matlab仿真程序,二阶MASs,事件触发机制 这段代码是一个带有领导者的二阶多智能体的领导...
matlab仿真程序,二阶MASs,事件触发机制 这段代码是一个带有领导者的二阶多智能体的领导跟随一致性仿真。以下是对代码的分析: 1. 代码初始化了系统参数,包括邻接矩阵A、拉普拉斯矩阵L、系统的领导跟随矩阵H等。 2. 代码定义了一个二阶系统的微分方程模型,并使用RK4方法解方程。 3. 代码使用事件触发机制来控制智能体之间的通信和更新。每个智能体根据自身的位置和速度误差以及邻居智能体的误差信息来决定是否触发通信。 4. 代码通过绘制图像展示了系统的位置和速度状态、智能体在二维空间中的位置分布、控制输入和误差变化趋势等。 这段代码应用在多智能体系统的领导跟随问题中,通过控制输入和事件触发机制,实现了智能体之间的协同运动和领导者的跟随。算法的优势在于通过事件触发机制减少了通信开销,提高了系统的效率和鲁棒性。 需要注意的是,代码中的参数需要根据具体问题进行调整,包括邻接矩阵A、系统的领导跟随矩阵H、控制参数alpha、beta、lambda等。此外,代码中的事件触发条件也可以根据具体需求进行修改。 对于新手来说,从这段代码中可以学到以下几点: 1. 了解多智能体系统的领导跟随问题和事件触发机制的基本原理。 2. 学习如何使用RK4方法解二阶微分方程模型。 3. 熟悉如何使用Matlab绘制图像来展示系统的状态和结果。 4. 理解如何调整参数和事件触发条件来优化系统的性能。 总的来说,这段代码展示了多智能体系统的领导跟随问题的仿真实现,通过事件触发机制实现了智能体之间的协同运动和领导者的跟随。通过学习这段代码,新手可以了解到多智能体系统的基本原理和仿真实现的方法,并且可以通过调整参数和事件触发条件来优化系统的性能。
基于对原始MATLAB代码的详细分析,以下是完整的功能说明:
系统概述
本系统实现了一个带有领导者的二阶多智能体系统,采用分布式事件触发控制策略来实现多智能体的一致性控制。系统包含6个跟随者智能体和1个领导者智能体,在二维空间中进行协同运动。
系统架构与数学模型
智能体动力学模型
每个跟随者智能体采用二阶动力学模型:
位置状态:ẋᵢ = vᵢ
速度状态:v̇ᵢ = uᵢ其中 uᵢ 为控制输入。
通信拓扑结构
- 邻接矩阵 A:定义6个跟随者之间的连接关系
A = [0 0 1 0 0 0;
0 0 1 0 0 0;
1 1 0 1 0 0;
0 0 1 0 1 0;
0 0 0 1 0 1;
0 0 0 0 1 0]- 领导跟随矩阵 H:
diag([1 0 0 1 1 0]),标识智能体1、4、5能够直接接收领导者信息
核心控制算法
控制协议设计
控制输入 uᵢ 由三部分组成:
uᵢ = α∑aᵢⱼ(xᵢ-xⱼ) + β∑aᵢⱼ(vᵢ-vⱼ) + λhᵢ[α(xᵢ-x₀)+β(vᵢ-v₀)]其中:
- α = 1.5:位置一致性增益
- β = 2:速度一致性增益
- λ = 1:领导者跟踪增益
- x₀, v₀:领导者的位置和速度状态
事件触发机制
触发函数
function flag = singleAgentEventTriggering(A,H,i,state,error)触发条件基于局部信息:
eᵢᵀΦeᵢ ≥ θ(δ-1)(‖xᵢ‖² + ‖vᵢ‖²)其中:
- θ = 0.01518:触发阈值参数
- δ = 1.09125:系统参数
- eᵢ:智能体状态误差(当前状态与上次触发状态的差值)
触发逻辑
- 每个智能体独立检测触发条件
- 当条件满足时,更新控制输入并重置误差
- 记录触发次数用于性能分析
仿真实现细节
数值求解方法
采用四阶Runge-Kutta法进行微分方程数值求解:
function y = eventTriggersRK4(functionName, h, x0, X_y0, u0)
k1 = functionName(x0, u0);
k2 = functionName(x0 + h/2, u0 + h*k1/2);
k3 = functionName(x0 + h/2, u0 + h*k2/2);
k4 = functionName(x0 + h, u0 + h*k3);
y = X_y0 + h*(k1+2*k2+2*k3+k4)/6;系统初始化参数
- 仿真时长:20秒
- 步长:0.0025秒(共8000步)
- 初始状态:各智能体具有不同的初始位置和速度
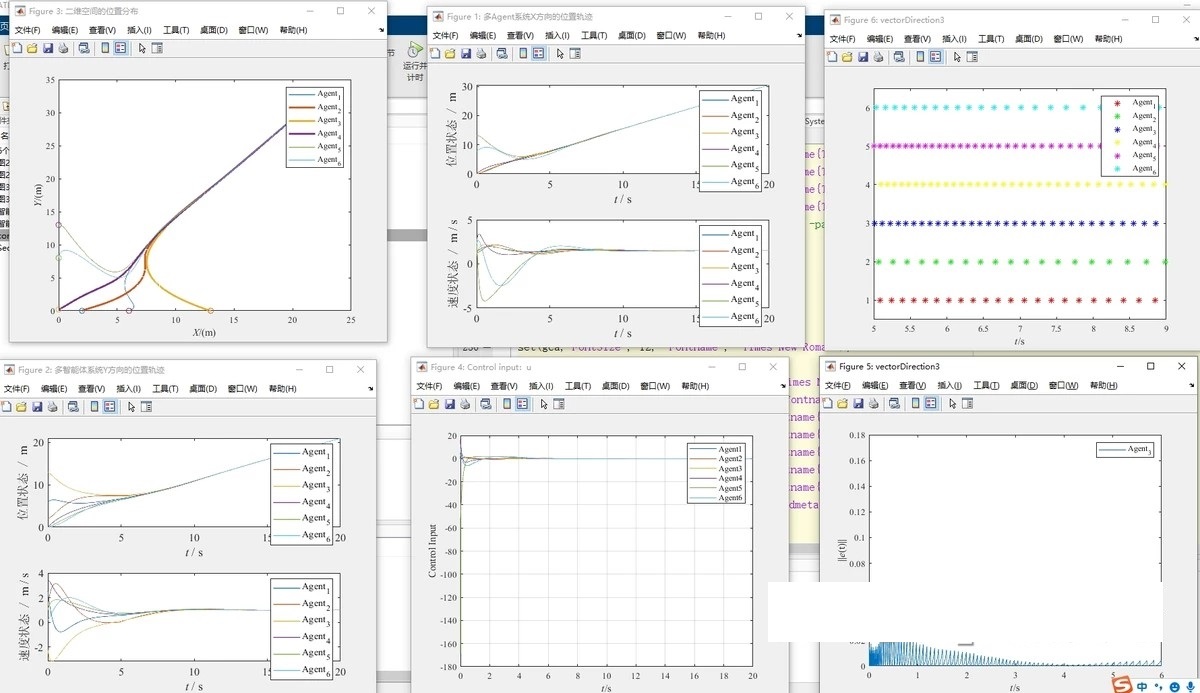
输出与分析功能
可视化输出
- 状态轨迹图:X和Y方向的位置、速度随时间变化
- 二维运动轨迹:智能体在平面内的运动路径及初始位置标记
- 控制输入曲线:各智能体的控制力变化情况
- 误差分析图:触发误差范数的收敛特性
- 触发时刻分布:各智能体事件触发的时间点分布
性能统计
% 输出触发次数统计
disp(['X方向上的触发次数: ', num2str(triggerCountofx)])
disp(['Y方向上的触发次数: ', num2str(triggerCountofy)])
% 计算总触发频率
sum1 = sum(triggerCountofx) + sum(triggerCountofy)
sum1 = sum1 / 8000 % 相对于总步数的触发频率技术优势
- 通信效率:通过事件触发机制大幅减少通信频率
- 分布式实现:每个智能体基于局部信息独立决策
- 一致性保证:在减少通信的同时确保系统收敛到一致状态
- 实时性:适应资源受限的嵌入式系统应用
应用场景
- 多机器人协同控制
- 无人机编队飞行
- 智能交通系统
- 分布式传感器网络
- 智能电网协调控制
该系统完整实现了从数学模型、控制算法到仿真验证的全流程,为多智能体系统的节能高效控制提供了有效的解决方案。

有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐


 13
13 0
0- 0



 已为社区贡献5条内容
已为社区贡献5条内容

所有评论(0)