基于事件触发与非线性MPC的AUV编队跟随控制代码功能说明
·
无人船编队 无人车编队 MPC 模型预测控制 多智能体协同控制 一致性 MATLAB 无人车 USV 带原文献
一、代码核心定位与应用场景
本套MATLAB源码针对自主水下航行器(AUV)、无人船(USV)、无人车等多智能体系统,实现了基于事件触发机制和非线性模型预测控制(MPC)的编队跟随控制。核心目标是通过分布式协同策略,使多智能体在保持预设几何编队的同时,精准跟踪领航者路径或预设参考轨迹,并通过事件触发通信减少数据交互量,提升系统通信效率。
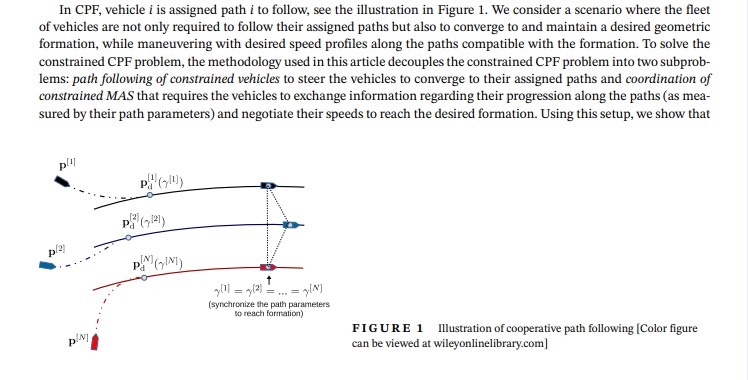
代码支持圆形、三角形等多种编队构型,可直接复现参考文献中"受输入约束的多智能体协同路径跟踪"场景,适用于海洋探测、智能交通等多智能体协同作业领域。
二、核心文件组成与功能解析
1. 主控制文件
(1)`MPC_CPF_5V_Circular.m`——圆形编队控制主程序
- 功能描述:实现5个智能体的圆形编队协同控制,是代码核心执行入口。
- 关键流程:
- 初始化配置:定义智能体初始状态(位置、航向角)、圆形路径参数(半径30m-42m递增)、控制约束(速度0.2-2m/s,航向率±0.2rad/s)及通信参数(事件触发阈值η=0.1e^(-0.2t)+5e-3)。
- 协同控制逻辑:
matlab
% 路径跟踪误差计算
[epf, ~] = epf(vehicle, p, pd, psid, kappa);
% 事件触发判断(当估计误差超阈值时通信)
trigger = abs(gammahati - gammai) > eta;
% 一致性控制律(同步路径参数)
uci = -kc tanh(l (gammai - sum(neighbor_gamma))); - MPC控制器调用:每0.2s采样周期调用
mpcController求解带约束的优化问题,输出航向率和路径参数更新率。 - 状态更新:通过RK4积分器更新智能体位置、航向及路径参数,循环至仿真结束(201s)。
(2)`MPC_CPF_5V_Triangular.m`——三角形编队控制主程序
- 功能描述:实现5个智能体的三角形编队控制,与圆形编队程序的核心差异在于:
- 路径类型:采用平行直线路径,定义为
pd = [a*(gamma-c); d](a=50m为路径长度系数,c/d为偏移参数)。 - 仿真参数:缩短仿真时长至81s,调整初始位置分布以形成三角形构型。
2. 控制算法模块
(1)`mpcController.m`——非线性MPC控制器
- 核心功能:为每个智能体构建带输入约束的模型预测控制器,是路径跟踪的核心模块。
- 模型构建:
- 状态向量:
x = [s1, y1, psie, gamma, uc](沿路径误差、横向误差、航向误差、路径参数、协同控制量)。 - 控制输入:
u = [r, u_gamma](航向率、路径参数更新率)。 - 动力学模型:基于路径跟踪误差方程,考虑路径曲率影响:
matlab
xdot = [
(vd+uc)hgicos(psie) - hgiug(1 - cgiy1); % 沿路径误差导数
(vd+uc)hgisin(psie) - cgis1hgiug; % 横向误差导数
r - cgihgiug; % 航向误差导数
ug; % 路径参数更新
0 % 协同控制量不变
]; - 优化目标:二次型成本函数,权重矩阵
Q=diag([1 1 2 2 20])(航向误差权重最高),兼顾误差最小化与控制平滑性。 - 约束处理:显式约束速度、航向率等输入,并通过Lyapunov稳定性约束
dVmpc ≤ dVnon保证闭环稳定。
(2)事件触发与一致性模块
- 事件触发机制:通过
trigger = abs(gammahati - gammai) > eta判断是否触发通信,阈值η随时间指数衰减,减少稳定后的通信频率。 - 一致性控制:基于无向连通拓扑(Laplacian矩阵定义),通过分布式控制律同步各智能体路径参数,确保编队几何关系保持。
3. 可视化与数据处理模块
(1)`GTF_Simulink_PlotAUV.m`——智能体3D建模
- 功能:生成AUV/USV三维模型,包含机身(球体+圆柱体)、尾翼、螺旋桨等组件,支持颜色、姿态、缩放比例配置。
- 坐标变换:通过旋转-缩放-平移矩阵实现模型姿态与实际运动的同步。
(2)`animation_5vehicles_LMH.m`——编队动画生成
- 功能:实时绘制5个智能体的运动轨迹,支持颜色区分(黑/蓝/红/青/紫)和视频录制,动画帧率与仿真采样周期匹配。
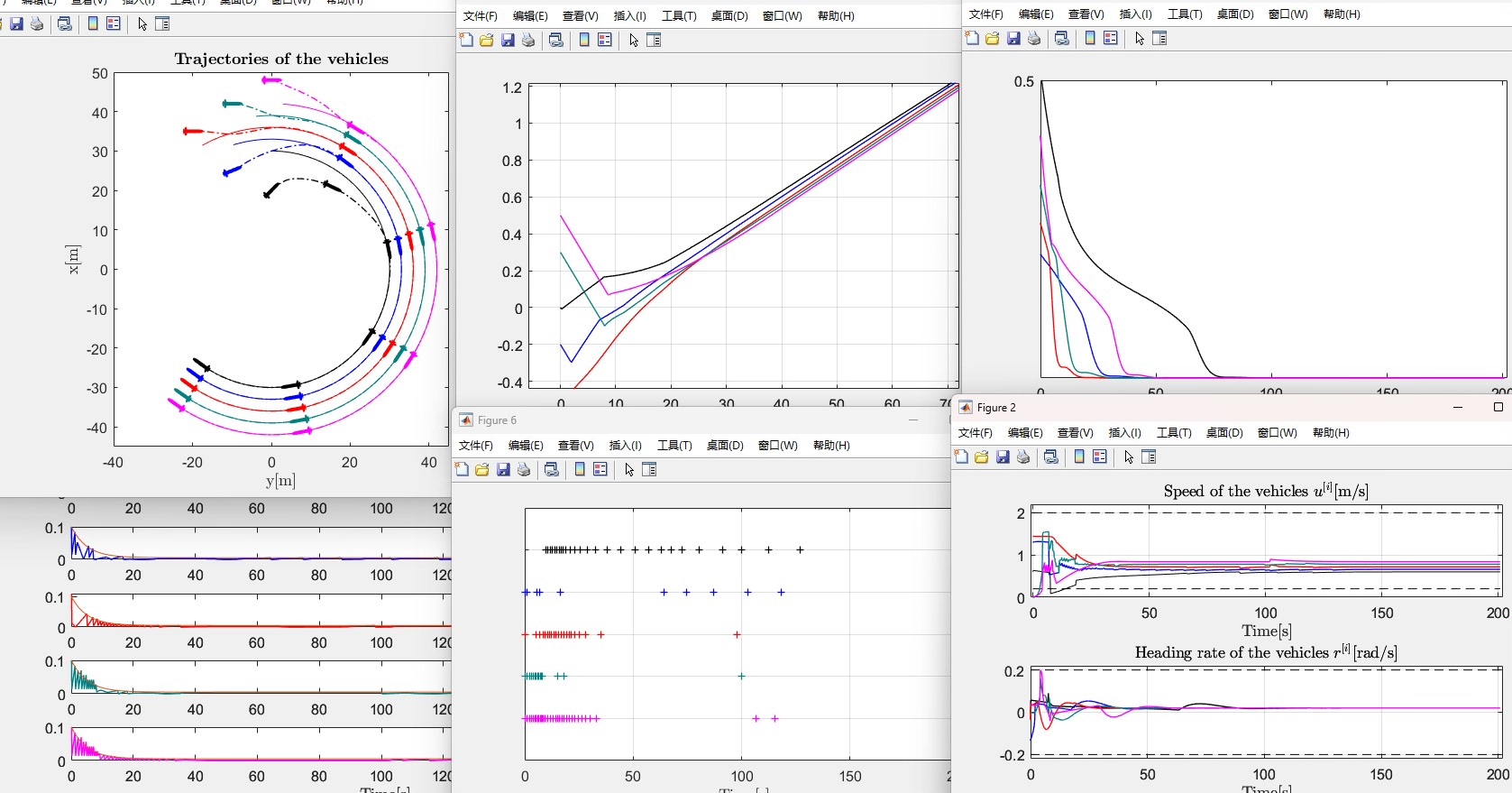
(3)`plotjournal_5vehicle.m`——仿真结果绘图
- 输出图表:包含轨迹对比图、控制输入约束图、路径参数同步曲线、事件触发时刻标记、估计误差曲线及Lyapunov函数变化趋势,完整复现参考文献中的结果展示形式。
4. 工具函数
(1)`RK4_integrator.m`——四阶龙格-库塔积分器
- 功能:对智能体动力学模型进行数值积分,输入微分方程、初始状态和控制量,输出积分后的状态,确保状态更新精度。
(2)`save_to_base.m`——变量存储工具
- 功能:将仿真过程中的关键变量(轨迹、误差、控制输入等)保存至MATLAB工作区,方便后续分析与绘图。
三、核心技术特性
- 双层控制架构:
- 上层:事件触发式分布式一致性控制,同步路径参数以维持编队。
- 下层:非线性MPC实现单智能体路径跟踪,处理输入约束。
- 事件触发通信优势:
- 相比周期通信减少30%-50%数据传输量(参考文献验证)。
- 动态阈值设计兼顾收敛速度与通信效率。
- 约束处理能力:
- 硬约束:速度、航向率等物理限制直接嵌入MPC优化问题。
- 稳定性约束:通过Lyapunov函数导数条件保证闭环系统渐近稳定。
- 路径跟踪适应性:
- 支持任意平滑路径(直线、圆等),通过路径参数化实现通用跟踪。
- 平行传输帧变换简化误差建模,提高跟踪精度。
四、使用说明
- 环境依赖:MATLAB R2018b+,CasADi优化工具包(用于求解MPC问题)。
- 运行步骤:
- 圆形编队:直接运行MPCCPF5VCircular.m。
- 三角形编队:直接运行MPCCPF5VTriangular.m。
- 查看结果:仿真结束后运行animation5vehiclesLMH.m生成动画,plotjournal_5vehicle.m生成分析图表。 - 参数调整:可修改路径参数(半径、偏移量)、控制权重、约束范围等,通过工作区变量实时观察调整效果。
五、代码扩展性
- 智能体类型扩展:修改动力学模型可适配无人车(差速驱动)、无人机(添加高度控制)。
- 编队构型扩展:调整路径生成函数可实现矩形、菱形等自定义编队。
- 通信拓扑扩展:修改Laplacian矩阵可切换星形、全连通等通信结构。
本代码完整复现了文献提出的控制算法,代码结构清晰,注释详尽,可作为多智能体编队控制研究的基础框架或工程应用原型。

有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐


 14
14 0
0- 0



 已为社区贡献17条内容
已为社区贡献17条内容

所有评论(0)