ROS2&C++核心基础
*话题:**ROS2中节点间进行异步数据传输的命名通道**作用:**作为数据传递的桥梁,连接发布者和订阅者**特点:**基于发布-订阅模式,支持一对多、多对一、多对多通信fill:#333;color:#333;color:#333;fill:none;客户端发送请求接收响应继续执行首先创建自定义服务接口:int64 aint64 b---int64 sumpublic:private:) {re
ROS2核心基础
节点
什么是节点(What is Node)
节点的定义和概念
- 节点: ROS2系统中的基本执行单元,是一个独立的进程
- 功能职责: 每个节点负责特定的功能,如传感器处理、运动控制、决策等
- 通信机制: 节点间通过话题、服务、动作进行通信
节点的特性
节点特性:
├── 独立性 # 每个节点是独立的进程,崩溃不影响其他节点
├── 可重用性 # 同一节点可以启动多个实例
├── 分布式 # 节点可以运行在不同的机器上
├── 命名空间 # 支持命名空间隔离
└── 生命周期 # 具有完整的生命周期管理
节点的组成要素
- 基础标识
- 节点名称和命名空间-确保节点在系统中的唯一识别和组织管理
- 唯一标识符-防止节点名称冲突,支持分布式部署
- 通信接口
- **发布者:**异步发送数据到话题,实现一对多广播通信
- **订阅者:**异步接收话题数据,支持多个订阅者同时监听
- **服务服务器:**提供同步请求-响应服务,处理客户端调用
- **服务客户端:**发起同步请求,等地啊服务器响应
- 动作服务器:处理长时间运行的任务,提供进度反馈
- 动作客户端:发起异步任务请求,接收执行状态和结果
- 配置管理
- 参数声明和验证:定义节点配置项,确保参数类型和范围正确性
- 参数回调处理:监听参数变化。实现动态配置响应
- 动态参数更新:运行时修改节点行为,无需重启节点
- 时间管理
- 周期性定时器:按固定间隔执行任务,如传感器数据采集
- 一次性定时器:延迟执行单次任务,用于超时处理
- 时间戳处理:记录和同步事件和时间,确保数据正确
- 日志系统
- 多级别日志记录:支持DEBUG/INFO/WARN/ERROR等不同重要性级别
- 格式化输出:统一日志格式,便于分析和调试
- 调试信息:提供运行时状态信息,帮助问题定位
- 执行控制
- 回调组管理:组织和调度不同类型的回调函数
- 优先级控制:确保重要人物优先执行
- 并发处理:支持多线程执行,提高系统响应性能
- 生命周期
- 状态管理:跟踪节点当前运行状态
- 配置/激活/停用/清理:标准化节点启动、运行、停止流程
- 状态转换:确保节点安全可靠的在不同状态间切换
节点编程方法
C++节点编程基础
- 创建C++功能包
# 进入工作空间src目录
cd ~/ros2_ws/src
# 创建简单的C++功能包
ros2 pkg create --build-type ament_cmake hello_cpp_node --dependencies rclcpp
命令解析:
- ros2 pkg create
- ROS2的包创建工具
- 用于自动生成标准ROS2包结构
- –build-type ament_cmake
- 指定构建系统类型为ament_cmake
- ament_cmake是ROS2推荐的C++包构建系统
- 基于CMake,提供ROS2特点的构建功能
- hello_cpp_node
- 包名称
- 将创建名为hello_cpp_node的ROS2包
- 包名应遵循小写字母和下划线的命名规范
- –dependencies rclcpp
- 声明包依赖项
- rclcpp是ROS2的C++客户端库
- 自动在package.xml和CMakeLists.txt中添加此依赖项
**执行结果:**该命令将创建以下目录结构:
hello_cpp_node/
├── CMakeLists.txt # CMake构建配置文件
├── package.xml # 包元数据和依赖声明
├── src/ # 源代码目录
└── include/hello_cpp_node/ # 头文件目录
编写节点代码
src/hello_cpp_node/src/hello_node.cpp
这个范例启动一个定时器,间隔一秒打印信息。
#include <iostream>
#include <rclcpp/rclcpp.hpp>
#include <chrono>
#include <string>
// chrono字面量,方便时间单位标识(1s表示1秒)
using namespace std::chrono_literals;
class HelloNode : public rclcpp::Node {
public:
HelloNode() : Node("hello_node"), count_(0) {
// 创建墙时钟定时器,每1秒执行一次timer_callback函数
// create_wall_timer使用系统时钟,不受ROS时钟影响
timer_ = this->create_wall_timer(
1s, std::bind(&HelloNode::timer_callback, this));
RCLCPP_INFO(this->get_logger(), "Hello ROS2 node setup!");
}
private:
void timer_callback() {
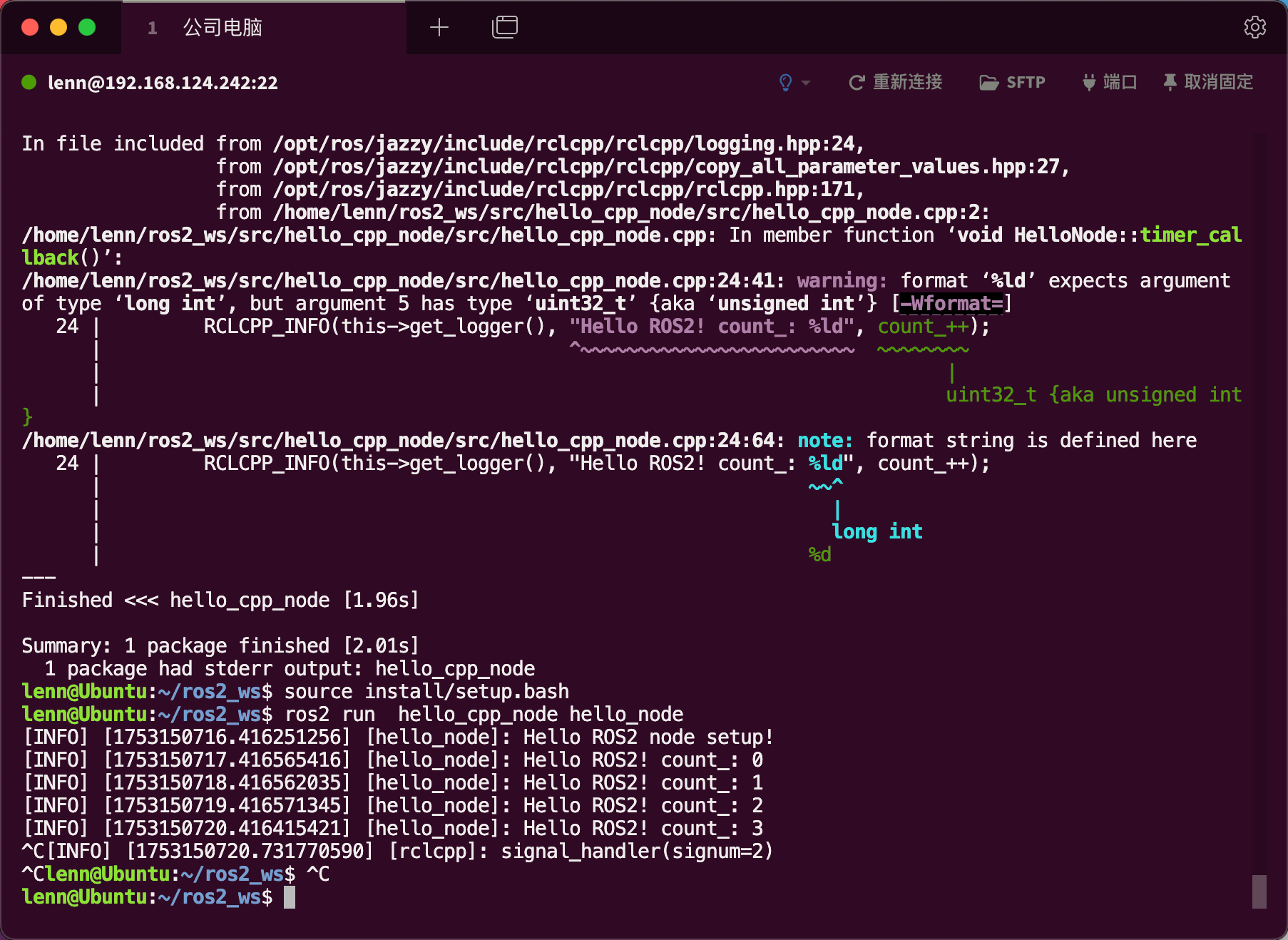
RCLCPP_INFO(this->get_logger(), "Hello ROS2! count_: %ld", count_++);
}
rclcpp::TimerBase::SharedPtr timer_;
uint32_t count_;
};
int main(int argc, char* argv[]) {
rclcpp::init(argc, argv);
auto node = std::make_shared<HelloNode>();
// 进入ROS2事件循环
// 这个函数会被阻塞直到节点关闭
rclcpp::spin(node);
// 清理ros2资源,关闭通信中间件
rclcpp::shutdown();
return 0;
}
设置编译选项
src/hello_cpp_node/CMakeLists.txt
cmake_minimum_required(VERSION 3.8)
project(hello_cpp_node)
if(CMAKE_COMPILER_IS_GNUCXX OR CMAKE_CXX_COMPILER_ID MATCHES "Clang")
add_compile_options(-Wall -Wextra -Wpedantic)
endif()
# find dependencies
find_package(ament_cmake REQUIRED)
find_package(rclcpp REQUIRED)
if(BUILD_TESTING)
find_package(ament_lint_auto REQUIRED)
# the following line skips the linter which checks for copyrights
# comment the line when a copyright and license is added to all source files
set(ament_cmake_copyright_FOUND TRUE)
# the following line skips cpplint (only works in a git repo)
# comment the line when this package is in a git repo and when
# a copyright and license is added to all source files
set(ament_cmake_cpplint_FOUND TRUE)
ament_lint_auto_find_test_dependencies()
endif()
add_executable(hello_node src/hello_cpp_node.cpp)
ament_target_dependencies(hello_node rclcpp)
install(TARGETS
hello_node
DESTINATION lib/${PROJECT_NAME}
)
ament_package()
编译运行
# --run--
cd ~/ros2_ws
# 编译指定包
colcon build --packages-select hello_cpp_node
source install/setup.bash
# 运行 [节点] [节点中的二进制文件]
ros2 run hello_cpp_node hello_node
节点命令行操作
在hello_node运行时的操作命令
节点信息查看
# 查看所有运行的节点
ros2 node list
# 查看节点详细信息
ros2 node info /my_node
# 比如
ros2 node info /hello_node
# 实时查看节点信息
watch -n 1 "ros2 node list"
# 可以停止hello_node,然后启动hello_node,观察watch信息
通信机制-话题
什么是话题
定义和概念
- **话题:**ROS2中节点间进行异步数据传输的命名通道
- **作用:**作为数据传递的桥梁,连接发布者和订阅者
- **特点:**基于发布-订阅模式,支持一对多、多对一、多对多通信
话题组成要素
话题系统:
├── 话题名称 # 唯一标识符,如 "/sensor_data"
├── 消息类型 # 数据格式定义,如 std_msgs/String
├── 发布者 # 发送数据的节点
└── 订阅者 # 接收数据的节点
话题vs其他通信方式
- **话题:**异步、多对多、持续数据流
- **服务:**同步、一对一、请求-响应
- **动作:**异步、长时间任务、带反馈
话题通信模型
多对多通信
通信模式示例:
发布者1 ──┐
发布者2 ──┼──► 话题 "/data" ──┼──► 订阅者1
发布者3 ──┘ ├──► 订阅者2
└──► 订阅者3
异步通信特点
- 发布者: 发送消息后立刻返回,不等待接收确认
- 订阅者: 通过回调函数异步处理接收数据
- 解耦性: 发布审核和订阅者不需要知道对方的存在
消息接口
- 标准消息类型:std_msgs,geometry_msgs,sensor_msgs等
- std_msgs:基础数据类型
//基本数据类型
std_msgs::msg::String text_msg;
text_msg.data = "Hallo ROS2"
std_msgs::msg::Int32 number_msg;
number_msg.data = 42;
// 数组类型
std_msgs::msg::Float64MultiArray array_msg;
array_msg.data = {1.0, 2.0, 3.0, 4.0};
array_msg.layout.dim.push_back(std_msgs::msg::MultiArrayDimension());
array_msg.layout.dim[0].size = 4;
array_msg.layout.dim[0].stride = 4;
array_msg.layout.dim[0].label = "values;
- geometry_msgs-集合和空间信息
* 位置信息 geometry_msgs::msg::Point
* 四元数标识旋转 geometry_msgs::msg::Quaternion
* 位姿信息(位置+旋转) geometry_msgs::msg::Pose
* 带时间戳的位姿 geometry_msgs::msg::PoseStamped
* 速度信息 geometry_msgs::msgs::msg::Twist
* 路径信息 nav_msgs::msg::Path
- sensor_msgs-传感器数据
* 图像数据 sensor_msgs::msg::Image
* 激光扫描数据 sensor_msgs::msg::LaserScan
* 点云数据 sensor_msgs::msg::PointCloud2
* IMU数据 sensor_msgs::msg::Imu
- 自定义消息: 用户可以定义特定的消息格式
- 消息定义文件(.msg) 定义数据结构
# 在msg/目录下创建 RobotStatus.msg
# msg/RobotStatus.msg
string robot_name
geometry_msgs/Pose current_pose
float64 battery_level
bool is_moving
int32[] sensor_readings
RobotMode mode # 自定义枚举
# 常量定义
int32 STATUS_IDLE = 0
int32 STATUS_MOVING = 0
int32 STATUS_CHARGING = 2
- QoS(服务质量): 控制星系传输的可靠性和延迟
- QoS配置参数节选
#include <rclcpp/qos.hpp>
class QosExampleNode: public rclcpp::Node {
public:
QosExampleNode() : Node("qos_example") {
// 可靠性设置
auto reliable_qos = rclcpp::QoS(10)
.reliability(RMW_QOS_POLICY_RELIABILITY_RELIABLE) // 可靠传输
.durability(RMW_QOS_POLICY_DURABILITY_TRANSIENT_LOCAL); // 持久化
auto best_effort_qos = rclcpp::Qos(10)
.reliability(RMW_QOS_POLICY_RELIABILITY_BEST_EFFORT);
...
}
}
C++话题编程示例
创建话题通讯功能包
# 创建功能包
cd ~/ros2_ws/src
ros2 pkg create --build-type ament_cmake topic_example \
--dependencies rclcpp std_msgs
命令解析:
- ros2 pkg create
- ros2:ROS2命令行工具
- pkg:包管理子命令
- create: 创建新包的操作
- –build-type ament_cmake
- –build-type:指定构建系统类型
- ament_cmake:使用CMake构建系统,这是C++包的标准构建方式
- 其他选项还有:ament_python
- topic_example
- 这是想要创建的包名
- 包名必须符合ROS2的命名约定
- –dependencies rclcpp std_msgs
- –dependencies:指定包的依赖
- rclcpp:ROS2的C++客户端库,C++节点开发的核心库
- std_msgs:标准消息类型库,包含基本的消息类型如String,Int32等
简单的发布者示例
源文件
src/topic_example/src/simple_publisher.cpp
#include <iostream>
#include <rclcpp/rclcpp.hpp>
#include <std_msgs/msg/string.hpp>
using namespace std::chrono_literals;
class SimplePublisher : public rclcpp::Node {
public:
SimplePublisher() : Node("simple_publisher"), count_(0) {
publisher_ = this->create_publisher<std_msgs::msg::String>("hello_topic", 10);
timer_ = this->create_wall_timer(
2s, std::bind(&SimplePublisher::timer_callback, this));
RCLCPP_INFO(this->get_logger(), "simple_publisher node setup success");
}
private:
void timer_callback() {
auto message = std_msgs::msg::String();
message.data = "Hello ROS2! message id:" + std::to_string(count_);
RCLCPP_INFO(this->get_logger(), "publish topic: '%s'", message.data.c_str());
publisher_->publish(message);
count_++;
}
rclcpp::TimerBase::SharedPtr timer_;
rclcpp::Publisher<std_msgs::msg::String>::SharedPtr publisher_;
uint32_t count_;
};
int main(int argc, char* argv[]) {
rclcpp::init(argc, argv);
rclcpp::spin(std::make_shared<SimplePublisher>());
rclcpp::shutdown();
return 0;
}
简单的订阅者示例
源文件
src/topic_example/src/simple_subscriber.cpp
#include <rclcpp/rclcpp.hpp>
#include <std_msgs/msg/string.hpp>
#include <chrono>
class SimpleSubscriber : public rclcpp::Node {
public:
SimpleSubscriber() : Node("simple_subscriber") {
subscription_ = this->create_subscription<std_msgs::msg::String>("hello_topic", 10,
std::bind(&SimpleSubscriber::topic_callback, this, std::placeholders::_1));
RCLCPP_INFO(this->get_logger(), "simple_subscriber setup success");
}
private:
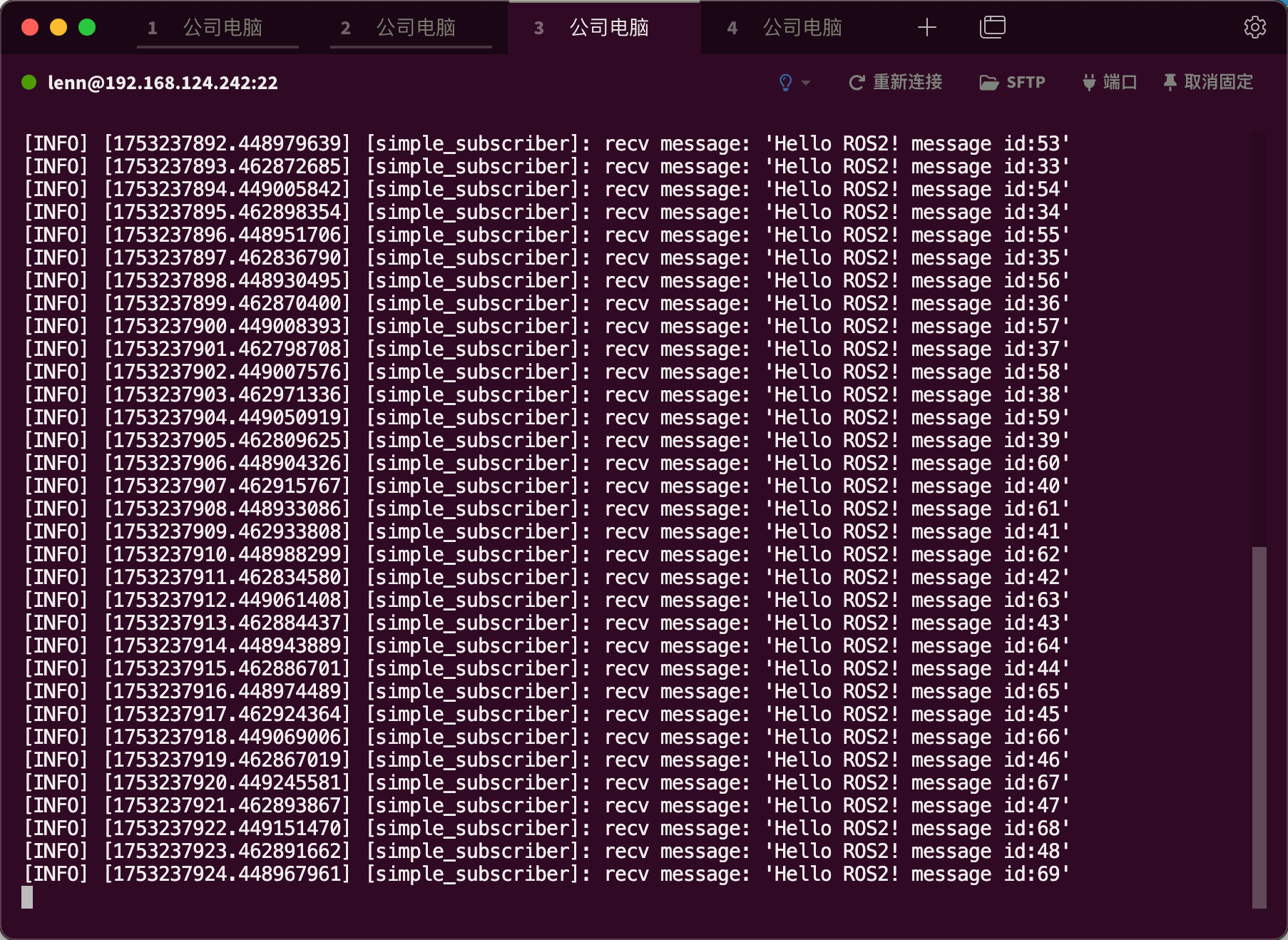
void topic_callback(const std_msgs::msg::String::SharedPtr msg) const {
RCLCPP_INFO(this->get_logger(), "recv message: '%s'", msg->data.c_str());
}
rclcpp::Subscription<std_msgs::msg::String>::SharedPtr subscription_;
};
int main(int argc, char* argv[]) {
rclcpp::init(argc, argv);
rclcpp::spin(std::make_shared<SimpleSubscriber>());
rclcpp::shutdown();
return 0;
}
稍微复杂的发布者示例
源文件
src/topic_example/src/number_publisher
#include <rclcpp/rclcpp.hpp>
#include <std_msgs/msg/int32.hpp>
#include <chrono>
using namespace std::chrono_literals;
class NumberPublisher : public rclcpp::Node {
public:
NumberPublisher() : Node("number_publisher") {
publisher_ = this->create_publisher<std_msgs::msg::Int32>("numbers", 10);
timer_ = this->create_wall_timer(1s, std::bind(&NumberPublisher::publisher_number_callback, this));
RCLCPP_INFO(this->get_logger(), "number publisher setup success");
}
private:
void publisher_number_callback() {
auto msg = std_msgs::msg::Int32();
msg.data = number_;
RCLCPP_INFO(this->get_logger(), "publish number: %ld", number_);
number_++;
publisher_->publish(msg);
}
uint32_t number_;
rclcpp::TimerBase::SharedPtr timer_;
rclcpp::Publisher<std_msgs::msg::Int32>::SharedPtr publisher_;
};
int main(int argc, char* argv[]) {
rclcpp::init(argc, argv);
rclcpp::spin(std::make_shared<NumberPublisher>());
rclcpp::shutdown();
return 0;
}
稍微复杂的订阅者示例
源文件
src/topic_example/src/number_subscriber.cpp
#include <rclcpp/rclcpp.hpp>
#include <std_msgs/msg/int32.hpp>
class NumberSubscriber : public rclcpp::Node {
public:
NumberSubscriber() : Node("number_subscriber"), sum_(0) {
subscription_ = this->create_subscription<std_msgs::msg::Int32>(
"numbers", 10,
std::bind(&NumberSubscriber::number_callback, this, std::placeholders::_1));
RCLCPP_INFO(this->get_logger(), "number_subscriber setup success");
}
private:
void number_callback(const std_msgs::msg::Int32::SharedPtr msg) {
sum_ += msg->data;
RCLCPP_INFO(this->get_logger(), "recv num: %d, sum: %d", msg->data, sum_);
}
rclcpp::Subscription<std_msgs::msg::Int32>::SharedPtr subscription_;
uint32_t sum_;
};
int main(int argc, char* argv[]) {
rclcpp::init(argc, argv);
rclcpp::spin(std::make_shared<NumberSubscriber>());
rclcpp::shutdown();
return 0;
}
编译配置
CMakeLists.txt
cmake_minimum_required(VERSION 3.8)
project(topic_example)
if(CMAKE_COMPILER_IS_GNUCXX OR CMAKE_CXX_COMPILER_ID MATCHES "Clang")
add_compile_options(-Wall -Wextra -Wpedantic)
endif()
# find dependencies
find_package(ament_cmake REQUIRED)
find_package(rclcpp REQUIRED)
find_package(std_msgs REQUIRED)
if(BUILD_TESTING)
find_package(ament_lint_auto REQUIRED)
# the following line skips the linter which checks for copyrights
# comment the line when a copyright and license is added to all source files
set(ament_cmake_copyright_FOUND TRUE)
# the following line skips cpplint (only works in a git repo)
# comment the line when this package is in a git repo and when
# a copyright and license is added to all source files
set(ament_cmake_cpplint_FOUND TRUE)
ament_lint_auto_find_test_dependencies()
endif()
add_executable(simple_publisher src/simple_publisher.cpp)
add_executable(simple_subscriber src/simple_subscriber)
add_executable(number_publisher src/number_publisher)
add_executable(number_subscriber src/number_subscriber)
ament_target_dependencies(simple_publisher rclcpp std_msgs)
ament_target_dependencies(simple_subscriber rclcpp std_msgs)
ament_target_dependencies(number_publisher rclcpp std_msgs)
ament_target_dependencies(number_subscriber rclcpp std_msgs)
install(
TARGETS
simple_publisher
simple_subscriber
number_publisher
number_subscriber
DESTINATION lib/${PROJECT_NAME}
)
ament_package()
编译运行
程序运行后,可以使用`watch -n 1 "ros2 node list"实时查看话题
cd ~/ros2_ws
colcon build --packages-select topic_example
source install/setup.bash
ros2 run topic_example simple_publisher
ros2 run topic_example simple_subscriber
命令行查看话题操作示例
# 查看所有话题
ros2 topic list
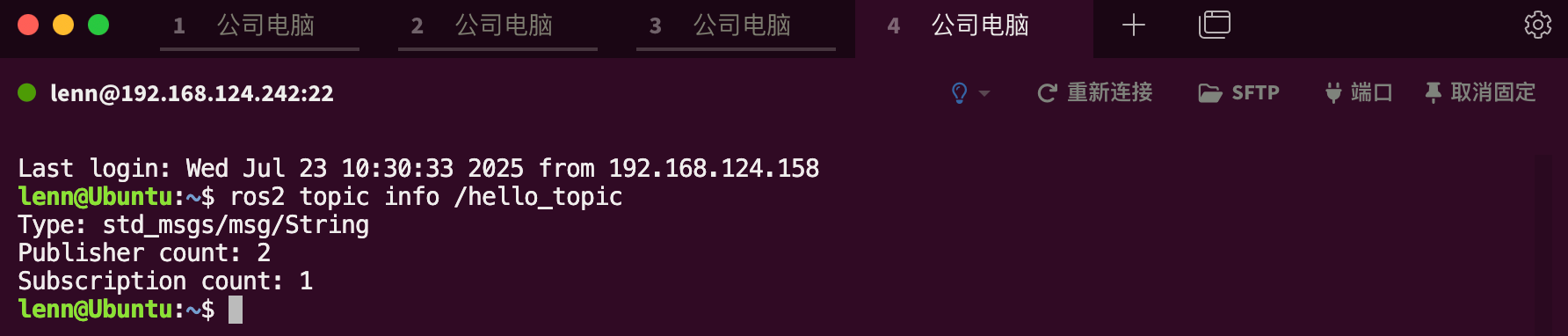
# 查看话题详细信息
ros2 topic info /hello_topic
# 查看话题消息类型
ros2 topic type /hello_topic
# 实时监听话题消息
ros2 topic echo /hello_topic
# 查看话题发布频率
ros2 topic hz /hello_topic
# 查看话题带宽使用
ros2 topic bw /hello_topic
命令行发布消息
# 发布字符串消息
ros2 topic pub /hello_topic std_msgs/msg/String '{data: "命令行发布的消息"}'
# 持续发布消息
ros2 topic pub /hello_topic std_msgs/msg/Stirng '{data: "持续消息"}' --rate 0.5
# 发布数值消息
ros2 topic pub /numbers std_msgs/msg/Int32 '{data: 42}'
# 发布一次后退出
ros2 topic pub --once /hello_topic std_msgs/msg/String '{data: "单次消息"}'
多节点通信测试
# 同时运行多个发布者和订阅者
# 终端1:发布者1
ros2 run topic_example simple_publisher
# 终端2:发布者2(重映射话题名)
ros2 run topic_example simple_publisher --ros-args --remap hello_topic:=hello_topic
# 终端3:订阅者1
ros2 run topic_example simple_subscriber
# 终端4:订阅者2
ros2 run topic_example simple_subscriber
# 终端5:查看话题连接
ros2 topic info /hello_topic
通信机制-服务
什么是服务
服务通信图示
服务通信模型
同步通信特点
异步通信特点
一对多通信模式
- **一个服务端:**提供特定功能的节点
- **多个客户端:**可以同时向同一个服务端发送请求
- 队列处理:服务端按顺序处理客户端请求
服务接口组成
这里的.srv 是重要技术点
服务接口文件 (.srv):
├── 请求部分 (Request)
│ ├── 输入参数1
│ ├── 输入参数2
│ └── ...
├── 分隔符 (---)
└── 响应部分 (Response)
├── 输出参数1
├── 输出参数2
└── ...
服务通信 C++编程示例
创建服务通信功能包
cd ~/ros2_ws/src
ros2 pkg create --build-type ament_cmake service_example \
--dependencies rclcpp std_srvs
命令解析:
- std_srvs:标准服务类型库
与 topic_example 的区别:
| 方面 | topic_example | service_example |
|---|---|---|
| 通信模式 | 发布-订阅 | 请求-响应 |
| 消息库 | std_msgs | std_srvs |
| 通信特点 | 异步、持续 | 同步、临时 |
简单的服务端示例
这里的请求响应格式:
Request:
bool data
Response:
bool success,
string message
源文件
src/service_example/src/simple_service_client.cpp
#include <iostream>
#include <rclcpp/rclcpp.hpp>
#include <std_srvs/srv/set_bool.hpp>
#include <memory>
class SimpleServiceServer : public rclcpp::Node {
public:
SimpleServiceServer() : Node("simple_serive_server"), robot_enabled_(false) {
service_ = this->create_service<std_srvs::srv::SetBool>(
"robot_control",
std::bind(&SimpleServiceServer::handle_servive, this,
std::placeholders::_1, std::placeholders::_2));
RCLCPP_INFO(this->get_logger(), "simple_service_server setup success");
}
private:
void handle_servive(const std::shared_ptr<std_srvs::srv::SetBool::Request> request,
std::shared_ptr<std_srvs::srv::SetBool::Response> response) {
robot_enabled_ = request->data;
response->success = true;
if (robot_enabled_) {
response->message = "robot setup success";
RCLCPP_INFO(this->get_logger(), "get request, robot setup success");
}
else {
response->message = "robot down success";
RCLCPP_INFO(this->get_logger(), "get request, robot down success");
}
RCLCPP_INFO(this->get_logger(), "server response send");
}
rclcpp::Service<std_srvs::srv::SetBool>::SharedPtr service_;
bool robot_enabled_;
};
int main(int argc, char* argv[]) {
rclcpp::init(argc, argv);
rclcpp::spin(std::make_shared<SimpleServiceServer>());
rclcpp::shutdown();
return 0;
}
简单的客户端示例
源文件
src/service_example/src/simple_service_client.cpp
#include <iostream>
#include <rclcpp/rclcpp.hpp>
#include <std_srvs/srv/set_bool.hpp>
#include <chrono>
#include <memory>
using namespace std::chrono_literals;
class SimpleServieClient : public rclcpp::Node {
public:
SimpleServieClient() : Node("simple_service_client") {
client_ = create_client<std_srvs::srv::SetBool>("robot_control");
RCLCPP_INFO(this->get_logger(), "simple_service_client setup success");
// 等待服务变为可用状态
// 这是一个阻塞循环,直到服务上线
while (!client_->wait_for_service(1s)) {
if (!rclcpp::ok()) {
RCLCPP_ERROR(this->get_logger(), "waiting service break...");
return;
}
RCLCPP_INFO(this->get_logger(), "waiting service online...");
}
send_request(true);
std::this_thread::sleep_for(2s);
send_request(false);
}
private:
void send_request(bool enable) {
auto request = std::make_shared<std_srvs::srv::SetBool::Request>();
request->data = enable;
RCLCPP_INFO(this->get_logger(), "send request: %s robot", enable ? "enable" : "disable");
auto future = client_->async_send_request(request);
if (rclcpp::spin_until_future_complete(this->get_node_base_interface(), future) == rclcpp::FutureReturnCode::SUCCESS) {
auto response = future.get();
RCLCPP_INFO(this->get_logger(), "get response: success=%s, message='%s'",
response->success ? "ture" : "false", response->message.c_str());
}
else {
RCLCPP_ERROR(this->get_logger(), "request server error");
}
}
rclcpp::Client<std_srvs::srv::SetBool>::SharedPtr client_;
};
int main(int argc, char* argv[]) {
rclcpp::init(argc, argv);
rclcpp::spin(std::make_shared<SimpleServieClient>());
rclcpp::shutdown();
return 0;
}
自定义服务 接口示例
首先创建自定义服务接口:
src/service_example/srv/AddTwoInts.srv
int64 a
int64 b
---
int64 sum
string message
自定义服务 服务端示例
src/service_example/src/add_service_server.cpp
#include <iostream>
#include <service_example/srv/add_two_ints.hpp>
#include <rclcpp/rclcpp.hpp>
#include <memory>
class AddServiceServer : public rclcpp::Node {
public:
AddServiceServer() : Node("add_service_server") {
service_ = create_service<service_example::srv::AddTwoInts>(
"add_two_ints",
std::bind(&AddServiceServer::add_callback, this,
std::placeholders::_1, std::placeholders::_2));
RCLCPP_INFO(this->get_logger(), "add service setup success");
}
private:
void add_callback(
const std::shared_ptr<service_example::srv::AddTwoInts::Request> request,
std::shared_ptr<service_example::srv::AddTwoInts::Response> response
) {
response->sum = request->a + request->b;
response->message = "calc finished";
RCLCPP_INFO(this->get_logger(), "get req: %d + %d = %d", request->a, request->b, response->sum);
}
rclcpp::Service<service_example::srv::AddTwoInts>::SharedPtr service_;
};
int main(int argc, char* argv[]) {
rclcpp::init(argc, argv);
rclcpp::spin(std::make_shared<AddServiceServer>());
rclcpp::shutdown();
return 0;
}
自定义服务 客户端示例
src/service_example/src/add_service_client.cpp
#include <iostream>
#include <rclcpp/rclcpp.hpp>
#include <service_example/srv/add_two_ints.hpp>
#include <chrono>
using namespace std::chrono_literals;
class AddServiceClient : public rclcpp::Node {
public:
AddServiceClient() : Node("add_service_client") {
client_ = create_client<service_example::srv::AddTwoInts>("add_two_ints");
while (!client_->wait_for_service(1s))
{
/* code */
if (!rclcpp::ok()) {
RCLCPP_ERROR(this->get_logger(), "wait for service break...");
return;
}
RCLCPP_INFO(this->get_logger(), "wait for add service...");
}
}
void send_request(int a, int b) {
auto request = std::make_shared<service_example::srv::AddTwoInts::Request>();
request->a = a;
request->b = b;
RCLCPP_INFO(this->get_logger(), "send request: %d + %d", a, b);
auto future = client_->async_send_request(request);
if (rclcpp::spin_until_future_complete(this->get_node_base_interface(),
future) == rclcpp::FutureReturnCode::SUCCESS) {
auto response = future.get();
RCLCPP_INFO(this->get_logger(), "result: %ld, message: %s", response->sum, response->message.c_str());
}
else {
RCLCPP_ERROR(this->get_logger(), "service error");
}
}
private:
rclcpp::Client<service_example::srv::AddTwoInts>::SharedPtr client_;
};
int main(int argc, char* argv[]) {
rclcpp::init(argc, argv);
auto node = std::make_shared<AddServiceClient>();
node->send_request(2, 3);
node->send_request(5, -5);
node->send_request(0, 10);
rclcpp::shutdown();
return 0;
}
编译配置
CMakeLists.txt
cmake_minimum_required(VERSION 3.8)
project(service_example)
if(CMAKE_COMPILER_IS_GNUCXX OR CMAKE_CXX_COMPILER_ID MATCHES "Clang")
add_compile_options(-Wall -Wextra -Wpedantic)
endif()
# find dependencies
find_package(ament_cmake REQUIRED)
find_package(rclcpp REQUIRED)
find_package(std_srvs REQUIRED)
# 自定义接口依赖包
find_package(rosidl_default_generators REQUIRED)
if(BUILD_TESTING)
find_package(ament_lint_auto REQUIRED)
# the following line skips the linter which checks for copyrights
# comment the line when a copyright and license is added to all source files
set(ament_cmake_copyright_FOUND TRUE)
# the following line skips cpplint (only works in a git repo)
# comment the line when this package is in a git repo and when
# a copyright and license is added to all source files
set(ament_cmake_cpplint_FOUND TRUE)
ament_lint_auto_find_test_dependencies()
endif()
# 生成自定义服务接口
rosidl_generate_interfaces(
${PROJECT_NAME}
"srv/AddTwoInts.srv"
)
add_executable(
simple_service_server
src/simple_service_server.cpp
)
add_executable(
simple_service_client
src/simple_service_client.cpp
)
add_executable(
add_service_client
src/add_service_client.cpp
)
add_executable(
add_service_server
src/add_service_server.cpp
)
ament_target_dependencies(simple_service_server rclcpp std_srvs)
ament_target_dependencies(simple_service_client rclcpp std_srvs)
ament_target_dependencies(add_service_server rclcpp)
ament_target_dependencies(add_service_client rclcpp)
# 链接自定义接口
rosidl_get_typesupport_target(cpp_typesupport_target ${PROJECT_NAME} "rosidl_typesupport_cpp")
target_link_libraries(add_service_server "${cpp_typesupport_target}")
target_link_libraries(add_service_client "${cpp_typesupport_target}")
# rosidl_target_interfaces(add_service_server ${PROJECT_NAME} "rosidl_typesupport_cpp")
# rosidl_target_interfaces(add_service_client ${PROJECT_NAME} "rosidl_typesupport_cpp")
install(
TARGETS
simple_service_server
simple_service_client
add_service_server
add_service_client
DESTINATION lib/${PROJECT_NAME}
)
# 导出依赖
ament_export_dependencies(rosidl_default_runtime)
ament_package()
package.xml
<?xml version="1.0"?>
<?xml-model href="http://download.ros.org/schema/package_format3.xsd" schematypens="http://www.w3.org/2001/XMLSchema"?>
<package format="3">
<name>service_example</name>
<version>0.0.0</version>
<description>TODO: Package description</description>
<maintainer email="lenn@todo.todo">lenn</maintainer>
<license>TODO: License declaration</license>
<buildtool_depend>ament_cmake</buildtool_depend>
<depend>rclcpp</depend>
<depend>std_srvs</depend>
<!-- 自定义接口依赖 -->
<build_depend>rosidl_default_generators</build_depend>
<exec_depend>rosidl_default_runtime</exec_depend>
<member_of_group>rosidl_interface_packages</member_of_group>
<test_depend>ament_lint_auto</test_depend>
<test_depend>ament_lint_common</test_depend>
<export>
<build_type>ament_cmake</build_type>
</export>
</package>
编译运行
cd ~/ros2_ws
colcon build --packages-select service_example
source install/setup.bash
ros2 run service_example simple_servie_server
ros2 run service_example simple_service_client
ros2 run service_example add_service_server
ros2 run service_example add_service_client
运行结果
客户端
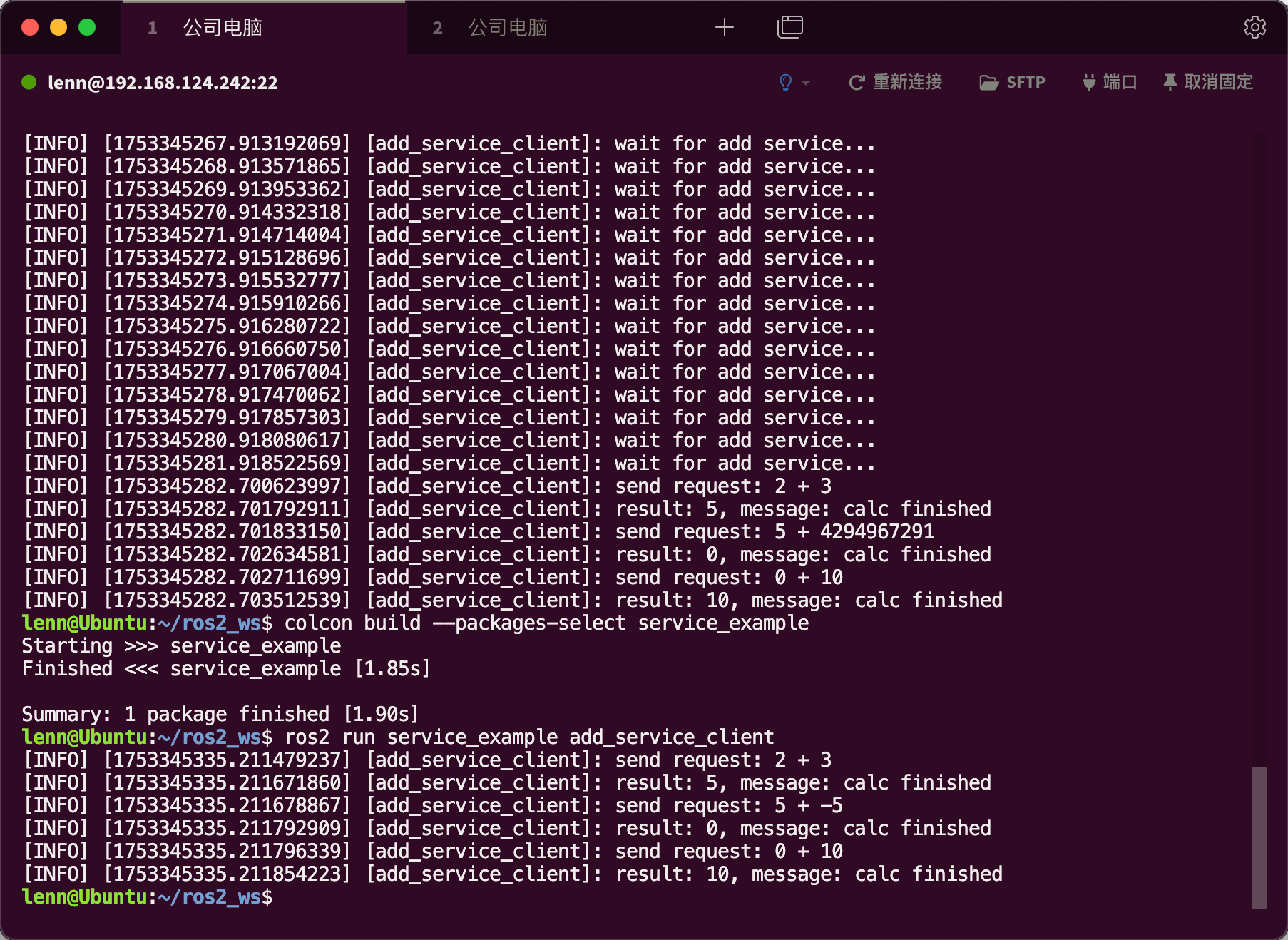
服务端

服务命令行操作
查看服务信息
# 查看所有可用服务
ros2 service list
# 查看服务类型
ros2 service type /simple_service_server
# 查看服务接口定义
ros2 interface show std_srvs/srv/SetBool
# 查看自定义服务接口
ros2 interface show service_example/srv/AddTwoInts
调用服务
# 调用简单服务 启动机器人
ros2 service call /robot_control std_srvs/srv/SetBool '{data:true}'
# 调用简单服务 停止机器人
ros2 service call /robot_control std_srvs/srv/SetBool '{data:false}'
# 调用加法服务
ros2 service call /add_two_ints service_example/srv/AddTwoInts '{a: 5, b: 3}'
服务调试和监控
# 查找提供特定服务的节点
ros2 service find std_srvs/srv/SetBool
# 实时监控服务调用
ros2 service echo /simple_service_server
# 查看服务统计信息
ros2 service info /simple_service_server
话题和服务对比
发布-订阅(Topic)
- 通信模式: 发布者-订阅者模式
- 数据流向: 单向数据流
- 通信方式: 异步
- 连接关系: 多对多
服务(Service)
- 通信模式: 请求-响应模式
- 数据流向: 双向数据交换
- 通信方式: 同步通信
- 连接关系: 多对一(多个客户端,一个服务端)
特别注意:这里的异步是:发送端只管发送数据;这里讲的同步是:发送请求后需要处理响应(这个响应可以是同步也可以是异步)
通信模式图示对比
话题 Topic 通信模式
Topic 通信核心特征:
- 一对多:一个发布者,多个订阅者
- 异步:发布者不等订阅者处理
- 解耦:发布者不需要知道订阅者的存在
- 广播:所有订阅者都能接收到相同的数据
服务 Service 通信模式
Service 通信的核心特征:
- 客户端发送请求后等待响应
- 服务端处理完成返回结果
- 一对一的请求-响应关系
- 同步处理,意思是需要返回结果
选择适合的通信方式是 ROS2 系统设计的关键,应该根据数据特性、频率要求和应用场景来决定。
通信机制-动作
定义和概念
- 动作: ROS2中用于管理长时间运行任务的通信机制
- 特点: 支持目标设置、实时反馈、结果返回和任务取消
- 应用场景: 导航、抓取、充电等需要长时间完成的任务
ROS2动作概念图
动作vs其他通信方式对比
动作通信时序图
C++动作通信接口示例
多动作通信机制数据交互示意图
flowchart LR
subgraph 数据流示意图
A[目标:厨房位置<br/>x=5.0,y=3.0]
B[反馈:距离剩余2.1米<br/>预计时间30s]
C[结果:导航成功<br/>最终误差0.05m]
end
flowchart LR
subgraph 多动作通信系统架构
A[导航服务<br/>Action Server] --> |反馈:当前位置|B[导航控制器<br/>Action Client]
B --> |NavigateToGoal|A
C[机械臂控制器<br/>Action Client] --> |PickAndPlace|D[抓取服务<br/>Action Server]
D --> |反馈:抓取进度|C
E[任务调度器<br/>Action Client] --> |GoToCharging|F[充电服务<br/>Action Server]
F --> |反馈:充电状态|E
end
动作接口定义的方法
cd ~/ros2_ws/src
ros2 pkg create --build-type ament_cmake action_interfaces \
--dependencies rosidl_default_generators rosidl_default_runtime \
geometry_msgs builtin_interfaces
参数说明:
- 包名:action_interfaces
- 约定命名:以_interfaces 结尾,表明这是接口定义包
- 用途:专门用于定义动作接口
- 动作:ROS2中用于长时间运行任务的通信模式
- 核心依赖:接口生成工具
- rosidl_default_generators
- 作用:编译时代码生成器
- 功能:将. action 文件转化为 C++/Python 代码
- 类型:build_depend(构建依赖)
- rosidl_default_runtime
- 作用:运行时支持库
- 功能:提供生成接口的运行时基础设施
- 类型:exec_depend(执行依赖)
- 消息类型依赖:
- geometry_msgs
- 作用:集合相关的标准消息类型包含:
- Point ,Pose, Twist(位置、姿态、速度)
- Vector3, Quaternion(向量、四元数)
- 用途:机器人导航、定位、运动控制
- builtin_interfaces
- 作用:ROS2内置的基础接口类型,包含:
- Time, Duration (时间相关)
- 基础数据类型支持
- 用途:时间戳、持续时间等
基础动作接口定义
使用 — 区分 目标定义 和 结果定义
action/NavigateToGoal.action
# ============================================================================
# 目标定义 (Goal) - 客户端发送给服务器的任务参数
# ============================================================================
# 目标位置和姿态
# 包含坐标系信息、3D位置坐标和四元数姿态
geometry_msgs/PoseStamped target_pose
# 最大移动速度限制(单位:米/秒)
# 用于控制机器人的移动速度,确保安全性
float64 max_speed
# 是否使用路径规划算法
# true:使用高级路径规划避障算法
# false:使用简单的直线导航
bool use_path_planning
# 路径规划算法名称
# 可选值:A_star RRT Dijkstra direct
# 当use_path_planning为true时生效
string planning_algorithm
---
# ============================================================================
# 结果定义 (Result) - 服务器返回给客户端的最终结果
# ============================================================================
# 导航任务是否成功完成
# true:成功到达目标位置
# false:任务失败或被取消
bool success
# 详细的结果描述消息
# 例如:导航成功完成 目标不可达 导航被用户取消
string result_message
# 最终到目标位置的距离误差(单位:米)
# 用于评估导航精度,越小越精确
builtin_interfaces/Duration total_time
# 机器人的最终位置和姿态
# 任务结束时机器人的实际位置
geometry_msgs/PoseStamped final_pose
---
# ============================================================================
# 反馈定义 (Feedback) - 服务器定期发送给客户端的进度信息
# ============================================================================
# 机器人当前位置和姿态
# 实时更新的机器人位置信息
geometry_msgs/PoseStamped current_pose
# 到目标位置的剩余距离(单位:米)
# 动态计算的直线距离,用于显示进度
float64 distance_remaining
# 机器人当前移动速度(单位:米/秒)
# 实时监测的实际移动速度
float64 current_speed
# 任务完成百分比(0-100)
# 基于已完成距离与总距离的比值计算
float64 completion_percentage
# 当前状态描述消息
# 例如: 导航中... 避障中... 重新规划路径...
string status_message
action/ChargeBattery.action
# ============================================================================
# 目标定义 (Goal) - 客户端发送给服务器的任务参数
# ============================================================================
# 目标位置和姿态
# 包含坐标系信息、3D位置坐标和四元数姿态
geometry_msgs/PoseStamped target_pose
# 最大移动速度限制(单位:米/秒)
# 用于控制机器人的移动速度,确保安全性
float64 max_speed
# 是否使用路径规划算法
# true:使用高级路径规划避障算法
# false:使用简单的直线导航
bool use_path_planning
# 路径规划算法名称
# 可选值:A_star RRT Dijkstra direct
# 当use_path_planning为true时生效
string planning_algorithm
---
# ============================================================================
# 结果定义 (Result) - 服务器返回给客户端的最终结果
# ============================================================================
# 导航任务是否成功完成
# true:成功到达目标位置
# false:任务失败或被取消
bool success
# 详细的结果描述消息
# 例如:导航成功完成 目标不可达 导航被用户取消
string result_message
# 最终到目标位置的距离误差(单位:米)
# 用于评估导航精度,越小越精确
builtin_interfaces/Duration total_time
# 机器人的最终位置和姿态
# 任务结束时机器人的实际位置
geometry_msgs/PoseStamped final_pose
---
# ============================================================================
# 反馈定义 (Feedback) - 服务器定期发送给客户端的进度信息
# ============================================================================
# 机器人当前位置和姿态
# 实时更新的机器人位置信息
geometry_msgs/PoseStamped current_pose
# 到目标位置的剩余距离(单位:米)
# 动态计算的直线距离,用于显示进度
float64 distance_remaining
# 机器人当前移动速度(单位:米/秒)
# 实时监测的实际移动速度
float64 current_speed
# 任务完成百分比(0-100)
# 基于已完成距离与总距离的比值计算
float64 completion_percentage
# 当前状态描述消息
# 例如: 导航中... 避障中... 重新规划路径...
string status_message
action/PickAndPlace.action
# @file action_interfaces/action/PickAndPlace.action
# @brief ROS2机械臂抓取放置动作接口定义
# @description 定义了机械臂执行抓取和放置操作的完整动作接口,包括目标参数、执行结果和实时反馈
# ============================================================================
# 目标定义 (Goal) - 客户端发送给服务器的抓取任务参数
# ============================================================================
# 抓取位置和姿态
# 包含目标物体的空间位置坐标和抓取姿态(四元数表示)
geometry_msgs/PoseStamped pick_pose
# 放置位置和姿态
# 机械臂完成抓取后将物体放置到的目标位置和姿态
geometry_msgs/PoseStamped place_pose
# 目标物体标识符
# 用于识别和跟踪特定物体的唯一ID字符串
string object_id
# 夹爪抓取力度 (单位: 牛顿)
# 控制夹爪的抓取力度,避免损坏脆弱物体或抓取力不足
float64 gripper_force
# 接近距离 (单位: 米)
# 机械臂在实际抓取前的预接近距离,用于精确定位
float64 approach_distance
# 是否使用视觉引导
# true: 启用视觉系统进行实时位置修正
# false: 仅使用预设的位置坐标
bool use_vision_guidance
---
# ============================================================================
# 结果定义 (Result) - 服务器返回给客户端的最终执行结果
# ============================================================================
# 抓取放置任务是否成功完成
# true: 完整完成抓取和放置操作
# false: 任务失败或被中断
bool success
# 详细的结果描述消息
# 例如: "抓取放置成功完成", "物体检测失败", "抓取力度不足"
string result_message
# 失败原因详细说明
# 当success为false时,提供具体的失败原因分析
string failure_reason
# 实际使用的夹爪力度 (单位: 牛顿)
# 机械臂实际执行时的夹爪力度反馈值
float64 actual_gripper_force
# 实际抓取位置和姿态
# 机械臂实际执行抓取时的末端执行器位置(可能与目标位置有偏差)
geometry_msgs/PoseStamped actual_pick_pose
# 实际放置位置和姿态
# 机械臂实际放置物体时的末端执行器位置
geometry_msgs/PoseStamped actual_place_pose
# 整个任务的执行时间
# 从开始接近物体到完成放置的总耗时
builtin_interfaces/Duration execution_time
---
# ============================================================================
# 反馈定义 (Feedback) - 服务器定期发送给客户端的执行进度信息
# ============================================================================
# 当前执行阶段标识符
# 可能的值: "approaching"(接近中), "grasping"(抓取中), "lifting"(提升中),
# "moving"(移动中), "placing"(放置中)
string current_phase
# 当前阶段完成百分比 (0-100)
# 表示当前执行阶段的完成程度
float64 phase_completion
# 机械臂末端执行器当前位置和姿态
# 实时更新的机械臂末端坐标和姿态信息
geometry_msgs/PoseStamped current_end_effector_pose
# 夹爪当前开合位置 (单位: 米或度)
# 夹爪的实时开合状态,用于监控抓取过程
float64 current_gripper_position
# 是否检测到目标物体
# true: 传感器成功检测到目标物体
# false: 未检测到物体或物体丢失
bool object_detected
# 夹爪力度反馈 (单位: 牛顿)
# 夹爪传感器实时反馈的抓取力度值
float64 grip_force_feedback
# 当前状态描述消息
# 例如: "正在接近物体...", "调整抓取姿态...", "物体抓取成功..."
string status_message
编译配置
CMakeLists.txt
cmake_minimum_required(VERSION 3.8)
project(action_interfaces)
if(CMAKE_COMPILER_IS_GNUCXX OR CMAKE_CXX_COMPILER_ID MATCHES "Clang")
add_compile_options(-Wall -Wextra -Wpedantic)
endif()
# find dependencies
find_package(ament_cmake REQUIRED)
find_package(rosidl_default_generators REQUIRED)
find_package(rosidl_default_runtime REQUIRED)
find_package(geometry_msgs REQUIRED)
find_package(builtin_interfaces REQUIRED)
find_package(std_msgs REQUIRED)
# if(BUILD_TESTING)
# find_package(ament_lint_auto REQUIRED)
# # the following line skips the linter which checks for copyrights
# # comment the line when a copyright and license is added to all source files
# set(ament_cmake_copyright_FOUND TRUE)
# # the following line skips cpplint (only works in a git repo)
# # comment the line when this package is in a git repo and when
# # a copyright and license is added to all source files
# set(ament_cmake_cpplint_FOUND TRUE)
# ament_lint_auto_find_test_dependencies()
# endif()
# 生成动作接口
rosidl_generate_interfaces(
${PROJECT_NAME}
"action/NavigateToGoal.action"
"action/PickAndPlace.action"
"action/ChargeBattery.action"
DEPENDENCIES
geometry_msgs
builtin_interfaces
std_msgs
)
ament_export_dependencies(rosidl_default_runtime)
ament_package()
package.xml
<?xml version="1.0"?>
<?xml-model href="http://download.ros.org/schema/package_format3.xsd" schematypens="http://www.w3.org/2001/XMLSchema"?>
<package format="3">
<name>action_interfaces</name>
<version>0.0.0</version>
<description>TODO: Package description</description>
<maintainer email="lennlouis@163.com">lenn</maintainer>
<license>TODO: License declaration</license>
<buildtool_depend>ament_cmake</buildtool_depend>
<!-- 接口生成依赖 -->
<build_depend>rosidl_default_generators</build_depend>
<exec_depend>rosidl_default_runtime</exec_depend>
<!-- 接口依赖 不能重复添加-->
<!-- <depend>rosidl_default_generators</depend>
<depend>rosidl_default_runtime</depend> -->
<depend>geometry_msgs</depend>
<depend>builtin_interfaces</depend>
<member_of_group>rosidl_interface_packages</member_of_group>
<test_depend>ament_lint_auto</test_depend>
<test_depend>ament_lint_common</test_depend>
<export>
<build_type>ament_cmake</build_type>
</export>
</package>
编译和验证接口
cd ~/ros2_ws
colcon build --packages-select action_interfaces
# 设置环境
source install/setup.bash
# 验证接口生成
ros2 interface list | grep action_interfaces
执行后显示:
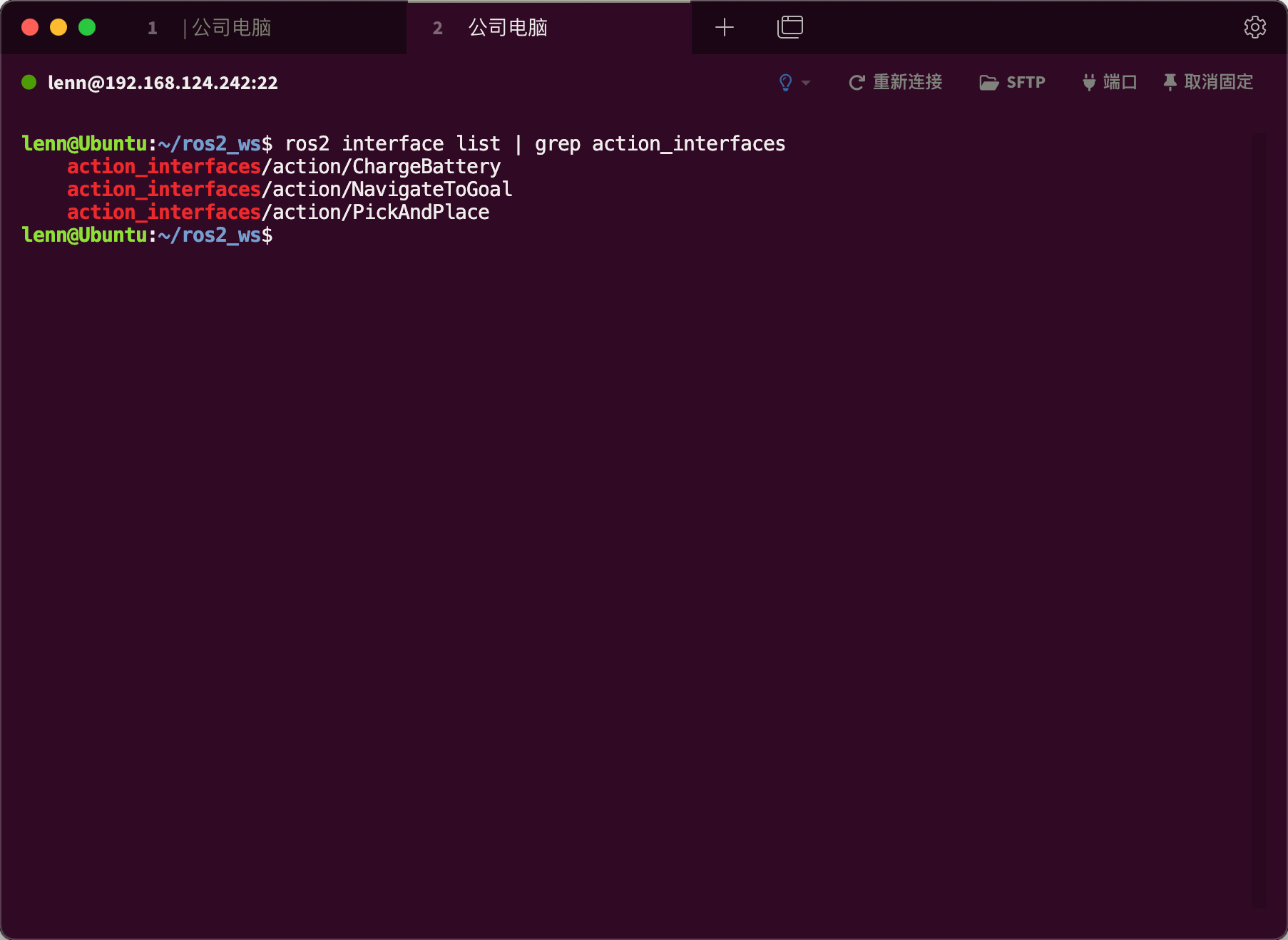
后续需要使用:action_interfaces/action/NavigateToGoal
C++编程方法(使用 NavigateToGoal)
交互逻辑
动作生命周期
创建动作演示功能包
cd ~/ros2_ws/src
# 创建action_demo功能包
ros2 pkg create --build-type ament_cmake action_demo \
--dependencies rclcpp rclcpp_action action_interfaces geometry_msgs tf2 tf2_geometry_msgs
命令解析:
- action_demo
- 作用:新创建的 ROS2 包名称
- 生成:会创建名为 action_demo 的目录
- –dependencies 依赖:
- rclcpp_action
- 用途:ROS2 C++动作系统库
- 提供:动作客户端和服务器的实现
- 功能:处理长时间运行的任务,支持取消和进度反馈
- action_interfaces (即是我们自己创建的动作接口)
- 用途:自定义动作接口包
- 包含:项目特定的.action 文件定义
- 动作:提供 NavigateToGoal、PickAndPlace 等动作接口
- geometry_msgs
- 用途:几何消息类型标准库
- 提供:PoseStamped、Twist、Point、Quaternion 等
- 用途:处理位置、姿态、速度等几何数据
- tf2
- 用途:坐标变换库核心
- 功能:坐标系变换计算和管理
- 作用:处理机器人各部件之间的空间关系
- tf2_geometry_msgs
- 用途:TF2 与 geometry_msgs 的集成
- 功能:为 geometry_msgs 提供坐标变换功能
- 例如:将 PoseStamped 在不同坐标系间转换
动作服务端编程方法
action_demo/src/navigation_action_server.cpp
#include <iostream>
#include <rclcpp/rclcpp.hpp>
// 包含ROS2动作系统的头文件
#include <rclcpp_action/rclcpp_action.hpp>
// 包含自定义导航动作接口的头文件
#include <action_interfaces/action/navigate_to_goal.hpp>
// 包含集合消息类型,用于位置和姿态的表示
#include <geometry_msgs/msg/pose_stamped.hpp>
// 包含TF2四元数类,用于姿态计算
#include <tf2/LinearMath/Quaternion.hpp>
// 包含TF2集合消息转换工具
#include <tf2_geometry_msgs/tf2_geometry_msgs.hpp>
// 包含数学计算函数
#include <cmath>
// 多线程支持
#include <thread>
using NavigateToGoal = action_interfaces::action::NavigateToGoal;
using GoalHandleNavigate = rclcpp_action::ServerGoalHandle<NavigateToGoal>;
class NavigationActionServer : public rclcpp::Node {
public:
NavigationActionServer() : Node("navigation_action_server") {
// 创建动作服务器对象
// 模版参数指定动作类型NavigateToGoal
// navigate_to_goal是动作名称,客户端通过此名称调用动作
// 绑定三个回调函数:目标处理、取消处理、接受处理
action_server_ = rclcpp_action::create_server<NavigateToGoal>(
this,
"navigate_to_goal",
std::bind(&NavigationActionServer::handle_goal, this, std::placeholders::_1, std::placeholders::_2),
std::bind(&NavigationActionServer::handle_cancel, this, std::placeholders::_1),
std::bind(&NavigationActionServer::handle_accept, this, std::placeholders::_1)
);
// 设置坐标系为map,这是ROS导航中的标准全局坐标系
current_pose_.header.frame_id = "map";
current_pose_.pose.position.x = 0.0;
current_pose_.pose.position.y = 0.0;
current_pose_.pose.position.z = 0.0;
current_pose_.pose.orientation.w = 1.0; // 四元数w分量,表示无旋转
RCLCPP_INFO(get_logger(), "navigation service setup");
}
private:
// 动作服务器对象的智能指针,管理导航动作的生命周期
rclcpp_action::Server<NavigateToGoal>::SharedPtr action_server_;
// 当前机器人位置
geometry_msgs::msg::PoseStamped current_pose_;
// 是否接收或拒绝该目标
rclcpp_action::GoalResponse handle_goal(
const rclcpp_action::GoalUUID& uuid, // 目标唯一标识符
std::shared_ptr<const NavigateToGoal::Goal> goal // 客户端发送的导航目标 包含目标位置和最大速度
) {
// 避免未使用变量警告
(void)uuid;
RCLCPP_INFO(get_logger(),
"get navigation target:(%.2f, %.2f), max_speed: %.2f m/s",
goal->target_pose.pose.position.x,
goal->target_pose.pose.position.y,
goal->max_speed);
if (goal->max_speed <= 0 || goal->max_speed > 5.0) {
return rclcpp_action::GoalResponse::REJECT;
}
double distance = calculate_distance(current_pose_, goal->target_pose);
if (distance > 100.0) { // 距离太远
return rclcpp_action::GoalResponse::REJECT;
}
RCLCPP_INFO(get_logger(), "target accepted, begin navigation");
return rclcpp_action::GoalResponse::ACCEPT_AND_EXECUTE; // 触发handle_accepted的调用
}
// 客户端请求取消正在进行的导航任务时,此函数被调用
rclcpp_action::CancelResponse handle_cancel(
const std::shared_ptr<GoalHandleNavigate> goal_handle // 要取消的目标句柄
) {
(void)goal_handle;
RCLCPP_INFO(get_logger(), "get cancel request");
// 接受取消请求(在实际中需要更复杂的逻辑)
return rclcpp_action::CancelResponse::ACCEPT;
}
void handle_accept(
const std::shared_ptr<GoalHandleNavigate> goal_handle // 目标句柄,用于发布反馈和设置结果
) {
RCLCPP_INFO(get_logger(), "get accepted request");
// 新线程中执行导航任务,避免阻塞主线程
// 使用detach()让线程独立运行
std::thread(std::bind(&NavigationActionServer::execute_navigation, this, goal_handle)).detach();
}
void execute_navigation(const std::shared_ptr<GoalHandleNavigate> goal_handle) {
RCLCPP_INFO(get_logger(), "navigation begin");
const auto goal = goal_handle->get_goal();
auto feedback = std::make_shared<NavigateToGoal::Feedback>();
auto result = std::make_shared<NavigateToGoal::Result>();
// 记录任务开始时间
auto start_time = this->now();
// 计算到目标的总距离
double total_distance = calculate_distance(current_pose_, goal->target_pose);
const double update_rate = 10.0;
const double time_step = 1.0 / update_rate; // 时间步长
rclcpp::Rate rate(update_rate);
// 主要导航执行循环
while (rclcpp::ok()) {
// 是否收到取消请求
if (goal_handle->is_canceling()) {
result->success = false;
result->result_message = "navigation canceled";
result->final_distance_to_goal = calculate_distance(current_pose_, goal->target_pose);
result->total_time = this->now() - start_time;
result->final_pose = current_pose_;
// 标记目标取消
goal_handle->canceled(result);
RCLCPP_INFO(this->get_logger(), "navigation canceled");
return;
}
// 模拟机器人向目标移动
move_towards_goal(goal->target_pose, goal->max_speed, time_step);
double remaining_distance = calculate_distance(current_pose_, goal->target_pose);
feedback->current_pose = current_pose_;
feedback->distance_remaining = remaining_distance;
feedback->completion_percentage = ((total_distance - remaining_distance) / total_distance) * 100.0;
feedback->current_speed = goal->max_speed;
feedback->estimated_time_remaining = remaining_distance / goal->max_speed;
feedback->status_message = "navigating...";
goal_handle->publish_feedback(feedback);
RCLCPP_DEBUG(
this->get_logger(),
"current position:(%.2f, %.2f), ramain:%.2f, finish:%.1f%%",
current_pose_.pose.position.x,
current_pose_.pose.position.y,
remaining_distance,
feedback->completion_percentage
);
if (remaining_distance < 0.1) {
result->success = true;
result->result_message = "navigation success";
result->final_distance_to_goal = remaining_distance;
result->total_time = this->now() - start_time;
result->final_pose = current_pose_;
goal_handle->succeed(result);
RCLCPP_INFO(get_logger(), "navigation success, 误差:%.3f, total time:%.2f", remaining_distance,
result->total_time.sec + result->total_time.nanosec * 1e-9);
return;
}
// 等待下一个控制周期
rate.sleep();
}
}
double calculate_distance(
const geometry_msgs::msg::PoseStamped& pose1,
const geometry_msgs::msg::PoseStamped& pose2
) {
double dx = pose2.pose.position.x - pose1.pose.position.x;
double dy = pose2.pose.position.y - pose1.pose.position.y;
return std::sqrt(dx * dx + dy * dy);
}
void move_towards_goal(
const geometry_msgs::msg::PoseStamped& target,
double max_speed,
double time_step
) {
double dx = target.pose.position.x - current_pose_.pose.position.x;
double dy = target.pose.position.y - current_pose_.pose.position.y;
double distance = std::sqrt(dx * dx * dy * dy);
if (distance > 0) {
double move_distance = std::min(max_speed * time_step, distance);
double ratio = move_distance / distance;
// 更新位置
current_pose_.pose.position.x += dx * ratio;
current_pose_.pose.position.y += dy * ratio;
current_pose_.header.stamp = this->now();
// 更新朝向
double yaw = std::atan2(dy, dx); // 计算偏航角
tf2::Quaternion q;
q.setRPY(0, 0, yaw); // 设置Roll-Pitch-Yaw角度
current_pose_.pose.orientation = tf2::toMsg(q); // 转化为消息格式
}
}
};
int main(int argc, char* argv[]) {
rclcpp::init(argc, argv);
auto node = std::make_shared<NavigationActionServer>();
rclcpp::spin(std::make_shared<NavigationActionServer>());
rclcpp::spin(node);
rclcpp::shutdown();
return 0;
}
动作客户端编程方法
action_demo/src/navigation_action_client.cpp
#include <iostream>
#include <rclcpp/rclcpp.hpp>
#include <rclcpp_action/rclcpp_action.hpp>
#include <action_interfaces/action/navigate_to_goal.hpp>
#include <geometry_msgs/msg/pose_stamped.h>
#include <chrono>
using namespace std::chrono_literals;
using NavigateToGoal = action_interfaces::action::NavigateToGoal;
using GoalHandleNavigate = rclcpp_action::ClientGoalHandle<NavigateToGoal>;
class NavigationActionClient : public rclcpp::Node {
public:
NavigationActionClient() : Node("navigation_action_client") {
action_client_ = rclcpp_action::create_client<NavigateToGoal>(this, "navigate_to_goal");
// 等待动作服务可用,超时时间10s
if (!action_client_->wait_for_action_server(10s)) {
RCLCPP_ERROR(get_logger(), "action serviec unline");
return;
}
RCLCPP_INFO(get_logger(), "navigation client setup");
// 开始测试导航功能
send_navigation_goals();
}
private:
rclcpp_action::Client<NavigateToGoal>::SharedPtr action_client_;
// 发送多个导航目标
// 定义一系列导航点,按顺序发给导航服务器,m模拟机器人按预定路径移动
void send_navigation_goals() {
std::vector<std::pair<double, double>> waypoints = {
{3.0, 2.0},
{5.0, 5.0},
{1.0, 4.0},
{0.0, 0.0}
};
for (const auto& waypoint : waypoints) {
send_goal(waypoint.first, waypoint.second, 1.5);
std::this_thread::sleep_for(2s);
}
}
void send_goal(double x, double y, double max_speed) {
auto goal_msg = NavigateToGoal::Goal();
goal_msg.target_pose.header.stamp = this->now(); // 时间戳设置为当前时间
goal_msg.target_pose.header.frame_id = "map"; // 设置坐标系为地图坐标系
goal_msg.target_pose.pose.position.x = x;
goal_msg.target_pose.pose.position.y = y;
goal_msg.target_pose.pose.position.z = 0.0;
goal_msg.target_pose.pose.orientation.w = 1.0;
goal_msg.max_speed = max_speed;
goal_msg.use_path_planning = true;
goal_msg.planning_algorithm = "A_star"; // A*算法
RCLCPP_INFO(get_logger(), "send navigation target:(%.2f, %.2f), max_speed:%.2f m/s", x, y, max_speed);
auto send_goal_options = rclcpp_action::Client<NavigateToGoal>::SendGoalOptions();
send_goal_options.goal_response_callback = std::bind(&NavigationActionClient::goal_response_callback, this,
std::placeholders::_1);
send_goal_options.feedback_callback = std::bind(&NavigationActionClient::feedback_callback, this,
std::placeholders::_1, std::placeholders::_2);
send_goal_options.result_callback = std::bind(&NavigationActionClient::result_callback, this,
std::placeholders::_1);
auto goal_handle_future = action_client_->async_send_goal(goal_msg, send_goal_options);
}
// 当服务器响应目标请求时调用,判断目标是否接受
void goal_response_callback(const GoalHandleNavigate::SharedPtr& goal_handle) {
if (!goal_handle) {
RCLCPP_ERROR(get_logger(), "target refused");
}
else {
RCLCPP_INFO(get_logger(), "target accepted, begin...");
}
}
void feedback_callback(
GoalHandleNavigate::SharedPtr,
const std::shared_ptr<const NavigateToGoal::Feedback> feedback
) {
RCLCPP_INFO(get_logger(), "navigation resp: position(%.2f, %.2f), remaining:%.2f,finished:%.2f, state:%s",
feedback->current_pose.pose.position.x,
feedback->current_pose.pose.position.y,
feedback->distance_remaining,
feedback->completion_percentage,
feedback->status_message.c_str());
}
void result_callback(const GoalHandleNavigate::WrappedResult& result) {
switch (result.code)
{
case rclcpp_action::ResultCode::SUCCEEDED:
RCLCPP_INFO(get_logger(), "navigation success:%s, distance:%.3f, total time:%.2f",
result.result->result_message.c_str(),
result.result->final_distance_to_goal,
result.result->total_time.sec + result.result->total_time.nanosec * 1e-9);
break;
case rclcpp_action::ResultCode::ABORTED:
RCLCPP_ERROR(get_logger(), "navigation stoped:%s", result.result->result_message.c_str());
break;
case rclcpp_action::ResultCode::CANCELED:
RCLCPP_WARN(get_logger(), "navigation cancel:%s", result.result->result_message.c_str());
break;
default:
RCLCPP_ERROR(get_logger(), "unexcept code");
break;
}
}
public:
// 取消当前目标的公共方法
// 提供给外部调用的接口,用于取消当前正在执行的目标,这在紧急情况或用户干预时非常有用
void cancel_current_goal() {
RCLCPP_INFO(get_logger(), "cancel current navigation target");
// 异步取消所有正在执行的目标
auto cancel_future = action_client_->async_cancel_all_goals();
}
};
int main(int argc, char* argv[]) {
rclcpp::init(argc, argv);
auto node = std::make_shared<NavigationActionClient>();
rclcpp::spin(node);
rclcpp::shutdown();
return 0;
}
编译配置
CMakeLists.txt
cmake_minimum_required(VERSION 3.8)
project(action_demo)
if(CMAKE_COMPILER_IS_GNUCXX OR CMAKE_CXX_COMPILER_ID MATCHES "Clang")
add_compile_options(-Wall -Wextra -Wpedantic)
endif()
# find dependencies
find_package(ament_cmake REQUIRED)
find_package(rclcpp REQUIRED)
find_package(rclcpp_action REQUIRED)
find_package(action_interfaces REQUIRED)
find_package(geometry_msgs REQUIRED)
find_package(tf2 REQUIRED)
find_package(tf2_geometry_msgs REQUIRED)
if(BUILD_TESTING)
find_package(ament_lint_auto REQUIRED)
# the following line skips the linter which checks for copyrights
# comment the line when a copyright and license is added to all source files
set(ament_cmake_copyright_FOUND TRUE)
# the following line skips cpplint (only works in a git repo)
# comment the line when this package is in a git repo and when
# a copyright and license is added to all source files
set(ament_cmake_cpplint_FOUND TRUE)
ament_lint_auto_find_test_dependencies()
endif()
add_executable(navigation_action_server src/navigation_action_server.cpp)
add_executable(navigation_action_client src/navigation_action_client.cpp)
ament_target_dependencies(
navigation_action_server
rclcpp
rclcpp_action
action_interfaces
geometry_msgs
tf2
tf2_geometry_msgs
)
ament_target_dependencies(
navigation_action_client
rclcpp
rclcpp_action
action_interfaces
geometry_msgs
tf2
tf2_geometry_msgs
)
install(
TARGETS
navigation_action_client
navigation_action_server
DESTINATION
lib/${PROJECT_NAME}
)
ament_package()
编译和运行
cd ~/ros2_ws
colcon build --packages-select action_interfaces action_demo
source install/setup.bash
ros2 run action_demo navigation_action_server
ros2 run action_demo navigation_action_client
动作的命令行操作
动作命令行操作
# 查看可用动作
ros2 action list
# 查看动作接口定义
ros2 interface show acton_interfaces/action/NavigateToGoal
# 发送动作目标
ros2 action send_goal /navigate_to_goal action_interfaces/action/NavigateToGoal \
'{target_pose:{header: {frame_id: "map"}, pose: {position: {x: 5.0, y: 3.0}}}, max_speed: 2.0}' \
--feedback
# 查看动作信息
ros2 action info /navigate_to_goal
# 监听动作反馈
ros2 topic echo /navigate_to_goal/_action/feedback
# 监听动作状态
ros2 topic echo /navigate_to_goal/_action/status
# 使用rqt图形界面
rqt_action #动作监控器
动作调试和监控
# 查看动作服务端
ros2 node info /navigation_action_server
# 查看动作相关话题
ros2 topic list | grep navigate_to_goal
# 查看动作相关服务
ros2 service list | grep navigate_to_goal
# 实时监控动作执行
ros2 topic echo /navigate_to_goal/_action/feedback --once
通信接口
什么是通信接口
定义和概念
- 通信接口: 定义 ROS2 节点间数据传输格式的标准结构
- 作用: 确保不同节点间数据交换的一致性和兼容性
- 类型: 消息(.msg)、服务(.srv)、动作(.action)
ROS2 通信接口体系结构图
接口数据类型层次结构
通信接口的定义方法
创建接口功能包
cd ~/ros2_ws/src
ros2 pkg create --build-type ament_cmake my_interfaces \
--dependencies rosidl_default_generators rosidl_default_runtime
消息接口(.msg)定义
基础消息定义
msg/RobotStatus.msg:
# 机器人状态消息
# 基本数据类型
bool is_enabled
int32 battery_level
float64 speed
string current_mode
# 时间戳
builtin_interfaces/Time timestamp
# 数组类型
float64[] joint_positions
string[5] sensor_names
# 嵌套消息类型
geometry_msgs/Point position
geometry_msgs/Quaternion orientation
复杂消息定义
msg/SensorData.msg:
# 传感器数据集合
std_msgs/Header header
# 传感器信息
string sensor_id
string sensor_type
bool is_active
# 测量数据
float64 temperature
float64 humidity
float64 pressure
# 位置信息
float64[] raw_data
uint8[] status_flags
# 可选字段(使用常量)
uint8 STATUS_OK = 0
uint8 STATUS_WARNING = 1
uint8 STATUS_ERROR = 2
uint8 current_status
服务接口(.srv)定义
基础服务定义
srv/SetRobotMode.srv:
# 请求部分
string mode_name
bool enable_safety
float64 max_speed
---
# 响应部分
bool success
string message
string previous_mode
float64 actual_speed
复杂服务定义
srv/NavigationRequest.srv:
# 导航请求服务
# 请求部分
geometry_msgs/PoseStamped start_pose
geometry_msgs/PoseStamped goal_pose
string planning_algorithm
float64 max_planning_time
bool use_obstacles
string[] obstacle_types
---
# 响应部分
bool success
string result_message
nav_msgs/Path planned_path
float64 path_length
float64 estimated_time
geometry_msgs/PoseStamped[] waypoints
文件操作服务
srv/FileOperation.srv:
# 文件操作服务
# 请求服务
string operation_type # read write delete
string file_path
string file_content # 写操作
---
# 响应部分
bool success
string message
string file_content # 读操作
int64 file_size
builtin_interfaces/Time last_modified
动作接口(.action)定义
基础动作定义
action/NavigateToGoal.action
# 目标定义
geometry_msgs/PoseStamped target_pose
float64 max_speed
bool use_path_planning
---
# 结果定义
bool success
string result_message
float64 final_distance_to_goal
builtin_interfaces/Duration total_time
---
# 反馈定义
geometry_msgs/PoseStamped current_pose
float64 distance_remaining
float64 estimated_time_remaining
float64 current_speed
复杂动作定义
action/ProcessData.action
# 数据处理动作
# 目标定义
string[] input_files
string processing_type
int32 batch_size
bool save_intermediate_results
---
# 结果定义
bool success
string result_message
string[] output_files
int32 processed_items
float64 processing_time
string[] error_logs
---
# 反馈定义
int32 current_item
int32 total_items
float64 completion_percentage
string current_file
builtin_interfaces/Duration elapsed_time
string status_message
编译配置
CMakeLists.txt
cmake_minimum_required(VERSION 3.8)
project(my_interfaces)
if(CMAKE_COMPILER_IS_GNUCXX OR CMAKE_CXX_COMPILER_ID MATCHES "Clang")
add_compile_options(-Wall -Wextra -Wpedantic)
endif()
# find dependencies
find_package(ament_cmake REQUIRED)
find_package(rosidl_default_generators REQUIRED)
find_package(rosidl_default_runtime REQUIRED)
find_package(std_msgs REQUIRED)
find_package(geometry_msgs REQUIRED)
find_package(sensor_msgs REQUIRED)
find_package(nav_msgs REQUIRED)
find_package(builtin_interfaces REQUIRED)
if(BUILD_TESTING)
find_package(ament_lint_auto REQUIRED)
# the following line skips the linter which checks for copyrights
# comment the line when a copyright and license is added to all source files
set(ament_cmake_copyright_FOUND TRUE)
# the following line skips cpplint (only works in a git repo)
# comment the line when this package is in a git repo and when
# a copyright and license is added to all source files
set(ament_cmake_cpplint_FOUND TRUE)
ament_lint_auto_find_test_dependencies()
endif()
rosidl_generate_interfaces(
${PROJECT_NAME}
"msg/RobotStatus.msg"
"msg/SensorData.msg"
"srv/FileOperation.srv"
"srv/NavigationRequest.srv"
"srv/SetRobotMode.srv"
"action/NavigateToGoal.action"
"action/ProcessData.action"
DEPENDENCIES
std_msgs
geometry_msgs
sensor_msgs
nav_msgs
builtin_interfaces
)
ament_export_dependencies(rosidl_default_runtime)
ament_package()
package.xml
<?xml version="1.0"?>
<?xml-model href="http://download.ros.org/schema/package_format3.xsd" schematypens="http://www.w3.org/2001/XMLSchema"?>
<package format="3">
<name>my_interfaces</name>
<version>0.0.0</version>
<description>TODO: Package description</description>
<maintainer email="lennlouis@163.com">lenn</maintainer>
<license>TODO: License declaration</license>
<buildtool_depend>ament_cmake</buildtool_depend>
<depend>rosidl_default_generators</depend>
<depend>rosidl_default_runtime</depend>
<depend>std_msgs</depend>
<depend>geometry_msgs</depend>
<depend>sensor_msgs</depend>
<depend>nav_msgs</depend>
<depend>builtin_interfaces</depend>
<member_of_group>rosidl_interface_packages</member_of_group>
<test_depend>ament_lint_auto</test_depend>
<test_depend>ament_lint_common</test_depend>
<export>
<build_type>ament_cmake</build_type>
</export>
</package>
通信接口命令行操作
编译和验证接口
cd ~/ros2_ws
colcon build --packages-select my_interfaces
source install/setup.bash
ros2 interface list | grep my_interfaces
查看接口信息
# 查看所有接口
ros2 interface list
# 查看特定包的接口
ros2 interface package my_interfaces
# 查看消息接口详情
ros2 interface show my_interfaces/msg/RobotStatus
ros2 interface show my_interfaces/msg/SensorData
# 查看服务接口详情
ros2 interface show my_interfaces/srv/SetRobotMode
ros2 interface show my_interfaces/srv/NavigationRequest
# 查看动作接口详情
ros2 interface show my_interfaces/action/NavigateToGoal
ros2 interface show my_interfaces/action/ProcessData
接口类型查询
# 查看标准消息类型
ros2 interface show std_msgs/msg/String
ros2 interface show geometry_msgs/msg/Twist
ros2 interface show sensor_msgs/msg/LaserScan
# 查看标准服务类型
ros2 interface show std_srvs/srv/SetBool
ros2 interface show std_srvs/srv/Trigger
# 搜索包含特定关键字的接口
ros2 interface list | grep -i navigation
ros2 interface list | grep -i sensor
使用接口进行通信测试
source install/setup.bash
# 使用自定义消息发布话题
ros2 topic pub /robot_status my_interfaces/msg/RobotStatus \
'{is_enabled: true, battery_level: 85, speed: 1.5, current_mode: "navigation"}'
# 调用自定义服务
ros2 service call /set_robot_mode my_interfaces/srv/SetRobotMode \
'{mode_name: "autonomous", enable_safety: true, max_speed: 2.0}'
# 使用rqt图形界面
rqt_msg
rqt_srv
C++服务接口应用示例
创建使用自定义接口的功能包
cd ~/ros2_ws/src
ros2 pkg create --build-type ament_cmake interface_demo \
--dependencies rclcpp my_interfaces
服务端实现实例
src/robot_mode_server.cpp
// #include <rclcpp/rclcpp.hpp>
// #include <my_interfaces/srv/set_robot_mode.hpp>
// #include <memory>
// #include <string>
#include <iostream>
#include <rclcpp/rclcpp.hpp>
#include <my_interfaces/srv/set_robot_mode.hpp>
class RobotModeServer : public rclcpp::Node {
public:
RobotModeServer() : Node("robot_mode_server"), current_mode_("manual"), max_speed_(1.0){
service_ = create_service<my_interfaces::srv::SetRobotMode>(
"set_robot_mode",
std::bind(&RobotModeServer::handle_set_mode, this, std::placeholders::_1, std::placeholders::_2));
RCLCPP_INFO(get_logger(), "robot mode server start");
RCLCPP_INFO(get_logger(), "mode: %s, max_speed: %.2f m/s", current_mode_.c_str(), max_speed_);
}
private:
void handle_set_mode(
const std::shared_ptr<my_interfaces::srv::SetRobotMode::Request> request,
std::shared_ptr<my_interfaces::srv::SetRobotMode::Response> response
) {
RCLCPP_INFO(get_logger(), "get request: %s, enable_safety: %s, max_speed: %.2f",
request->mode_name.c_str(),
request->enable_safety ? "true" : "false",
request->max_speed);
response->previous_mode = current_mode_;
// 验证请求参数
if (request->mode_name.empty()) {
response->success = false;
response->message = "模式名称不能为空";
response->actual_speed = max_speed_;
return;
}
if (request->max_speed <= 0 || request->max_speed > 5.0) {
response->success = false;
response->message = "无效的最大速度,应在 0-5.0 m/s 范围内";
response->actual_speed = max_speed_;
return;
}
std::vector<std::string> supported_modes = {
"manual", "autonomous", "navigation", "teleoperation"
};
if (std::find(supported_modes.begin(), supported_modes.end(), request->mode_name) == supported_modes.end()) {
response->success = false;
response->message = "unexcepted mode:" + request->mode_name;
response->actual_speed = max_speed_;
return;
}
current_mode_ = request->mode_name;
if (request->enable_safety) {
max_speed_ = std::min(request->max_speed, 2.0);
}
else {
max_speed_ = request->max_speed;
}
response->success = true;
response->message = "set mode success:" + current_mode_;
response->actual_speed = max_speed_;
RCLCPP_INFO(
get_logger(),
"mode changed: %s -> %s, max_speed: %.2f m/s",
response->previous_mode.c_str(),
current_mode_.c_str(),
max_speed_
);
}
rclcpp::Service<my_interfaces::srv::SetRobotMode>::SharedPtr service_;
std::string current_mode_;
double max_speed_;
};
int main(int argc, char* argv[]) {
rclcpp::init(argc, argv);
rclcpp::spin(std::make_shared<RobotModeServer>());
rclcpp::shutdown();
return 0;
}
客户端实现实例
src/robot_mode_client.cpp
#include <iostream>
#include <rclcpp/rclcpp.hpp>
#include <my_interfaces/srv/set_robot_mode.hpp>
#include <memory>
#include <chrono>
using namespace std::chrono_literals;
class RobotModeClient : public rclcpp::Node {
public:
RobotModeClient() : Node("robot_mode_client") {
client_ = create_client<my_interfaces::srv::SetRobotMode>("set_robot_mode");
while(!client_->wait_for_service(1s)) {
if (!rclcpp::ok()) {
RCLCPP_ERROR(get_logger(), "service break...");
return;
}
RCLCPP_INFO(get_logger(), "wait for set_robot_mode server...");
}
RCLCPP_INFO(get_logger(), "robot_mode_client start");
send_mode_settings();
}
private:
void send_mode_settings() {
// std::vector<std::string> supported_modes = {
// "manual", "autonomous", "navigation", "teleoperation"
// };
set_robot_mode("autonomous", true, 1.5);
std::this_thread::sleep_for(2s);
set_robot_mode("manual", false, 3.0);
std::this_thread::sleep_for(2s);
set_robot_mode("navigation", true, 4.0);
// 测试4: 无效模式测试
set_robot_mode("invalid_mode", true, 2.0);
std::this_thread::sleep_for(2s);
// 测试5: 无效速度测试
set_robot_mode("manual", true, 10.0);
}
void set_robot_mode(const std::string& mode_name, bool enable_safety, double max_speed) {
auto request = std::make_shared<my_interfaces::srv::SetRobotMode::Request>();
request->mode_name = mode_name;
request->max_speed = max_speed;
request->enable_safety = enable_safety;
auto future = client_->async_send_request(request);
if (rclcpp::spin_until_future_complete(get_node_base_interface(), future) == rclcpp::FutureReturnCode::SUCCESS) {
auto response = future.get();
if (response->success) {
RCLCPP_INFO(get_logger(),
"set mode success: %s, previous: %s, speed: %.2f",
response->message.c_str(), response->previous_mode.c_str(), response->actual_speed);
}
else {
RCLCPP_WARN(get_logger(),
"set mode failed: %s, speed: %.2f",
response->message.c_str(), response->actual_speed);
}
}
else {
RCLCPP_ERROR(get_logger(), "service failed");
}
}
rclcpp::Client<my_interfaces::srv::SetRobotMode>::SharedPtr client_;
};
int main(int argc, char* argv[]) {
rclcpp::init(argc, argv);
auto node = std::make_shared<RobotModeClient>();
// rclcpp::spin(std::make_shared<RobotModeClient>());
rclcpp::shutdown();
return 0;
}
编译配置
CMakeLists.txt
cmake_minimum_required(VERSION 3.8)
project(my_interfaces)
if(CMAKE_COMPILER_IS_GNUCXX OR CMAKE_CXX_COMPILER_ID MATCHES "Clang")
add_compile_options(-Wall -Wextra -Wpedantic)
endif()
# find dependencies
find_package(ament_cmake REQUIRED)
find_package(rosidl_default_generators REQUIRED)
find_package(rosidl_default_runtime REQUIRED)
find_package(std_msgs REQUIRED)
find_package(geometry_msgs REQUIRED)
find_package(sensor_msgs REQUIRED)
find_package(nav_msgs REQUIRED)
find_package(builtin_interfaces REQUIRED)
if(BUILD_TESTING)
find_package(ament_lint_auto REQUIRED)
# the following line skips the linter which checks for copyrights
# comment the line when a copyright and license is added to all source files
set(ament_cmake_copyright_FOUND TRUE)
# the following line skips cpplint (only works in a git repo)
# comment the line when this package is in a git repo and when
# a copyright and license is added to all source files
set(ament_cmake_cpplint_FOUND TRUE)
ament_lint_auto_find_test_dependencies()
endif()
rosidl_generate_interfaces(
${PROJECT_NAME}
"msg/RobotStatus.msg"
"msg/SensorData.msg"
"srv/FileOperation.srv"
"srv/NavigationRequest.srv"
"srv/SetRobotMode.srv"
"action/NavigateToGoal.action"
"action/ProcessData.action"
DEPENDENCIES
std_msgs
geometry_msgs
sensor_msgs
nav_msgs
builtin_interfaces
)
ament_export_dependencies(rosidl_default_runtime)
ament_package()
参数
参数是什么
定义和概念
- 参数: ROS2 中用于配置节点行为的键值对系统
- 特点: 动态可配置、类型安全、支持运行时修改
- 作用: 作为机器人系统的全局字典,存储配置信息
ROS2 参数系统概念图
参数在机器人系统中的作用
参数通信模式
参数服务架构图
参数操作时序图
参数生命周期图
参数 C++编程方法
创建参数演示功能包
cd ~/ros2_ws/src
ros2 pkg create --build-type ament_cmake parameter_demo \
--dependencies rclcpp rcl_interfaces # ROS2的核心接口包(包含参数相关接口)
基础参数使用示例
src/basic_parameter_node.cpp
#include <iostream>
#include <rclcpp/rclcpp.hpp>
#include <rcl_interfaces/msg/parameter_descriptor.hpp> // 参数描述符类型
#include <rcl_interfaces/msg/parameter_event.hpp> // 参数事件类型
#include <string>
#include <memory>
#include <chrono>
using namespace std::chrono_literals;
class BasicParameterNode : public rclcpp::Node {
public:
BasicParameterNode() : Node("basic_parameter_node") {
// 所有要使用的参数必须先声明
declare_basic_parameters();
// 读取参数初始化成员变量
get_parameters();
setup_parameter_callback();
timer_ = create_wall_timer(
5s,
std::bind(&BasicParameterNode::timer_callback, this)
);
}
private:
void declare_basic_parameters() {
// 布尔参数 - 控制是否开启调试模式
auto bool_desc = rcl_interfaces::msg::ParameterDescriptor();
bool_desc.description = "是否启用调试模式";
this->declare_parameter("debug_mode", false, bool_desc);
// 整数参数 - 设置循环频率,带有范围约束
auto int_desc = rcl_interfaces::msg::ParameterDescriptor();
int_desc.description = "循环频率(Hz)";
int_desc.integer_range.resize(1);
int_desc.integer_range[0].from_value = 1;
int_desc.integer_range[0].to_value = 100;
declare_parameter("loop_rate", 10, int_desc);
// 浮点参数 - 设置最大速度,带有范围约束
auto double_desc = rcl_interfaces::msg::ParameterDescriptor();
double_desc.description = "最大速度(m/s)";
double_desc.floating_point_range.resize(1);
double_desc.floating_point_range[0].from_value = 0.0;
double_desc.floating_point_range[0].to_value = 5.0;
declare_parameter("max_speed", 1.0, double_desc);
// 字符串参数 - 设置机器人名称
auto string_desc = rcl_interfaces::msg::ParameterDescriptor();
string_desc.description = "机器人名称";
declare_parameter("robot_name", std::string("robot1"), string_desc);
// 数组参数 - 设置关节位置数组(6自由度机械臂)
auto array_desc = rcl_interfaces::msg::ParameterDescriptor();
array_desc.description = "关节位置数组";
std::vector<double> default_joints = {0.0, 0.0, 0.0, 0.0, 0.0, 0.0};
declare_parameter("joint_positions", default_joints, array_desc);
// 字符串数组参数 - 设置传感器名称表
auto string_array_desc = rcl_interfaces::msg::ParameterDescriptor();
string_array_desc.description = "传感器名称表";
// 默认传感器列表
std::vector<std::string> default_sensors = {"camera", "lidar", "imu"};
declare_parameter("sensor_names", default_sensors, string_array_desc);
}
void get_parameters() {
debug_mode_ = get_parameter("debug_mode_").as_bool();
loop_rate_ = get_parameter("loop_rate").as_int();
max_speed_ = get_parameter("max_speed").as_double();
robot_name_ = get_parameter("robot_name").as_string();
joint_positions_ = get_parameter("joint_positions").as_double_array();
sensor_names_ = get_parameter("sensor_names").as_string_array();
display_parameters();
}
void setup_parameter_callback() {
parameter_callback_handle_ = add_on_set_parameters_callback(
std::bind(&BasicParameterNode::on_parameter_change, this, std::placeholders::_1)
);
}
// 验证参数是否合法,更新成员变量,记录参数变更日志,返回操作结果
rcl_interfaces::msg::SetParametersResult on_parameter_change(const std::vector<rclcpp::Parameter>& parameters) {
rcl_interfaces::msg::SetParametersResult result;
result.successful = true; // 默认设置成功
for (auto& param : parameters) {
if (param.get_name() == "debug_mode") {
debug_mode_ = param.as_bool();
}
if (param.get_name() == "loop_rate") {
int new_rate = param.as_int();
if (new_rate >= 1 && new_rate <= 100) {
loop_rate_ = new_rate;
}
else {
result.successful = false;
}
}
if (param.get_name() == "max_speed") {
double new_speed = param.as_double();
if (new_speed >=0.0 && new_speed <= 5.0) {
max_speed_ = new_speed;
}
else {
result.successful = false;
}
}
if (param.get_name() == "robot_name") {
robot_name_ = param.as_string();
}
if (param.get_name() == "joint_positions") {
joint_positions_ = param.as_double_array();
}
if (param.get_name() == "sensor_names") {
sensor_names_ = param.as_string_array();
}
}
return result;
}
void timer_callback() {
if (debug_mode_) {
display_parameters();
}
}
void display_parameters() {
RCLCPP_INFO(get_logger(), "=====current parameters=====");
RCLCPP_INFO(get_logger(), "debug_mode: %s", debug_mode_ ? "enable" : "disable");
RCLCPP_INFO(get_logger(), "loop_rate: %d Hz", loop_rate_);
RCLCPP_INFO(get_logger(), "max_speed: %.2f m/s", max_speed_);
RCLCPP_INFO(get_logger(), "robot_name: %s", robot_name_.c_str());
std::string joints_str = "joint:[";
for (size_t i = 0; i < joint_positions_.size(); i++) {
joints_str += std::to_string(joint_positions_[i]);
if (i < joint_positions_.size() - 1) {
joints_str += ",";
}
}
joints_str += "]";
RCLCPP_INFO(get_logger(), "%s", joints_str.c_str());
std::string sensors_str = "sensor:[";
for (size_t i = 0; i < sensor_names_.size(); i++) {
sensors_str += sensor_names_[i];
if (i < sensor_names_.size() - 1) {
sensors_str += ",";
}
}
sensors_str += "]";
RCLCPP_INFO(get_logger(), "%s", sensors_str.c_str());
}
// ROS2 相关对象
rclcpp::TimerBase::SharedPtr timer_;
// 参数回调句柄
rclcpp::node_interfaces::OnSetParametersCallbackHandle::SharedPtr parameter_callback_handle_;
bool debug_mode_;
int loop_rate_;
double max_speed_;
std::string robot_name_;
std::vector<double> joint_positions_;
std::vector<std::string> sensor_names_;
};
int main(int argc, char* argv[]) {
rclcpp::init(argc, argv);
auto node = std::make_shared<BasicParameterNode>();
rclcpp::spin(node);
rclcpp::shutdown();
return 0;
}
高级参数管理示例
本示例演示了ROS2中参数系统的高级使用方法,包括:
- 参数组的组织和管理
- 从YAML配置文件加载参数
- 参数验证和约束检查
- 参数事件监听和响应
- 参数的保存和导出功能
- 嵌套参数结构的处理
- 复杂参数系统的架构设计
src/advanced_parameter_node.cpp
数据分发服务DDS
DDS是什么
- DDS(Data Distribution Service): 数据分发服务,是ROS2的底层通信中间件
- 作用:提供高性能、实时、可靠的分布式数据通信
- 标准: 基于OMG DDS规范,支持发布-订阅模式
ROS2系统架构分层图
DDS在机器人系统中的通信场景
不局限以上场景。
DDS通信模式 DDS Communication Models
点对点模式 Peer-to-Peer Model
Broker模式 Broker Model
广播模式 Broadcast Model
数据中心模式 Data-Centric Model
质量服务策略 Quality of Service-QoS
QoS策略概览图
QoS策略应用场景
命令行中配置DDS的QoS
创建QoS配置文件
config/qos_profiles.yaml
qos_profile_sensor_data:
history: keep_last
depth: 5
reliability: best_effort
durability: volatile
deadline:
sec: 0
nsec: 100000000 # 100ms
lifespan:
sec: 1
nsec: 0
liveliness: automatic
liveliness_lease_duration:
sec: 3
nsec: 0
qos_profile_control_commands:
history: keep_last
depth: 1
reliability: reliable
durability: volatile
deadline:
sec: 0
nsec: 50000000
lifespan:
sec: 0
nsec: 500000000
liveliness: automatic
liveliness_lease_duration:
sec: 1
nsec: 0
qos_profile_system_config:
history: keep_last
depth: 1
reliability: reliable
durability: transient_local
deadline:
sec: 2147483647
nsec: 999999999
lifespan:
sec: 2147483647
nsec: 999999999 # 无限制
liveliness: automatic
liveliness_lease_duration:
sec: 10
nsec: 0
qos_profile_diagnostics:
history: keep_last
depth: 50
reliability: reliable
durability: volatile
deadline:
sec: 5
nsec: 0
lifespan:
sec: 30
nsec: 0
liveliness: manual_by_topic
liveliness_lease_duration:
sec: 10
nsec: 0
命令行QoS操作
# 查看话题的QoS设置
ros2 topic info /scan --verbose
ros2 topic info /cmd_vel --verbose
# 使用特定QoS发布消息
ros2 topic pub /test_topic std_msgs/msg/String \
'{data: "test message"}' \
--qos-reliability reliable \
--qos-durability transient_local \
--qos-history keep_last \
--qos-depth 10
# 查看QoS兼容性
ros2 topic info /scan --verbose | grep QoS
# 使用QoS配置文件启动节点
ros2 run my_package my_node --ros-args \
--params-file config/qos_profiles.yaml
# 监控QoS匹配状态
ros2 doctor --report | grep -i qos
# 设置DDS详细日志
export RCUTILS_LOGGING_SERVERITY=DEBUG
export RMW_IMPLEMENTATION=rmw_fastrtps_cpp
export FASTRTPS_DEFAULT_PROFILES_FILE=config/dds_profiles.xml
参考资料:https://github.com/0voice

有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐

 27
27 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)