶应用,采用了YOLOv4目标检测算法,并利用AscendCL编程接口进行实现。
核心代码结构:
该项目采用模块化设计,通过AscendCL接口快速实现基于YOLOv4算法的目标检测应用,其核心流程包括:
# 伪代码示例:基于AscendCL的推理流程
# 1. 运行管理资源申请
acl.init() # 初始化ACL资源
acl.rt.set_device() # 设置计算设备
acl.rt.create_context() # 创建上下文
# 2. 加载模型并构建输出内存
model_path = "yolov4.om"
model_id, load_time = acl.mdl.load_from_file(model_path) # 加载模型
input_size = acl.mdl.get_input_size_by_index(model_id, 0)
output_size = acl.mdl.get_output_size_by_index(model_id, 0)
# 3. 数据预处理
def preprocess_frame(frame):
# 将BGR图像转换为RGB
rgb_frame = cv2.cvtColor(frame, cv2.COLOR_BGR2RGB)
# 调整大小为模型输入尺寸(416x416)
resized = cv2.resize(rgb_frame, (416, 416))
# 归一化处理
normalized = resized / 255.0
# 调整通道顺序 (HWC -> CHW)
chw_frame = normalized.transpose(2, 0, 1)
return chw_frame
# 4. 执行推理
input_data = preprocess_frame(frame)
output_data = acl.mdl.execute(model_id, input_data)
# 5. 后处理
boxes, scores, classes = parse_yolo_output(output_data)
draw_detection_result(frame, boxes, scores, classes)
预处理阶段关键技术:
在预处理阶段,项目采用了一系列优化技术:
- 格式转换:将OpenCV读取的BGR图像转换为RGB格式
- 尺寸调整:通过resize将图像调整为模型需要的416x416尺寸
- 归一化处理:将像素值归一化到0-1范围,消除奇异样本数据的影响
- 通道顺序调整:将图像通道从HWC(高度-宽度-通道)格式转换为CHW格式,以适应模型输入要求
后处理阶段关键技术:
后处理阶段同样关键,它包括:
- 根据推理结果获取检测框坐标和置信度
- 使用NMS(非极大值抑制)消除多余的边框
- 使用透视变换矩阵计算车距
- 用OpenCV检测车道线
- 最终绘制带有车辆检测框、检测框类别、车距和车道线的新图像
2.3 遇到的问题与解决方案
在项目开发过程中,团队遇到了多个技术挑战,CANN提供的功能很好地解决了这些问题:
问题一:模型训练效率低
YOLOv4模型训练需要处理大量数据,传统平台训练时间长,无法快速迭代。
解决方案:利用昇腾AI处理器的强大算力与CANN的软硬件协同优化能力,大幅提升训练效率。具体措施包括:
- 使用CANN将PyTorch框架定义的模型转换为标准化的Ascend IR表达的图格式,屏蔽框架差异
- 利用CANN 5.0的图级和算子级编译优化、自动调优等软硬件深度协同优化技术
- 针对包括检测在内的常用模型训练场景,实现性能翻番
问题二:实时性要求难以满足
辅助驾驶系统要求实时响应,传统的处理流程存在延迟。
解决方案:利用CANN的任务自动流水和算子深度融合技术:
- 任务自动流水:CANN将计算指令和数据载入实现多流水并行,允许对载入数据进行分段,当满足分段数据量时即刻启动后续计算逻辑,充分发挥昇腾AI处理器多流水并行能力
- 算子深度融合:通过多算子自动融合减少计算节点数,有效减少内存拷贝,通过灵活可定制的融合规则让计算图中的算子得以最大程度融合
问题三:边缘设备部署困难
训练好的模型需要部署到边缘设备,但端侧设备算力有限,难以直接运行复杂模型。
解决方案:利用CANN的统一端云部署能力:
# 伪代码示例:端云协同部署
# 云侧开发环境
def cloud_development():
# 在云侧昇腾环境中开发Ascend C自定义算子
operator_dev = AscendCOperator()
# 完成模型微调与量化
model.fine_tune()
model.quantization()
# 借助CANN工具链实现"一步直转"
cann_toolchain.direct_conversion(model)
return compiled_model
# 端侧部署环境
def edge_deployment(compiled_model):
# 算子代码直接复用,高效部署到基于麒麟芯片的端侧设备
model.load(compiled_model)
# 在PC场景中快速落地
result = model.inference(input_data)
return result
这种创新模式大幅降低了端云模型、算子适配工作量,验证了CANN体系的开放性与研发效率。
2.4 实施效果
通过上述方案,基于CANN的辅助驾驶应用取得了显著成效:
- 高性能推理:实现实时车辆检测和车距计算,满足辅助驾驶系统的实时性要求
- 高精度检测:YOLOv4模型在昇腾处理器上保持高精度,准确识别车辆和车道线
- 端云协同:利用CANN统一端云架构,简化了从开发到部署的流程
3 CANN在视频增强中的创新实践
视频增强技术通过AI方法将低分辨率视频重建为高分辨率视频,对历史视频修复和超高清视频制作具有重要意义。然而,视频处理算力需求巨大,需要高效自主可产业化的计算架构支持。
3.1 CANN的解决方案与技术细节
该项目基于昇腾AI基础软硬件平台,从顶层算法到底层算子垂直优化,通过CANN的多算子自动流水技术以及算子融合技术,大大提升了超分辨率算法的执行效率。
先验自适应视频超分辨率技术:
项目采用退化先验的技术,解决了噪声放大、图像纹理杂乱失真的问题;通过语义分割嵌入区域的语义先验,实现内容自适应个性化超分。
关键技术优化:
针对视频增强中的关键算子,团队进行了深度优化:
# 伪代码示例:可变形卷积算子优化
# 优化前的可变形卷积
def deform_conv_naive(input, offset, weight):
# 计算复杂度高,性能低
output = naive_implementation(input, offset, weight)
return output
# 基于CANN优化的可变形卷积
def deform_conv_optimized(input, offset, weight):
# 利用CANN的算子优化能力
# 通过算法重构和硬件指令优化,性能提升9倍
output = cann_optimized_implementation(input, offset, weight)
return output
垂直优化体系:
项目建立了从顶层算法到底层算子的垂直优化体系:
- 顶层算法优化:采用先验自适应视频超分辨率技术,提高视觉效果
- 中层框架优化:利用CANN的图优化和算子融合能力,减少计算节点
- 底层算子优化:针对关键算子(如可变形卷积)进行深度优化,性能提升9倍
3.2 遇到的问题与解决方案
问题一:视频处理计算量大,处理速度慢
传统视频超分辨率技术计算复杂度高,难以满足实际应用需求。
解决方案:利用CANN的计算优化技术和硬件算力:
- 通过多算子自动流水技术,实现计算和数据的并行处理
- 利用算子融合技术,将多个小算子合并为大算子,减少内存搬运开销
- 依托昇腾AI处理器的强大算力,加速计算过程
问题二:历史视频退化类型多样,单一算法效果有限
不同年代、不同类型的历史视频退化特征不同,需要算法具备强大的泛化能力。
解决方案:结合CANN的支持,实现自适应视频增强:
- 采用高阶退化仿真技术,模拟各种退化过程
- 通过复杂运动建模,准确估计视频帧间运动
- 利用场景自适应技术,根据不同内容调整处理策略
- 通过深度感知,提高视频增强的视觉质量
问题三:系统生态封闭,难以自主可控
视频增强技术需要全链条优化,但传统闭源系统难以深度优化。
解决方案:基于昇腾AI基础软硬件平台,构建自主可控生态:
- 使用CANN提供的开放接口,深度优化算法性能
- 利用昇腾AI处理器的算力,实现高效计算
- 建立从算法到算子的全流程自主优化能力
4 CANN在遥感图像处理中的技术突破
遥感图像处理面临着"大幅面、多通道"的处理难题,单样本大小往往达到2-3GB,超大图片计算已成为遥感应用产业发展的"卡脖子"问题。
4.1 项目背景与挑战
武汉大学基于CANN 5.0打造了全球首个遥感专用框架LuojiaNet,旨在解决遥感影像处理中的特殊挑战:
- 图像尺寸大:遥感图像平均可达CHW:43000030000甚至更高
- 显存不足:单张图像2-3GB,远超过一般显存容量
- 特征跨度大:直接切分会导致特征丢失和边缘失真
4.2 CANN的解决方案与技术细节
CANN 5.0依托自动分解和并行技术,将超大模型的处理变得像普通模型一样简单。其关键技术包括:
图片自动切分与分布式部署:
# 伪代码示例:遥感大图处理
def process_large_remote_image(image):
# 充分利用集群优势,自动计算切分策略
split_plans = cann.auto_split_strategy(image, cluster_size)
results = []
for plan in split_plans:
# 部署到各计算节点
node_id = plan.node_id
slice_data = image.slice(plan.area)
# 为当前切片提供上下文信息
overlap_data = calculate_overlap(slice_data, plan.overlap)
# 发送到对应节点处理
result = send_to_node(node_id, slice_data, overlap_data)
results.append(result)
# 收集并合并结果
final_result = merge_results(results)
return final_result
Overlap数据高效交换:
为了解决特征跨度大和边缘失真的问题,系统采用了一系列创新技术:
- 在当前切片的卷积运算前,自动计算出具有相邻切片特征的overlap数据
- 为当前切片提供上下文信息,保证图片精度
- 借助高效的alltoallv算子在相邻节点间收发数据,实现无阻塞通信
智能梯度切分与并行策略:
CANN 5.0通过智能梯度切分算法,自动搜索出最优梯度参数切分方式:
- 为梯度传输选择合适的通信时机和通信量
- 最大限度让计算和通信并行执行
- 将通信拖尾时间降至最低,促使集群训练达到最优性能
4.3 遇到的问题与解决方案
问题一:显存不足,无法加载完整图像
遥感图像单样本2-3GB,远超出现有设备的显存容量。
解决方案:利用CANN 5.0的自动分解技术:
- 根据数据量和集群规模,自动完成图片切分
- 将切分后的子图部署到各计算节点
- 通过overlap区域保持上下文信息
问题二:切分后边缘失真,精度下降
简单切分图像会导致边缘信息丢失,影响特征提取的准确性。
解决方案:采用overlap数据交换策略:
- 自动计算相邻切片特征的overlap数据
- 为当前切片提供充分的上下文信息
- 使用高效的alltoallv算子实现节点间数据交换
问题三:集群训练效率低,通信拖尾严重
在大规模集群训练中,通信延迟成为性能瓶颈。
解决方案:利用自适应梯度切分技术:
- 智能梯度切分算法自动搜索最优切分方式
- 选择合适的通信时机和通信量
- 最大限度让计算和通信并行执行,降低通信拖尾时间
5 CANN技术优势解析
通过以上三个案例,我们可以总结出CANN在AI应用落地中的核心优势:
5.1 软硬件协同优化
CANN通过多层次的软硬件协同优化,充分释放昇腾AI处理器的算力:
- 编译器优化:将不同AI框架的模型转换为标准化中间表示,进行统一优化
- 图级优化:通过算子融合、内存复用等技术,减少计算节点和内存访问
- 算子级优化:针对关键算子深度优化,提升计算效率
5.2 端云协同统一架构
CANN具备统一的端云部署能力,依托昇腾、麒麟NPU硬件共架构,开发者一次开发即可面向端云协同部署:
- 降低开发成本:显著降低模型适配和算子开发成本
- 提升部署效率:提升AI能力在多平台的部署效率
- 简化开发流程:通过"一步直转"工具链,简化从开发到部署的流程
5.3 多层次开放生态
CANN通过多维协同创新构建开发者友好型AI生态:
- 基础层开放:开源算子加速库、通信算法、Ascend C等基础组件
- 应用层共创:与伙伴合作创新开发高性能算子,提升业务场景性能
- 社区共建:通过开发者社区、训练营等方式,培养人才并共享知识
5.4 全流程性能优化
CANN提供全流程的性能优化能力,从计算-内存-通信三个维度重构AI算力基因:
- 计算优化:通过MLAPO融合算子技术,将多个小算子整合为超级大算子
- 内存优化:创新多重地址映射技术,动态切分物理内存适配虚拟地址
- 通信优化:NPUDirect通信算法革新传统RDMA异步通信模式
6 开发实践建议
对于准备使用CANN进行AI应用开发的团队,这里有一些实用建议:
6.1 迁移与开发策略
- 算子与模型兼容性测试:用核心模型和关键算子做完整的端到端测试,记录性能、数值一致性、内存行为
- 性能基线与调优:在同一模型/任务上对比Ascend(CANN) vs NVIDIA(CUDA)的吞吐/延迟/显存/能耗
- 抽象化与中间格式:把模型训练/开发保留在PyTorch/TensorFlow,生产部署通过ONNX + ONNX Runtime的Execution Provider做多后端导出
6.2 故障排查与调试
当遇到性能问题时,可以按照以下顺序进行排查:
- 数据读取阶段:通过Linux资源监测命令(top、mpstat、free、iostat)监测资源情况
- 数据预处理阶段:使用prefetch来调整HOST和DEVICE执行函数的比例
- 训练执行阶段:使用NPU亲和API替换、Profiling工具进行调优
- 训练后处理阶段:减少checkpoint保存频次,注释掉summary数据保存API
6.3 工具链有效利用
- Profiling工具:使用CANN提供的Profiling工具分析性能热点
- 模型转换工具:利用CANN提供的模型转换工具,将训练好的模型转换为om格式
- 调试工具:利用AscendCL提供的错误码和日志功能,快速定位问题
无论你是AI应用开发者、系统架构师还是技术决策者,现在都是深入了解和实践CANN的最佳时机。从一个小项目开始,亲身体验CANN为AI应用开发带来的变革性优势,迎接AI技术带来的无限可能。

有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐

 5
5 0
0- 0



 已为社区贡献4条内容
已为社区贡献4条内容

所有评论(0)