攻克Sim to Real Gap:机器人智能落地的关键突破
摘要: "Sim2RealGap"指仿真训练模型迁移到现实时性能下降的现象,源于物理建模偏差、感知信息差异和环境细节缺失。核心影响包括智能体在现实中的失效行为(如机械臂抓取失败)。解决思路分为四类:1)增强仿真真实性(高保真物理建模、域随机化);2)优化模型泛化能力(迁移学习、元学习);3)硬件在环(HIL)实现虚实闭环交互;4)结合少量现实数据微调。实际应用中需多方法协同,如
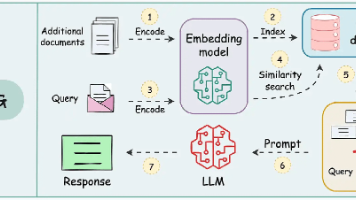
“Sim to Real Gap(仿真到现实差距)”是机器人学、强化学习等领域的核心挑战,指在虚拟仿真环境中训练出的模型/智能体,迁移到真实物理世界时性能大幅下降甚至失效的现象。其本质是虚拟场景与现实世界的“不匹配”,核心源于两类关键差异:
1. 核心成因:仿真与现实的底层不匹配
物理建模偏差:仿真环境中对物理规律的模拟是“简化版”——比如物体的摩擦力、重力、碰撞反馈、材质硬度等,无法100%复现现实中的复杂物理特性(例如仿真中“光滑桌面”无摩擦,现实中却存在微小阻力)。
感知信息差异:仿真环境的传感器数据(如视觉图像、触觉反馈)是“生成式”的(分辨率、光照、噪声固定),而现实中传感器会受光照变化、镜头畸变、环境噪声(如灰尘、遮挡)影响,导致模型对“真实感知信号”识别失效。
环境细节缺失:仿真场景通常是“结构化、单一化”的(如固定的房间布局、无随机干扰),但现实世界存在大量不可控变量(如突发的障碍物、温度湿度变化、设备微小故障),这些在仿真中未被训练的“边缘情况”,会让智能体难以应对。
2. 核心影响:限制智能体的落地应用
若无法弥补Sim2Real Gap,即便在仿真中表现完美的智能体(如机器人抓取物体、自动驾驶决策),到现实中可能出现“低级错误”——例如仿真中能精准抓取的机械臂,现实中因物理偏差导致物体滑落;仿真中稳定避障的自动驾驶模型,现实中因光照变化无法识别交通标志。
3. 常见缓解思路
领域内通常通过“缩小仿真与现实的差异”来降低Gap,例如: 增强仿真真实性:在仿真中加入随机噪声(如视觉噪声、物理参数扰动),模拟现实的不确定性;迁移学习优化:在真实环境中用少量数据“微调”仿真训练的模型,让其适应现实特性; 硬件在环(HIL):将真实硬件(如机械臂关节、传感器)接入仿真系统,让仿真更贴近物理硬件的实际响应。
根据技术逻辑,可将主流解决方法分为四大类,每类包含具体技术路径及应用场景:
一、增强仿真环境的“真实性”,让虚拟更贴近现实
通过优化仿真环境的物理建模、感知模拟和细节还原,从源头减少与现实的偏差,是最基础的解决思路。
1. 高保真物理建模
核心:突破“简化物理规则”的局限,精准复现现实中的物理特性。
具体手段:
引入动态物理参数库,例如针对不同材质(金属、布料、塑料)预设真实摩擦系数、弹性模量、碰撞恢复系数,而非仿真中默认的“统一参数”;
支持复杂物理效应,模拟现实中的流体阻力(如机器人在水中运动)、柔性物体形变(如抓取布料)、多物体耦合作用(如堆叠箱子的相互挤压)。
典型工具:NVIDIA PhysX(支持高精度刚体/柔体模拟)、MuJoCo(机器人领域常用的高保真物理引擎)。
2. 感知信号模拟增强
核心:让仿真生成的传感器数据(视觉、触觉、听觉)与现实传感器输出一致,避免模型“认不出真实信号”。
具体手段:
视觉噪声注入,在仿真图像中添加现实相机的噪声(高斯噪声、椒盐噪声)、镜头畸变(桶形/枕形畸变)、光照变化(强光、阴影、逆光);
多模态感知融合,仿真中同步生成触觉反馈(如机械臂抓取时的压力分布)、听觉信号(如电机运转声、碰撞声),而非仅依赖视觉;
域随机化(Domain Randomization),随机调整仿真中的环境细节(如物体颜色、纹理、光照强度、相机角度),迫使模型学习“本质特征”而非“仿真特有特征”(例如让自动驾驶模型忽略仿真中的固定光照,专注识别交通标志的形状)。
3. 环境细节与不确定性还原
核心:在仿真中加入现实世界的“不可控变量”,避免模型只适应“结构化场景”。
具体手段:
随机生成干扰因素,如仿真场景中突然出现的障碍物(纸箱、行人)、设备微小故障(机械臂关节延迟)、环境动态变化(风吹动物体);
构建“非结构化场景库”,模拟现实中的杂乱环境(如堆满杂物的桌面、拥挤的街道),而非仿真默认的“整洁场景”。
二、优化模型的“泛化能力”,让模型能“适应差异”
即使仿真无法100%还原现实,也可通过算法优化,让模型在训练阶段就具备“应对未知差异”的能力。
1. 迁移学习(Transfer Learning)
核心逻辑:先在仿真中用大量数据训练“基础模型”,再用真实环境的少量数据“微调”模型,使其快速适应现实。
具体场景:
机器人抓取:仿真中训练“抓取基础动作”,现实中用10-20次真实抓取数据微调,解决“仿真与现实重力偏差导致的抓取偏移”;
自动驾驶:仿真中训练“避障决策框架”,现实中用少量真实道路数据调整“光照敏感区域的识别阈值”。
关键技术:冻结基础模型的“特征提取层”(保留仿真中学习的通用特征),仅微调“输出决策层”(适配现实差异)。
2. 元学习(Meta-Learning)
核心逻辑:让模型在仿真中学习“快速适应新环境的能力”(即“学会学习”),而非仅学习“特定场景的任务”。
具体手段:
在仿真中构建大量“差异化子场景”(如不同重力、摩擦力的场景),让模型训练“从少量数据中调整参数的策略”;
例如:机械臂在仿真中学习“根据抓取物体的重量,1-2次尝试后调整握力”,迁移到现实中时,可快速适应真实物体的重量差异。
3. 鲁棒性训练(Robust Training)
核心逻辑:在仿真训练中主动“制造偏差”,迫使模型对“差异”不敏感。
具体手段:
对抗性训练:通过算法生成“仿真与现实的差异干扰”(如对仿真图像添加“现实风格的噪声”),让模型在干扰下仍能完成任务;
参数扰动训练:随机波动仿真中的物理参数(如重力±10%、摩擦力±15%),让模型学习“参数变化时的鲁棒决策策略”。
三、硬件与仿真的“闭环融合”,打通虚拟与现实的交互
通过将真实硬件或物理信号接入仿真系统,让仿真“感知真实反馈”,减少“硬件-仿真”的脱节。
1. 硬件在环(Hardware-in-the-Loop, HIL)
核心:将真实物理硬件(如机器人关节、传感器、控制器)接入仿真环境,让仿真的“虚拟决策”驱动真实硬件,同时真实硬件的“物理反馈”回传仿真,形成闭环。
具体流程:
1. 仿真系统生成“机械臂抓取指令”;
2. 指令发送给真实机械臂的控制器,驱动机械臂执行动作;
3. 机械臂的力传感器将“真实抓取力”回传仿真;
4. 仿真根据真实反馈调整后续指令(如若抓取力不足,仿真修正“握力参数”)。
优势:解决“仿真中硬件模型与真实硬件性能差异”(如仿真中机械臂无延迟,现实中有0.1秒延迟),常见于工业机器人、自动驾驶控制器测试。
2. 数据在环(Data-in-the-Loop, DIL)
核心:用真实世界的传感器数据(如相机图像、雷达点云)“喂养”仿真系统,让仿真生成的感知数据更贴近现实。
具体手段:
建立“真实数据-仿真数据”映射库:例如将真实道路的10万张图像,与仿真中生成的“对应场景图像”配对,训练仿真的“视觉生成模型”,使其生成的图像风格与真实一致;
实时注入真实数据:在仿真训练中,随机插入真实传感器数据(如突然用真实的“雨天摄像头图像”替换仿真图像),让模型适应真实数据的特征。
四、纯现实数据驱动,绕过仿真直接学习
当Sim2Real Gap难以通过仿真优化解决时,可结合少量现实数据直接训练,作为仿真迁移的补充。
1. 少量样本学习(Few-Shot Learning)
核心:用仿真模型的“特征提取能力”,结合现实中极少量(如5-10个)样本,快速训练现实任务模型。
例如:仿真中训练“物体识别的特征网络”,现实中用5张真实“苹果”图像,微调网络以识别真实苹果(而非仿真中的“卡通苹果”)。
2. 强化学习的现实微调(Real-World Fine-Tuning for RL)
核心:在现实环境中用“安全探索策略”微调仿真训练的强化学习模型,避免模型在现实中“犯错”。
具体手段:
初期用“保守策略”:让机器人以低速度、小力度执行动作,收集现实反馈;
逐步优化:根据现实反馈调整动作参数(如机械臂抓取力度从“仿真推荐值”逐步调整到“现实合适值”)。
因此,解决Sim2Real Gap通常需“多方法结合”——例如用“高保真仿真+域随机化”训练基础模型,再通过“少量现实数据迁移学习”微调,最后用“硬件在环”验证安全性,形成完整的技术闭环。

有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐

 2
2 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)