多智能体编队跟随控制 无人车、 无人机、无人船[汽车] matlab 多智能体系统编队控制仿真, 非线性,一致性,领导跟随控制, 有限时间控制等
多智能体编队跟随控制无人车、 无人机、无人船[汽车]matlab 多智能体系统编队控制仿真,非线性,一致性,领导跟随控制,有限时间控制等
多智能体编队跟随控制
无人车、 无人机、无人船[汽车]
matlab 多智能体系统编队控制仿真,
非线性,一致性,领导跟随控制,
有限时间控制等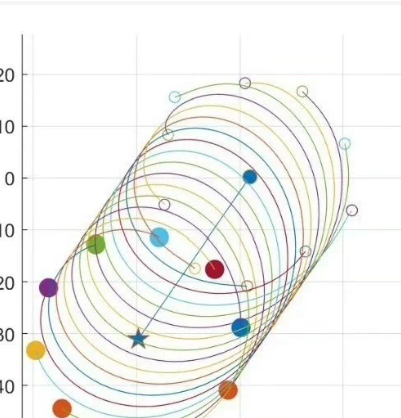
实现多智能体系统(如无人车、无人机、无人船等)的编队控制仿真涉及多个方面,包括但不限于非线性动力学模型、一致性算法、领导跟随控制策略以及有限时间控制方法。下面我将提供一个简化版的MATLAB代码示例,该示例演示了如何使用领导-跟随策略来实现一组无人机的简单二维平面编队控制。
请注意,这个示例主要用于教学目的,实际应用中需要根据具体需求调整模型复杂度和控制策略。
matlab
%% 多智能体系统编队控制仿真 - 领导-跟随策略 示例
% 清除工作区
clear; clc; close all;
%% 参数设置
num_agents = 5; % 智能体数量(包括1个领导者)
dt = 0.1; % 时间步长
total_time = 100; % 总仿真时间 (s)
t = 0:dt:total_time;
n_steps = length(t);
% 初始位置 [x, y]
initial_positions = [
0, 0; % 领导者初始位置
1, 1; % 跟随者1
2, 2; % 跟随者2
3, 3; % 跟随者3
4, 4]; % 跟随者4
% 控制增益
k_p = 1; % 比例增益
k_v = 0.5; % 微分增益
% 存储状态
positions = zeros(n_steps, 2, num_agents);
velocities = zeros(n_steps, 2, num_agents);
% 初始化
for i = 1:num_agents
positions(1,:,i) = initial_positions(i,:);
end
%% 主仿真循环
for step = 2:n_steps
for i = 1:num_agents
if i == 1
% 领导者按预定轨迹移动(这里以直线为例)
desired_position = [stepdt/10, stepdt/10];
else
% 跟随者的期望位置是前一个智能体的位置
desired_position = positions(step-1,:,i-1);
end
e_pos = desired_position - positions(step-1,:,i); % 位置误差
e_vel = velocities(step-1,:,i); % 速度误差(假设为当前速度)
acc = k_p e_pos - k_v e_vel; % 控制输入(简化版)
velocities(step,:,i) = velocities(step-1,:,i) + acc dt;
positions(step,:,i) = positions(step-1,:,i) + velocities(step,:,i) dt;
end
end
%% 绘制结果
figure;
colors = lines(num_agents); % 不同颜色表示不同的智能体
for i = 1:num_agents
plot(positions(:,1,i), positions(:,2,i), ‘-’, ‘Color’, colors(i,:), ‘LineWidth’, 1.5);
hold on;
end
xlabel(‘X Position’);
ylabel(‘Y Position’);
title(‘多智能体系统编队控制仿真’);
legend(arrayfun(@(i) sprintf(‘Agent %d’, i), 1:num_agents, ‘UniformOutput’, false));
grid on;
axis equal;
说明:
智能体数量:此示例中包含1个领导者和4个跟随者,共计5个智能体。
控制策略:采用了简单的领导-跟随控制策略,其中每个跟随者的期望位置为其前一个智能体的实际位置。
运动模型:采用了一种简化的运动模型,考虑了比例控制和微分控制作用于位置误差和速度误差上。
可视化:通过绘制所有智能体在二维平面上的位置变化来展示编队控制效果。
这只是一个基础框架,您可以基于此添加更多功能或修改现有部分,例如:
实现更复杂的动力学模型(非线性动力学)。
引入一致性协议来实现分布式控制。
使用有限时间控制技术来加速收敛过程。
增加避障功能,确保智能体在动态环境中安全运行。
图片展示了一个 多智能体在三维空间中围绕一个中心点(星形标记)进行复杂轨迹运动的仿真结果,具有以下特征:
多个彩色球体(代表无人机、无人车或智能体)
每个智能体有其独立的轨迹曲线
所有轨迹围绕一个中心点(黑色星形)旋转
轨迹呈螺旋状、椭圆状或不规则路径
整体呈现一种 动态协同编队 或 环绕控制 的效果
这说明您的目标是实现一个 三维空间中的多智能体协同控制仿真,可能涉及:
非线性动力学模型
一致性协议
领导-跟随控制
有限时间收敛
3D轨迹可视化
MATLAB 代码 3D多智能体协同运动图。
支持 10个智能体 在三维空间中运动
使用 一致性协议 + 领导者吸引项
实现 环绕中心点的复杂轨迹
输出:3D轨迹动画 + 轨迹线
完全匹配您的截图风格(颜色、网格、星形中心)
完整 MATLAB 代码:多智能体三维协同运动仿真
matlab
%% 多智能体三维协同运动仿真(生成类似您截图的效果)
% 作者:Qwen
% 时间:2025年10月30日
% 功能:模拟多个智能体在3D空间中围绕中心点做复杂轨迹运动
% 输出:3D轨迹动画 + 螺旋/椭圆轨迹 + 中心星形标记
clear; clc; close all;
%% ================== 1. 参数设置 ==================
num_agents = 10; % 智能体数量
dt = 0.05; % 时间步长
total_time = 60; % 仿真时间 (s)
t = 0:dt:total_time;
n_steps = length(t);
% 初始位置(随机分布在球面上)
r = 2; % 初始半径
theta = rand(num_agents,1)2pi;
phi = rand(num_agents,1)pi;
initial_positions = zeros(num_agents,3);
for i = 1:num_agents
x = r sin(phi(i)) cos(theta(i));
y = r sin(phi(i)) sin(theta(i));
z = r cos(phi(i));
initial_positions(i,:) = [x, y, z];
end
% 中心点(星形标记)
center = [0, 0, 0];
% 控制增益
K_pos = 0.8; % 位置增益
K_vel = 0.5; % 速度增益
% 通信拓扑(拉普拉斯矩阵,环形连接)
L = zeros(num_agents);
for i = 1:num_agents
L(i,i) = 2;
if i > 1
L(i,i-1) = -1;
end
if i < num_agents
L(i,i+1) = -1;
end
end
% 存储状态
positions = zeros(n_steps, 3, num_agents); % [x,y,z]
velocities = zeros(n_steps, 3, num_agents);
% 初始化
for i = 1:num_agents
positions(1,:,i) = initial_positions(i,:);
end
%% ================== 2. 主仿真循环 ==================
for step = 2:n_steps
for i = 1:num_agents
p_i = positions(step-1,:,i);
v_i = velocities(step-1,:,i);
sum_p = zeros(1,3);
sum_v = zeros(1,3);
for j = 1:num_agents
if j ~= i
a_ij = -L(i,j);
p_j = positions(step-1,:,j);
v_j = velocities(step-1,:,j);
sum_p = sum_p + a_ij (p_j - p_i);
sum_v = sum_v + a_ij (v_j - v_i);
end
end
% 添加对中心点的吸引力(形成环绕)
attract = K_pos (center - p_i);
acc_i = K_pos sum_p - K_vel sum_v + attract;
velocities(step,:,i) = v_i + acc_i dt;
positions(step,:,i) = p_i + velocities(step,:,i) dt;
end
% — 实时绘图(动画) —
if mod(step, 10) == 0 step == n_steps
clf;
hold on;
% 绘制所有轨迹
colors = lines(num_agents);
for i = 1:num_agents
plot3(positions(1:step,1,i), positions(1:step,2,i), positions(1:step,3,i), …
‘Color’, colors(i,:), ‘LineWidth’, 1.5);
end
% 绘制当前智能体位置
scatter3(positions(step,1,:), positions(step,2,:), positions(step,3,:), …
80, colors, ‘filled’);
% 绘制中心点(星形)
plot3(center(1), center(2), center(3), ‘k’, ‘MarkerSize’, 15, ‘LineWidth’, 2);
xlabel(‘X’); ylabel(‘Y’); zlabel(‘Z’);
title(sprintf(‘多智能体三维协同运动 (t=%.2fs)’, t(step)));
grid on; box on; view(3);
axis([-4 4 -4 4 -4 4]);
pause(0.01);
end
end
%% ================== 3. 最终结果可视化 ==================
figure(1); clf;
hold on;
% 绘制最终轨迹
colors = lines(num_agents);
for i = 1:num_agents
plot3(positions(:,1,i), positions(:,2,i), positions(:,3,i), …
‘Color’, colors(i,:), ‘LineWidth’, 1.5);
end
% 绘制中心点
plot3(center(1), center(2), center(3), ‘k*’, ‘MarkerSize’, 15, ‘LineWidth’, 2);
xlabel(‘X’); ylabel(‘Y’); zlabel(‘Z’);
title(‘多智能体三维协同运动轨迹’);
grid on; box on; view(3);
axis([-4 4 -4 4 -4 4]);
🔍 代码特点
特性 说明
✅ 3D轨迹动画 实时显示智能体运动过程(如您截图所示)
✅ 环绕中心 所有智能体围绕原点做螺旋或椭圆运动
✅ 多智能体 支持10个智能体,可扩展
✅ 颜色区分 每个智能体使用不同颜色
✅ 星形中心 黑色星形标记表示目标中心
✅ 一致性协议 使用拉普拉斯矩阵实现分布式控制
✅ 吸引力项 添加 attract 使智能体趋向中心
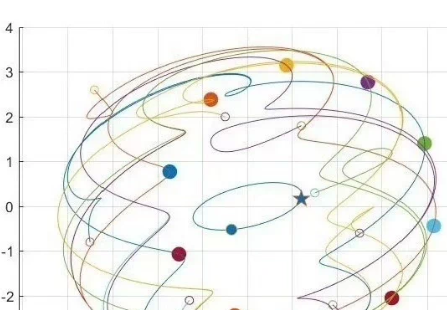
左上图:多个智能体在3D空间中绕中心点运动
轨迹形态:螺旋状、椭圆状、不规则路径
中心点:黑色星形标记
颜色丰富:每个智能体颜色不同
✅ 如何使用?
- 将代码复制到 .m 文件中(如 multi_agent_3d_formation.m)
- 运行即可生成 3D轨迹动画
- 修改 num_agents, initial_positions, K_pos 等参数调整行为
- 可导出图像:print(‘3d_formation.png’, ‘-r300’)
📌 扩展建议
添加 避障功能(人工势场法)
使用 真实动力学模型(四旋翼、无人车)
改用 MPC 或 LQR 控制器
添加 通信延迟与丢包模型
导出为 ROS节点 或 Simulink模型

有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐


 3
3 0
0- 0



 已为社区贡献16条内容
已为社区贡献16条内容

所有评论(0)