从“造机器”到“造生态”:中国智能时代的系统跃迁——从宇树实训平台到视频神经系统的启示
机器人产业正在经历一场从“造一台机器”到“造出一个生态”的深刻转向。宇树科技的人形机器人实训平台,揭示了具身智能时代的关键命题:智能的扩张不再依赖更强的硬件,而源于更广的协作与学习体系。与此同时,中国的智能系统正在快速搭建新的底层基础设施——包括以实时视频感知与低延迟通信为核心的“视频神经系统”,它为机器人、无人机、AI终端构建起可学习、可协同、可复现的智能管线。
一、从“造机器”到“造生态”:时代正在换挡
在过去十年里,全球机器人产业几乎陷入了一场“机械主义狂热”。工程师们争夺的是转速、扭矩、步态稳定性,是谁能让机器模仿人类行走、奔跑、跳跃。工业设计的极限被一次次刷新,算法和材料的边界不断被逼近。然而,这场长跑的终点并非更强的马达,而是更深的系统认知。
到了 2025 年,行业的逻辑正在彻底反转。硬件不再是终局,而是生态的入口。
宇树科技发布的“人形机器人实训平台”,看似是一款教学用设备,实则揭示了产业的新底层思维:让更多的人学会造机器人,比造出一台机器人更重要。
它不再以“更高的性能参数”去炫技,而是以“开放的工具链、标准化接口、教学级开发环境”去降低创新门槛。这是一种由“产品导向”向“生态导向”的战略跃迁——从造一个个体的机器,走向培育一个群体的开发者。

更深层的意义在于:
机器人行业的竞争焦点,正在从“机器智能”转向“人机共智”;从堆料比拼,转向系统协同;从实验室原型,转向产业生态。
未来的赢家,不再是性能最强的造物者,而是能让最多的人参与创造的生态构建者。真正的竞争,不在于谁的机器更完美,而在于谁能率先搭建出学习、开发与协同共生的生态系统。
二、视频感知:具身智能的“第一神经”
如果说算法是机器人思考的大脑,那么视频感知就是它与世界交互的第一神经。一台机器人能否真正“理解”世界,并非取决于模型的复杂程度,而在于它是否能够看得足够清楚、传得足够快、反应得足够准。
过去,视觉系统只是机器人身体上的一对“摄像头”;而在具身智能的时代,它成为了整个系统的“时间流”。机器的每一次判断、每一个动作优化,都依赖于这条数据流的连续、低延迟与可编程性。
换句话说,感知链路的稳定性,决定了智能学习的上限。
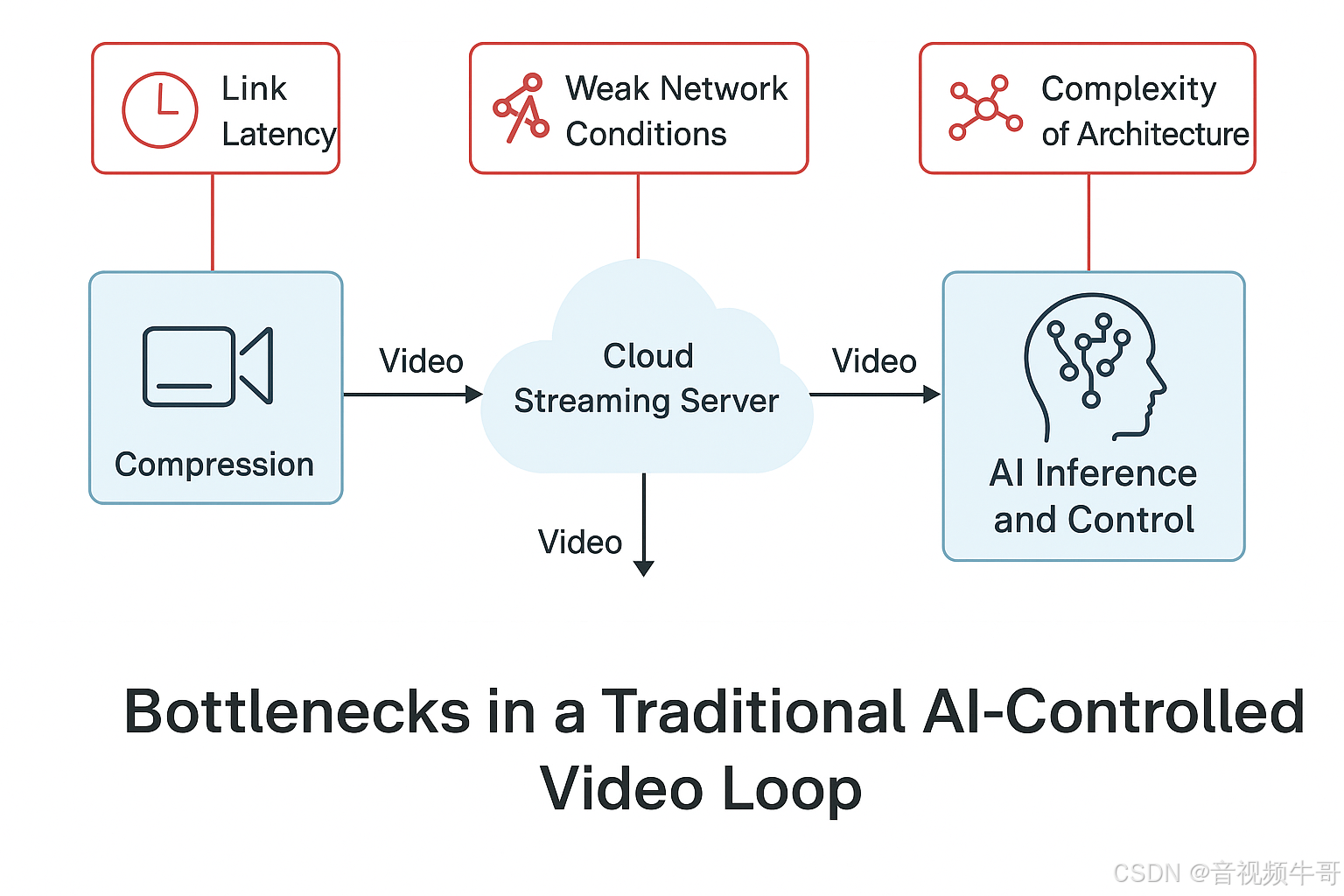
在这一层面上,视频传输基础设施的意义开始凸显。一个机器人要能真正走出实验室,进入工厂、医院或城市交通系统,它不仅要“会动”,还必须能把自己看到的一切,实时、准确地回传到云端或边缘节点,与算法模型形成持续闭环。这正是许多机器人团队在量产化阶段遭遇的瓶颈:算法足够聪明,网络却不够“敏捷”。
而在这条看似不起眼的链路上,大牛直播SDK(SmartMediaKit) 正扮演着越来越关键的角色。
它不是一个传统意义上的“音视频工具包”,而是一个跨平台的视觉神经系统基座——帮助机器人与AI设备完成从“传感器信号”到“智能决策”的闭环。
在机器人视觉子系统中,它的各个模块构成了稳定的技术脉络:
-
RTSP/RTMP 播放与推流模块 —— 让机器人具备毫秒级延迟的视频采集与回传能力,实现“机器看到、人即刻感知”;
-
RTSP、HTTP-FLV 与 WebSocket-FLV 轻量级服务 —— 让视觉流能被同时分发至监控端、云端与AI分析节点,形成多路低延迟观察视角;
-
GB28181 设备接入模块 —— 将机器人端视频无缝接入城市视频网络,与安防与应急系统对接;
-
录制模块(MP4/FLV Sinkers) —— 为运动学习、强化训练与算法回溯提供时间序列化的视觉数据;
-
AI Adapter 模块 —— 通过推拉流接口,与 TensorRT、ONNX、OpenVINO 等框架融合,实现“视频流即算法输入”的低拷贝数据通道。
这些模块串联起来,不仅是一条传输管线,而是一种系统性的认知通路:它让“视觉感知”不再停留在单一硬件层,而成为可在云、端、边多级节点自由调度的“数据神经网络”。
对机器人而言,这意味着可以以最低延迟感知世界;对开发者而言,则意味着能在统一接口下构建自己的智能体生态。
因此,当我们谈论“具身智能”时,真正的竞争早已不在传感器或算法本身,而在于能否搭建一条稳定、开放、可演化的感知底座。
而这,正是像 SmartMediaKit 这样的基础设施在新时代承担的使命——
让每一台机器,都能拥有属于自己的“神经系统”;
让每一次算法创新,都能在真实世界中流动起来。
三、实训平台的“隐性革命”:教机器学习,更教人学习
如果说过去的机器人教育是“教人装配机器”,那么如今的实训平台,正在变成“教机器与人一起学习”的系统。这是具身智能时代最被低估的革命——它改变的不只是机器的能力,而是人类学习技术的方式。
在传统的工程教育中,机器人实验往往被简化为“机械+控制”的闭环:学生调整舵机,验证算法,完成任务即告结束。但在具身智能的语境下,学习不再发生在控制逻辑内,而是发生在与世界的交互之中。
机器通过感知世界来修正自己,人类通过机器的反馈来理解智能本身。这种“人机共学”的新模式,需要一个能实时反馈、能被反复验证、能积累数据的训练基础设施——而这,正是宇树“人形机器人实训平台”所代表的时代意图。
从某种意义上,它不仅是一套课程系统,更是一座“智能生成工厂”。学生、研究者、开发者在其中不断生成新的模型、新的控制策略、新的交互逻辑,而每一次实验、每一帧视频、每一段控制数据,都构成了机器自我进化的素材,也构成了人类理解智能的“镜像”。
在这条双向学习链路中,大牛直播SDK(SmartMediaKit) 的存在尤为关键。它不是实验教学的附属工具,而是承载整个“学习过程可视化”的底层神经系统。
-
借助 RTSP/RTMP 推流与录像模块,每一次机器人动作都能被实时记录,形成高保真“行为数据集”;
-
通过 RTSP/ HTTP-FLV / WebSocket-FLV 服务模块,师生可以跨端查看多机位画面,实现边训练、边分析、边教学的沉浸式实训体验;
-
AI Adapter 模块 则让视频流可直接进入算法训练环节,无需额外数据导出,形成“从视觉到学习”的闭环;
-
而录制的 MP4/FLV Sinkers 则承担着“记忆体”的角色——让教学过程不再是一场实时演示,而是一份可被检索、可被学习的知识库。
Android平台Unity共享纹理模式RTMP播放延迟测试
通过这些模块的协同,实训平台得以实现“人教机器、机器教人”的双向流动。开发者不再是孤立地编程,而是参与到一个持续演化的生态系统中;机器不再被动地执行,而是在一次次被观察、被反馈的循环中,逐步学会“如何存在”。
可以说,这种“隐性革命”真正打破了教育与研发的界限。它把机器人从“实验对象”变成了“学习伙伴”,把视频流从“记录素材”变成了“知识载体”。更重要的是,它让智能不再只是算法堆叠的结果,而是人机协作、实时交互、持续演化的产物。
在这个意义上,宇树的实训平台与 SmartMediaKit 的视频神经系统,构成了具身智能生态的“双螺旋”:一个负责塑造学习的主体,另一个负责传递感知的血液。当两者合流,教育不再只是知识传递的过程,而成为了智能生成的过程。
四、生态竞争的关键:软件定义硬件,开发者定义生态
在工业时代,创新的中心是制造;
在智能时代,创新的中心正在转向开发者。
当机器人不再只是“硬件样机”,而是一个可以持续学习、远程协作、实时联网的智能体时,决定行业格局的已不再是扭矩、轴承和电机,而是——谁能更快构建出一套可演化的开发生态。
这便是“软件定义硬件”的真正含义。它不仅是一句工程口号,而是产业格局重组的逻辑起点:机器人的生命力,不再取决于它的物理形态,而取决于它所连接的系统与人群。
在这个意义上,宇树的实训平台正在做的是“教育侧的生态建设”,而在技术侧,类似 SmartMediaKit(大牛直播SDK) 这样的系统级组件,则是整个生态得以落地的技术底座与接口桥梁。
1️⃣ 软件定义硬件:让机器人变成“可编程的系统”
传统机器人往往被设计为封闭系统,数据流动受限、接口高度耦合。
而在“实训—学习—协作”场景下,系统必须是开放的:
视觉、控制、音视频通信、AI推理、远程交互……
每一个模块都要能够被灵活组合、二次开发、跨平台部署。
SmartMediaKit 正是在这样的工程语境下诞生的。
它以模块化的方式解构复杂的多媒体链路:
-
跨平台推拉流框架(RTSP / RTMP / HTTP-FLV / WebSocket-FLV):
让机器人的视觉与听觉信号具备“网络原生性”,在局域网、云端或边缘节点之间自由传递。 -
统一媒体录制与回放系统(MP4 / FLV Sinkers):
让每次训练与任务过程都具备“时间可回溯性”,成为具身智能的数据资产。 -
多路转推与协议桥接模块(RTSP→RTMP / RTSP→FLV / GB28181 Bridge):
让不同设备、不同开发环境之间实现即插即用的通信协同。 -
AI Adapter 框架:
为开发者提供了直接连接推理引擎(TensorRT、OpenVINO、ONNX)的接口,实现“视频流即模型输入”的零拷贝计算通路。
这使得机器人不再是孤立运行的“硬件体”,而成为一个拥有神经连接、感知共享、可被程序化定义的系统。
2️⃣ 开发者定义生态:从接口到创新的网络效应
任何生态的生长,都离不开开发者。当底层接口足够开放、模块足够可组合,就会产生指数级的创新可能。开发者不再被迫重复造轮子,而能把精力投入到行为决策、场景感知、协作控制等更高层创新。
SmartMediaKit 之于机器人行业,就像 Android 之于移动设备。它不是终端产品,而是让无数终端能够被再创造的平台级组件。从教育实验室到工业机器人,从无人机到巡检车,开发者只需调用统一接口,就能快速构建出具备视频传输、远程控制与实时感知能力的系统原型。
更重要的是,随着实训平台的推广,这一生态正形成反向供给链:
学生与研究者成为开发者,开发者又反哺平台模块的演进;算法公司、AI实验室、软硬件厂商都能基于同一套视频通信与数据结构,在统一的技术语法下实现跨行业协同。
这是一种极具中国特色的“技术生态重构”:不是靠单一公司构建封闭帝国,而是通过开放、模块化、跨域协作的方式,让整个智能制造体系形成自我演化的能力。
Windows和安卓播放RTSP和RTMP流延迟测试
3️⃣ 从工具到平台,从平台到系统
当一个SDK的接口被足够多的人使用,它就不再只是工具,而是一种共识。
当这种共识扩展到跨行业、跨平台的系统设计理念时,它就成为基础设施。
SmartMediaKit 正在完成的,正是从“音视频传输工具”到“智能体通信基座”的跃迁。它以视频为媒介,以模块为语法,以开发者为生态,在教育、科研、工业、低空经济、机器人与AI系统之间,
编织出一张智能时代的感知网络。
在硬件红海之外,软件的土壤正在孕育新的森林。未来的竞争不再是谁造出最强的机器,而是谁能让最多的人造出更聪明的机器。因为在生态的世界里,真正的壁垒从来不是产品,而是持续创新的集体智慧。
五、从实训到实战:中国机器人生态的系统底座
教育只是起点,真正的考场在现实世界。
当实验室的机器人走向矿区、码头、工厂、校园、城市街区时,我们面对的不再是算法精度的问题,而是系统级的可信度、延迟与协同性。
能否在复杂、低信号、异构网络环境下保持稳定,是从“实训平台”迈向“实战体系”的最大门槛。
中国的机器人产业,正在以一种前所未有的速度穿越这一门槛。
从政策层面的“人工智能+”“机器人+”行动,到地方政府积极推进的低空经济、智能制造与城市数智化建设,
一个庞大的智能基础设施网络正在成形。
而它的核心,不仅是成千上万台机器,更是让这些机器彼此沟通、协同、感知的通道。
1️⃣ 从单体智能到系统智能
过去的机器人被设计成独立个体;而今天的机器人,正被纳入“网络化协同”的新格局:无人机与地面机器人联动巡检,工业机械臂与数字孪生系统同步调度,城市安防与AI算法共享实时画面。
这一切的前提,是视频与控制数据能够稳定流动。
SmartMediaKit 在此承担的角色,正如人体的神经中枢——它让视觉、听觉、控制信号在机器人之间、机器人与云之间实现毫秒级通信闭环。
在矿区、工厂、校园、港口等典型场景中,
SmartMediaKit 的模块化体系已被用作“机器人视觉中间层”:
-
通过 RTSP/RTMP 推流模块,实现前端机器人实时画面汇聚与边缘节点智能分析;
-
借助 HTTP-FLV / WebSocket-FLV 服务,支持远程调度与多终端监控,保障“云—边—端”一致性;
-
GB28181 接入模块 打通传统视频监控系统,实现跨代际的设备互联;
-
AI Adapter 模块 将视频流与算法引擎无缝衔接,构建出可实时学习与优化的“感知-认知-决策”回路。
这意味着,任何一台机器人,不论来自哪家厂商、运行何种系统,都能在这套通用视频神经网络中共享时空、共享理解、共享决策。这正是“从单体智能到系统智能”的关键跃迁。
2️⃣ 从教学平台到产业操作系统
当“实训平台”完成了教育端的普及,它的逻辑会自然向产业端延展。
这正是宇树与 SmartMediaKit 所代表的“双轨共生”路径:一个在培养智能体的创造者,另一个在构建智能体的运行底座。
教育层的 ROS、Gazebo、强化学习框架,在产业层需要转化为可部署、可运维、可监控的系统。
而视频神经系统的存在,使得这种转化变得“可持续”:
所有训练、验证、调优过程,都能通过标准化的视觉通路回溯、验证与重构。
这让“实训”不再只是教学实验,而成为产业级系统的孵化机制。
3️⃣ 从低空经济到智能体网络
更宏观地看,这场技术变革不仅限于地面机器人。在低空经济、城市感知网、无人系统协作等领域,SmartMediaKit 的低延迟传输与多协议适配能力,已经成为构建空地一体化智能体网络的关键组件:
-
在无人机应急救援中,它可实现空中画面实时推流与地面指挥回传;
-
在低空物流或巡检系统中,它可承担任务节点之间的视觉同步与数据桥接;
-
在AI感知节点协同中,它支持边缘侧算法模型即时部署与视频语义流动。
可以说,这不仅是机器人生态的延伸,更是整个“具身智能基础设施”的雏形。当机器具备了共享视觉的能力,它们也就具备了协作的可能。当机器能够互通语义,它们便能在城市、空域与工业体系中形成自组织网络。
4️⃣ 系统底座:从“可用”到“可信”
真正的产业基础设施,不只是“能跑”,而是“可控、可验证、可复现”。这正是中国机器人生态正在构建的系统底座:一套融合教育、研发、制造、运营的多层技术体系,它以 SmartMediaKit 这样的通信与感知中间层为“神经基座”,以实训平台与智能体教育为“认知接口”,共同支撑起一个可持续生长、可规模复制的智能系统生态。
在未来的十年里,中国的机器人不会只是“制造业的延伸”,而将成为 AI+低空经济+具身智能 的系统节点。那时的竞争,不再是谁的机器更像人,而是谁能构建出一个能“自我学习、自我协同、自我演化”的生态系统。
而这场进化,已经在今天悄然开始——从一套教学平台、一条视频链路、一段SDK代码开始,
向整个智能时代的底座生长。
六、结语:从硬件的力量到生态的温度
技术的尽头,从来不是钢铁与算法,而是人与系统的共鸣。
在机器人产业的早期,我们为每一次机械臂的平稳落地欢呼,为每一次算法的成功收敛兴奋。那是“硬件的力量”的时代——用精密结构去丈量人类的创造力,用扭矩与速度去证明工业的极限。
但当机器开始“看见”、开始“听见”、开始“学习”时,它们也悄悄跨过了一条界线——从被制造的物件,变成了能与世界持续对话的存在。而这一刻,技术开始有了温度。
宇树的实训平台,是让更多人理解智能、创造智能的土壤;SmartMediaKit 的视频神经系统,则是让智能真正感知世界的血脉。一个培育思想,一个连接现实——前者让人走近机器,后者让机器走近世界。
这两股力量在今天的中国,正在汇聚成一种新的“系统文明”:它不只是科技创新的集合,更是一种教育、产业与社会结构的再造。当成千上万的开发者、学生、研究者在同一套神经体系中学习、实验、创造,机器不再冰冷,智能不再孤立,技术也不再是一场孤独的征程,而是一场共生的进化。
未来十年,中国的机器人产业,或许不必再用“谁走得更像人”来证明自己,而将用“谁连接了更多的人与智能体”来定义时代。
因为真正的智能,不是被造出来的——而是在无数人的创造与协同中,被唤醒的。从硬件的力量,到生态的温度,这条路,正是中国新一代科技的温柔与雄心。
📎 CSDN官方博客:音视频牛哥-CSDN博客

有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐

 5
5 0
0- 0



 已为社区贡献58条内容
已为社区贡献58条内容

所有评论(0)