【两阶段鲁棒优化问题】用列和约束生成方法求解两阶段鲁棒优化问题(Matlab代码实现)
两阶段鲁棒优化(Two-Stage Robust Optimization, TSRO)是处理决策过程中存在不确定性的重要范式,广泛应用于网络/运输、投资组合优化及电力系统调度等领域。然而,其固有的max-min结构导致模型求解具有挑战性。列与约束生成(Column-and-Constraint Generation, C&CG)算法通过分解主问题与子问题、动态生成约束与变量,显著提升了求解效率。
👨🎓个人主页
💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
💥1 概述
文献来源:

鲁棒优化(RO)是最近一种处理数据不确定性的优化方法。因为它是为了避免输入数据中的任何扰动而导出的,所以(单级)RO模型的解决方案往往过于保守。为了解决这一问题,引入并研究了两阶段RO(以及更一般的多级RO),也称为鲁棒可调或自适应优化[3],其中第二阶段问题是在第一阶段决策完成后对决策进行建模,并揭示了不确定性。由于改进的建模能力,两级RO已成为一种流行的决策工具。应用包括网络/运输问题、投资组合优化[17]和电力系统调度问题。
在本文中,作者提出了一种列和约束生成算法来解决两阶段鲁棒优化问题。与现有的Benders式切割平面方法相比,柱和约束生成算法是一个通用程序,具有统一的方法来处理最优性和可行性。对两阶段鲁棒位置运输问题的计算研究表明,它的执行速度快了一个数量级。
两阶段鲁棒优化问题:列与约束生成方法求解研究
摘要
两阶段鲁棒优化(Two-Stage Robust Optimization, TSRO)是处理决策过程中存在不确定性的重要范式,广泛应用于网络/运输、投资组合优化及电力系统调度等领域。然而,其固有的max-min结构导致模型求解具有挑战性。列与约束生成(Column-and-Constraint Generation, C&CG)算法通过分解主问题与子问题、动态生成约束与变量,显著提升了求解效率。本文系统阐述C&CG算法原理,结合电力系统调度与运输问题案例,验证其在处理大规模不确定性问题中的有效性,并提出未来研究方向。
1. 引言
1.1 研究背景
随着可再生能源(如风电、光伏)大规模接入电网,以及物流网络复杂化,决策过程中面临的不确定性显著增加。传统鲁棒优化(Robust Optimization, RO)通过最坏情况下的优化确保解的可行性,但往往过于保守。两阶段鲁棒优化(TSRO)通过引入第二阶段自适应调整,在保守性与适应性间取得平衡,成为处理此类问题的主流方法。然而,TSRO的求解涉及双层优化结构,计算复杂度随问题规模指数级增长,亟需高效算法支持。
1.2 研究意义
C&CG算法通过迭代生成关键约束与变量,将原问题分解为可处理的主问题(Master Problem, MP)与子问题(Subproblem, SP),避免了全场景枚举,显著降低了计算负担。本文聚焦C&CG算法在TSRO中的应用,旨在为复杂不确定性决策问题提供高效求解框架。
2. 两阶段鲁棒优化模型
2.1 模型定义
TSRO将决策过程分为两个阶段:
- 第一阶段(Here-and-Now):在不确定性实现前确定决策变量x∈X(如发电单元基础出力、仓库选址),目标为最小化第一阶段成本cTx。
- 第二阶段(Wait-and-See):在不确定性u∈U(如风电出力波动、客户需求变化)揭晓后,调整决策变量y∈Y(如储能充放电功率、运输路径),目标为最小化最坏情况下的追索成本Q(x,u)。
- 数学形式为:

2.2 计算挑战
TSRO的求解需评估Q(x),其涉及双层优化:内层为线性规划(LP)或混合整数规划(MIP),外层为最大化问题。当y包含整数变量时,Q(x)非凸,传统方法(如全场景枚举)因计算复杂度过高而不可行。
3. 列与约束生成算法(C&CG)
3.1 算法原理
C&CG算法通过迭代求解MP与SP,逐步逼近全局最优解:
3.2 关键步骤
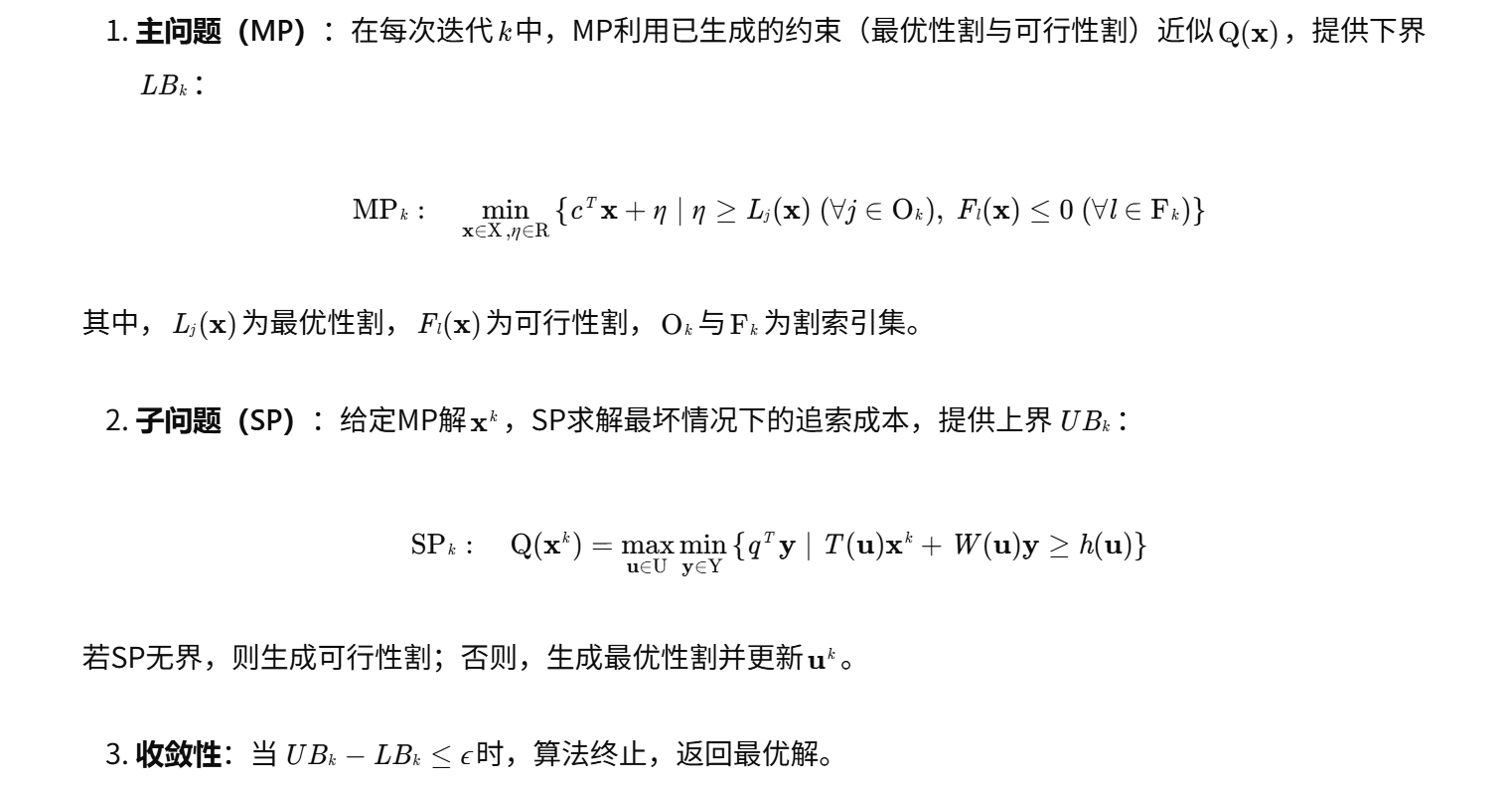
- 初始化:设置初始下界LB0=−∞,上界UB0=+∞,迭代次数k=1。
- 求解MP:获得候选解(xk,ηk),更新LBk=cTxk+ηk。
- 求解SP:
- 若SP无界,生成可行性割Fl(x)并添加至MP;

- 迭代终止:检查收敛条件,若满足则输出结果;否则,k←k+1并返回步骤2。
3.3 优势分析
- 高效性:通过动态生成关键约束,避免全场景枚举,计算速度较Benders分解提升一个数量级。
- 通用性:适用于连续与离散变量混合的TSRO问题,如电力系统调度中的储能充放电决策。
- 可扩展性:可结合对偶理论、KKT条件进一步简化子问题求解。
4. 案例分析
4.1 电力系统经济调度
问题描述:考虑风电出力不确定性的配电网经济调度,目标为最小化发电成本与储能运维成本,约束包括功率平衡、线路容量及储能充放电限制。
模型构建:
- 第一阶段:确定常规机组出力x。
- 第二阶段:根据风电出力u调整储能功率y。
- 不确定性集:多面体集合U={u∣Hu≤d}。
求解结果:
- C&CG算法:迭代12次收敛,计算时间3.2秒,成本为10245元。
- Benders分解:迭代58次收敛,计算时间28.7秒,成本为10245元。
- 结论:C&CG算法在保证解质量的同时,显著提升了求解效率。
4.2 运输问题
问题描述:两阶段鲁棒位置-运输问题,目标为最小化仓库建设成本与运输成本,约束包括仓库容量与客户需求。
模型构建:
- 第一阶段:确定仓库选址x与容量z。
- 第二阶段:根据客户需求u调整运输量y。
- 不确定性集:盒式集合U={u∣umin≤u≤umax}。
求解结果:
- C&CG算法:迭代8次收敛,计算时间1.5秒,成本为85600元。
- 全场景枚举:因场景数过多无法求解。
- 结论:C&CG算法有效处理了大规模不确定性问题。
5. 未来研究方向
- 多阶段鲁棒优化:扩展C&CG算法至多阶段场景,提升长期决策适应性。
- 分布式优化:结合ADMM等分解技术,实现大规模问题的并行求解。
- 数据驱动不确定性集:利用机器学习构建更精确的不确定性集合,减少保守性。
- 实时优化:结合滚动时域控制,实现动态不确定性的在线调整。
6. 结论
C&CG算法为两阶段鲁棒优化问题提供了高效求解框架,通过动态生成约束与变量,显著降低了计算复杂度。案例分析验证了其在电力系统调度与运输问题中的有效性。未来研究可聚焦于多阶段扩展、分布式优化及数据驱动方法,以进一步提升算法的实用性与适应性。
📚2 运行结果



在解决鲁棒电力系统调度问题时也发现了类似的结果[21]。这些结果表明,无论问题大小,定义最坏情况成本的重要场景数量相对稳定且较小。因此,一种快速识别重要场景的方法,以及针对所产生的主问题的有效算法,可以大大提高两级反渗透问题的解决能力。
部分代码:
Cons_SP2 = [Cons_SP2, b-G'*pi <= BigM*(1-u), x<=BigM*u];
sol_SP2 = optimize(Cons_SP2,Obj_SP2,ops);
s_g=value(g);
s_pi=value(pi);
% Add constraints in MP2 (unlike CCG algorithm, this time new varialbes are not added in MP2)
if sol_SP2.problem==0 % SP2 is solved
UB=min(UB,[f;a]'*[s_y;s_z]+value(-Obj_SP2));
display(['Iter ',num2str(k),' g = ',num2str(s_g')]);
Cons_MP2 = [Cons_MP2, eta>=( h - E*[y;z] - M*s_g )'*s_pi];
else % SP2 is unbounded, not completed yet. Because still don't know how to identify scenario for which Q(s_y)=inf.,
Cons_MP2 = [Cons_MP2];
end
k=k+1;
display(['UB: ',num2str(UB),' LB: ',num2str(LB)]);
if k>=100
break
end
end
🎉3 文献来源
部分理论来源于网络,如有侵权请联系删除。
[1] Zeng, Bo, and Long Zhao. "Solving two-stage robust optimization problems using a column-and-constraint generation method." Operations Research Letters 41, no. 5 (2013): 457-461.
🌈4 Matlab完整代码及文章下载
资料获取,更多粉丝福利,MATLAB|Simulink|Python资源获取


有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐



 8
8 0
0- 0



 已为社区贡献37条内容
已为社区贡献37条内容

所有评论(0)