ros callback 回调机制 & 订阅队列长度
实验程序:talker.cc#include <std_msgs/Int32.h>#include <ros/ros.h>int main(int argc, char **argv) {ros::init(argc, argv, "talker");ros::NodeHandle nh;std_msgs::Int32 data;data.data = 0;ros::Pub
实验程序:
talker.cc
#include <std_msgs/Int32.h>
#include <ros/ros.h>
int main(int argc, char **argv) {
ros::init(argc, argv, "talker");
ros::NodeHandle nh;
std_msgs::Int32 data;
data.data = 0;
ros::Publisher pub = nh.advertise<std_msgs::Int32>("alan_topic", 1);
ros::Rate loop_rate(1.0); // 1hz
while (ros::ok()) {
data.data++;
pub.publish(data);
std::cout << std::setprecision(12) << "[" << ros::Time::now().toSec() << "] publish " << data.data << std::endl;
loop_rate.sleep();
}
return 0;
}listener.cc
#include <ros/ros.h>
#include <std_msgs/Int32.h>
void alan_callback(const std_msgs::Int32& data){
std::cout << std::setprecision(12) << "[" << ros::Time::now().toSec() << "] process " << data.data << " short time" << std::endl;
std::cout << std::setprecision(12) << "[" << ros::Time::now().toSec() << "] process " << data.data << " long time" << std::endl;
return;
}
int main(int argc, char ** argv) {
ros::init(argc, argv, "listener");
ros::NodeHandle nh;
ros::Subscriber sub = nh.subscribe("alan_topic", 1, alan_callback);
ros::spin();
return 0;
}实时

listener.cc
#include <unistd.h>
#include <ros/ros.h>
#include <std_msgs/Int32.h>
void alan_callback(const std_msgs::Int32& data){
std::cout << std::setprecision(12) << "[" << ros::Time::now().toSec() << "] process " << data.data << " short time" << std::endl;
std::cout << std::setprecision(12) << "[" << ros::Time::now().toSec() << "] process " << data.data << " long time" << std::endl;
sleep(5); // 5秒
return;
}
int main(int argc, char ** argv) {
ros::init(argc, argv, "listener");
ros::NodeHandle nh;
ros::Subscriber sub = nh.subscribe("alan_topic", 1, alan_callback);
ros::spin();
return 0;
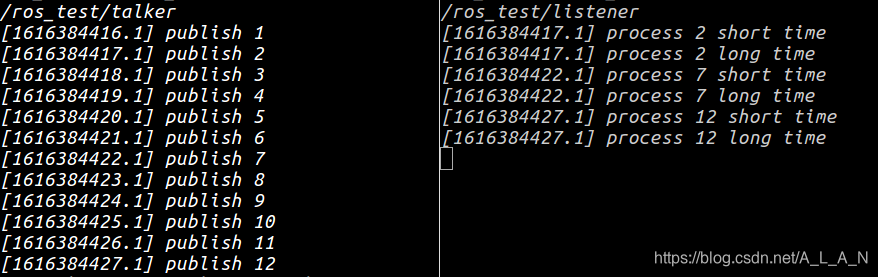
}回调函数处理时间长导致数据丢失(队列长度为1,处理回调函数时间过长时时,队列里旧数据不断被新数据顶掉,处理完第2帧时队列里数据为7,丢失数据的帧数跟回调处理时间有关,是动态变化的)
listener.cc
#include <unistd.h>
#include <ros/ros.h>
#include <std_msgs/Int32.h>
void alan_callback(const std_msgs::Int32& data){
std::cout << std::setprecision(12) << "[" << ros::Time::now().toSec() << "] process " << data.data << " short time" << std::endl;
std::cout << std::setprecision(12) << "[" << ros::Time::now().toSec() << "] process " << data.data << " long time" << std::endl;
sleep(5); // 5秒
return;
}
int main(int argc, char ** argv) {
ros::init(argc, argv, "listener");
ros::NodeHandle nh;
ros::Subscriber sub = nh.subscribe("alan_topic", 5, alan_callback);
ros::spin();
return 0;
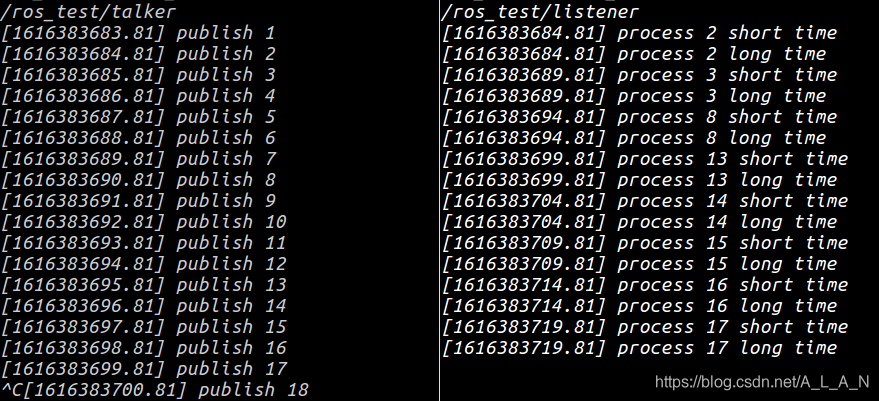
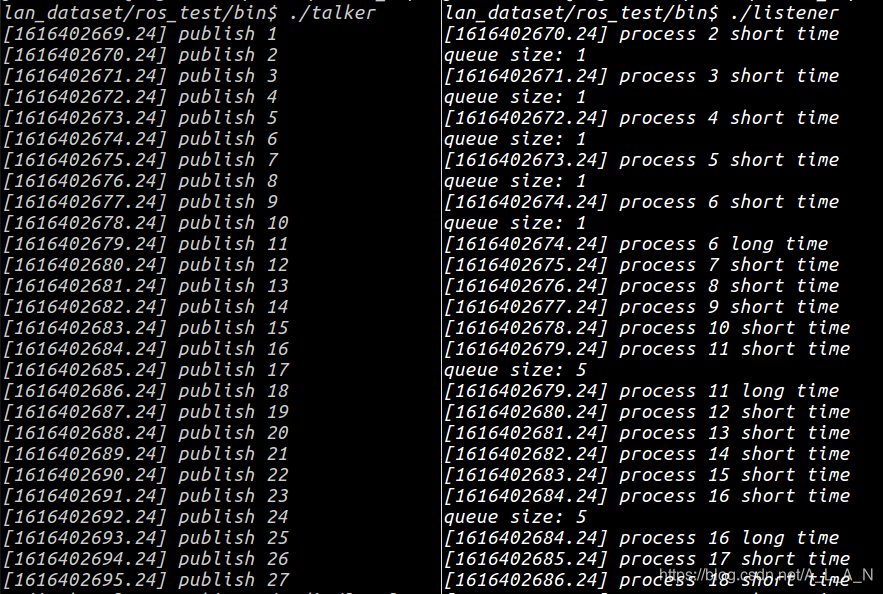
}只扩大回调队列长度;处理有延时,且有数据丢失
处理第3帧是因为一开始队列为空,第2帧处理完时队列刚满(3,4,5,6,7),队首为3,还没被顶掉
处理第14,15,16,17帧是因为talker在publish第17帧后终止,此时队列为(13,14,15,16,17),listener会依次处理直到队列为空
listener.cc
#include <unistd.h>
#include <ros/ros.h>
#include <std_msgs/Int32.h>
void alan_callback(const std_msgs::Int32& data){
std::cout << std::setprecision(12) << "[" << ros::Time::now().toSec() << "] process " << data.data << " short time" << std::endl;
if (data.data % 5 == 0) {
std::cout << std::setprecision(12) << "[" << ros::Time::now().toSec() << "] process " << data.data << " long time" << std::endl;
sleep(5); // 5秒
}
return;
}
int main(int argc, char ** argv) {
ros::init(argc, argv, "listener");
ros::NodeHandle nh;
ros::Subscriber sub = nh.subscribe("alan_topic", 5, alan_callback);
ros::spin();
return 0;
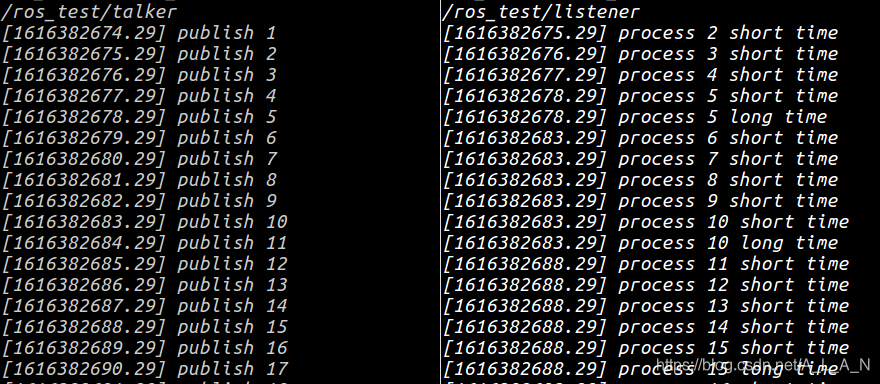
}扩大回调队列长度(队列长度至少设为回调函数最长处理时间 / 订阅的topic的频率),并且做跳帧处理;无数据丢失,且在跳帧处实时
另起一个后端处理线程
listener.cc
#include <unistd.h>
#include <queue>
#include <thread>
#include <mutex>
#include <condition_variable>
#include <ros/ros.h>
#include <std_msgs/Int32.h>
std::queue<int> q;
std::mutex m;
std::condition_variable cv;
bool data_ready = false;
void Process() {
while(ros::ok()) {
std::unique_lock<std::mutex> lk(m);
cv.wait(lk, []{return data_ready;});
std::cout << "queue size: " << q.size() << std::endl;
if (q.empty()) {
continue;
}
int data = q.front();
data_ready = false;
q.pop();
lk.unlock();
std::cout << std::setprecision(12) << "[" << ros::Time::now().toSec() << "] process " << data << " long time" << std::endl;
sleep(5); // 5秒
}
}
void alan_callback(const std_msgs::Int32& data){
std::cout << std::setprecision(12) << "[" << ros::Time::now().toSec() << "] process " << data.data << " short time" << std::endl;
{
std::lock_guard<std::mutex> lk(m);
q.push(data.data);
data_ready = true;
}
cv.notify_one();
return;
}
int main(int argc, char ** argv) {
std::thread t(Process);
ros::init(argc, argv, "listener");
ros::NodeHandle nh;
ros::Subscriber sub = nh.subscribe("alan_topic", 1, alan_callback);
ros::spin();
return 0;
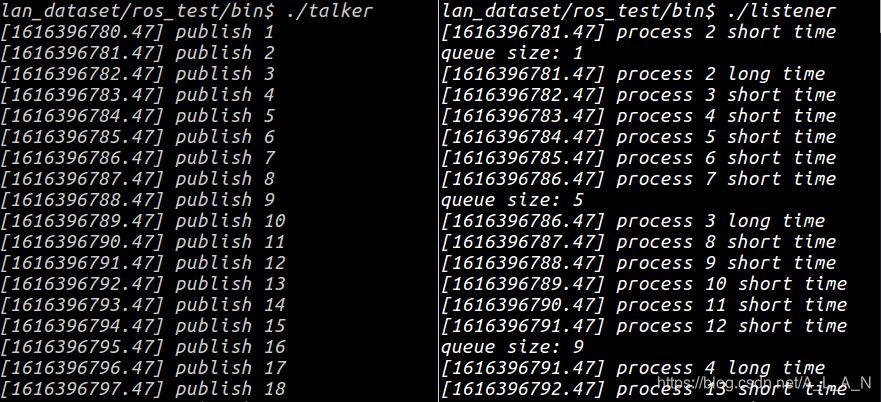
}前端callback实时预处理,后端处理线程延时处理,问题是队列q会不断加长,后端延迟越来越大
listener.cc
#include <unistd.h>
#include <queue>
#include <thread>
#include <mutex>
#include <condition_variable>
#include <ros/ros.h>
#include <std_msgs/Int32.h>
std::queue<int> q;
std::mutex m;
std::condition_variable cv;
bool data_ready = false;
void Process() {
int cnt = 0;
std::queue<int> q2;
while(ros::ok()) {
std::unique_lock<std::mutex> lk(m);
cv.wait(lk, []{return data_ready;});
std::cout << "queue size: " << q.size() << std::endl;
q2 = q;
std::queue<int> empty_q;
std::swap(empty_q, q); // 清空队列
data_ready = false;
lk.unlock();
while (!q2.empty()) {
int data = q2.front();
cnt++;
q2.pop();
if (cnt % 5 == 0) {
std::cout << std::setprecision(12) << "[" << ros::Time::now().toSec() << "] process " << data << " long time" << std::endl;
sleep(5); // 5秒
}
}
}
}
void alan_callback(const std_msgs::Int32& data){
std::cout << std::setprecision(12) << "[" << ros::Time::now().toSec() << "] process " << data.data << " short time" << std::endl;
{
std::lock_guard<std::mutex> lk(m);
q.push(data.data);
data_ready = true;
}
cv.notify_one();
return;
}
int main(int argc, char ** argv) {
std::thread t(Process);
ros::init(argc, argv, "listener");
ros::NodeHandle nh;
ros::Subscriber sub = nh.subscribe("alan_topic", 1, alan_callback);
ros::spin();
return 0;
}前端callback实时预处理,后端处理线程跳帧处理,队列q保持一定长度,后端在跳帧处实时处理
CMakeLists.txt
cmake_minimum_required(VERSION 2.8.3)
project(ros_test)
set(EXECUTABLE_OUTPUT_PATH ${PROJECT_SOURCE_DIR}/bin)
set(CMAKE_CXX_FLAGS "${CMAKE_CXX_FLAGS} -std=c++11 -pthread")
find_package(catkin REQUIRED COMPONENTS
roscpp
std_msgs
)
include_directories(
${catkin_INCLUDE_DIRS}
)
add_executable(talker src/talker.cc)
target_link_libraries(talker ${catkin_LIBRARIES})
add_executable(listener src/listener.cc)
target_link_libraries(listener ${catkin_LIBRARIES})note:
回调函数的处理时间不应太长,可只做一些简单的数据处理,然后把数据存到待处理队列,另外起一个后端线程独立处理队列中的数据;callback函数只负责push数据到队列,后端线程pop出数据并进行完整处理(在多线程中访问同一队列记得加锁mutex, condition_variable)
spinOnce原理
调用spinOnce时,首先检查当前队列(如queue1长度为4,里面有2个元素x1,x2,queue2长度为2,里面有1个元素y1),那么将会从queue1队首弹出2个元素,并执行对应的callback函数;从queue2队首弹出1个元素,并执行对应的callback函数;至于顺序,可能queue1,queue2,queue1,
或queue2,queue1,queue1等不固定。如果执行某个回调函数时间过长,队列里的元素可能被顶掉,如第一次弹出queue2的队首y1并处理y1的回调,如果y1回调处理时间较长,在处理这个回调期间,queue1来了3个数据x3,x4,x5,那么此时queue1的元素为x2,x3,x4,x5,x1被顶掉,y1的回调处理完后,弹出queue1的队首元素x2,并处理x2的回调,如果x2回调函数执行时间短,下一次弹出queue1的队首x3;如果x2回调函数执行时间长,下一次queue1弹出的队首就不一定是x3,可能是x4,x5,x6等,依次类推。
总之,调用spinOnce时,每个队列有几个元素就执行几次回调,每次都取队首的元素处理。先处理哪个队列顺序不一定。在这期间,队列中的元素还有可能会被刷新。
测试代码:
talker.cc
#include <ros/ros.h>
#include <std_msgs/Int32.h>
int main(int argc, char **argv) {
ros::init(argc, argv, "talker");
ros::NodeHandle nh;
std_msgs::Int32 data;
data.data = 0;
ros::Publisher odd_pub = nh.advertise<std_msgs::Int32>("odd_topic", 1);
ros::Publisher even_pub = nh.advertise<std_msgs::Int32>("even_topic", 1);
ros::Rate loop_rate(1.0); // 1hz
while (ros::ok()) {
data.data++;
if (data.data % 2 == 0) {
even_pub.publish(data);
} else {
odd_pub.publish(data);
}
std::cout << std::setprecision(12) << "[" << ros::Time::now().toSec()
<< "] publish " << data.data << std::endl;
loop_rate.sleep();
}
return 0;
}listener.cc
#include <ros/ros.h>
#include <std_msgs/Int32.h>
void odd_callback(const std_msgs::Int32& data) {
std::cout << std::setprecision(12) << "[" << ros::Time::now().toSec()
<< "] process " << data.data << std::endl;
return;
}
void even_callback(const std_msgs::Int32& data) {
std::cout << std::setprecision(12) << "[" << ros::Time::now().toSec()
<< "] process " << data.data << std::endl;
ros::Duration(4).sleep();
return;
}
int main(int argc, char** argv) {
ros::init(argc, argv, "listener");
ros::NodeHandle nh;
ros::Subscriber odd_sub =
nh.subscribe("odd_topic", 4, odd_callback); // 队列长度为4
ros::Subscriber even_sub =
nh.subscribe("even_topic", 2, even_callback); // 队列长度为2
ros::Duration(10).sleep(); // 保证队列全满,6个元素
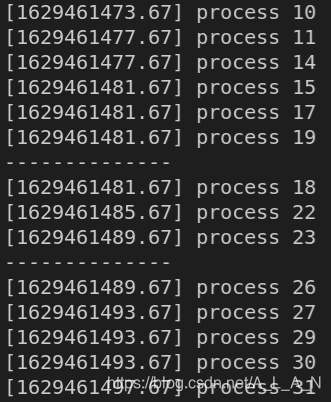
ros::spinOnce();
std::cout << "--------------" << std::endl;
ros::spinOnce();
std::cout << "--------------" << std::endl;
ros::spinOnce();
return 0;
}输出:

有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐


 19
19 0
0- 0



 已为社区贡献7条内容
已为社区贡献7条内容

所有评论(0)