PPIO上线MiniMax-M2:聚焦编码和智能体,兼容Anthropic SDK
MiniMax-M2 是一款轻量、快速且极具成本效益的(230B 总参数,10B 激活参数)。它在保持强大通用智能的同时,专为任务进行了深度优化,提供了开发者期待的端到端工具使用性能。同时,在全球权威测评榜单 Artificial Analysis 中总分位列全球前五。MiniMax-M2 支持,最大输出 tokens 数为 128K。价格方面,其 API 定价为每 100 万 tokens 输入
今天,PPIO 首发上线 MiniMax 最新发布并开源的模型:MiniMax-M2。
MiniMax-M2 是一款轻量、快速且极具成本效益的 MoE 模型(230B 总参数,10B 激活参数)。它在保持强大通用智能的同时,专为编码和智能体任务进行了深度优化,提供了开发者期待的端到端工具使用性能。同时,在全球权威测评榜单 Artificial Analysis 中总分位列全球前五。
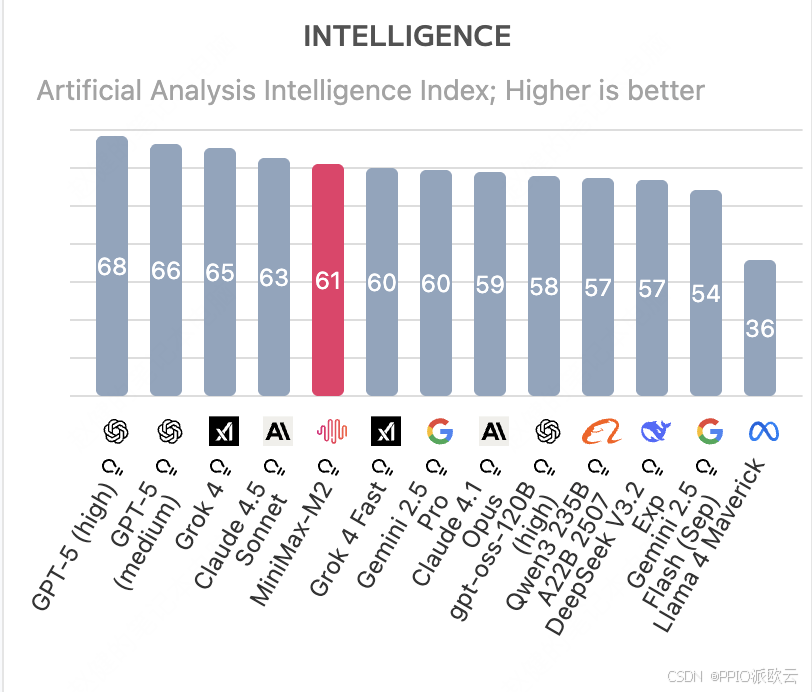
MiniMax-M2 支持 200K 上下文,最大输出 tokens 数为 128K。
价格方面,其 API 定价为每 100 万 tokens 输入 2.1 元,以及输出 8.4元。该定价低于 GLM-4.6、Kimi-K2-0905、DeepSeek-R1-0528 等开源模型,以及 GPT-5、Claude-4.5 等闭源模型。目前 MiniMax-M2 限时免费中。
在线体验:https://ppio.com/llm/minimax-minimax-m2
值得一提的是,MiniMax-M2 同时**兼容 OpenAI SDK 与 Anthropic SDK 协议。**除了 MiniMax-M2,PPIO 平台的下述模型已兼容 Anthropic SDK:
- DeepSeek-V3.1/V3.1-Terminus/V3.2-Exp
- GLM-4.6
- Kimi-K2-Instruct/0905
- Qwen3-Next-80B-A3B-Instruct/Thinking
如果你已经使用 Anthropic SDK 开发了应用程序,只需要将 base URL 和 API Key 替换为 PPIO 的 API 地址和 API Key 即可。
- MiniMax-M2 表现如何?
我们用几组提示词来测试 MiniMax-M2 的实际表现。
提示词1:飞机大战小游戏
用HTML5 Canvas做一个飞机大战的游戏。要求如下:
1) 有终局BOSS关卡,终局BOSS有自己独有的技能,终局BOSS消灭有难度,只有消灭终局BOSS游戏才能通关
2)击败敌机后会随机爆一些道具,道具可以增加子弹威力、效果,也可以让自己短时间内变大。道具吃到了就要马上用掉,有时间限制
3)击败敌机会有经验值,经验够了会升级,升级后会有更强大的子弹技能。
4) 会有一些小BOSS,小BOSS血厚一点,击败会爆一些更强的道具
MiniMax-M2 的生成效果:
提示词2:PPT 封面图制作
用html设计一张极具未来感和科技感的 PPT 封面。
整体风格:赛博朋克 + 高级科技展示,复杂精美但保持专业感。
视觉元素:
背景为深色(黑色/深蓝渐变),层叠的三维几何结构,搭配发光的霓虹线条与网格。
中心有一个抽象的“能量核心”或“数据光环”,由粒子流、光点和环形波纹组成,散发蓝紫色光芒。
周围点缀高科技 HUD 元素(半透明仪表盘、坐标网格、虚拟按钮、扫描线),带有动态感。
在远处加入星空、粒子雨或光束,增加空间纵深。
排版:
标题位于画面中心前景,采用未来感字体(粗体、发光描边,文字占位符:“PPIO派欧云”)。
副标题位于标题下方,较小字体,半透明背景条承载,文字占位符:“中国领先的独立分布式云计算服务商”
配色:
主色调:电光蓝 + 紫色霓虹 + 深空黑。
辅助色:青色、银白色,用于线条和粒子点缀。
规格:16:9 横屏,超高清分辨率,适合作为 PPT 封面,整体效果要酷炫、未来感、科技感十足。
MiniMax-M2 的生成效果:

提示词3:云霄飞车动画,来自karminski-牙医(https://github.com/karminski/awesome-llm-benchmark-prompts/tree/main/instruction)
# Three.js 云霄飞车动画 Prompt
## 目标
创建一个完整且独立的HTML文件,实现一个使用Three.js的云霄飞车动画。动画包含一个小球沿着复杂3D轨道(管道)运动,最终回到起点并循环往复。
---
## 一、技术栈
- HTML, CSS, JavaScript
- 使用 Three.js 库(通过CDN引入最新版本)
- **单一HTML文件**,可直接在浏览器中运行
---
## 二、场景搭建
### 2.1 渲染器
- 创建全屏 `WebGLRenderer`,开启抗锯齿效果
### 2.2 场景
- 创建 `Scene` 对象
- 背景色:淡粉色
- 地面:灰白色平面,无网格
### 2.3 相机
- 使用 `PerspectiveCamera`
- 初始视角:能看到整个轨道概览
### 2.4 光照
- `AmbientLight`:提供基础环境光
- `DirectionalLight`:制造阴影和高光,增加立体感
---
## 三、云霄飞车轨道
### 3.1 路径定义
使用 `CatmullRomCurve3` 创建3D曲线路径,包含以下元素:
- **爬升和俯冲**:高度剧烈变化
- **螺旋/盘旋**:绕Y轴旋转爬升或下降
- **急转弯**:XZ平面大幅度转弯
- **闭环**:终点平滑连接回起点
**CatmullRomCurve3 参数设置:**
```javascript
new THREE.CatmullRomCurve3(points, true, 'chordal', 0.1)
```
- 推荐使用 `'chordal'` 类型,它在处理不均匀分布的点时比 `'centripetal'` 更能避免锐角
- 张力值建议设置为 0.1-0.3,值越小曲线越平滑圆润
- `'chordal'` 类型特别适合高点密度的曲线,能产生更自然的圆角过渡
### 3.2 轨道模型
- 使用 `TubeGeometry` 基于路径生成管道
- 材质:亚克力质感,半透明白色
**TubeGeometry 参数建议:**
- **路径分段数(tubularSegments)**:建议设置为 800-1500,确保管道足够平滑
- 分段数越高,管道在曲率变化大的区域越平滑
- 对于复杂轨道,建议使用 1000 以上
- **径向分段数(radialSegments)**:建议设置为 12-16
- 使管道截面更圆润,避免多边形感
- 8 个分段会让管道看起来像八边形,16 个分段更接近圆形
- **性能平衡**:分段数越高渲染开销越大,需要在性能和视觉效果间权衡
### 3.3 轨道结构类型
建议编写辅助函数(如 `generateHelixPoints()`, `generateFunnelPoints()` 等)生成各段路径点,然后组合成完整轨道。
#### 螺旋段 (Helix Section)
- 紧密的螺旋上升或下降轨道
- 使用三角函数控制X和Z坐标,线性改变Y坐标
#### 弹簧/波浪段 (Spring/Wave Section)
- 连续上下起伏的结构
- 对Y轴坐标应用正弦/余弦函数
#### 漏斗结构 (Funnel Drop)
- 小球从高处进入宽口,螺旋下降后从窄口冲出
- 逐渐缩小螺旋半径
#### 抛射与回归 (Launch & Return)
- 抛物线轨道,小球被"弹射"到空中后落回轨道
- 使用抛物线路径点模拟
#### 多层交叉 (Multi-level Crossover)
- 轨道在不同高度层交叉穿梭
- 类似立交桥结构
#### 垂直环 (Loop-the-Loop)
- 完整的360度垂直圆环
- 绘制完整圆形路径
#### 弹珠台式分支 (Pinball-style Segments)
- 局部管道变宽或视觉化分支
- 添加"挡板"或"障碍"装饰元素
- 创建震荡区(路径左右摇摆或Z字形)
### 3.4 确保平滑过渡(重要)
为避免轨道连接处出现直角或锐角:
#### 精确匹配连接点
- 每个生成函数接受 `startPoint` 参数,返回 `endPoint`
- 确保上一段的最后一个点与下一段的第一个点完全相同
#### 添加过渡段
- 不同形状段落之间插入3-5个过渡点
- 过渡点平滑地从一个段落的切线方向过渡到下一个
- 可使用线性插值或贝塞尔曲线
#### 切线连续性
- 考虑每个段落末端的运动方向
- 确保相邻段落方向角度差小于30度
- 使用 `curve.getTangentAt()` 验证切线平滑度
#### 采样点密度
**内部点生成策略:**
- 每个轨道段生成函数内部必须生成足够密集的点,避免在段内部出现折线或锐角
- **螺旋段和漏斗段**:根据圈数动态设置点数,建议每圈至少 50-60 个点
- 例如:3 圈螺旋需要至少 150-180 个点
- **波浪段**:根据频率动态调整点数,频率越高点数越多
- 建议使用 `Math.max(100, frequency * 50)` 计算点数
- 至少 100 个点以确保波形平滑
- **垂直环**:建议至少 60-80 个点以形成完美圆形
- **抛物线段**:建议 50-60 个点确保抛物线流畅
**点平滑算法应用:**
- 在每个生成函数返回点数组之前,对原始点进行平滑处理
- 推荐使用 **Chaikin 平滑算法**:
- 迭代地在相邻点之间插入新点
- 在两点之间的 25% 和 75% 位置各插入一个点
- 建议进行 1-2 次迭代
- 迭代 1 次点数增加约 2 倍,迭代 2 次增加约 4 倍
- 这种算法特别适合处理通过数学公式生成的规则形状
- 可以有效消除由采样产生的微小折角
**动态点密度:**
- 曲率变化大的区域应该增加点密度
- 可以在生成点后计算相邻点之间的角度变化
- 如果角度变化超过阈值(如 15-20 度),在该区域增加插值点
- 直线段可以使用较少的点,转弯段需要更多点
#### 验证与调试
- 检查相邻点之间的角度变化
- 角度变化超过30度说明可能有尖角
- 建议添加 `validateTrackSmoothness()` 函数
- 开发阶段可在连接处放置标记,使用不同颜色区分段落
### 3.5 轨道质量保证
#### 曲线连续性等级
- 追求 **G1 连续性**(切线方向连续)或更高的 **G2 连续性**(曲率连续)
- **G1 连续**意味着相邻段在连接处方向一致,无尖角
- 小球通过时没有突然的方向改变
- 轨道看起来自然流畅
- **G2 连续**意味着转弯的曲率也平滑变化
- 无突然的加速度变化
- 提供最佳的乘坐体验
#### 测试方法
- 在开发阶段,可以沿轨道绘制切线向量来可视化轨道方向的连续性
- 检查 `TubeGeometry` 生成的管道是否有任何扭曲、折叠或不自然的角度
- 使用较小的管道半径(如 0.5-1.0)测试时可以更容易看出轨道的不平滑之处
- 在浏览器中以慢速播放动画,观察小球是否有任何"跳跃"或"卡顿"现象
#### 常见问题排查
- **问题:管道某处有明显的"拐点"或"折线"效果**
- 原因:该处点密度不足或相邻点角度变化过大
- 解决:增加该段的采样点数,或应用点平滑算法
- **问题:管道出现扭曲或自相交**
- 原因:`TubeGeometry` 的径向分段数不足,或路径曲率过大
- 解决:增加径向分段数到 16,或减小管道半径
- **问题:整体曲线呈现"硬边"效果**
- 原因:`CatmullRomCurve3` 的张力值过大
- 解决:降低张力值到 0.1-0.2
- **问题:连接处出现锐角**
- 原因:相邻段的切线方向不连续
- 解决:在段之间添加过渡点,使用贝塞尔曲线插值
---
## 四、小球动画
### 4.1 模型
- 使用 `SphereGeometry` 和 `MeshStandardMaterial`
- 颜色与管道形成对比,清晰可见
### 4.2 动画实现
- 在 `animate` 循环中使用 `Clock` 获取时间
- 根据时间计算小球在路径上的位置(`.getPointAt()` 方法)
- 更新小球的 `position`
- 循环动画:到达终点后从起点重新开始
---
## 五、相机控制
### 5.1 第一人称视角
- 相机跟随小球
- 位置设置在小球稍后方或正上方
- 使用 `.lookAt()` 让相机看向小球前进方向前方
- 创造身临其境的乘坐体验
### 5.2 第三人称视角(OrbitControls)
- 鼠标滚轮:缩放
- 鼠标左键:旋转相机
- 鼠标右键:平移相机
---
## 六、轨道支架系统
### 6.1 目标
为悬空轨道添加支撑柱,增强真实感和视觉效果。
### 6.2 实现方法
#### 采样轨道点
- 按固定间距(40个单位)沿轨道采样
- 使用 `curve.getPointAt(t)` 获取路径点
#### 生成支架柱
对每个采样点:
- 从轨道点向下(-Y方向)做垂线到地面
- 计算支架高度:**支架高度 = 轨道点高度 - 轨道管道半径 - 地面高度**
- 支架应连接到轨道外壁而非中心路径线
- 需要减去 `TubeGeometry` 的半径值
- 使用 `CylinderGeometry` 创建圆柱体(直径0.2单位)
- 放置支架:底部在地面,顶部接触轨道外壁
#### 高度过滤
- 只在轨道离地面高度超过阈值(10个单位)时生成支架
- 避免低矮处支架过于密集
#### 避免重叠(可选)
- **Raycaster检测**:向下发射射线检测是否与现有任何物体相交
- **偏移策略**:检测到重叠时,沿切线方向偏移3单位,如果有重叠则继续偏移
### 6.3 视觉优化
- 使用金属质感的 `MeshStandardMaterial`
- 支架顶部和底部添加装饰件(小圆盘或方块)
- 支架底部添加扁平底座,增加稳固感
---
## 七、实现建议
1. **模块化设计**:为每种轨道结构编写独立生成函数
2. **参数化控制**:使用参数控制轨道尺寸、密度等
3. **性能优化**:合理控制支架数量和几何体复杂度
4. **调试工具**:开发阶段添加可视化辅助(如路径点标记)
5. **曲线平滑优先**:在实现时优先保证轨道的平滑性
- 宁可多生成一些点也要避免锐角和折线
- 现代浏览器完全能处理包含数千个点的曲线
- 平滑的轨道比性能优化更重要,因为不平滑的轨道会严重影响视觉体验
- 在优化阶段再考虑减少点数,而不是一开始就使用最少的点

总体而言,MiniMax-M2 在前端编程能力上展现出了超高的性能表现。
关于 PPIO
PPIO 是中国领先的独立分布式云计算服务商,由 PPTV 创始人、前蓝驰创投投资合伙人姚欣和前 PPTV 首席架构师王闻宇于2018年联合创立,致力于为人工智能、智能体、实时音视频处理、具身智能等新一代场景,提供极致⾼性价⽐、超弹性、低延迟的⼀站式智算、模型及边缘计算服务。 根据 CIC (China lnsights Consultancy) 的资料,按2024年收入计,PPIO 是中国最大的独立边缘云公司,运营着中国最大的算力网络。按日均 tokens 消耗量计,在中国独立 AI 云公司中位列前二名。
新用户现在用**邀请号【24CGOJ】**注册可得 15 元代金券;企业用户认证后可得 200 元代金券。

有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐

 25
25 0
0- 0



 已为社区贡献21条内容
已为社区贡献21条内容

所有评论(0)