《阻抗式触觉传感器最新研究进展》IEEE SENSORS 2024综述文章解读
阻抗式触觉传感器能模拟人类皮肤触觉,通过测量阻抗变化感知压力、温度等信号。其具有压阻、电容、压电和摩擦电四种工作原理,以及独立阵列、网状和断层成像三种结构形式。相比传统传感器,它具有成本低、响应快、柔性好等优势,可应用于机器人抓取、医疗监测、人机交互等领域。关键技术EIT(电阻抗断层成像)结合AI算法,能实现大面积柔性触觉感知。未来需在多参数感知、材料耐用性和算法精度等方面进一步提升,以满足更复杂
目录
一、先搞懂:阻抗式触觉传感器到底要解决什么问题?
1. 摘要:一句话总结核心内容
“阻抗式触觉传感器” 的东西,它能模拟人的皮肤 “摸东西”—— 能感知压力、温度,甚至区分物体纹理。比起超声、光学传感器,它便宜、反应快,还能做成柔性的(比如贴在机器人手上、做成可穿戴设备)。它有 4 种基本的 “工作原理”(压阻、电容、压电、摩擦电)和 3 种 “结构”(独立阵列、网状、断层成像),它能用来做机器人抓手、手势控制、手术器械、互动玩具这些实际场景。
2. 引言:为什么要研究这种传感器?
咱们先想两个场景:
- 机器人抓鸡蛋:要是没 “触觉”,要么捏碎要么抓不住,需要一种能让机器人 “感知力度” 的传感器;
- 医生戴的智能手环:要能长期贴在皮肤上测脉搏、呼吸,还不能不舒服,这就需要柔性、无创的传感器。
“阻抗式触觉传感器” 正好能解决这些需求 —— 它的核心是 “通过测量‘阻抗’(类似电流的‘阻力’)变化来感知触摸”,比其他传感器(比如电磁、光电)更划算、结构更简单,还能做成 “类皮肤” 的样子。另外,论文还提到一个关键技术叫 “电阻抗断层成像(EIT)”,简单说就是 “不用在传感器内部布线,只靠边缘的电极,就能画出‘哪里被触摸’的图像”,特别适合大面积、柔性的场景(比如机器人全身皮肤)。
二、核心:四种 “摸东西” 的方式
你可以把这四种原理理解成 “四种不同的触觉感知方式”,就像人用不同手指摸东西,各有擅长。论文里用图 1 画了它们的工作逻辑,用表 1 总结了优缺点,咱们一个个说:
1. 压阻式:“捏一下,电阻就变”
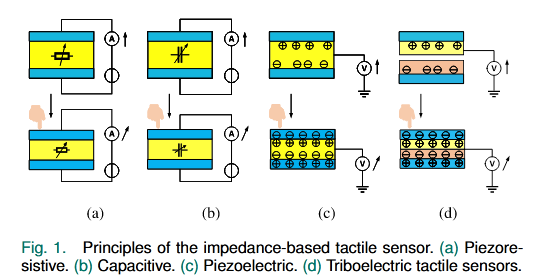
(1)怎么工作?
就像一块海绵里掺了导电颗粒 —— 你一按海绵,颗粒之间靠得更近,电流更容易通过(电阻变小);松开手,海绵回弹,颗粒分开,电阻又变大。传感器就是通过测这个 “电阻变化”,知道你按了多大劲。论文里给了个公式(不用记),核心就是 “压力→海绵形变→电阻变”。
(2)用什么做的?
- 现成材料:比如 “导电橡胶”(像耳机线里的软橡胶,能导电)、“压阻膜”(一种薄塑料膜,按一下电阻就变,比如 Velostat,很便宜);
- 自己做的材料:用软乎乎的基底(比如 PU 泡沫、PDMS—— 一种像硅胶的材料),里面加石墨烯、碳纳米管这些能导电的小颗粒,做成 “软导电复合材料”。
(3)好用吗?
- 优点:灵敏、看得细、便宜—— 比如能分辨出手指按的位置(空间分辨率高),反应也快,适合做机器人的 “智能皮肤”;
- 缺点:“记性差、易坏”—— 比如按下去再松开,它恢复原来的电阻需要点时间(滞后效应),反复按还容易碎,周围有电磁干扰也会测不准。
2. 电容式:“捏一下,电容就变”
(1)怎么工作?
你可以想象两个平行的金属片(电极),中间夹一层软塑料(介电层)—— 这就是一个简单的电容器。你一按,中间的塑料被压扁(电极间距变小),或者两个金属片重叠得更多(面积变大),“电容”(一种储存电荷的能力)就会变。传感器测这个 “电容变化”,就知道压力多大。
(2)用什么做的?
- 中间的 “软塑料”(介电层):可以是多晶硅、弹性体,甚至是空气(气隙设计,按的时候空气层变薄,更灵敏);
- 特殊材料:比如用 3D 织物做基底,能更软、更透气,适合贴在皮肤上。
(3)好用吗?
- 优点:省电、稳定、不怕温度变—— 比如戴在手腕上测脉搏,长时间用也不会不准,耗电量还低;
- 缺点:“怕干扰”—— 周围的电子设备(比如手机)会产生 “寄生电容”,让传感器误以为有压力,导致测量不准。
3. 压电式:“只有动的时候才反应”
(1)怎么工作?
这种传感器像 “压电陶瓷”—— 你一挤压它,它内部的正负电荷会分开,产生微弱电流;但你要是一直按着不动,电荷就不会再变了,电流也没了。所以它只能测 “动态压力”(比如敲一下、晃一下),不能测 “静态压力”(比如一直按住)。
(2)用什么做的?
- 常用材料:PVDF(一种柔性塑料,能弯,适合做可穿戴设备)、PZT(一种陶瓷,硬度高,适合需要稳定的场景)。
(3)好用吗?
- 优点:不用插电、反应快—— 自己能发电(自供电),比如贴在衣服上,走路时的震动就能让它产生信号,适合测动态的力;
- 缺点:“看不见细、只能测动的”—— 比如不能分辨手指按的具体位置(空间分辨率低),你要是一直按住它,它就 “没反应” 了,温度变了也会测不准。
4. 摩擦电式:“蹭一下,就带电”
(1)怎么工作?
就像你用尺子蹭头发,尺子会带电(摩擦起电)—— 这种传感器用两种不同的材料,一按就会蹭到一起,分开时产生微弱电流(电位移)。它和压电式有点像,也是 “靠运动发电”,但原理是 “摩擦” 不是 “挤压”。
(2)用什么做的?
- 常用材料:比如 PDMS 和 PET(两种塑料)贴在一起,或者用织物加 “摩擦纳米发电机(TENG)”,做成能穿的传感器(比如智能手套)。
(3)好用吗?
- 优点:灵敏、不用插电—— 比如轻轻碰一下就能测到,还能自己供电,适合做无电线的可穿戴设备;
- 缺点:“不好做、量程小”—— 两种材料的贴合精度要求高,太难做;而且只能测小力度,按重了超出量程,它就不灵敏了。
四种传感器对比
| 类型 | 优点 | 缺点 | 常用材料举例 |
|---|---|---|---|
| 压阻式 | 灵敏、分辨率高、便宜 | 恢复慢、易坏、怕干扰 | 导电橡胶、Velostat 膜 |
| 电容式 | 省电、稳定、不怕温度变 | 怕电子干扰 | 弹性体、3D 织物、气隙 |
| 压电式 | 自供电、动态反应快 | 只能测动态、分辨率低 | PVDF 塑料、PZT 陶瓷 |
| 摩擦电式 | 灵敏、自供电 | 难制造、量程小 | PDMS/PET、织物 + TENG |
三、传感器 “长什么样”?三种结构
原理是 “怎么感知”,结构就是 “传感器的物理形态”—— 不同结构适合不同场景,比如机器人抓手需要 “精准”,智能地毯需要 “大面积”。论文里用图 3 画了三种核心结构,咱们一个个看:
1. 独立阵列:“很多小传感器排成队”
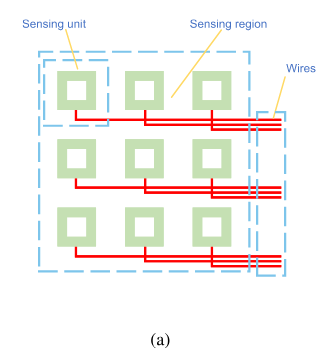
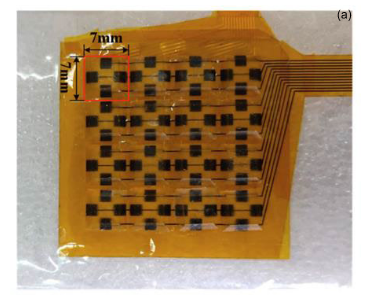
(1)长什么样?
就像一块板子上贴了很多小传感器(比如 64×64 个),每个小传感器都有自己的 “信号线”—— 比如一个 10×10 的阵列,就需要 100 根线,每根线对应一个小传感器。
(2)怎么工作?
你按在哪个小传感器上,哪个就会发送信号,通过所有小传感器的信号组合,就能知道 “按的位置、力度多大”。比如一个 64×64 的压阻阵列,每个小传感器只有 0.9×0.9mm 大,能分辨出 0.9mm 内的触摸(比人指尖还灵敏)。
(3)适合在哪用?

需要 “精准感知” 的场景:比如机器人抓手,能分辨抓的是鸡蛋还是石头;或者触觉手套,能识别摸的是塑料还是布料(靠摩擦电信号,结合 AI 识别率 91%-100%)。
(4)缺点:
“线太多、太复杂”——100 个小传感器就要 100 根线,线多了容易互相干扰(串扰),成本也高,反复弯曲还会断。
2. 网状:“交叉电极像网格”
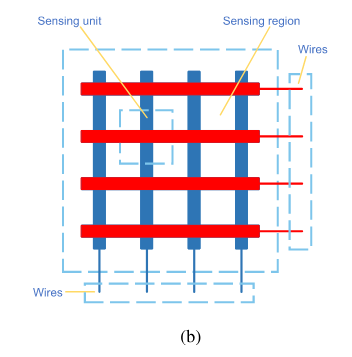
(1)长什么样?
就像一块布上织了两组交叉的电线(比如横向和纵向),横向的是 “激励电极”(发送信号),纵向的是 “测量电极”(接收信号),交叉的地方就是一个 “感知点”(像素)。
(2)怎么工作?
比如横向有 6 根线、纵向有 6 根线,不用 36 根线,只要 12 根(6+6)就能覆盖 36 个感知点 —— 每次给一根横向电线通电,所有纵向电线接收信号,依次循环,就能知道每个交叉点的触摸情况。
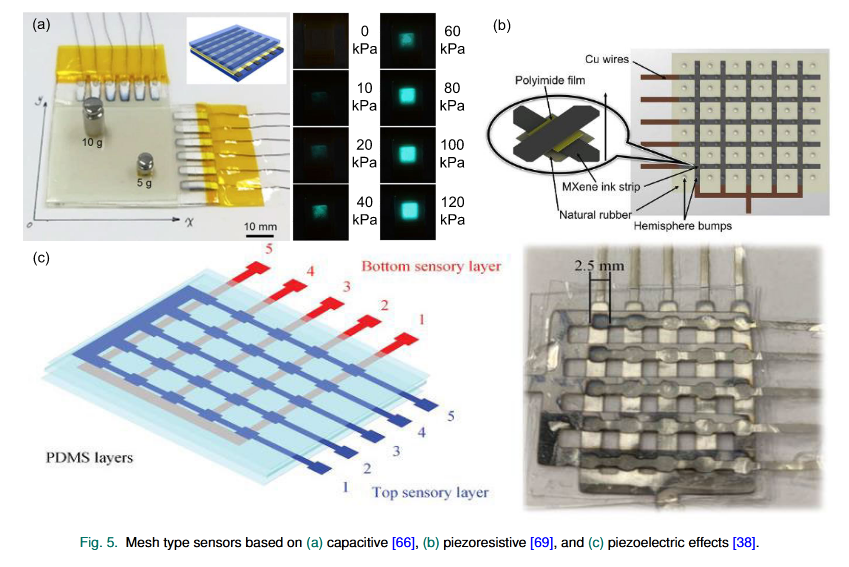
(3)例子:
- 智能皮肤(图 5 (a)):用银纳米线 + PDMS 做电极,交叉成 6×6 的网格,按的时候还会发光(加了荧光粒子),压力越大光越亮,模拟人的 “痛觉”;
- 脉搏监测(图 5 (b)):用压阻材料做网状电极,能测到 0.69Pa 的微弱压力(相当于一根头发的重量),适合贴在手腕上测脉搏。
(4)优点:
“线少、便宜、反应快”—— 比独立阵列省很多线,适合大面积场景(比如智能地毯);缺点是 “一个点坏了,一片用不了”—— 如果一根横向电线断了,那这一行的感知点都没信号了。
3. 断层成像:“不用内线,靠边缘电极”
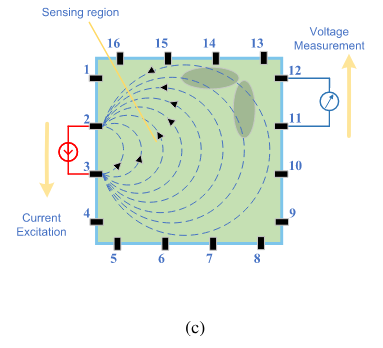
(1)长什么样?
这是最 “聪明” 的结构 —— 传感器边缘绕一圈电极,内部没有任何电线,靠边缘电极 “发送 + 接收信号”,就能算出 “内部哪里被触摸了”。比如一块圆形的柔性材料,边缘贴 8 个电极,按中间的任何位置,边缘电极都能通过 “阻抗变化” 反推按的位置。
(2)核心技术:EIT(电阻抗断层成像)
简单说,就是 “通过边缘信号画内部图像”—— 比如你按在传感器中间,中间的材料会形变,阻抗会变,边缘电极测到这个阻抗变化后,用算法算出 “哪里阻抗变了”,就能画出 “触摸位置图”。
(3)例子:
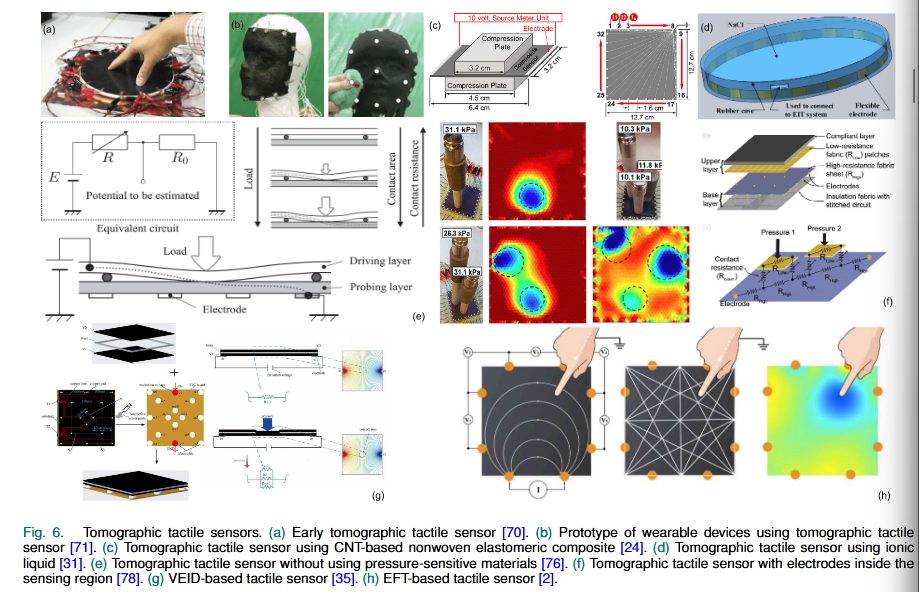
- 可穿戴设备(图 6 (b)):用 EIT 做的柔性传感器,能贴在手臂上,测手臂的弯曲动作;
- 无压敏材料的传感器(图 6 (e)):不用专门的压敏材料,靠两层导电材料的 “接触电阻” 变化感知压力,成本更低,定位误差只有 5.68%;
- 内部电极优化(图 6 (f)):在传感器内部也加电极(不只是边缘),定位更准 —— 比如单点触摸误差从 23.7mm 降到 8.1mm(相当于从 “误差一个手指宽” 降到 “误差一个指甲盖宽”)。
(4)优点:
“无内线、柔性好、大面积”—— 没有内线所以不容易断,能弯能折,适合做机器人全身皮肤、智能地毯;缺点是 “算得慢”—— 从边缘信号反推内部位置需要复杂算法(逆问题),容易算错,需要 AI 帮忙优化。
4. 特殊结构:“少线、简单”
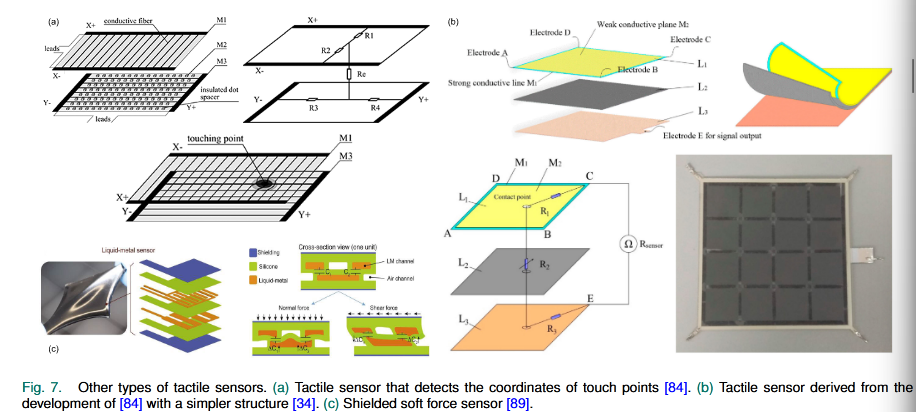
针对 “线太多” 的问题,论文还提了一些简化结构:
- 比如图 7 (a) 的传感器,只用 6 根线,就能测到 0.0214N 的力(相当于 0.2 克的重量),定位误差只有 1.5mm,适合贴在机器人大面积表面;
- 图 7 (c) 的 “屏蔽软力传感器”(像一块薄硅胶),内部是液态金属的微通道,不怕电磁干扰,厚度不到 2mm,能测 14N 的剪切力(比如手指搓动)和 20N 的压力(比如握拳),适合做 VR 手套。
四、EIT 技术:怎么让断层传感器 “算得准”?
断层传感器的核心是 EIT 技术,但 EIT 有个大问题:“从边缘信号反推内部触摸位置,容易算错”(逆问题不适定)—— 比如两个不同的触摸位置,可能测出的边缘信号差不多,算法分不清。论文说,解决办法是 “用 AI(机器学习)帮忙”,简单说就是 “让电脑学大量数据,下次一算就准”。
1. AI 怎么帮忙?
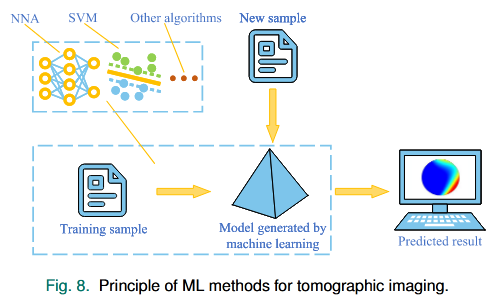
- 第一步:造数据 —— 用软件模拟 10 万 + 种 “触摸场景”(比如按在左上角、按在中间、按两个点),记录每种场景下 “边缘电极的信号” 和 “实际触摸位置”;
- 第二步:训练 AI—— 把 “边缘信号” 当 “输入”,“实际位置” 当 “答案”,教 AI 建立对应关系;
- 第三步:实际用 —— 真的按传感器时,AI 接收边缘信号,直接输出 “触摸位置”,不用复杂计算。
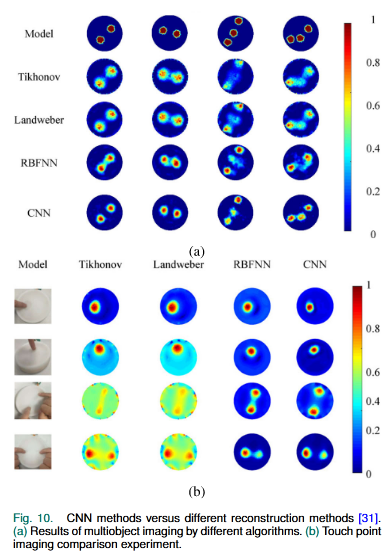
2. 效果有多好?
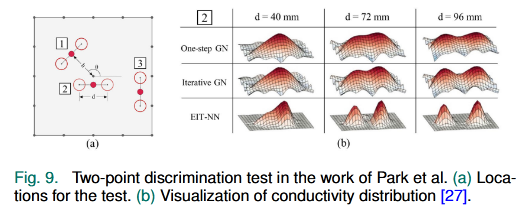
- 例子 1:EIT-NN(一种 AI 模型)—— 比传统算法(GN 算法)更准:空间分辨率指标 RES50 从 75% 升到 83%,RES75 从 82% 升到 90%(数值越高越准),两点触摸也能分清(图 9);
- 例子 2:CNN(卷积神经网络)—— 比其他算法(Tikhonov、Landweber)误差小:RMSE(误差值)低至 0.1,ICC(相似度)高达 0.9(表 2),多目标触摸(比如同时按 3 个点)也能准确识别(图 10 (a)),不会出现 “伪影”(比如明明按一个点,算法画成两个点)。
表 2:AI 算法 vs 传统算法
| 算法 | 单点触摸误差(RMSE) | 单点触摸相似度(ICC) | 双点触摸误差(RMSE) | 双点触摸相似度(ICC) |
|---|---|---|---|---|
| Tikhonov(传统) | 1.210 | 0.719(不太像) | 1.325 | 0.688(不太像) |
| CNN(AI) | 0.068(很小) | 0.946(很像) | 0.101(很小) | 0.912(很像) |
五、传感器能用来做什么?四大应用场景
1. 智能机器人:让机器人 “会摸东西”
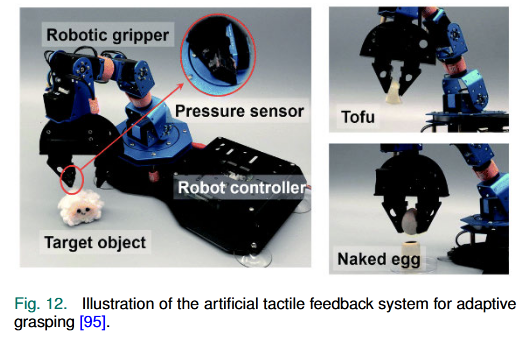
- 自适应抓取(图 12):机器人抓手装电容传感器,抓鸡蛋时能实时测握力,不会捏碎;抓石头时会加大力度,不会掉;
- 发动机检测:航空发动机里的检测机器人(图 12 没画,论文里的例子),装 3D EIT 传感器,能通过 30mm 的窄缝(比手指还细),检测叶片有没有裂纹。
2. 人机交互:用触摸控制设备
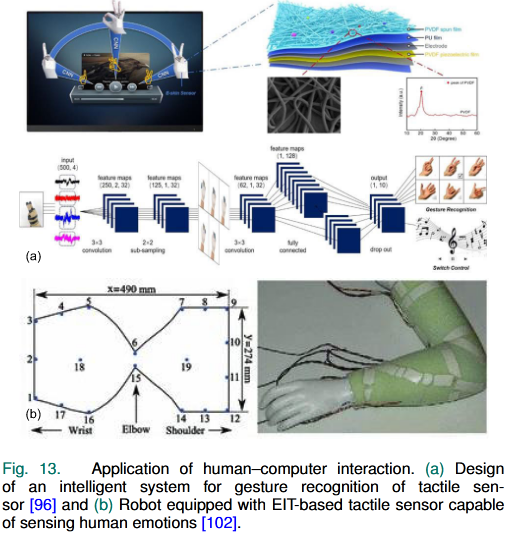
- 手势识别(图 13 (a)):戴一个摩擦电 + 压电的智能手套,做 “握拳、伸手指” 等手势,传感器会发送信号,AI 识别后控制电脑或手机(比如隔空翻页);
- 情感识别(图 13 (b)):人工手臂装 EIT 传感器,能分辨人是 “轻拍”(友好)还是 “紧握”(紧张),未来机器人能理解人的情绪。
3. 医疗健康:无创监测、精准手术
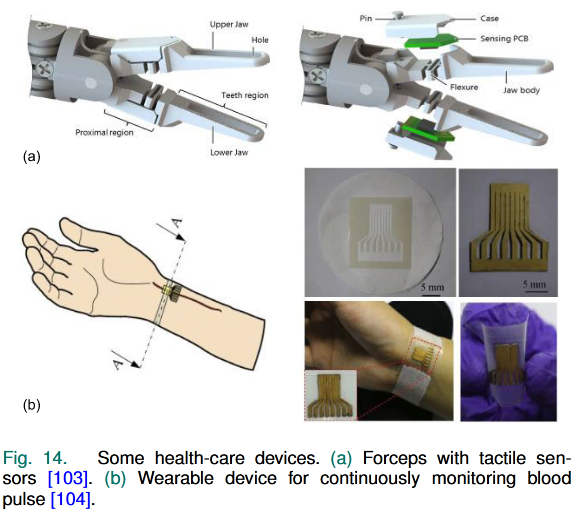
- 手术辅助(图 14 (a)):手术钳装电容传感器,医生夹组织时能实时知道 “夹多紧”,避免夹伤血管;
- 生理监测(图 14 (b)):手腕上戴压阻传感器,能连续测脉搏、血压,甚至贴在腹部测呼吸(比如给老人或病人用,不用插管子);
- 低刺激:用导电纳米网做传感器(论文里的例子),透气、轻,贴在皮肤上不会发炎,适合长期佩戴。
4. 娱乐设备:让玩具、VR 更有趣
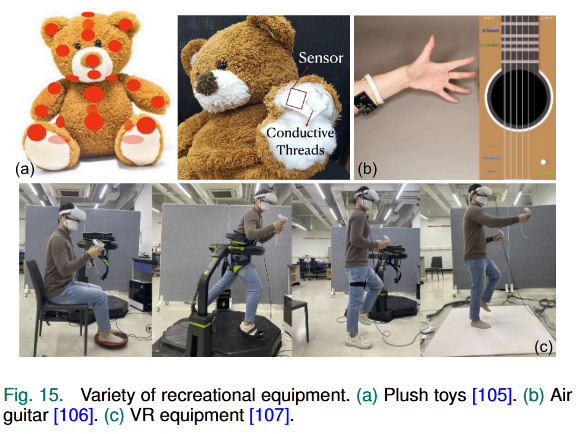
- 互动玩具(图 15 (a)):毛绒玩具里装压阻传感器,孩子拍它、抓它,玩具会发出声音或亮灯(保留织物的柔软感,不会硌得慌);
- 空气吉他(图 15 (b)):不用真吉他,戴一个手势传感器,做 “弹弦” 的动作,就能发出吉他声,随时随地玩;
- VR 地毯(图 15 (c)):智能地毯装网状压阻传感器,人在上面走,传感器能测到 “脚的位置、力度”,转化为 VR 里的 “走路动作”,更有沉浸感。
六、总结:现在怎么样?未来要做什么?(结论与展望)
1. 现在的情况:
- 优点:阻抗式触觉传感器便宜、反应快、能柔性,四种原理、三种结构覆盖了很多场景(机器人、医疗、娱乐),尤其是 EIT+AI 的组合,让大面积、精准感知成为可能;
- 缺点:还在 “实验室阶段”—— 比如大多数传感器只能测 “压力”,不能像人的皮肤一样同时测 “温度 + 纹理 + 重量”(多参数感知);材料不耐用(反复弯容易坏);AI 算法还需要更多真实数据训练。
2. 未来要解决的问题:
- 多参数感知:让一个传感器同时测压力、温度、纹理;
- 材料耐用:开发 “自修复” 材料,断了能自己粘好,反复弯也不坏;
- 算法优化:让 EIT 的图像重建更快、更准,甚至结合光学、超声等其他技术,提升感知能力。

有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐

 20
20 0
0- 0



 已为社区贡献9条内容
已为社区贡献9条内容

所有评论(0)