【具身智能大模型】一文读懂具身智能大模型,不要太详细了。
一文掌握具身智能大模型
1、引言
小屌丝:鱼哥,你这是"闭关"一个月了?
小鱼:我这是进修一个月
小屌丝:那你也不提前说一下
小鱼:没看到门口有两个"护法"的?
小屌丝:… 你真能扯
小鱼:这是"幻觉"
小屌丝:… 唠点正经嗑
小鱼:还在回味 9.3阅兵呢?
小屌丝:那是, 国家强大,我们当然自豪了。
小鱼:那这得仔细回味
小屌丝:又跑偏了,鱼哥,你这1个月没写博客了,手生了吧
小鱼:不打紧,不打紧
小屌丝:那不行的, 要不咱就从具身智能 聊一聊?
小鱼:这天也是热,怎么还突然饿了
小屌丝:…刚攒点钱… 这又得…
小鱼:我请?
小屌丝:你请?
小鱼:你讲?
小屌丝:我请。
小鱼:妥了。

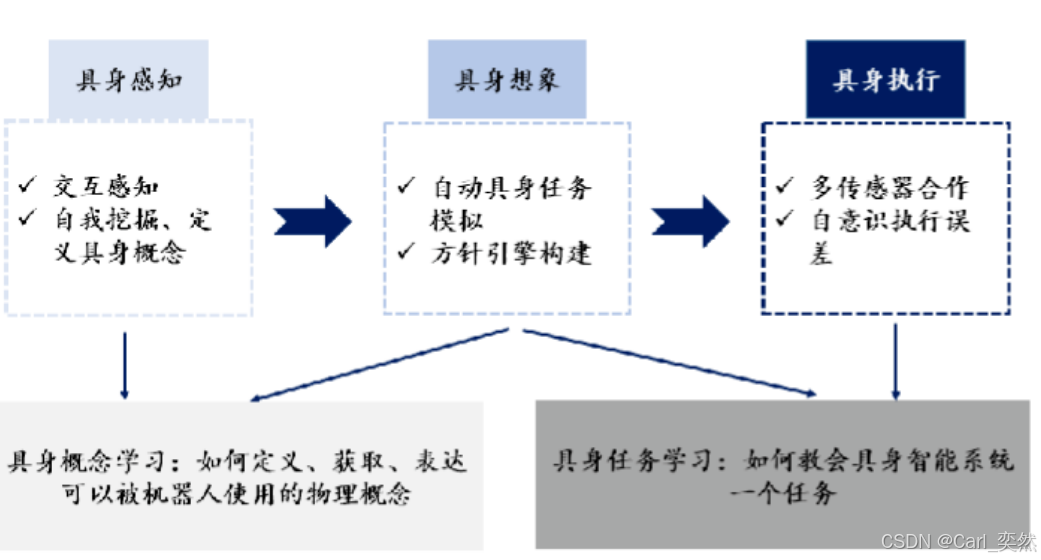
2. 具身智能大模型:定义与内涵
-
具身智能(Embodied AI)是指通过多模态大模型和机器人等物理实体融合,与环境交互,能进行环境感知、信息认知、自主决策和敏捷行动,并能够从经验习得中实现智能进化和主动适应的智能系统。
-
与传统非具身大模型(如GPT、Sora、文心一言等)主要处理语言、图片和视频数据不同,具身智能大模型不仅能处理视觉和语言信号,还能输出具体的物理动作,更好地适应和操作三维物理世界。
-
核心特征:物理本体 + 环境交互 + 智能进化
3、 与通用大模型的核心区别
| 特性 | 通用大模型 | 具身智能大模型 |
|---|---|---|
| 交互环境 | 虚拟数字世界 | 物理现实世界 |
| 输出形式 | 文本、图像、视频 | 物理动作、运动控制 |
| 数据依赖 | 文本、图像数据集 | 多模态传感器数据+物理交互数据 |
| 评估标准 | 准确率、流畅度 | 任务完成度、物理效率、安全性 |
| 学习方式 | 离线预训练+微调 | 在线强化学习+模仿学习 |
4、核心技术栈
4.1 系统架构:分层与端到端两种范式
4.1.1 分层决策范式(Hierarchical Decision-Making)
- 采用"感知→高层规划→底层执行→反馈"的模块化设计:
- 感知模块:多传感器融合(视觉、激光雷达、力觉等),将物理信号转化为数字信号
- 高层规划:大语言模型理解任务目标,生成结构化规划(PDDL、自然语言或代码)
- 底层执行:传统控制(PID、MPC)或现代学习-based方法(扩散策略、Transformer策略)
- 反馈闭环:自我反思、人类反馈和环境反馈组成的优化机制
4.1.2 端到端决策范式(Vision-Language-Action模型)
- 直接将多模态输入映射为动作输出,典型代表包括:
- RT系列模型(Google):实现从人类指令到机械臂执行的端到端映射
- GraspVLA(银河通用):基于十亿级仿真合成动作数据预训练,实现零样本泛化能力
- Octo、Diffusion-VLA:采用扩散模型和Transformer结构,输出平滑轨迹
4.2 核心组件与技术
-
感知系统(Perception):多模态信息接收和处理,包括视觉、听觉、触觉等传感器数据转换为模型可理解格式
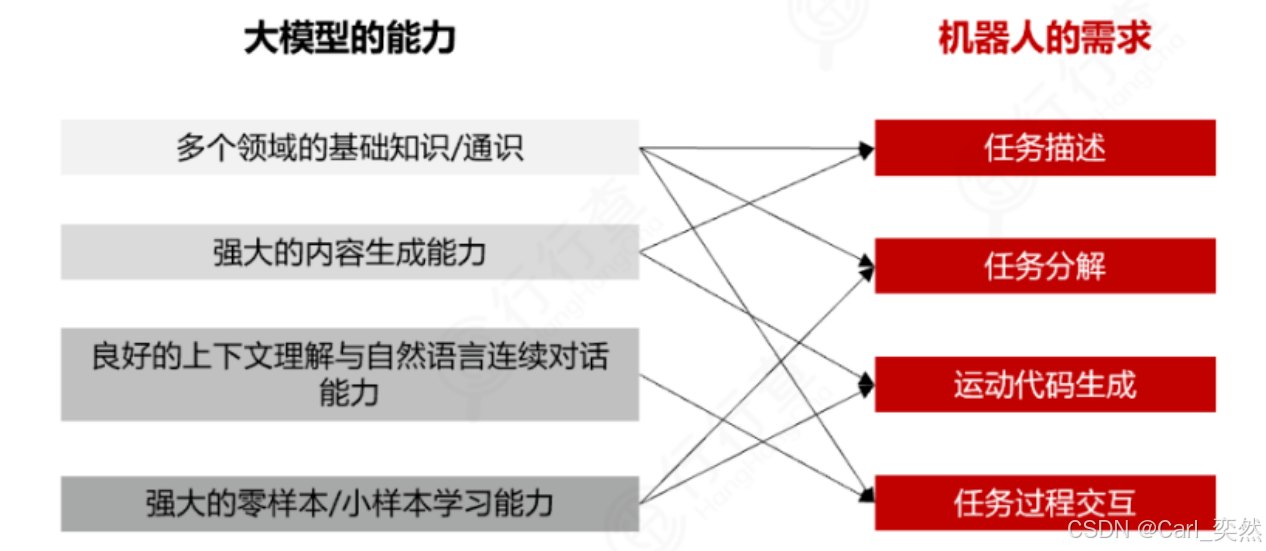
- 大语言模型(LLM):作为"认知引擎",负责任务理解、逻辑推理和高层规划
- 任务理解:将自然语言指令转化为结构化任务目标
- 高层规划:生成分步执行的子任务序列
- 逻辑推理:解决任务中的不确定性问题
- 规划系统(Planning):制定目标导向的行动策略和执行步骤,支持动态调整
-
记忆系统(Memory):存储和管理短期上下文与长期经验知识,提供个性化支持
-
工具集成(Tools):扩展Agent能力的外部工具和API接口
-
行动执行(Action):将决策转化为具体操作并产生实际效果
-
环境交互(Environment):提供反馈和观察结果的外部操作空间
4.3 世界模型(World Model):决策与学习的新引擎
世界模型是智能体内部构建的"虚拟环境模拟器",基于历史感知数据预测未来环境状态,具有四大设计路线:
- Latent Space:RSSM → Dreamer系列,低维潜空间预测
- Transformer:Genie、IRIS用自注意力建模长程依赖
- Diffusion:UniPi、Sora直接在像素空间生成未来帧
- JEPA:LeCun提出非生成式联合嵌入预测架构,强调常识推理
世界模型在决策与学习中有两大应用场景:
- 在"脑内"模拟验证动作降低真实交互成本;
- 提供虚拟交互环境+合成数据,提升样本效率。
5、 数据依赖与训练方法
5.1 数据需求:千倍于其他AI领域
具身智能对数据的需求远超其他赛道,其规模将达到自动驾驶或大语言模型的千倍万倍。原因在于:
- 应用场景高度多样:瞄准千行百业,从工业操作到家庭服务
- 物理交互复杂性:涉及力反馈、物体形变、复杂关节运动等物理属性
- 机器人本体形态异构:双足、轮式、机械臂等不同构型导致数据天然分散
- 预训练数据极度匮乏:目前尚无大规模机器人落地应用
5.2 合成数据:关键基础设施
由于真实数据采集的局限性,合成数据成为推动具身智能规模化发展的关键基础设施。高质量具身合成数据需满足四个关键条件:
- 物理交互必须真实:高精度还原物理反馈(如阻尼力、触发反馈、柔体形变)
- 人在环的数据生成:通过遥操作采集专业人员操作数据,提供可泛化的高阶认知
- 场景足够丰富:生成海量差异化场景,构建广泛且合理的数据分布
- 通过数据闭环实现有效性验证:对数据效用进行验证,确保仿真到现实的迁移效果
5.3 训练方法
- 模仿学习:从人类示范数据中学习动作策略
- 扩散策略:使用U-Net建模多模态动作分布,抗噪声、长程一致
- Transformer策略:采用Decision Transformer结构,端到端输出动作序列
- 强化学习:大模型解决奖励函数设计难和策略网络表达弱两大痛点
- 自动奖励生成:GPT-4自动生成密集奖励(Eureka、Text2Reward)
- 强大策略网络:扩散/Transformer/LLM作为策略(Diffusion-QL、GLAM、LaMo)
- 多任务学习与元学习:通过共享表征和快速适应,实现跨任务泛化
6、 交互方式
具身智能大模型通过多种方式与环境及人类交互:
- 人机交互:理解自然语言指令,生成物理响应
- 环境交互:通过传感器感知环境,通过执行器影响环境
- 多智能体协作:多个AI智能体像人类团队一样分工合作
- AutoGen:对话驱动的多智能体框架,通过GroupChat机制协调发言顺序
- CrewAI:角色专业化协作的多智能体框架,构建Agent-Role-Task三层协作模型
- 持续学习:从交互中不断优化技能,适应新任务与新场景
7、 应用场景与商业化进展
7.1 工业制造
- 美的集团打造"智能体工厂",14个智能体覆盖38个核心生产业务场景:
- 美罗人形机器人:执行品质首检、巡检等高频次任务,实现实时响应与全流程自主决策
- 玉兔-AI巡检机器人:通过多模态数据空间感知,实现精准空间理解,巡检频次提升100%
- 库卡协作机器人:与计划智能体协同,实现柔性化作业,适应混流生产场景
7.2 智慧零售
银河通用机器人落地应用:
- 无人药店:精准抓取药品并交付给顾客
- 机器人商店:24小时无人化销售,模块化设计部署灵活
- 商超场景:自主导航与任务执行,取货架商品
7.3 其他应用领域
- 家庭服务:家政劳动、老人照料、家庭安防
- 医疗康复:手术辅助、康复训练、病房服务
- 特殊环境:太空作业、深海探索、危险环境处理
- 交通运输:自动驾驶、物流配送、无人机操作
8、总结
具身智能大模型代表着AI从虚拟世界走向物理世界的重大转变,是实现通用人工智能的关键路径。
通过多模态大模型与机器人技术的深度融合,具身智能正逐步在工业、服务、家庭等多个领域展现其价值。
虽然仍面临数据、计算、安全等多重挑战,但随着技术的不断进步和创新,具身智能有望真正成为人类在物理世界的智能助手,重塑人类与机器的互动方式。
我是小鱼:
- CSDN 博客专家;
- AIGC 技术MVP专家;
- 阿里云 专家博主;
- 51CTO博客专家;
- 企业认证金牌面试官;
- 多个名企认证&特邀讲师等;
- 名企签约职场面试培训、职场规划师;
- 多个国内主流技术社区的认证专家博主;
- 多款主流产品(阿里云等)评测一等奖获得者;

有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐
 13
13 0
0- 0



 已为社区贡献17条内容
已为社区贡献17条内容

所有评论(0)