C++ ROS中的Unix Domain Socket (UDS) 深度解析与实践
本文深入探讨了Unix Domain Socket(UDS)在ROS系统中的高效进程间通信实现。文章首先介绍了UDS的三种通信类型:SOCK_STREAM(可靠有序字节流)、SOCK_DGRAM(不可靠数据报)和SOCK_SEQPACKET(可靠有序数据报),并分析了它们在ROS中的适用场景。随后通过C++代码详细展示了面向对象的UDS服务器实现,包括信号处理、套接字初始化、客户端连接管理和消息处
0. 引言
在机器人操作系统(ROS)的架构设计中,进程间通信(IPC)是核心组件之一。传统的ROS通信主要依赖TCP/IP协议栈,但在同一主机上的进程间通信场景中,Unix Domain Socket (UDS)提供了更高效、更可靠的解决方案。本文将深入探讨UDS在C++ ROS环境中的应用,从理论基础到实际代码实现,为读者提供全面的技术指导。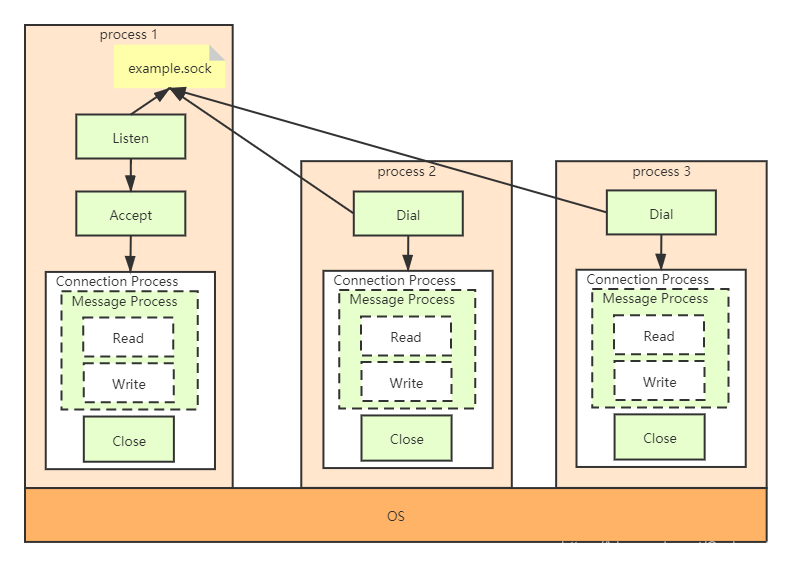
1. Unix Domain Socket基础理论
1.1 什么是Unix Domain Socket
Unix Domain Socket是一种特殊的IPC机制,它允许运行在同一台主机上的进程通过文件系统路径进行通信。与传统的Internet Socket不同,UDS不需要经过网络协议栈,数据直接在内存中传输,因此具有更高的性能和更低的延迟。
UDS的核心优势在于其简化的通信模型。传统的TCP/IP通信需要经过复杂的网络协议栈处理,包括IP头封装、TCP段分割、校验和计算、路由选择等步骤。而UDS完全绕过了这些开销,数据直接从发送进程的用户空间拷贝到接收进程的用户空间,整个过程都在内核内存中进行,无需磁盘I/O操作。
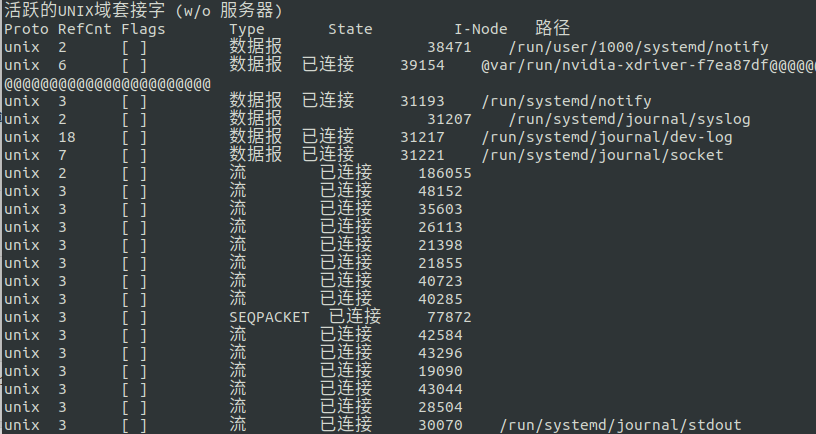
1.2 UDS的三种通信类型
UDS支持三种主要的通信类型,每种类型都有其特定的应用场景和性能特征。这些类型的选择直接影响着应用程序的性能表现和可靠性要求。
1. SOCK_STREAM (流套接字)
SOCK_STREAM提供有序、可靠、面向连接的双向字节流通信,其工作方式与TCP协议非常相似。这种类型的套接字确保数据按照发送顺序无差错到达,并且需要显式建立连接(通过listen()、accept()、connect()等系统调用)。SOCK_STREAM特别适用于需要保证数据完整性和顺序性的场景,如文件传输、数据库连接等。在ROS环境中,这种类型常用于需要可靠数据传输的配置同步、参数服务器通信等场景。
2. SOCK_DGRAM (数据报套接字)
SOCK_DGRAM提供无连接、不可靠、有边界的数据报通信,类似于UDP协议的工作方式。这种类型的套接字对消息大小有限制,数据可能丢失或乱序,但具有更低的延迟和更高的实时性。SOCK_DGRAM特别适用于对实时性要求极高但允许少量数据丢失的场景,如传感器数据流传输、实时控制指令等。在机器人系统中,激光雷达数据、摄像头图像流等高频数据传输场景中,SOCK_DGRAM可以提供更好的性能表现。
3. SOCK_SEQPACKET (序列数据包套接字)
SOCK_SEQPACKET是一种介于流套接字和数据报套接字之间的通信类型,它提供有序、可靠、有边界的数据报通信。每条消息作为独立单元发送,接收顺序与发送顺序一致,同时保证消息的可靠交付。这种类型特别适用于需要消息边界但又要保证可靠性的场景,如ROS节点间的命令传输、状态同步等。SOCK_SEQPACKET在保持消息完整性的同时,还提供了更好的消息分割和重组能力。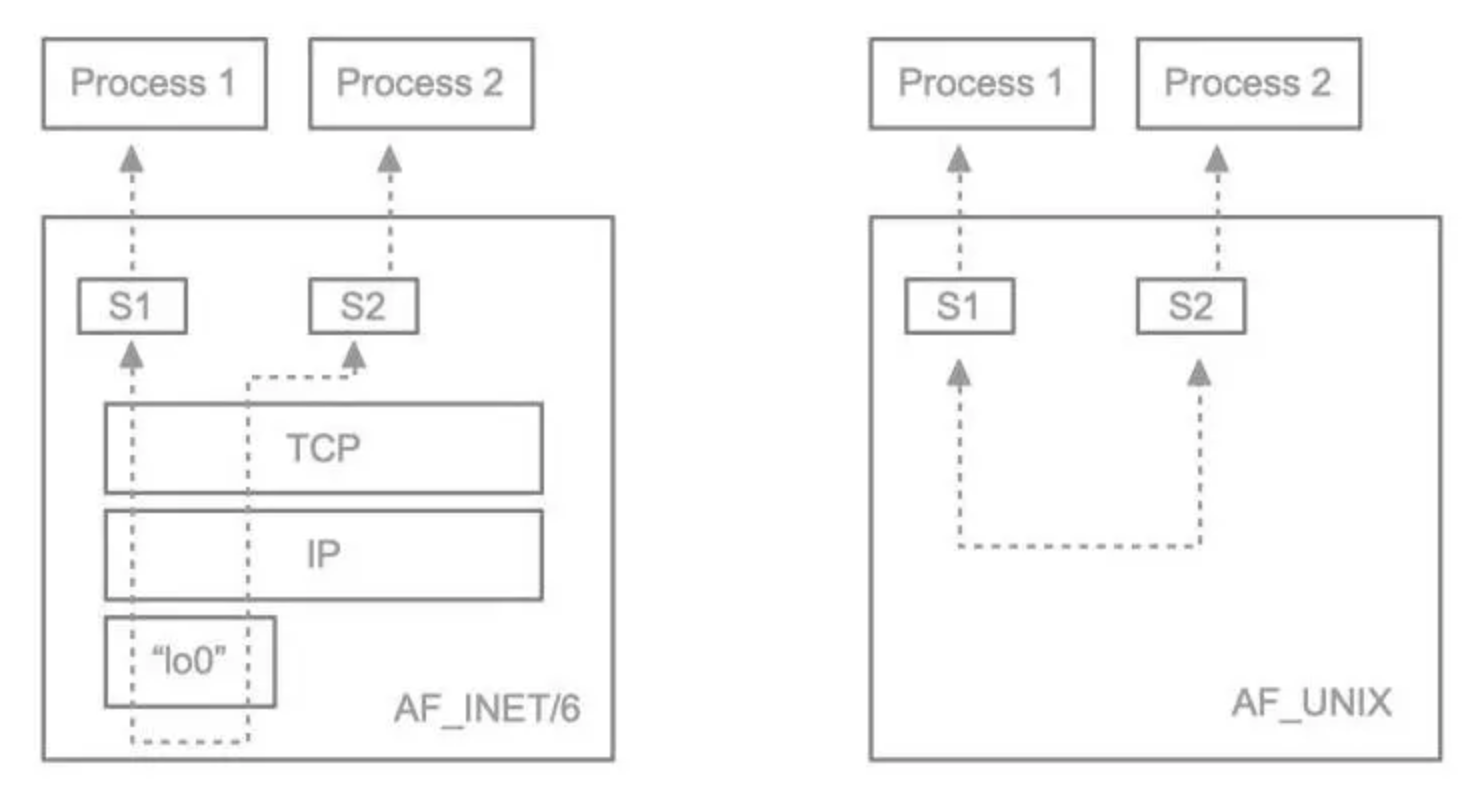
2. C++ UDS编程实践
2.1 基础UDS服务器实现
在实际的ROS开发中,UDS服务器的实现需要考虑多种因素,包括错误处理、资源管理、并发连接等。下面是一个完整的C++ UDS服务器实现示例,展示了如何使用SOCK_SEQPACKET类型创建可靠的UDS服务器。这个实现采用了面向对象的设计模式,提供了良好的封装性和可维护性,同时包含了完善的错误处理机制和资源清理功能。
#include <iostream>
#include <sys/socket.h>
#include <sys/un.h>
#include <unistd.h>
#include <cstring>
#include <signal.h>
#include <sys/stat.h>
class UDSServer {
private:
static constexpr const char* SOCKET_PATH = "/tmp/ros_uds_server.sock";
static constexpr int MAX_MSG_SIZE = 1024;
static constexpr int BACKLOG = 5;
int server_fd_;
volatile sig_atomic_t running_;
void handle_signal(int sig) {
running_ = 0;
std::cout << "\n接收到信号 " << sig << ",正在关闭服务器..." << std::endl;
}
static void signal_handler(int sig) {
// 静态方法无法直接访问成员变量,这里简化处理
std::cout << "\n接收到信号 " << sig << std::endl;
}
public:
UDSServer() : server_fd_(-1), running_(1) {}
~UDSServer() {
cleanup();
}
bool initialize() {
// 注册信号处理
struct sigaction sa;
sa.sa_handler = signal_handler;
sigemptyset(&sa.sa_mask);
sa.sa_flags = 0;
sigaction(SIGINT, &sa, nullptr);
sigaction(SIGTERM, &sa, nullptr);
// 创建套接字
server_fd_ = socket(AF_UNIX, SOCK_SEQPACKET, 0);
if (server_fd_ == -1) {
std::cerr << "套接字创建失败: " << strerror(errno) << std::endl;
return false;
}
// 设置套接字选项
int reuse = 1;
if (setsockopt(server_fd_, SOL_SOCKET, SO_REUSEADDR, &reuse, sizeof(reuse)) == -1) {
std::cerr << "设置套接字选项失败: " << strerror(errno) << std::endl;
}
// 设置地址结构
struct sockaddr_un addr;
memset(&addr, 0, sizeof(addr));
addr.sun_family = AF_UNIX;
strncpy(addr.sun_path, SOCKET_PATH, sizeof(addr.sun_path) - 1);
// 删除可能存在的套接字文件
unlink(SOCKET_PATH);
// 绑定套接字
if (bind(server_fd_, (struct sockaddr*)&addr, sizeof(addr)) == -1) {
std::cerr << "绑定失败: " << strerror(errno) << std::endl;
close(server_fd_);
return false;
}
// 设置文件权限
chmod(SOCKET_PATH, 0666);
// 开始监听
if (listen(server_fd_, BACKLOG) == -1) {
std::cerr << "监听失败: " << strerror(errno) << std::endl;
close(server_fd_);
unlink(SOCKET_PATH);
return false;
}
std::cout << "UDS服务器已启动,监听路径: " << SOCKET_PATH << std::endl;
return true;
}
void run() {
while (running_) {
int client_fd = accept(server_fd_, nullptr, nullptr);
if (client_fd == -1) {
if (running_) {
std::cerr << "接受连接失败: " << strerror(errno) << std::endl;
}
continue;
}
std::cout << "客户端已连接,文件描述符: " << client_fd << std::endl;
handle_client(client_fd);
close(client_fd);
}
}
private:
void handle_client(int client_fd) {
char buffer[MAX_MSG_SIZE + 1];
while (running_) {
ssize_t bytes_read = read(client_fd, buffer, MAX_MSG_SIZE);
if (bytes_read == -1) {
std::cerr << "读取数据失败: " << strerror(errno) << std::endl;
break;
} else if (bytes_read == 0) {
std::cout << "客户端断开连接" << std::endl;
break;
}
buffer[bytes_read] = '\0';
std::cout << "收到消息 (" << bytes_read << "字节): " << buffer << std::endl;
// 构建响应
std::string response = "服务器确认: " + std::string(buffer);
ssize_t resp_len = response.length();
if (write(client_fd, response.c_str(), resp_len) != resp_len) {
std::cerr << "发送响应失败: " << strerror(errno) << std::endl;
break;
}
std::cout << "已发送响应: " << response << std::endl;
}
}
void cleanup() {
if (server_fd_ != -1) {
close(server_fd_);
server_fd_ = -1;
}
unlink(SOCKET_PATH);
std::cout << "服务器已关闭,资源已清理" << std::endl;
}
};
int main() {
UDSServer server;
if (!server.initialize()) {
std::cerr << "服务器初始化失败" << std::endl;
return 1;
}
server.run();
return 0;
}
2.2 基础UDS客户端实现
UDS客户端的设计同样需要考虑连接管理、数据传输效率和错误恢复等关键因素。对应的客户端实现展示了如何连接到UDS服务器并进行高效的数据交换。这个客户端实现采用了智能的资源管理策略,确保在连接异常或程序退出时能够正确释放系统资源,同时提供了灵活的消息发送和接收接口,支持多种数据类型的传输。
#include <iostream>
#include <sys/socket.h>
#include <sys/un.h>
#include <unistd.h>
#include <cstring>
#include <vector>
#include <chrono>
#include <thread>
class UDSClient {
private:
static constexpr const char* SOCKET_PATH = "/tmp/ros_uds_server.sock";
static constexpr int MAX_MSG_SIZE = 1024;
int client_fd_;
public:
UDSClient() : client_fd_(-1) {}
~UDSClient() {
if (client_fd_ != -1) {
close(client_fd_);
}
}
bool connect() {
// 创建套接字
client_fd_ = socket(AF_UNIX, SOCK_SEQPACKET, 0);
if (client_fd_ == -1) {
std::cerr << "套接字创建失败: " << strerror(errno) << std::endl;
return false;
}
// 设置地址结构
struct sockaddr_un addr;
memset(&addr, 0, sizeof(addr));
addr.sun_family = AF_UNIX;
strncpy(addr.sun_path, SOCKET_PATH, sizeof(addr.sun_path) - 1);
// 连接到服务器
if (::connect(client_fd_, (struct sockaddr*)&addr, sizeof(addr)) == -1) {
std::cerr << "连接失败: " << strerror(errno) << std::endl;
close(client_fd_);
client_fd_ = -1;
return false;
}
std::cout << "已连接到UDS服务器: " << SOCKET_PATH << std::endl;
return true;
}
bool send_message(const std::string& message) {
if (client_fd_ == -1) {
std::cerr << "客户端未连接" << std::endl;
return false;
}
ssize_t sent = write(client_fd_, message.c_str(), message.length());
if (sent != static_cast<ssize_t>(message.length())) {
std::cerr << "发送消息失败: " << strerror(errno) << std::endl;
return false;
}
std::cout << "已发送消息 (" << sent << "字节): " << message << std::endl;
return true;
}
std::string receive_response() {
if (client_fd_ == -1) {
std::cerr << "客户端未连接" << std::endl;
return "";
}
char buffer[MAX_MSG_SIZE + 1];
ssize_t bytes_read = read(client_fd_, buffer, MAX_MSG_SIZE);
if (bytes_read == -1) {
std::cerr << "接收响应失败: " << strerror(errno) << std::endl;
return "";
} else if (bytes_read == 0) {
std::cout << "服务器断开连接" << std::endl;
return "";
}
buffer[bytes_read] = '\0';
std::string response(buffer);
std::cout << "收到响应 (" << bytes_read << "字节): " << response << std::endl;
return response;
}
void disconnect() {
if (client_fd_ != -1) {
close(client_fd_);
client_fd_ = -1;
std::cout << "已断开连接" << std::endl;
}
}
};
int main() {
UDSClient client;
if (!client.connect()) {
std::cerr << "连接服务器失败" << std::endl;
return 1;
}
// 测试消息列表
std::vector<std::string> test_messages = {
"Hello, UDS Server!",
"这是第二条测试消息",
"ROS节点间通信测试",
"性能测试消息 - " + std::string(100, 'A')
};
for (const auto& msg : test_messages) {
if (!client.send_message(msg)) {
std::cerr << "发送消息失败" << std::endl;
break;
}
std::string response = client.receive_response();
if (response.empty()) {
std::cerr << "接收响应失败" << std::endl;
break;
}
std::cout << "---" << std::endl;
std::this_thread::sleep_for(std::chrono::milliseconds(500));
}
client.disconnect();
return 0;
}
3. ROS与UDS的集成应用
3.1 ROS节点间UDS通信架构
在ROS的分布式架构中,节点间的通信效率直接影响着整个系统的性能表现。传统的ROS通信机制虽然功能强大,但在某些高性能场景下可能存在延迟和吞吐量的限制。通过将UDS作为节点间通信的补充机制,我们可以在保持ROS架构灵活性的同时,显著提升系统的性能表现。这种集成方案特别适用于需要高频率数据传输的场景,如传感器数据处理、实时控制指令传输等。以下是一个完整的ROS节点UDS通信示例,展示了如何在实际项目中实现这种集成方案。
…详情请参照古月居

有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐

 18
18 0
0- 0



 已为社区贡献132条内容
已为社区贡献132条内容

所有评论(0)