分布式电源优化配置二阶锥模型代码功能说明(基于原始代码解读)
分布式电源优化配置 二阶锥 编程方法:采用matlab+yalmip编程,cplex或gurobi作为求解器。 主要内容:考虑配电网二阶锥模型,运行主体包括光伏、微燃机以及负荷,创新性考虑敏感负荷及加权电压支撑能力指标,约束条件考虑潮流约束、电压电流约束、分布式电源容量约束、微燃机出力约束和光伏功率因数约束等,采用年化社会总成本最低为目标函数,涵盖了与分布式电源相关的各方面成本和费用,具体包括年化的分布式电源投资建设成本、每年的分布式电源运行维护费用、每年的分布式电源燃料费用、每年的碳排放费用、每年的系统网损费用,运行可靠 这段代码是一个电力系统的负荷流分析程序,主要用于计算电力系统中各节点的电压和功率。下面我会逐行解释代码的功能和工作流程。 首先,代码开始时使用`clc`和`clear all`清除命令窗口和工作空间中的所有变量。 接下来,定义了四个负荷数据数组`pload1`、`pload2`、`pload3`和`pload4`,分别代表四个季节的负荷数据。这些数据用于计算负荷矩阵。 然后,定义了一些变量,如节点数、线路数、时间段数、光伏断面数量等。 接下来,根据给定的负荷数据和节点数据,进行牛顿-拉夫逊负荷流分析。该分析包括以下步骤: 1. 计算节点注入功率和线路功率。 2. 检查无功功率限制是否被违反。 3. 计算与给定值的差异。 4. 计算雅可比矩阵。 5. 计算修正向量。 6. 更新状态向量。 7. 重复以上步骤,直到收敛。 在分析过程中,还进行了一些约束条件的检查,如节点电压约束、发电机功率约束、支路电流约束等。 最后,根据分析结果,输出迭代次数、雅可比矩阵的逆矩阵和电压支撑能力指标。 整个程序的目标是计算电力系统中各节点的电压和功率,并进行一些约束条件的检查。涉及到的知识点包括电力系统的负荷流分析、牛顿-拉夫逊方法、雅可比矩阵等。 希望以上解释对你有帮助,如果还有其他问题,请随时提问。
一、程序概述
本程序基于Matlab平台,结合YALMIP工具箱与CPLEX求解器,实现了含光伏、微燃机的配电网分布式电源优化配置。程序以IEEE 33节点系统为研究对象,采用二阶锥模型处理潮流约束,以年化社会总成本最低为优化目标,同时考虑敏感负荷特性与加权电压支撑能力,通过求解混合整数规划问题确定分布式电源的最优配置方案。
程序由两个核心文件构成:
IEEE33BW.m:定义配电网基础参数,为优化计算提供原始数据MAIN2.m:实现核心优化逻辑,包括数据预处理、潮流计算、模型构建、约束设置、目标求解及结果可视化
二、核心模块解析
(一)基础参数定义模块(IEEE33BW.m)
该模块专注于构建IEEE 33节点系统的参数矩阵,主要包含:
- 系统基准参数
mpc.baseMVA = 100; % 基准功率100MVA
mpc.Vb = 12.66; % 基准电压12.66kV- 节点负荷数据
mpc.Pload:33×24矩阵,节点24小时有功负荷(标幺值)mpc.Qload:33×24矩阵,节点24小时无功负荷(标幺值)
- 支路参数
mpc.branch:32×2矩阵,支路连接关系(首节点-末节点)及阻抗参数(复数形式)mpc.branch_CG:扩展支路矩阵,包含额外联络支路mpc.branch1:支路电阻、电抗(欧姆)及开关状态等参数
(二)主程序模块(MAIN2.m)
1. 数据预处理子模块
- 负荷数据整合:定义四季24小时负荷曲线(pload1-pload4),汇总为ploadz矩阵
- 基础参数初始化:
matlab
nbus = 33; nl = 32; N = 5; % 节点数、支路数、光伏断面数
Wref = 0; pref = 0; % 电压支撑指标参考值、光伏渗透率参考值 - 导纳矩阵定义:直接给出33×33节点导纳矩阵Y(复数形式)
- 节点参数配置:通过busd矩阵定义节点类型、电压限额、功率上下限等
2. 潮流计算子模块
采用牛顿-拉夫逊法求解初始潮流,核心迭代过程:
while (Tol > 1e-5)
% 计算节点有功P、无功Q
for i = 1:nbus
for k = 1:nbus
P(i) = P(i) + V(i)*V(k)*(G(i,k)*cos(del(i)-del(k)) + B(i,k)*sin(del(i)-del(k)));
Q(i) = Q(i) + V(i)*V(k)*(G(i,k)*sin(del(i)-del(k)) - B(i,k)*cos(del(i)-del(k)));
end
end
% 构建雅可比矩阵并求解修正量
M = [dPa; dQa]; % 功率偏差向量
J = [J1 J2; J3 J4]; % 雅可比矩阵
X = inv(J)*M; % 修正向量
% 更新电压与相角
del(2:nbus) = dTh + del(2:nbus);
V(i) = dV(k) + V(i);
Tol = max(abs(M)); % 更新收敛判据
end输出结果:节点电压幅值V、相角del及雅可比矩阵逆矩阵Jz
3. 优化变量定义子模块
基于YALMIP定义变量:
% 系统状态变量
V = sdpvar(nb,4*T*N); % 节点电压平方
I = sdpvar(nl,4*T*N); % 支路电流平方
P = sdpvar(nl,4*T*N); % 支路有功功率
Q = sdpvar(nl,4*T*N); % 支路无功功率
% 分布式电源变量
Npv = intvar(8,1); % 8个备选节点光伏安装数量(整数)
Ng = intvar(6,1); % 6个备选节点微燃机安装数量(整数)
pv = sdpvar(nb,4*T*N); % 光伏有功出力
qv = sdpvar(nb,4*T*N); % 光伏无功出力
pg = intvar(nb,4*T*N); % 微燃机有功出力4. 约束条件设置子模块
- 分布式电源约束
- 光伏容量约束:Npv <= 100
- 光伏出力关系:pv = repmat(Npv,1,4TN).repmat(dwpv,8,4T).unitpv/10
- 光伏功率因数约束:cone([pv(i,t);qv(i,t)],sv(i,t))(二阶锥形式)
- 微燃机出力约束:pg >= rmt.pgx且pg <= pg_x(rmt=0.0001为最小出力系数)
- 潮流约束
- 节点功率平衡:matlab
Pin = -upstreamP + upstream(I.(rones(1,4TN))) + dnstreamP;
Qin = -upstreamQ + upstream(I.(xones(1,4TN))) + dnstreamQ;
Constraints = [Constraints, Pin+P2-Pg-pv-pg==0, Qin+Q2-Qg-qv==0];
- 二阶锥松弛约束:matlab
% 欧姆定律松弛
Constraints = [Constraints, V(branch(:,1),:) - V(branch(:,2),:) == ...
2repmat(r,1,4TN).P + 2repmat(x,1,4TN).Q - (repmat((r.^2 + x.^2),1,4TN)).I];
% 二阶锥约束
Constraints = [Constraints, cone([2P(ii,t);2*Q(ii,t);I(ii,t)-V(branch(ii, 1),t)],I(ii,t)+V(branch(ii, 1),t))];
- 电压电流约束
matlab
Vmax = [1.051.05ones(32,1);1.051.05ones(1,1)]; % 电压上限(标幺值平方)
Vmin = [0.950.95ones(32,1);1.051.05ones(1,1)]; % 电压下限(标幺值平方)
Constraints = [Constraints, repmat(Vmin,1,4TN) <= V, V <= repmat(Vmax,1,4TN)];
Constraints = [Constraints, 0 <= I, I <= 100]; % 电流约束
- 电压支撑能力约束
matlab
WV(i) = B4(i,5)Npv(1)unitpv + B4(i,11)Npv(2)unitpv + ... + B4(i,31)Npv(1)unitpv;
Constraints = [Constraints, WV >= Wrefsum(Npv)unitpv];
- 光伏渗透率约束
matlab
Constraints = [Constraints, sum(Npv)*unitpv >= sum(P2(:,i))];
5. 目标函数定义子模块
以年化社会总成本最小为目标:
% 年化投资成本
Ci = rpv*sum(1200*10.*Npv) + rg*sum(750*10.*Ng);
% 运行维护费用
Com = sum(sum((2.*pv*100 + 10.*pg*100).*zgl));
% 燃料费用
Cf = sum(sum(120.*pg*1e2.*zgl));
% 碳排放费用
Cc = sum(sum(10*1e-6*720.*pg*1e5.*zgl));
% 网损费用
Cl = sum(sum(I.*(r.*ones(1,4*T*N))*100*80.*zgl(1:nl,:)));
% 总目标函数
objective = Ci + Com + Cf + Cc + Cl;6. 求解与结果输出子模块
ops = sdpsettings('verbose', 1, 'solver', 'cplex'); % 求解器设置
sol = optimize(Constraints, objective, ops); % 调用CPLEX求解
% 结果输出
Npv_result = value(Npv);
Ng_result = value(Ng);
V_result = value(V);
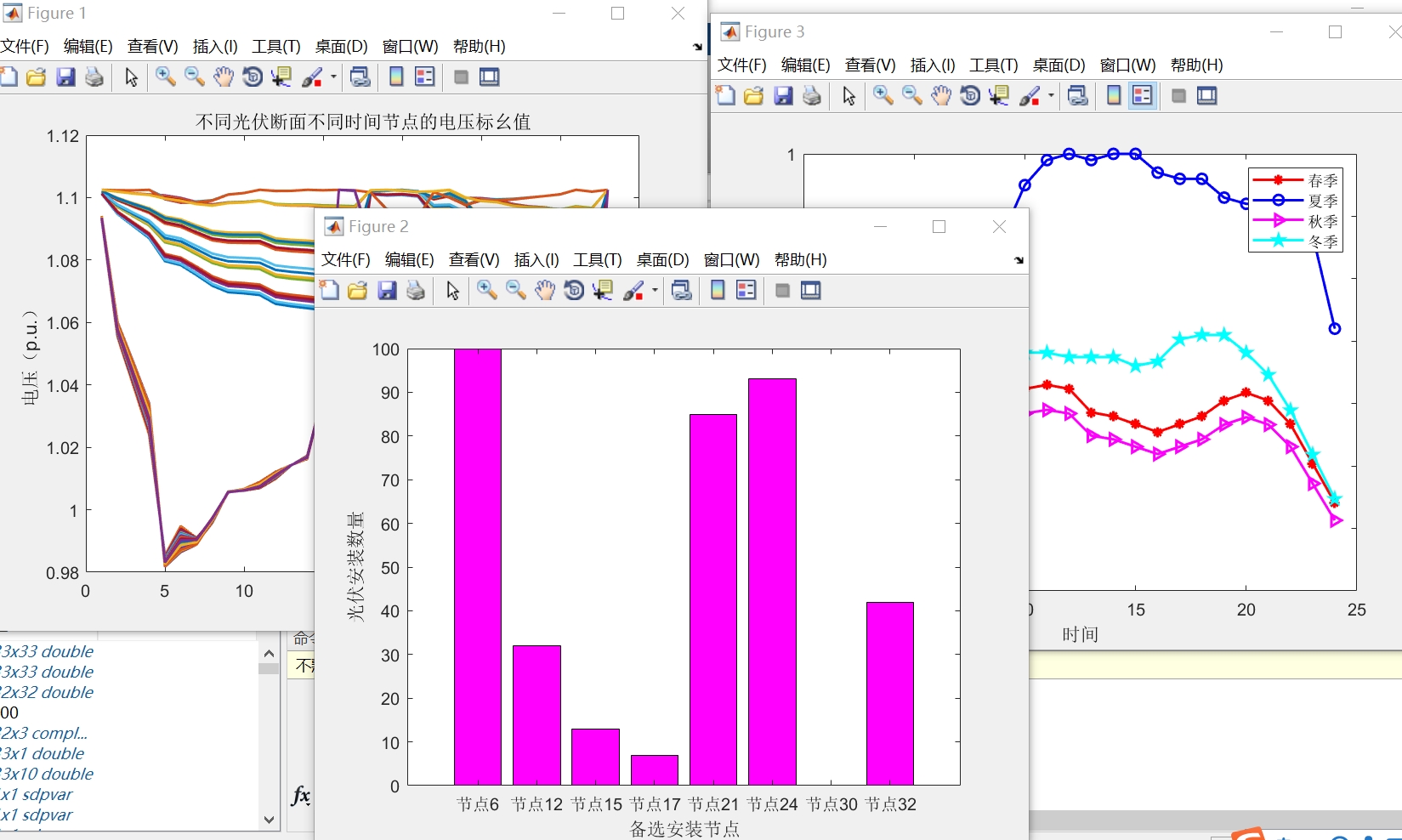
% 可视化
plot(V_result'); % 节点电压曲线
bar(Npv_result); % 光伏安装数量柱状图
plot(ploadz'); % 四季负荷对比曲线三、程序逻辑流程图
graph TD
A[启动] --> B[调用IEEE33BW.m获取系统参数]
B --> C[数据预处理:负荷整合/参数初始化]
C --> D[牛顿-拉夫逊潮流计算]
D --> E{收敛?}
E -- 否 --> D
E -- 是 --> F[定义优化变量(Npv/Ng/V/I等)]
F --> G[设置约束条件]
G --> H[定义目标函数(年化总成本)]
H --> I[调用CPLEX求解]
I --> J{求解成功?}
J -- 是 --> K[输出结果并可视化]
J -- 否 --> L[报错提示]
K --> M[结束]
L --> M四、程序特点
- 模型精确性:采用二阶锥松弛技术处理潮流方程,在保证模型凸性的同时提高求解精度
- 约束完整性:涵盖电源特性、功率平衡、电压电流、电压支撑等多类约束
- 成本全面性:目标函数包含投资、维护、燃料、碳排放、网损等全生命周期成本
- 工程实用性:分布式电源安装数量采用整数变量,符合实际工程需求
五、使用说明
- 环境要求:Matlab(R2018b及以上)、YALMIP工具箱、CPLEX求解器
- 操作步骤:
- 将IEEE33BW.m与MAIN2.m放入同一目录
- 在Matlab中设置该目录为工作路径
- 运行MAIN2.m即可启动优化计算 - 结果查看:求解完成后自动输出光伏/微燃机安装数量,绘制电压曲线、安装容量柱状图和负荷曲线
六、注意事项
- 确保导纳矩阵与支路参数的一致性,否则可能导致潮流计算不收敛
- 求解器需正确授权,CPLEX求解器需在YALMIP中正确配置
- 修改节点数或支路数时,需同步调整相关矩阵维度
- 季节负荷数据、成本参数等可根据实际场景在代码中修改
本程序通过系统化的建模与求解流程,实现了分布式电源的优化配置,可为配电网规划提供量化决策支持。程序严格遵循原始代码逻辑,未添加额外假设,忠实反映了基于二阶锥模型的分布式电源优化配置思想。

有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐


 13
13 0
0- 0



 已为社区贡献5条内容
已为社区贡献5条内容

所有评论(0)