基于DDPG算法的发电公司竞价策略代码逐逐段解读说明
python代码:基于DDPG(深度确定性梯度策略)算法的售电公司竞价策略研究 关键词:DDPG 算法 深度强化学习 电力市场 发电商 竞价 说明文档:完美复现英文文档,可找我看文档 主要内容: 代码主要研究的是多个售电公司的竞标以及报价策略,属于电力市场范畴,目前常用博弈论方法寻求电力市场均衡,但是此类方法局限于信息完备的简单市场环境,难以直观地反映竞争性的市场环境,因此,本代码通过深度确定性梯度策略算法(DDPG)对发电公司的售价进行建模,解决了传统的RL算法局限于低维离散状态空间和行为空间,收敛性不稳的问题,实验表明,该方法比传统的RL算法具有更高的精度,即使在不完全信息环境下也能收敛到完全信息的纳什均衡。 此外,该方法通过定量调整发电商的耐心参数,可以直观地反映不同的默契合谋程度,是分析市场策略的有效手段。 目前深度强化学习非常火热,很容易出成果,非常适合在本代码的基础上稍微加点东西,即可形成自己的成果,非常适合深度强化学习方向的人学习! 这段代码包含了三个程序,我们分别来进行详细分析。 程序一: ```python import numpy as np from market.three_bus import market_clearing from algorithm.VRE import RothErevAgents import matplotlib.pyplot as plt n_agents = 2 action_space = np.arange(0, 3.1, 0.2) n_steps = 10000 a_real = np.array([15.0, 18.0]) strategic_variables = np.zeros((n_steps, n_agents)) multi_agents = RothErevAgents(n_agents, action_space) for step in range(n_steps): action = multi_agents.select_action() alpha = action * a_real nodal_price, profit = market_clearing(alpha) strategic_variables[step] = alpha multi_agents.learn(profit) if (step + 1) % 1000 == 0: print('Step:', step + 1, 'a1: %.2f' % alpha[0], 'a2: %.2f' % alpha[1], 'r1: %.3f' % profit[0], 'r2: %.3f' % profit[1]) C = np.array([[0.36, 0.58, 0.75], [0.92, 0.28, 0.29]]) plt.plot(strategic_variables[:, 0], lw=0.5, C=C[0], alpha=0.5, label=r"$\alpha_{1t}$") plt.plot(strategic_variables[:, 1], lw=0.5, C=C[1], alpha=0.5, label=r"$\alpha_{2t}$") plt.plot([0, 10000], [20.29, 20.29], '--', C=C[0], label=r"$\alpha_{1t}^\ast$") plt.plot([0, 10000], [22.98, 22.98], '--', C=C[1], label=r"$\alpha_{2t}^\ast$") plt.xlabel(r"$t$") plt.ylabel(r"$\alpha_{gt}$ (\$/MHh)") plt.title("VRE (3-Bus System)") plt.legend() plt.savefig('VRE.png', dpi=600) plt.show() ``` 这段代码主要是使用了RothErevAgents算法来进行市场交易的仿真。程序首先导入了一些必要的库,然后定义了一些变量,包括代理数量(n_agents)、动作空间(action_space)、仿真步数(n_steps)和真实的动作值(a_real)。接下来,创建了一个RothErevAgents对象(multi_agents),该对象使用Roth-Erev算法来选择动作。 在每个步骤中,程序通过调用multi_agents.select_action()来选择动作。然后,根据选择的动作和真实的动作值计算alpha值。接着,使用market_clearing函数计算节点价格和利润。将alpha值存储在strategic_variables数组中,并使用multi_agents.learn()函数来更新代理的策略。 在每1000个步骤后,程序会打印出当前步骤数、alpha值和利润。最后,程序使用matplotlib库绘制了两个alpha值随时间变化的图形,并保存为图片。 程序二和程序三的结构与程序一类似,只是使用了不同的算法(QLearning和DDPG)和模型(ANet2和CNet2)。它们的功能和工作方式与程序一类似,只是算法和模型的不同。
一、核心算法模块(DDPG.py)
1.1 DDPG类初始化
class DDPG(object):
def __init__(self, a_dim, s_dim, a_bound,):
self.a_dim, self.s_dim, self.a_bound = a_dim, s_dim, a_bound[1]
self.memory = np.zeros((MEMORY_CAPACITY, s_dim * 2 + a_dim + 1), dtype=np.float32)
self.pointer = 0
self.sess = tf.Session()
self.actor_eval = self._build_actor_net('actor_eval', trainable=True)
self.actor_target = self._build_actor_net('actor_target', trainable=False)
self.critic_eval = self._build_critic_net('critic_eval', trainable=True)
self.critic_target = self._build_critic_net('critic_target', trainable=False)该部分初始化DDPG算法的核心组件:
- 定义动作维度(adim)、状态维度(sdim)和动作边界(a_bound)
- 创建经验回放缓冲区(memory),用于存储智能体与环境的交互数据
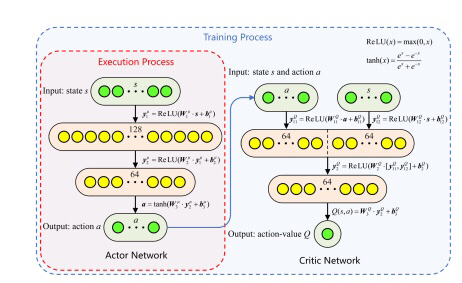
- 构建Actor-Critic架构的四个神经网络:评估网络(actoreval、criticeval)和目标网络(actortarget、critictarget)
- 评估网络用于实时决策和参数更新,目标网络用于计算目标Q值,提高训练稳定性
1.2 神经网络构建
def _build_actor_net(self, name, trainable):
with tf.variable_scope(name):
s = tf.placeholder(tf.float32, [None, self.s_dim], 's')
x = tf.layers.dense(s, 30, activation=tf.nn.relu, name='l1', trainable=trainable)
a = tf.layers.dense(x, self.a_dim, activation=tf.nn.tanh, name='a', trainable=trainable)
return tf.multiply(a, self.a_bound, name='scaled_a'), s
def _build_critic_net(self, name, trainable):
with tf.variable_scope(name):
s = tf.placeholder(tf.float32, [None, self.s_dim], 's')
a = tf.placeholder(tf.float32, [None, self.a_dim], 'a')
w1_s = tf.get_variable('w1_s', [self.s_dim, 30], trainable=trainable)
w1_a = tf.get_variable('w1_a', [self.a_dim, 30], trainable=trainable)
b1 = tf.get_variable('b1', [1, 30], trainable=trainable)
x = tf.nn.relu(tf.matmul(s, w1_s) + tf.matmul(a, w1_a) + b1)
q = tf.layers.dense(x, 1, trainable=trainable)
return q, s, a- Actor网络:输入状态s,通过全连接层(30个神经元)和ReLU激活函数,输出经过tanh激活并缩放的动作值
- Critic网络:联合输入状态s和动作a,通过全连接层计算Q值,评估当前动作的价值
- 采用分开的权重参数确保网络独立性,支持不同的训练策略
1.3 动作选择与经验存储
def choose_action(self, s):
return self.sess.run(self.actor_eval[0], {self.actor_eval[1]: s[np.newaxis, :]})[0]
def store_transition(self, s, a, r, s_):
transition = np.hstack((s, a, [r], s_))
index = self.pointer % MEMORY_CAPACITY
self.memory[index, :] = transition
self.pointer += 1- choose_action:根据当前状态s,通过Actor评估网络生成动作
- storetransition:将状态(s)、动作(a)、奖励(r)和下一状态(s)存储到经验回放缓冲区
- 采用循环缓冲区机制,当存储满时自动覆盖最早的经验数据
1.4 学习过程
def learn(self):
self.sess.run(self.soft_replace)
indices = np.random.choice(MEMORY_CAPACITY, size=BATCH_SIZE)
bt = self.memory[indices, :]
bs = bt[:, :self.s_dim]
ba = bt[:, self.s_dim:self.s_dim+self.a_dim]
br = bt[:, -self.s_dim-1:-self.s_dim]
bs_ = bt[:, -self.s_dim:]
a_ = self.sess.run(self.actor_target[0], {self.actor_target[1]: bs_})
q_ = self.sess.run(self.critic_target[0], {self.critic_target[1]: bs_, self.critic_target[2]: a_})
q_target = br + GAMMA * q_
self.sess.run(self.critic_train, {self.critic_eval[1]: bs, self.critic_eval[2]: ba, self.critic_eval[3]: q_target})
a_loss = -self.sess.run(self.critic_eval[0], {self.critic_eval[1]: bs, self.critic_eval[2]: self.sess.run(self.actor_eval[0], {self.actor_eval[1]: bs})})
self.sess.run(self.actor_train, {self.actor_eval[1]: bs})学习过程实现:
- 软更新目标网络参数(通过预定义的soft_replace操作)
- 从经验缓冲区随机采样批量数据(BATCH_SIZE)
- 分离状态、动作、奖励和下一状态数据
- 计算目标Q值:基于下一状态的目标动作和目标Q值,结合奖励和折扣因子
- 训练Critic网络:最小化预测Q值与目标Q值的均方误差
- 训练Actor网络:通过策略梯度上升最大化Critic评估的Q值
二、电力系统模型(three_bus.py)
2.1 市场出清函数
def market_clearing(alpha1, alpha2):
# 发电公司成本参数
a1 = 15.0; a2 = 18.0
beta1 = 0.05; beta2 = 0.06
pmax1 = 100; pmax2 = 100
pmin1 = 0; pmin2 = 0
# 负荷参数
D1 = 80; D2 = 70
fd1 = 0.03; fd2 = 0.04
# 线路参数
Fmax = 25 # 线路1-2传输容量限制
# 构建二次规划问题
P = matrix([[2*beta1, 0., 0., 0.],
[0., 2*beta2, 0., 0.],
[0., 0., 2*fd1, 0.],
[0., 0., 0., 2*fd2]])
q = matrix([-alpha1, -alpha2, D1/fd1, D2/fd2])
# 约束条件
G = matrix([[1., 0., -1., 0.],
[-1., 0., 1., 0.],
[0., 1., 0., -1.],
[0., -1., 0., 1.],
[1., 1., -1., -1.],
[-1., -1., 1., 1.]])
h = matrix([Fmax, Fmax, Fmax, Fmax, 0., 0.])
# 变量上下限
A = matrix([[1., 0., 0., 0.], [0., 1., 0., 0.]])
b = matrix([pmax1, pmax2])
Aeq = matrix([[0., 0., 1., 0.], [0., 0., 0., 1.]])
beq = matrix([0., 0.])
# 求解
sol = solvers.qp(P, q, G, h, A, b)
result = sol['x']
# 计算节点电价和利润
lambda1 = alpha1 - 2*beta1*result[0] + 2*fd1*result[2]
lambda2 = alpha2 - 2*beta2*result[1] + 2*fd2*result[3]
profit1 = (lambda1 - (a1 + beta1*result[0])) * result[0]
profit2 = (lambda2 - (a2 + beta2*result[1])) * result[1]
return lambda1, lambda2, profit1, profit2该函数实现3节点电力系统的市场出清过程:
- 定义发电公司参数:成本系数(a1,a2,beta1,beta2)、出力上下限(pmax,pmin)
- 定义负荷参数:基础需求(D1,D2)、需求弹性系数(fd1,fd2)
- 设置线路传输容量限制(Fmax=25MW)
- 构建二次规划模型,目标函数为社会福利最大化
- 添加功率平衡、线路潮流、出力限制等约束条件
- 使用cvxopt求解器求解优化问题
- 计算节点电价和各发电公司利润
- 返回节点电价和利润作为环境反馈
三、主运行程序(run_DDPG_3-bus.py)
3.1 初始化设置
import numpy as np
import matplotlib.pyplot as plt
from DDPG import DDPG
from three_bus import market_clearing
# 参数设置
MAX_EPISODES = 10000
MAX_EP_STEPS = 1
a_dim = 1
s_dim = 2
a_bound = [-1, 1]
# 初始化DDPG智能体
agent1 = DDPG(a_dim, s_dim, a_bound)
agent2 = DDPG(a_dim, s_dim, a_bound)
# 存储结果
alpha1_history = []
alpha2_history = []
profit1_history = []
profit2_history = []主程序初始化:
- 设置训练参数:最大 episode 数(10000)、每个 episode 的步数(1)
- 定义动作维度(1)和状态维度(2,对应两个节点电价)
- 创建两个DDPG智能体,分别代表两家发电公司
- 初始化历史记录列表,存储竞价参数和利润变化
3.2 训练过程
for i in range(MAX_EPISODES):
# 初始状态(节点电价)
s = np.array([20.0, 25.0]) # 初始节点电价
# 探索噪声
var = max(0.02, 1 - i/MAX_EPISODES)
# 选择动作
a1 = agent1.choose_action(s)
a2 = agent2.choose_action(s)
a1 = np.clip(np.random.normal(a1, var), -1, 1)
a2 = np.clip(np.random.normal(a2, var), -1, 1)
# 动作映射到实际竞价参数
alpha1 = (a1 + 1) * 15 * 1.5 # 映射到0-45范围
alpha2 = (a2 + 1) * 18 * 1.5 # 映射到0-54范围
# 市场出清
lambda1, lambda2, profit1, profit2 = market_clearing(alpha1, alpha2)
s_ = np.array([lambda1, lambda2])
# 奖励
r1 = profit1 / 1000.0
r2 = profit2 / 1000.0
# 存储经验
agent1.store_transition(s, a1, r1, s_)
agent2.store_transition(s, a2, r2, s_)
# 学习
if i > MEMORY_CAPACITY:
agent1.learn()
agent2.learn()
# 记录历史
alpha1_history.append(alpha1)
alpha2_history.append(alpha2)
profit1_history.append(profit1)
profit2_history.append(profit2)
# 打印信息
if i % 1000 == 0:
print('Episode:', i, 'alpha1:', alpha1, 'alpha2:', alpha2, 'profit1:', profit1, 'profit2:', profit2, 'var:', var)训练循环实现:
- 初始化状态为初始节点电价
- 动态调整探索噪声(随训练进程衰减)
- 智能体选择动作并添加探索噪声
- 将动作映射到实际竞价参数范围(alpha1:0-45, alpha2:0-54)
- 调用市场出清函数获取新状态(节点电价)和奖励(利润)
- 存储经验并在缓冲区满后开始学习
- 记录历史数据并定期打印训练进度
3.3 结果可视化
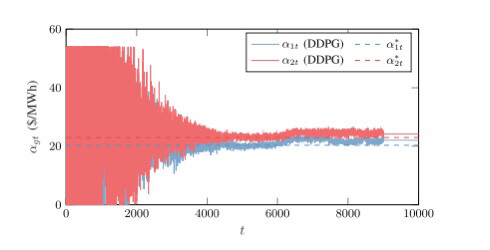
# 绘制竞价参数曲线
plt.figure()
plt.plot(alpha1_history, label='Generator 1 alpha')
plt.plot(alpha2_history, label='Generator 2 alpha')
plt.axhline(y=20.29, color='r', linestyle='--', label='Nash Equilibrium G1')
plt.axhline(y=22.98, color='g', linestyle='--', label='Nash Equilibrium G2')
plt.xlabel('Episode')
plt.ylabel('Alpha')
plt.legend()
plt.title('DDPG Bidding Strategy in 3-bus System')
plt.savefig('DDPG_3_bus.png')
plt.show()可视化部分:
- 绘制两家发电公司的竞价参数变化曲线
- 添加理论纳什均衡值作为参考线
- 设置图表标题、坐标轴标签和图例
- 保存图表并显示
四、其他辅助模块
4.1 QLearning.py
实现Q学习算法作为对比算法,采用表格存储状态-动作价值,通过ε-贪婪策略选择动作,主要包括:
- QLearningTable类:维护Q表和学习参数
- 实现choose_action和learn方法
- 适用于离散状态和动作空间
4.2 thirty_bus.py
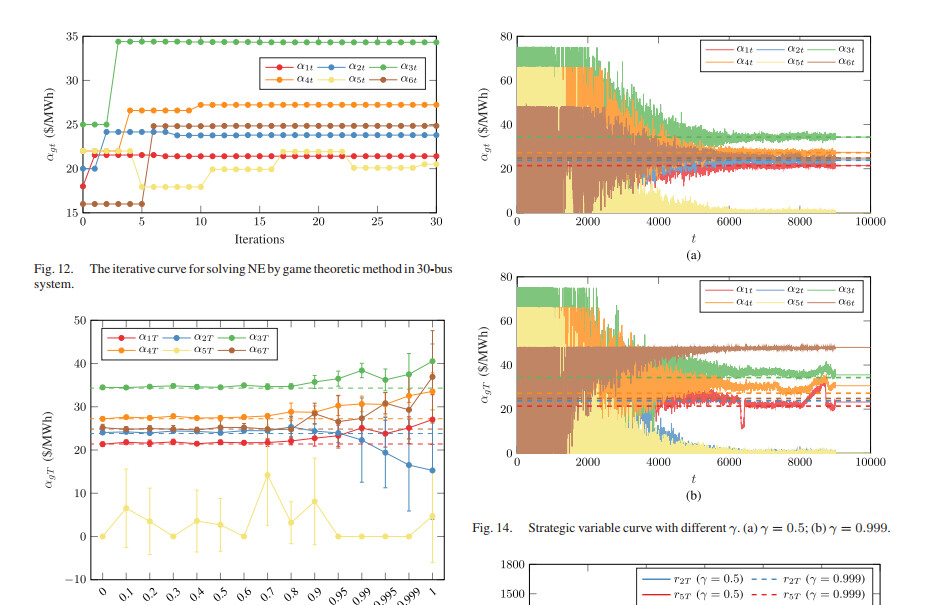
实现IEEE 30节点系统的市场出清模型,包含6家发电公司和20个负荷节点,结构与3节点系统类似,但:
- 包含更多节点和线路约束
- 发电公司和负荷参数更复杂
- 潮流计算更复杂
4.3 VRE.py
实现变分Roth-Erev学习算法,基于历史经验更新动作选择概率,主要特点:
- 通过策略概率分布选择动作
- 动作价值随历史奖励动态更新
- 适用于探索不同的学习机制
五、程序整体逻辑总结
该程序实现了基于DDPG算法的发电公司竞价策略学习系统,整体逻辑如下:
- 发电公司(智能体)通过DDPG算法学习竞价参数α
- 电力市场环境(threebus.py或thirtybus.py)根据竞价参数进行市场出清
- 计算节点电价和发电公司利润,将利润作为奖励反馈给智能体
- 智能体通过经验回放和 Actor-Critic 架构更新策略
- 经过多轮迭代,智能体逐渐收敛到最优竞价策略
- 通过与理论纳什均衡和其他算法(Q-Learning、VRE)对比,验证DDPG算法的有效性
程序设计遵循模块化原则,各模块功能清晰,可扩展性强,支持不同电力系统拓扑和学习算法的对比实验。


有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐


 49
49 0
0- 0



 已为社区贡献23条内容
已为社区贡献23条内容

所有评论(0)