QEM算法原理与实现 (QEM Algorithm Explained)
在三维模型轻量化领域,Quadric Error Metrics(QEM)算法被认为是里程碑式的工作。
它以极高的数学严谨性与计算效率,实现了对复杂网格模型的高保真简化,是后续几乎所有轻量化算法(如 Progressive Mesh、Vertex Clustering、Feature-preserving Simplification)的理论基础。
本章将从数学原理 → 算法流程 → 实现细节 → 优化扩展四个层面,系统解析 QEM 算法的核心思想与工程应用。
一、QEM算法的提出背景
在早期的几何简化研究中,算法主要采用启发式方法(Heuristic-based),例如随机删除顶点、局部边收缩等。
这些方法虽然简单,但容易导致表面塌陷、法线扭曲、边界破坏等问题。
直到 1997 年,Michael Garland 和 Paul Heckbert 在论文 “Surface Simplification Using Quadric Error Metrics” 中提出 QEM(Quadric Error Metrics)算法,使网格简化进入了“可度量化几何误差”的新时代。https://doi.org/10.1145/258734.258849
QEM 的创新在于:
-
以顶点二次误差矩阵(Quadric Matrix)定量描述顶点偏离原曲面的几何代价;
-
将“局部误差”转化为可加的矩阵形式,实现全局可控的误差传播;
-
在保持高保真的同时,支持百万级面片实时简化。
二、数学原理(Mathematical Foundation)
QEM 的核心思想是:
对于任意顶点
,其与模型中某个平面的距离平方可以表示为一个二次型(Quadratic Form)。
(1)平面误差的定义
设一个平面方程为:
则点 到该平面的距离为:
对应的平方误差为:
其中:
(2)顶点误差矩阵的构建
若一个顶点关联个相邻平面
,
则该顶点的总误差为:
其中:
这就是著名的顶点二次误差矩阵(Quadric Error Matrix)。
它是一个对称的矩阵,完整记录了顶点到所有相邻平面的几何偏差。
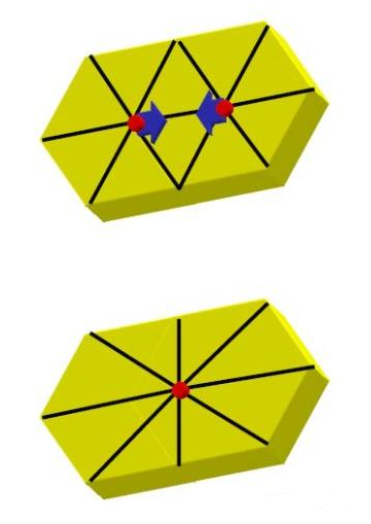
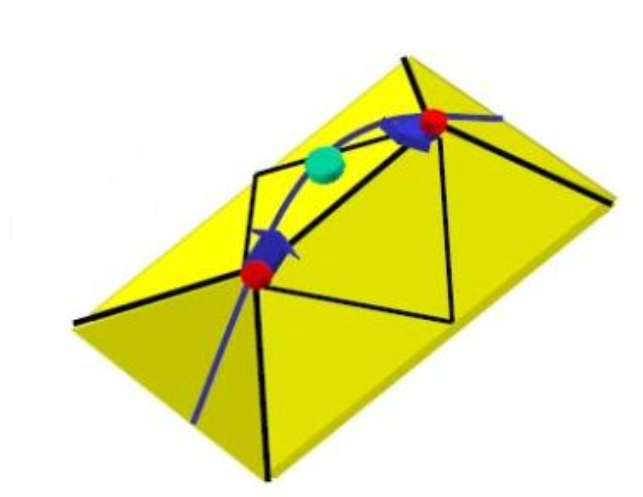
(3)边折叠误差计算
网格简化通过边折叠(Edge Collapse)操作实现。
设边 被折叠为新顶点 v',则折叠误差为:
其中为两个端点的误差矩阵。
最优顶点位置 可通过求解以下线性方程获得:
当矩阵不可逆时,使用近似方案(如端点平均或边中点)代替。
三、算法流程(Algorithmic Workflow)
QEM 算法的总体流程如下:
Step 1️⃣ 计算初始误差矩阵
为每个顶点计算其关联平面集合,累积得到顶点误差矩阵 。
Step 2️⃣ 构建候选边集
将所有边作为潜在的折叠候选,计算其折叠后误差:
Step 3️⃣ 建立优先队列(Priority Queue)
以误差为权重,构建最小堆(Min-Heap),保证每次选取误差最小的边执行折叠。
Step 4️⃣ 执行边折叠
依次从队列中取出最小误差边,合并顶点、更新局部拓扑、重计算相邻误差矩阵。
Step 5️⃣ 更新与迭代
重复步骤 2–4,直到达到预期面数或误差阈值。
四、伪代码实现(Pseudo Code)
struct Vertex {
Vec3 position;
Mat4 Q;
};
struct Edge {
int v1, v2;
double error;
Vec3 optimalPos;
};
priority_queue<Edge> edgeQueue;
for each vertex v:
computePlaneSet(v);
v.Q = sum(p_i * p_i.transpose());
for each edge (v1, v2):
Qsum = v1.Q + v2.Q;
v_opt = solveOptimalVertex(Qsum);
error = v_opt^T * Qsum * v_opt;
push(edgeQueue, {v1, v2, error, v_opt});
while (faceCount > target):
e = edgeQueue.pop();
collapse(e.v1, e.v2, e.optimalPos);
updateNeighbors(e);
五、特性分析(Characteristics)
| 特性 | 描述 |
|---|---|
| 复杂度 | 约 |
| 误差控制 | 可显式计算累积误差,误差传播可控 |
| 可扩展性 | 可扩展到属性误差(纹理、颜色、法线等) |
| 稳定性 | 可保持边界与特征线结构 |
六、改进与扩展(Extensions)
(1)属性保持(Attribute-preserved QEM)
引入多属性权重矩阵:
用于同时保持几何与纹理一致性。
(2)特征保持(Feature-preserving Simplification)
在特征线或高曲率区域添加折叠约束,防止边缘塌陷。
(3)渐进网格(Progressive Mesh)
Hoppe (1996) 提出将简化过程记录为反向操作序列(vertex split),支持多分辨率动态展示。
(4)GPU加速与并行化
利用CUDA/OpenCL将局部误差计算与边更新并行化,实现实时LOD(Level of Detail)渲染。
七、工程应用实例
-
游戏与VR渲染引擎:Unity、Unreal、Godot等均基于QEM或其变体实现实时网格LOD;
-
CAD与逆向工程:QEM用于简化复杂机械零件以加快仿真;
-
数字孪生与元宇宙:用于大规模城市与工业场景模型的在线传输与流式可视化。
八、总结
QEM算法以其优雅的数学形式和高效的执行性能,奠定了现代三维模型轻量化的理论与工程基础。
其核心优势在于:
-
将几何误差显式化;
-
实现误差累积的局部可控;
-
具备强可扩展性与高精度可解释性。
未来的研究方向主要集中在:
-
AI-assisted QEM:基于深度学习预测重要性权重;
-
Adaptive-QEM:针对多模态属性的自适应误差建模;
-
Distributed QEM:面向云端与流式渲染的分布式并行简化框架。

有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐
 8
8 0
0- 0



 已为社区贡献5条内容
已为社区贡献5条内容

所有评论(0)