MATLAB代码《基于多智能体系统一致性算法的电力系统分布式经济调度》 软件环境:MATLAB 内容
该模块通过邻接矩阵描述多智能体间的通信拓扑关系,是分布式协同的基础。矩阵维度为29×29(对应10台发电机+19个负荷,共29个智能体),矩阵元素a(i,j)代表智能体i与智能体j的信息交互权重,满足“行和合理”原则(确保信息传递的有效性与一致性收敛)。
MATLAB代码《基于多智能体系统一致性算法的电力系统分布式经济调度》 软件环境:MATLAB 内容:集中式优化方法难以应对未来电网柔性负荷广泛渗透以及电力元件“即插即用”的技术要求。 区别于集中式经济调度,提出一种电力系统分布式经济调度策略。 应用多智能体系统中的一致性算法,以发电机组的增量成本和柔性负荷的增量效益作为一致性变量,设计一种用于电力系统经济调度的算法,通过分布式优化的方式求解经济调度问题。 基于10机19节点负荷系统仿真分析验证了所提调度策略的有效性。 关键词:电力系统,经济调度,分布式优化,多智能体系统,一致性算法 这段程序主要是一个电力系统的优化问题,通过迭代计算来求解最优的发电机出力和负荷功率分配方案。下面我将对程序的功能、应用领域、工作内容、主要思路进行详细解释分析。 该程序主要功能是通过迭代计算,优化电力系统中发电机的出力和负荷的功率分配,以实现系统的最优运行。它可以应用于电力系统调度和能源管理领域,用于解决电力系统中的发电机出力和负荷功率分配问题,以提高系统的效率和稳定性。 程序的主要工作内容包括: 1. 定义电力系统的邻接矩阵,表示发电机和负荷之间的连接关系。 2. 定义发电机和负荷的参数,包括发电机的基准出力、灵敏度和最大最小出力限制,以及负荷的基准功率和灵敏度。 3. 进行迭代计算,更新发电机和负荷的一致性变量值,以及发电机和负荷的出力和功率分配方案。 4. 判断发电机和负荷的出力是否越限,并进行修正。 5. 绘制发电机和负荷的一致性变量值随时间的变化曲线,以及总发电功率和总负荷功率随时间的变化曲线。 程序的主要思路是通过迭代计算,不断更新发电机和负荷的一致性变量值,以及发电机和负荷的出力和功率分配方案,直到达到系统的最优状态。在每一次迭代中,根据当前的一致性变量值和出力分配方案,计算出新的一致性变量值和修正后的出力分配方案,然后再进行下一次迭代,直到达到预定的迭代次数或收敛条件。 程序涉及到的主要知识点包括电力系统的调度和优化、线性代数中的矩阵运算、数值计算方法中的迭代算法等。 总结起来,该程序通过迭代计算,优化电力系统中发电机的出力和负荷的功率分配方案,以实现系统的最优运行。它可以应用于电力系统调度和能源管理领域,解决电力系统中的发电机出力和负荷功率分配问题,提高系统的效率和稳定性。
一、代码整体架构与设计背景
本套代码基于多智能体系统(Multi-Agent System, MAS)一致性算法,针对电力系统分布式经济调度场景开发,包含4个核心MATLAB脚本文件(re_basic.m、changjing2.m、changjing3.m、changjing4.m)。整体设计以“分布式协同优化”为核心,通过智能体间的信息交互与一致性迭代,实现发电功率与负荷功率的动态匹配,同时最小化系统运行成本,满足电力系统“经济”与“可靠”双重调度目标。
设计背景聚焦电力系统分布式调度的核心痛点:传统集中式调度依赖中心节点,存在单点故障风险与通信压力大的问题;而分布式调度通过多智能体协同,将优化任务分散到各节点(发电机、负荷),仅需相邻节点间交互信息,大幅提升系统鲁棒性与扩展性。本代码中,每个发电机与负荷均作为独立智能体,通过邻接矩阵定义交互拓扑,基于一致性算法同步优化目标变量(增量成本/增量效益),最终实现系统功率平衡与经济调度。
二、核心功能模块解析
(一)拓扑结构定义模块
该模块通过邻接矩阵描述多智能体间的通信拓扑关系,是分布式协同的基础。矩阵维度为29×29(对应10台发电机+19个负荷,共29个智能体),矩阵元素a(i,j)代表智能体i与智能体j的信息交互权重,满足“行和合理”原则(确保信息传递的有效性与一致性收敛)。
功能特点
- 拓扑灵活性:不同脚本(如changjing2.m与changjing3.m)通过调整邻接矩阵元素(如0.5、1/3、0.25等权重),模拟不同通信场景(如部分节点通信链路变化);
- 故障模拟支持:changjing4.m中新增“故障后邻接矩阵aa”,通过修改特定元素(如将部分通信权重设为0或-2),模拟第29号负荷(智能体)退出与恢复场景,验证系统容错能力;
- 无中心设计:邻接矩阵无“全局中心节点”,所有智能体仅与相邻节点交互,符合分布式调度的去中心化理念。
(二)设备参数配置模块
该模块为发电机与负荷智能体配置核心运行参数,是经济调度“成本优化”与“功率约束”的基础,参数分为“发电机参数”与“负荷参数”两类,且所有参数在4个脚本中保持基础一致性,仅在特殊场景(如约束调整、故障模拟)下局部修改。
1. 发电机参数配置
| 参数类别 | 变量名 | 功能说明 | 关键特性 |
|---|---|---|---|
| 成本系数 | be(10维) | 发电机运行成本的一次项系数,决定成本基线 | 固定取值,反映不同发电机的基础成本差异 |
| 成本系数 | ga(10维) | 发电机运行成本的二次项系数,决定成本边际变化率 | 正值,确保成本函数为凸函数,存在唯一最小值 |
| 功率参数 | pg(10维) | 发电机初始有功功率 | 基于系统初始功率平衡状态设定 |
| 功率约束 | pgmax/pgmin | 发电机最大/最小输出功率限制 | 基础场景下设为初始功率的±2.5倍,changjing3.m中新增2号发电机最小功率限制(pgmin(2)=100MW),满足实际设备运行安全要求 |
| 目标变量 | li(10维) | 发电机增量成本(成本函数对功率的导数) | 初始值由be与ga计算(li=be+2×ga×pg),是一致性迭代的核心目标变量 |
2. 负荷参数配置
| 参数类别 | 变量名 | 功能说明 | 关键特性 |
|---|---|---|---|
| 效益系数 | b(19维) | 负荷用电效益的一次项系数,反映负荷基础效益 | 固定取值,区分不同负荷的重要性差异 |
| 效益系数 | c(19维) | 负荷用电效益的二次项系数,反映效益边际变化率 | 负值(通过除以-100实现),确保效益函数为凹函数,符合负荷用电效益递减规律 |
| 功率参数 | pd(19维) | 负荷初始有功功率 | 与发电机初始功率匹配,确保系统初始功率平衡 |
| 功率约束 | pdmax/pdmin | 负荷最大/最小用电功率限制 | 基础场景下设为初始功率的±2.5倍,changjing3.m中新增1号负荷最小功率限制(pdmin(1)=50MW),模拟重要负荷的用电保障需求 |
| 目标变量 | lj(19维) | 负荷增量效益(效益函数对功率的导数) | 初始值由b与c计算(lj=b+2×c×pd),与发电机增量成本共同参与一致性迭代 |
(三)一致性迭代优化模块
该模块是代码的核心逻辑,通过多轮迭代实现“发电机增量成本”与“负荷增量效益”的一致性收敛,同时动态调整发电功率与负荷功率,最终达成“功率平衡”与“经济最优”双重目标。迭代流程分为“目标变量更新”“功率越限判断”“功率平衡计算”三步,具体逻辑如下:
1. 目标变量更新(lambda更新)
目标变量lambda(对应代码中ll矩阵)融合发电机增量成本(前10维)与负荷增量效益(后19维),更新规则为:
- 普通智能体(非1号、非11号):仅通过邻接矩阵接收相邻智能体的信息,按权重更新自身目标变量(ll(t+1,n)=sum(a(n,:).*ll(t,:)));
- 特殊智能体(1号、11号):在相邻信息交互基础上,额外引入“功率偏差补偿项”(0.005×dp(t)),加速系统向功率平衡收敛(dp(t)为当前总负荷功率与总发电功率的偏差)。
2. 功率越限判断
根据更新后的目标变量,计算发电机与负荷的理论最优功率,并判断是否超出安全约束,确保设备运行在安全范围内:
- 发电机功率计算:基于“增量成本等于lambda”的经济最优原则,理论功率为(ll(t,i)-be(i))/(2×ga(i));若超出pgmax/pgmin,则取边界值作为实际功率(pgg(t+1,i));
- 负荷功率计算:基于“增量效益等于lambda”的效益最优原则,理论功率为(ll(t,j+10)-b(j))/(2×c(j));若超出pdmax/pdmin,则取边界值作为实际功率(pdd(t+1,j))。
3. 功率平衡计算
每次迭代后,重新计算总发电功率(spd=sum(pgg))与总负荷功率(spg=sum(pdd)),并更新功率偏差(dp(t+1)=spg(t+1)-spd(t+1)),为下一轮迭代的“偏差补偿项”提供输入,形成闭环优化。
(四)结果可视化模块
该模块通过MATLAB绘图函数,直观展示调度过程中的核心指标变化,便于分析系统收敛性与调度效果,输出两类关键图形:
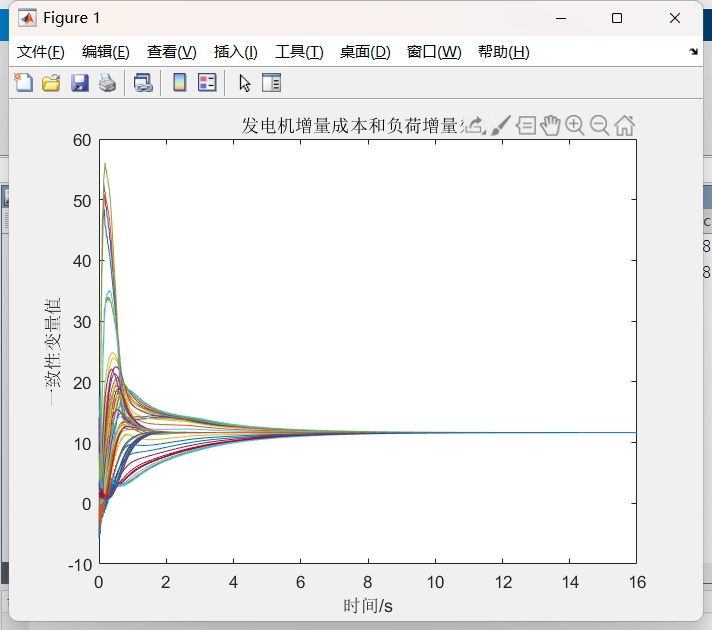
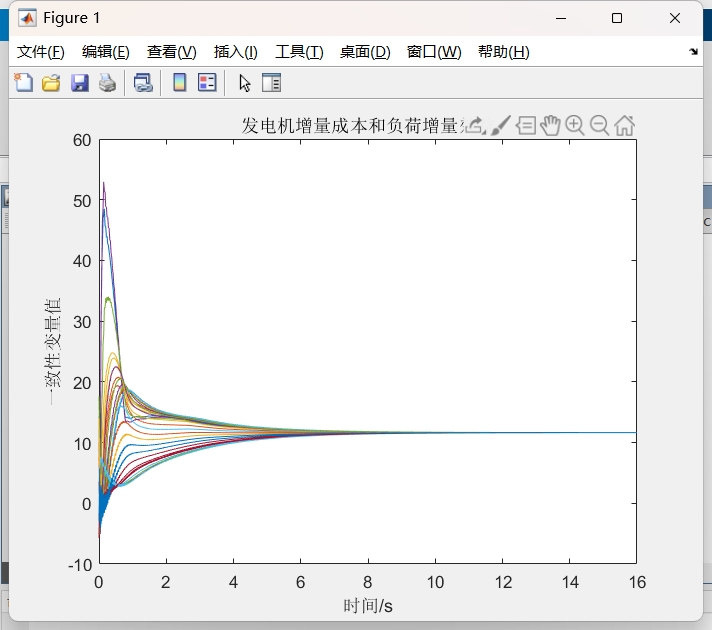
1. 目标变量收敛图(Figure 1)
- 横轴:时间(单位:s),由迭代次数与时间步长(0.02s)计算得出(如300次迭代对应6s);
- 纵轴:一致性变量值(即发电机增量成本与负荷增量效益);
- 功能:展示29个智能体的目标变量随时间的收敛过程,理想状态下所有变量最终趋于一致,表明系统达到经济最优(增量成本=增量效益)。
2. 功率平衡趋势图(Figure 2)
- 横轴:时间(单位:s);
- 纵轴:功率(单位:MW);
- 曲线:两条曲线分别代表总发电功率(ΣPG)与总负荷功率(ΣPD);
- 功能:展示系统功率平衡的动态过程,理想状态下两条曲线最终重合(dp→0),表明系统功率供需平衡。
三、不同脚本的场景差异与功能扩展
4个脚本基于同一核心框架,但通过调整“迭代次数”“约束条件”“拓扑结构”,实现不同调度场景的模拟,具体差异如下:
| 脚本文件 | 核心场景 | 关键调整点 | 功能目标 |
|---|---|---|---|
| re_basic.m | 基础调度场景 | 迭代次数300次(对应6s),无额外功率约束,邻接矩阵为基础拓扑 | 验证分布式经济调度的基础功能,确保在正常场景下实现目标变量收敛与功率平衡 |
| changjing2.m | 长时调度场景 | 迭代次数800次(对应16s),无额外功率约束,邻接矩阵与基础场景一致 | 模拟长时间运行下的系统稳定性,验证目标变量收敛后的保持能力与功率平衡的持续性 |
| changjing3.m | 带设备约束场景 | 迭代次数300次,新增2号发电机最小功率限制(pgmin(2)=100MW)与1号负荷最小功率限制(pdmin(1)=50MW) | 模拟实际电力系统中“重要设备运行约束”,验证算法在约束条件下的优化能力,确保重要设备安全运行 |
| changjing4.m | 故障恢复场景 | 迭代次数1000次(对应20s),分三段迭代: 1. 前300次:基础拓扑,正常运行; 2. 301-600次:切换为故障拓扑(aa矩阵),设29号负荷功率为0(模拟退出); 3. 601-1000次:恢复基础拓扑,29号负荷功率恢复初始值 |
验证系统在“设备故障-恢复”过程中的鲁棒性,模拟负荷退出时的功率重新分配,以及故障恢复后的系统重启能力 |
四、代码核心价值与应用场景
(一)核心价值
- 分布式优化:无需中心节点,仅通过相邻智能体信息交互实现全局优化,降低通信压力与单点故障风险;
- 经济与可靠兼顾:在最小化发电成本的同时,通过功率越限判断确保设备安全,通过故障场景模拟提升系统鲁棒性;
- 灵活可扩展:通过调整邻接矩阵、设备参数、迭代次数,可快速适配不同规模(如更多发电机/负荷)、不同场景(如新能源接入、负荷波动)的调度需求。
(二)应用场景
- 配电网分布式调度:适用于含分布式电源(光伏、风电)与可控负荷的配电网,实现本地功率平衡与经济运行;
- 微电网协同控制:微电网中多台发电机与负荷的协同优化,尤其适合离网微电网的自主调度;
- 电力系统故障恢复:模拟设备退出/恢复场景,为调度人员提供故障处理的算法支持,缩短故障影响时间;
- 调度算法验证:作为分布式经济调度算法的验证平台,可基于此代码扩展新能源预测、不确定性优化等功能。
五、关键性能指标与预期结果
(一)关键性能指标
- 收敛时间:基础场景下(re_basic.m),目标变量应在3-5s内收敛(迭代次数150-250次),功率偏差dp趋于0;
- 功率平衡精度:收敛后,总发电功率与总负荷功率的偏差应小于1MW(相对偏差<0.1%);
- 约束满足率:带约束场景(changjing3.m)中,2号发电机功率始终≥100MW,1号负荷功率始终≥50MW,约束满足率100%;
- 故障恢复能力:changjing4.m中,29号负荷退出后,系统应在2-3s内重新实现功率平衡;恢复后,10s内目标变量与功率平衡恢复至故障前水平。
(二)预期结果示例
- 目标变量收敛图:所有曲线在收敛时间内逐渐重合,最终保持稳定;
- 功率平衡趋势图:总发电功率与总负荷功率曲线在迭代初期存在偏差,随迭代推进逐渐靠近,收敛后基本重合,故障场景下曲线短暂偏离后快速恢复。
六、代码使用建议与扩展方向
(一)使用建议
- 参数调整:根据实际设备参数(如发电机成本系数、负荷效益系数)修改be、ga、b、c变量,确保与实际系统匹配;
- 拓扑设计:根据通信网络拓扑调整邻接矩阵,确保矩阵行和合理(建议行和为1,避免信息传递过程中的增益/衰减);
- 迭代步长:代码中偏差补偿项系数为0.005,若收敛过慢可适当增大(如0.01),若收敛震荡可适当减小(如0.002);
- 结果分析:重点关注目标变量的收敛速度与功率偏差的减小趋势,若出现不收敛,需检查邻接矩阵拓扑(是否连通)与参数设置(是否满足凸/凹函数条件)。
(二)扩展方向
- 新能源接入:新增光伏、风电智能体,引入出力预测误差与随机性优化,提升代码对高比例新能源电力系统的适配能力;
- 多目标优化:在经济成本基础上,增加“环保成本”(如碳排放系数),实现经济-环保双目标优化;
- 实时调度:结合实时通信数据(如PMU量测数据),将代码与实时数据库对接,实现在线分布式调度;
- 多时间尺度优化:区分“日前调度”“日内滚动调度”“实时调度”,调整迭代时间步长与优化目标,满足不同时间尺度的调度需求。

有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐


 29
29 0
0- 0



 已为社区贡献2条内容
已为社区贡献2条内容

所有评论(0)