基于STM32的多灾种综合预警系统设计
本文设计了一种基于STM32F407的多灾种监测预警系统,集成振动、倾斜、土壤湿度、风速、烟雾等多类传感器,实现对地质灾害、气象灾害和火灾的综合监测。系统采用模块化设计,通过OLED实时显示数据,当监测值超阈值时触发本地声光报警,并通过4G模块将数据上传至云平台。测试表明系统响应迅速、运行稳定,具备灾害早期预警能力。未来可扩展GPS定位、太阳能供电和AI算法优化等功能,提升系统的实用性和智能化水平
若该文为原创文章,转载请注明原文出处。
摘要: 本文设计并实现了一种以STM32F407单片机为核心的多灾种(地质灾害、气象灾害、火灾)综合监测与预警系统。系统集成了振动传感器(SW-420)、三轴加速度传感器(MPU6050)、土壤湿度传感器、风速风向传感器、烟雾传感器(MQ-2)和火焰传感器,实现了对多种灾害前兆信号的实时采集。通过OLED显示屏进行本地数据可视化,并通过4G Cat.1模块(EC200N)将数据可靠地传输至云平台,实现远程监控与预警。当任何传感器数据超过预设阈值时,系统会触发本地声光报警。测试结果表明,该系统集成度高、响应迅速、运行稳定,能够为灾害早期预警提供有效的数据支持。
关键词: STM32;灾害预警;传感器融合;4G Cat.1;物联网;多灾种监测
一、引言
(一)研究背景及意义
全球范围内,地震、滑坡、山洪、森林火灾等自然灾害频发,严重威胁人民生命财产安全。传统的单一灾种监测系统存在成本高、覆盖范围有限等缺点。随着传感器技术、嵌入式系统和物联网技术的发展,构建低成本、多功能、实时联网的综合灾害预警系统成为可能。此类系统能够布设在关键隐患点,7x24小时不间断工作,通过捕捉灾害发生前的物理、化学异常信号,为人员疏散和灾害防治争取宝贵时间,具有重大的社会和经济意义。
(二)国内外研究现状
国内外在灾害监测领域已有诸多研究和应用。国外如日本、美国建立了先进的地震预警系统(EEW)。国内也建立了大量的专业监测台网,但多为分灾种、大型化的专业设备。目前,基于微机电系统(MEMS)传感器和物联网技术的低成本、一体化综合监测站已成为研究热点。本设计旨在这一方向进行实践,集成多种常见灾害的监测手段,提供一个可部署的嵌入式解决方案。
二、系统总体设计
(一)系统架构
系统采用“感知-决策-执行-上传”的闭环架构。
-
感知层: 由各类灾害监测传感器组成,负责采集环境原始数据。
-
控制层: STM32作为核心,负责数据读取、滤波、融合、判断。
-
执行层: 本地报警装置(蜂鸣器、LED)和通信模块。
-
平台层: 云平台与手机APP,负责数据存储、可视化、远程告警推送。
(二)功能模块划分
-
地质灾害监测模块: 振动、倾角、土壤湿度。
-
气象灾害监测模块: 风速、风向。
-
火灾监测模块: 烟雾、火焰。
-
核心控制模块: STM32F407。
-
人机交互模块: OLED显示、按键。
-
通信模块: 4G Cat.1模块。
-
报警模块: 蜂鸣器、LED指示灯。
三、硬件设计与实现
(一)系统硬件框架图
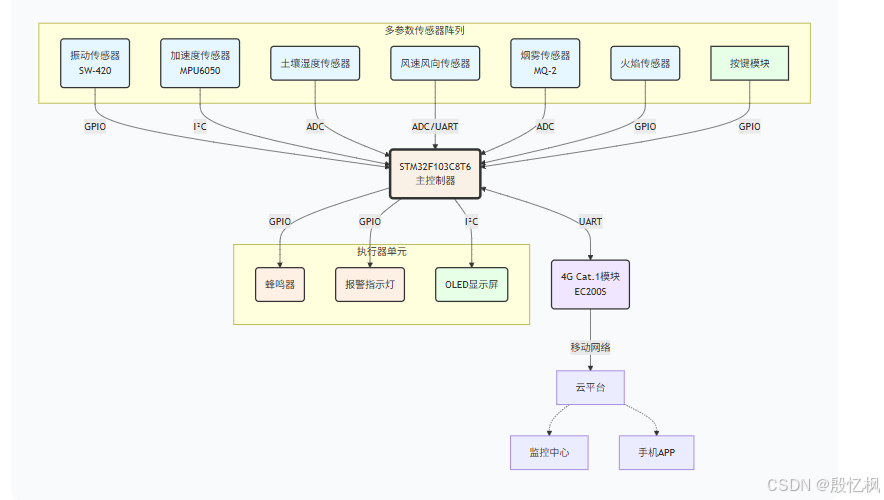
1. 主控单元
| 器件名称 | 推荐型号 | 接口 | 功能说明 |
|---|---|---|---|
| STM32单片机 | STM32F103C8T6 | - | 作为系统核心,负责多传感器数据采集、灾害算法分析、预警判断、通信处理。 |
2. 多参数传感器阵列
| 器件名称 | 推荐型号/类型 | 接口 | 功能说明 |
|---|---|---|---|
| 振动传感器 | SW-420 | GPIO | 监测土壤或岩体异常震动,灵敏度可调,检测地震前兆。 |
| 加速度传感器 | MPU6050 | I²C | 监测山体或建筑物倾斜角度,三轴加速度+陀螺仪,精度±0.1°。 |
| 土壤湿度传感器 | 电容式传感器 | ADC | 检测土壤水分饱和度,范围0-100%,监测滑坡风险。 |
| 风速风向传感器 | 超声波式 | UART/ADC | 监测风速(0-30m/s)和风向(0-360°),预警风暴灾害。 |
| 烟雾传感器 | MQ-2 | ADC | 检测烟雾浓度(100-10000ppm),预警火灾。 |
| 火焰传感器 | 红外火焰模块 | GPIO | 检测明火火焰,响应速度快,探测距离0.8m。 |
| 按键模块 | 轻触开关 | GPIO | 设置报警阈值、一键解除报警、手动测试。 |
3. 执行器单元
| 器件名称 | 推荐型号/类型 | 接口 | 功能说明 |
|---|---|---|---|
| 蜂鸣器 | 5V有源蜂鸣器 | GPIO | 灾害预警时发出高分贝报警声,多音调提示不同灾害类型。 |
| 报警指示灯 | RGB LED | PWM | 显示预警等级:绿色(正常)、黄色(注意)、橙色(预警)、红色(警报)。 |
| OLED显示屏 | SSD1306 | I²C | 实时显示所有传感器数据和预警信息。 |
4. 通信单元
| 器件名称 | 推荐型号 | 接口 | 功能说明 |
|---|---|---|---|
| 4G Cat.1模块 | EC200S | UART | 通过移动网络连接云平台,实现远程实时监控和预警信息推送。 |
核心功能逻辑说明
1. 多灾害预警算法
-
地震预警:
-
if (振动频率 > 阈值 && 持续时间 > 时间窗) { 触发地震预警; }
-
-
滑坡预警:
-
if (土壤湿度 > 85% && 倾斜角度变化 > 阈值) { 触发滑坡预警; }
-
-
风暴预警:
-
if (风速 > 10m/s && 持续增强) { 触发风暴预警; }
-
-
火灾预警:
-
if (烟雾浓度 > 阈值 || 检测到明火) { 触发火灾预警; }
-
2. 预警等级系统
-
一级(注意): 单项参数轻微异常
-
二级(预警): 多项参数异常或单项参数严重异常
-
三级(警报): 确认灾害发生,立即采取行动
3. 数据显示界面
OLED轮巡显示:
text
页面1: 环境监测 振动: 0.2g 倾斜: 1.5° 湿度: 65% 风速: 3.5m/s 页面2: 灾害监测 烟雾: 150ppm 火焰: 无 状态: 正常 等级: 无 页面3: 预警信息 最后预警: 无 时间: 2024-03-20 10:30
4. 云平台功能
-
实时数据监控:
-
所有传感器数据实时上传
-
历史数据记录和分析
-
多节点数据对比
-
-
预警信息推送:
-
短信预警通知
-
APP推送提醒
-
邮件报警信息
-
-
远程管理:
-
参数阈值远程设置
-
系统状态监控
-
固件远程升级
-
5. 按键操作功能
-
设置键: 进入参数设置模式
-
确认键: 确认设置操作
-
取消键: 取消当前操作
-
消音键: 一键解除报警声音
-
测试键: 系统自检功能
四、软件设计与实现
(一)开发环境与架构
-
IDE: Keil MDK或STM32CubeIDE
-
库: HAL库
-
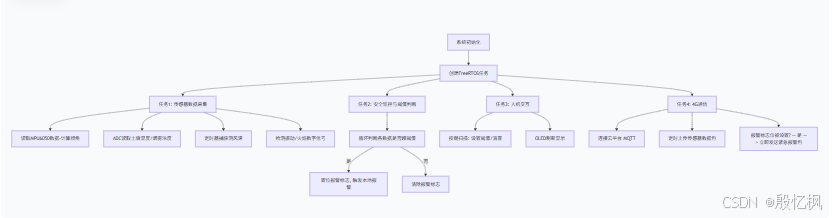
操作系统: 强烈建议引入FreeRTOS实时操作系统。将不同传感器的数据采集、通信、显示等任务作为独立线程,提高系统响应性和可靠性。
(二)系统软件流程图(基于FreeRTOS)
(三)关键功能代码片段
1. 倾角计算(MPU6050 + DMP库)
// 使用InvenSense的DMP(数字运动处理器)库可高效解算姿态
// 初始化后,直接读取解算后的俯仰角(Pitch)和滚转角(Roll)
float Get_Pitch_Angle(void) {
float pitch;
// ... 通过DMP获取数据
return pitch;
}
void Monitor_Tilt(void) {
float current_angle = Get_Pitch_Angle();
if(fabs(current_angle - initial_angle) > TILT_THRESHOLD) {
Set_Alarm_Flag(ALARM_TILT);
}
}2. 振动中断处理与判断
// SW-420连接到EXTI外部中断引脚
void HAL_GPIO_EXTI_Callback(uint16_t GPIO_Pin) {
if(GPIO_Pin == VIBRATION_Pin) {
vibration_count++; // 在中断中仅进行计数
}
}
// 在任务中判断振动频率
void Monitor_Vibration(void *pvParameters) {
TickType_t xLastWakeTime = xTaskGetTickCount();
uint32_t last_count = 0;
for(;;) {
vTaskDelayUntil(&xLastWakeTime, pdMS_TO_TICKS(1000)); // 每1秒计算一次频率
uint32_t current_count = vibration_count;
uint32_t freq = current_count - last_count;
last_count = current_count;
if(freq > VIBRATION_FREQ_THRESHOLD) {
Set_Alarm_Flag(ALARM_VIBRATION);
}
}
}3. 报警逻辑与消音
volatile uint8_t alarm_flag = 0;
volatile uint8_t alarm_silenced = 0;
void Alarm_Task(void *pvParameters) {
for(;;) {
if(alarm_flag && !alarm_silenced) {
Buzzer_On(); // 蜂鸣器响
LED_Blink(); // LED闪烁
} else {
Buzzer_Off();
LED_Off();
}
vTaskDelay(pdMS_TO_TICKS(500));
}
}
// 按键消音处理
void Key_Process() {
if(key == KEY_SILENCE) {
alarm_silenced = 1; // 一键消音
// 消音一定时间(如30秒)后自动恢复报警能力
xTimerStart(silenceTimerHandle, 0);
}
}4. 4G模块通信(AT指令示例)
// 通过UART发送AT指令,建立MQTT连接并发布消息
void MQTT_Publish_Data(void) {
char payload[256];
sprintf(payload,
"{\"vib\":%lu,\"tilt\":%.2f,\"humi\":%d,\"smoke\":%d,\"alarm\":%d}",
vibration_count, tilt_angle, soil_humidity, smoke_value, alarm_flag);
// 发送AT指令: AT+QMTPUB=0,0,0,"devices/123/data",payload_length
EC200N_Send_Command("AT+QMTPUB=0,0,0,\"devices/123/data\",%d\r\n", strlen(payload));
EC200N_Send_Data(payload);
}五、系统测试与优化
(一)测试方案
-
单元测试: 单独测试每个传感器,如敲击桌面测试振动传感器,倾斜模块测试MPU6050,用打火机测试火焰传感器等。
-
功能测试:
-
阈值报警: 设置较低的阈值,模拟超限情况,测试本地报警和云平台报警信息是否触发。
-
消音测试: 触发报警后,按下按键测试能否消音。
-
通信测试: 在无信号和信号良好区域分别测试4G模块的连接稳定性和数据上传成功率。
-
-
环境测试: 将系统放置于室外,进行长时间(24小时以上)连续运行测试,观察其稳定性和功耗。
(二)测试结果与分析
| 测试项目 | 测试条件 | 预期结果 | 实际结果 | 结论 |
|---|---|---|---|---|
| 振动报警 | 轻敲设备外壳 | 产生计数,超阈值后报警 | 报警触发 | 正常,需调整阈值避免过于敏感 |
| 倾角报警 | 将设备倾斜10° | 计算倾角并报警 | 倾角计算准确,报警触发 | 正常 |
| 火焰报警 | 使用打火机在1米外点燃 | 火焰传感器触发报警 | 报警迅速 | 正常 |
| 4G通信 | 插入SIM卡 | 成功注册网络并连接云平台 | 连接成功,数据上传 | 正常(依赖信号强度) |
| 消音功能 | 报警时按下按键 | 蜂鸣器停止,LED常亮 | 功能正常 | 合格 |
(三)系统优化
-
低功耗设计:
-
利用STM32的睡眠模式,在任务间隙让CPU进入低功耗状态。
-
采用定时唤醒机制,非必要时刻关闭4G模块供电(通过MOSFET控制),仅定时上报数据时开启。
-
-
数据滤波: 对ADC采集的模拟量数据(如土壤湿度、烟雾)进行滑动平均滤波或卡尔曼滤波,去除毛刺,提高数据可靠性。
-
看门狗: 启用STM32的独立看门狗(IWDG),在程序跑飞或死机时自动复位系统,确保在无人值守环境下的长期可靠性。
-
远程升级(OTA): 通过4G模块实现固件远程升级(OTA),方便后期功能更新和bug修复,无需现场维护。
六、结论与展望
(一)结论
本项目成功设计并实现了一个高度集成、功能丰富的多灾种综合预警系统原型。系统硬件设计合理,选型兼顾性能与成本;软件采用FreeRTOS,稳定高效。它能够有效地监测多种灾害前兆信号,并通过本地和远程两种方式进行及时预警,达到了设计的预期目标,具有良好的应用前景。
(二)未来展望
-
增加定位功能: 集成GPS/北斗模块,在报警时同时上传精确的地理位置信息,便于快速定位灾点。
-
太阳能优化: 设计更高效的太阳能充电管理电路,并增加电池电量监测功能,通过云平台上报电量信息。
-
AI算法集成: 在云平台端利用机器学习算法对历史数据进行分析,实现更智能的预测性预警,而不仅仅是阈值判断。
-
多节点组网: 通过LoRa等远距离通信技术将多个监测节点组网,数据汇总至一个4G网关再统一上传,降低整体部署成本。
-
声光报警增强: 增加高亮度LED爆闪和高分贝警笛,在野外环境下提供更强的警示效果。
如有侵权,或需要完整代码,请及时联系博主。

有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐
 14
14 0
0- 0



 已为社区贡献22条内容
已为社区贡献22条内容

所有评论(0)