C++ ROS中的Unix Domain Socket (UDS) 深度解析与实践
本文深入探讨了Unix Domain Socket (UDS)在C++ ROS环境中的应用,介绍了UDS的基础理论与三种通信类型(SOCK_STREAM、SOCK_DGRAM、SOCK_SEQPACKET)及其适用场景。文章详细阐述了UDS的高效性优势,并提供了C++实现UDS服务器和客户端的编程实践示例,包括面向对象设计、错误处理和资源管理等内容,为ROS开发者提供了全面的技术指导。
0. 引言
在机器人操作系统(ROS)的架构设计中,进程间通信(IPC)是核心组件之一。传统的ROS通信主要依赖TCP/IP协议栈,但在同一主机上的进程间通信场景中,Unix Domain Socket (UDS)提供了更高效、更可靠的解决方案。本文将深入探讨UDS在C++ ROS环境中的应用,从理论基础到实际代码实现,为读者提供全面的技术指导。
1. Unix Domain Socket基础理论
1.1 什么是Unix Domain Socket
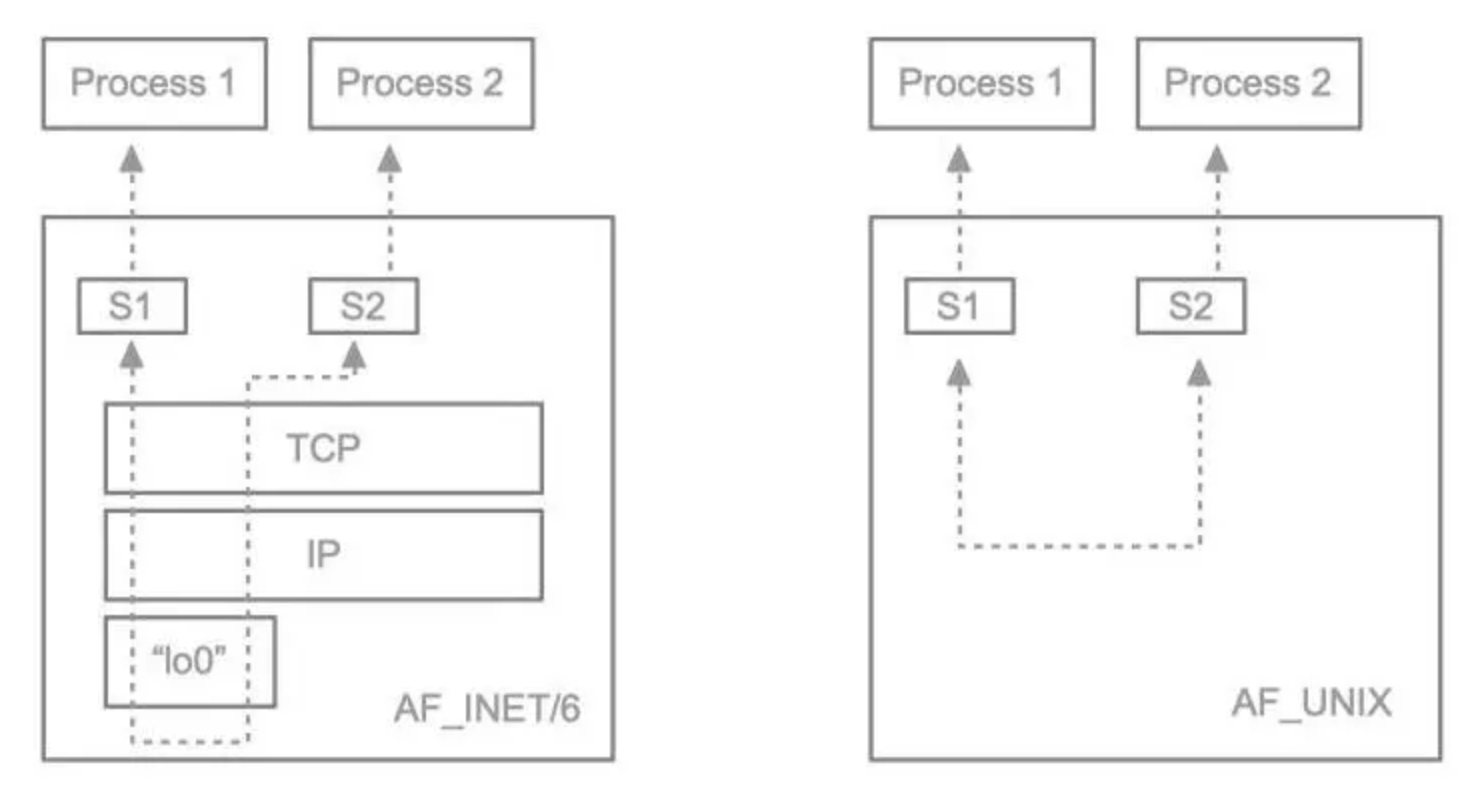
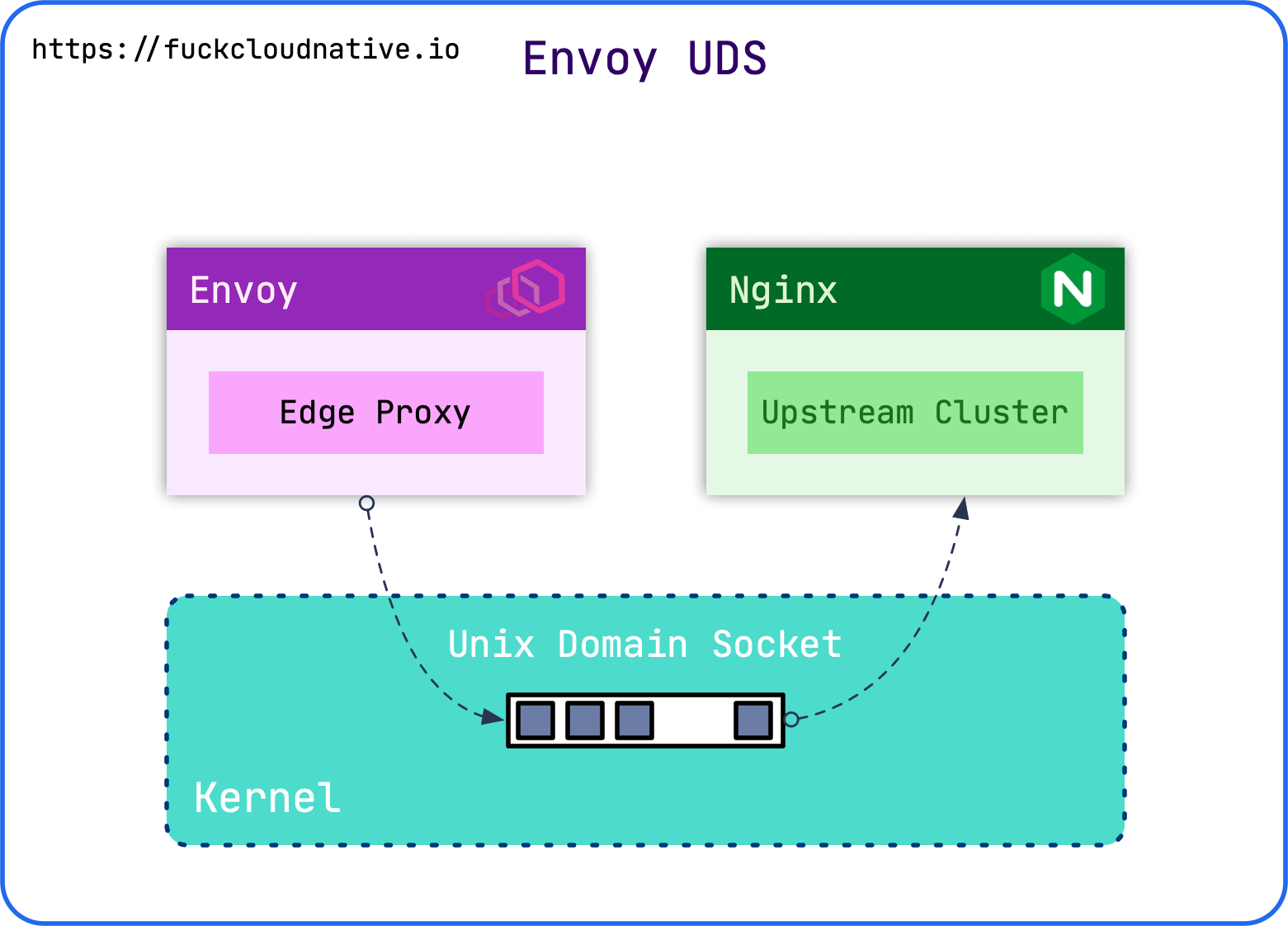
Unix Domain Socket是一种特殊的IPC机制,它允许运行在同一台主机上的进程通过文件系统路径进行通信。与传统的Internet Socket不同,UDS不需要经过网络协议栈,数据直接在内存中传输,因此具有更高的性能和更低的延迟。
UDS的核心优势在于其简化的通信模型。传统的TCP/IP通信需要经过复杂的网络协议栈处理,包括IP头封装、TCP段分割、校验和计算、路由选择等步骤。而UDS完全绕过了这些开销,数据直接从发送进程的用户空间拷贝到接收进程的用户空间,整个过程都在内核内存中进行,无需磁盘I/O操作。
1.2 UDS的三种通信类型
UDS支持三种主要的通信类型,每种类型都有其特定的应用场景和性能特征。这些类型的选择直接影响着应用程序的性能表现和可靠性要求。
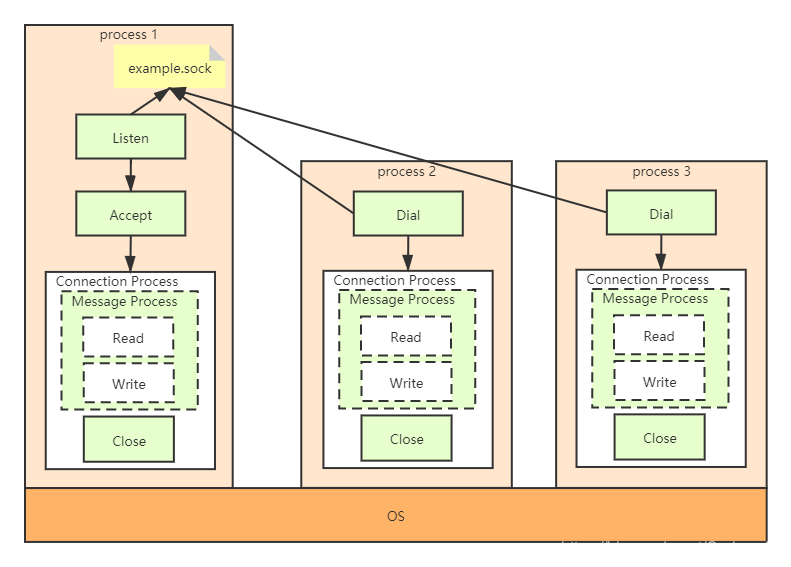
1. SOCK_STREAM (流套接字) SOCK_STREAM提供有序、可靠、面向连接的双向字节流通信,其工作方式与TCP协议非常相似。这种类型的套接字确保数据按照发送顺序无差错到达,并且需要显式建立连接(通过listen()、accept()、connect()等系统调用)。SOCK_STREAM特别适用于需要保证数据完整性和顺序性的场景,如文件传输、数据库连接等。在ROS环境中,这种类型常用于需要可靠数据传输的配置同步、参数服务器通信等场景。
2. SOCK_DGRAM (数据报套接字) SOCK_DGRAM提供无连接、不可靠、有边界的数据报通信,类似于UDP协议的工作方式。这种类型的套接字对消息大小有限制,数据可能丢失或乱序,但具有更低的延迟和更高的实时性。SOCK_DGRAM特别适用于对实时性要求极高但允许少量数据丢失的场景,如传感器数据流传输、实时控制指令等。在机器人系统中,激光雷达数据、摄像头图像流等高频数据传输场景中,SOCK_DGRAM可以提供更好的性能表现。
3. SOCK_SEQPACKET (序列数据包套接字) SOCK_SEQPACKET是一种介于流套接字和数据报套接字之间的通信类型,它提供有序、可靠、有边界的数据报通信。每条消息作为独立单元发送,接收顺序与发送顺序一致,同时保证消息的可靠交付。这种类型特别适用于需要消息边界但又要保证可靠性的场景,如ROS节点间的命令传输、状态同步等。SOCK_SEQPACKET在保持消息完整性的同时,还提供了更好的消息分割和重组能力。
2. C++ UDS编程实践
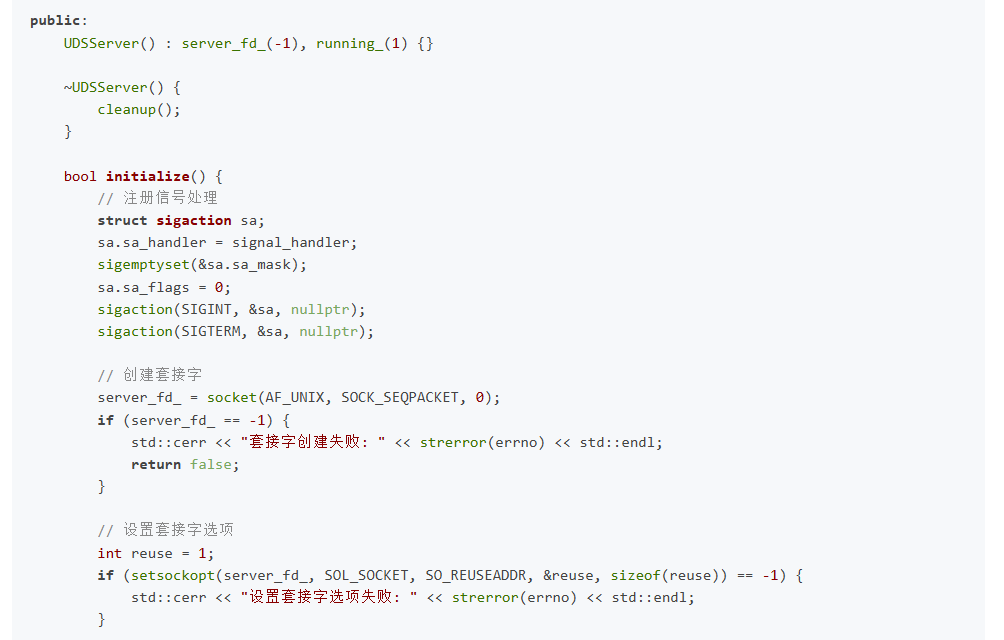
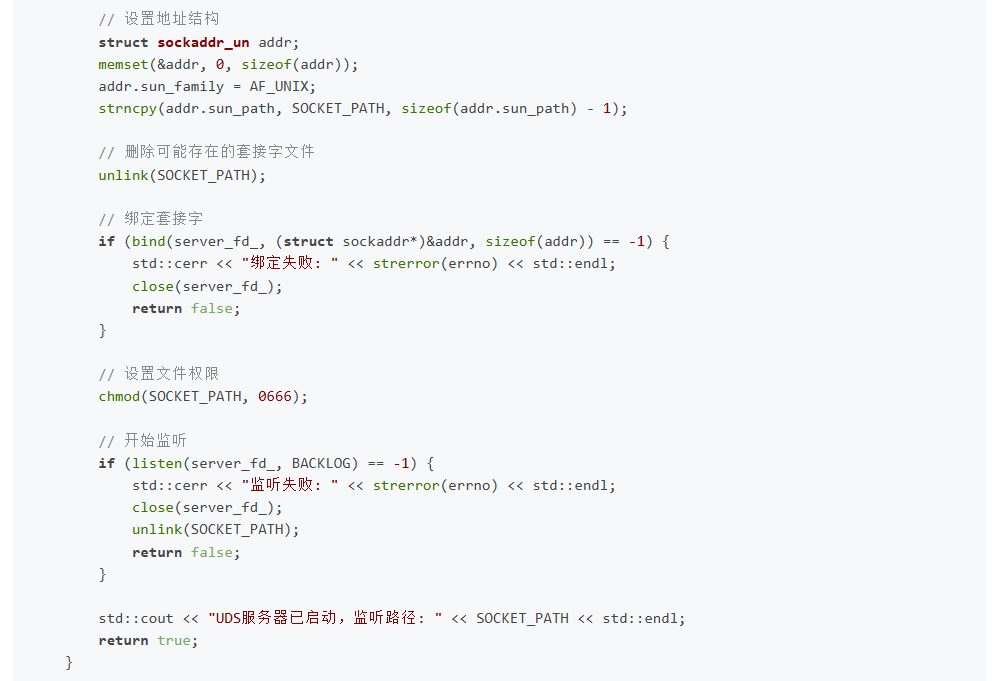
2.1 基础UDS服务器实现
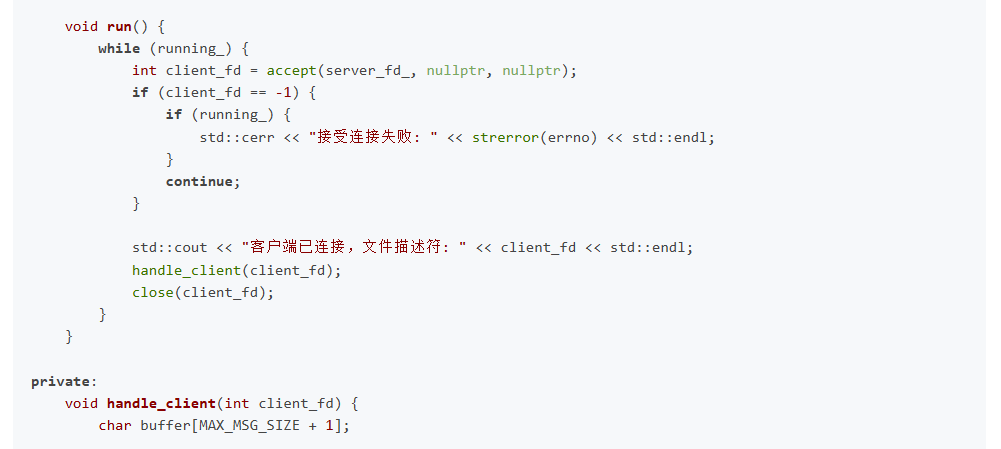
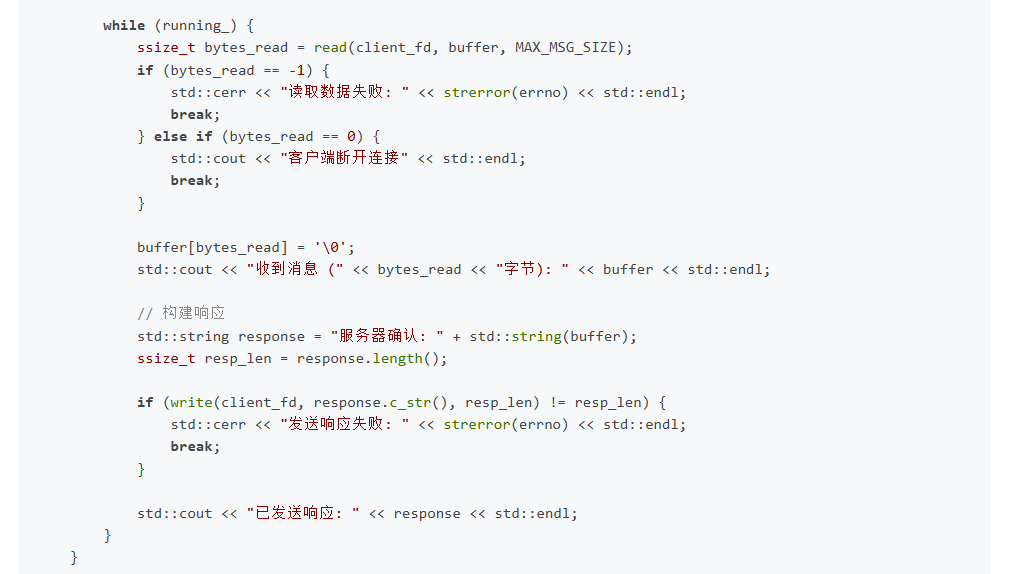
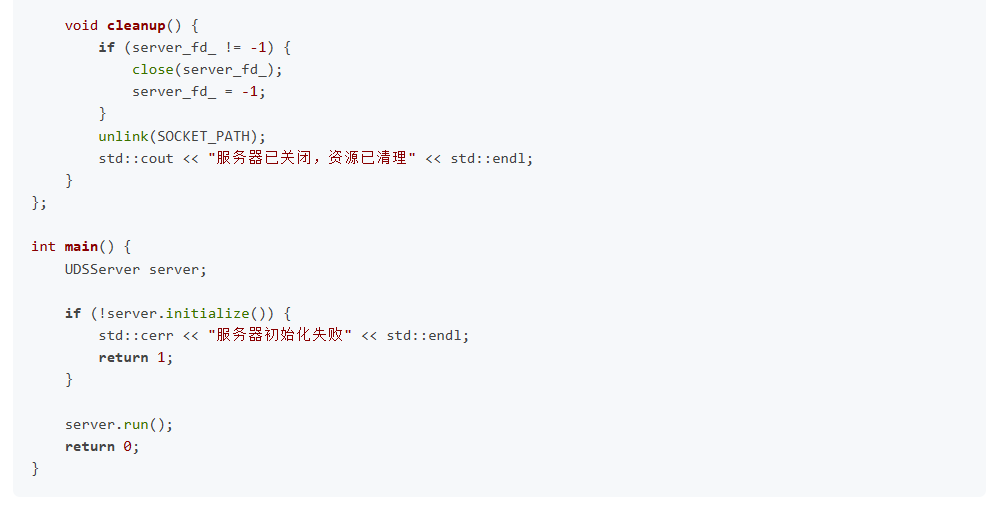
在实际的ROS开发中,UDS服务器的实现需要考虑多种因素,包括错误处理、资源管理、并发连接等。下面是一个完整的C++ UDS服务器实现示例,展示了如何使用SOCK_SEQPACKET类型创建可靠的UDS服务器。这个实现采用了面向对象的设计模式,提供了良好的封装性和可维护性,同时包含了完善的错误处理机制和资源清理功能。

2.2 基础UDS客户端实现
UDS客户端的设计同样需要考虑连接管理、数据传输效率和错误恢复等关键因素。对应的客户端实现展示了如何连接到UDS服务器并进行高效的数据交换。这个客户端实现采用了智能的资源管理策略,确保在连接异常或程序退出时能够正确释放系统资源,同时提供了灵活的消息发送和接收接口,支持多种数据类型的传输。

有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐

 18
18 0
0- 0



 已为社区贡献14条内容
已为社区贡献14条内容

所有评论(0)