DORA-RS:面向 AI 时代的新型机器人操作系统
DORA-RS是一款面向AI时代的机器人中间件,采用Rust语言开发,性能比ROS2快10-17倍。其核心优势包括:支持Python、Rust等多种语言降低开发门槛;采用数据流架构实现端边云协同;深度集成AI模型处理多模态数据。DORA-RS已构建覆盖芯片、传感器到整机的全链路生态,并与多所高校及企业开展合作。作为开源项目,DORA-RS正推动机器人开发从小众走向大众。
——让机器人开发从 C++ 走向人人可及
随着 AI 技术的蓬勃发展,机器人产业正迎来前所未有的变革机遇。然而,传统的机器人开发框架却仍停留在多年前的技术水平,复杂的 C++ 编程门槛让无数对机器人充满热情的开发者望而却步。在这样的背景下,DORA-RS(Dataflow-Oriented Robotic Architecture)应运而生,它以全新的设计理念和强大的技术优势,正在为机器人开发带来一场深刻的技术革命。
项目概况:下一代机器人中间件
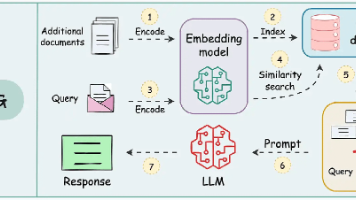
DORA-RS 是一个专为 AI 驱动的机器人应用设计的高性能中间件框架。它采用数据流导向的架构设计,提供低延迟、可组合和分布式的数据流处理能力,将机器人应用建模为有向图(也称为管道)。
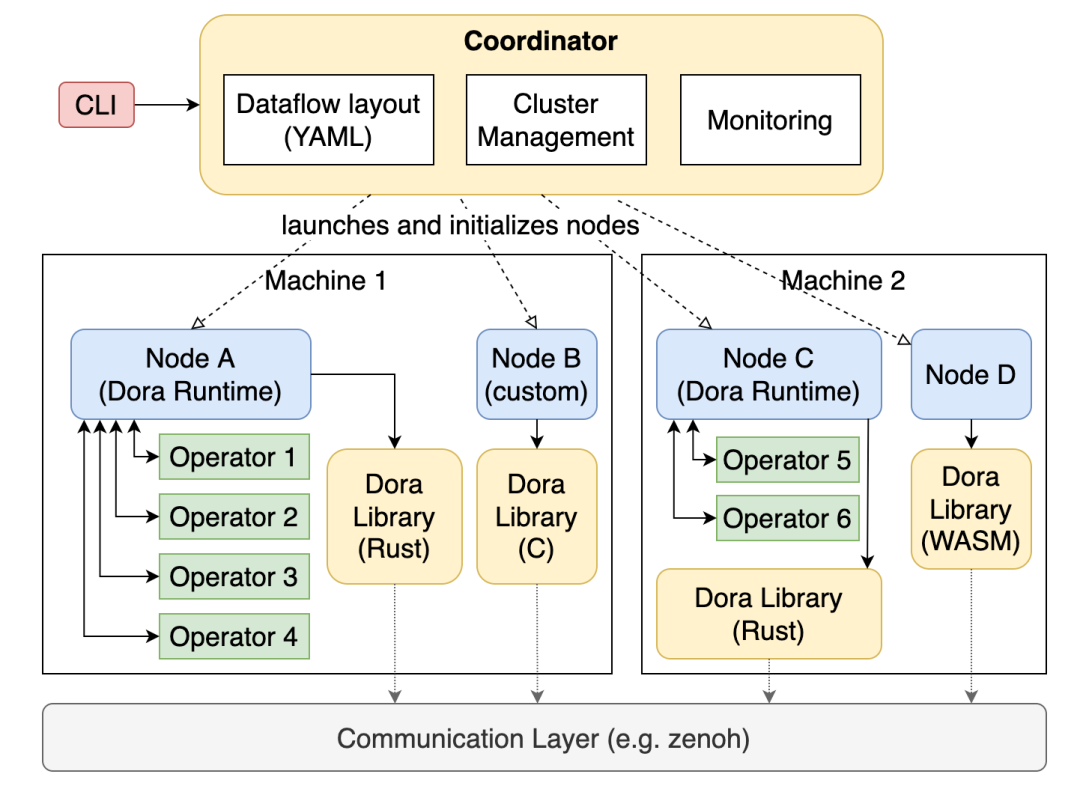
DORA-RS 技术架构
与传统机器人框架不同,DORA-RS 从底层采用 Rust 语言开发,充分利用了Rust 的内存安全和并发特性,同时避免了垃圾回收器带来的性能开销。这使得它在处理实时机器人任务时表现出色,性能比 ROS2 快 10-17 倍。
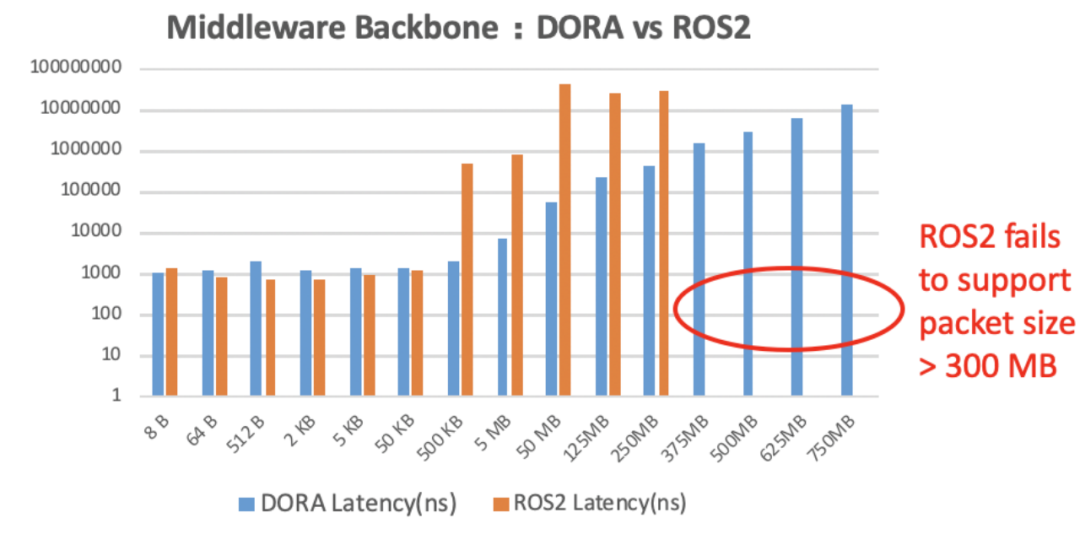
大数据包性能远超 ROS2
核心目标: 构建 AI 优先的机器人生态
降低开发门槛
DORA-RS 的首要目标是让机器人开发变得简单易用。它的目标受众包括对机器人感兴趣但可能没有精力花费数周时间编写 C 和 C++ 代码的人群,包括硕士生和博士生。通过支持 Python、Rust、C、C++ 等多种编程语言,开发者可以使用自己熟悉的语言快速上手。
端边云协同
DORA-RS 支持从设备端到边缘服务器再到云端的统一数据流架构,打破了传统 ROS 系统单机本地网络的限制,扩展到多异构主机和多网络设备的端边云环境。这种设计使得机器人能够充分利用云端的计算资源,实现更复杂的 AI 功能。
AI 深度集成
面向"AI 优先"的机器人时代,DORA-RS 针对 AI 从业者以及对 Python 有高性能需求的开发者进行了特别优化,提供了与 AI 模型的无缝集成能力。

DORA-RS 三大核心技术优势
进入 AI 时代,机器人不再是单纯的机械执行体,而是与大模型、语音交互、视觉理解深度结合的“智能体”。DORA-RS 在这一点上尤为突出,它的三大优势使其在兼容传统生态的同时,进一步降低了迁移和开发成本。
超高性能通信:
-
零拷贝通信:通过 Apache Arrow 和共享内存实现零拷贝数据传输,对Python 开发者友好;
-
CUDA 零拷贝:支持 PyTorch 的 CUDA 零拷贝,大幅提升 GPU 加速 AI 任务的性能;
-
智能内存管理:共享内存实现跟踪跨进程消息,自动丢弃过时数据,缓存内存槽避免重复分配;
模块化架构:
-
数据流编程范式:将任务分解为独立进程的节点,通过数据流连接,创建模块化和易配置的机器人应用;
-
分布式部署:支持单机共享内存通信和跨机器 TCP 通信;
-
热重载功能:支持 Python 实时修改和调试,无需重启整个系统;
开发友好特性:
-
预封装节点库(Node Hub):提供摄像头、传感器、执行器、AI 模型(物体检测、图像分割、大语言模型、视觉语言模型)、语音处理等预构建组件;
-
ROS2 桥接:提供与 ROS2 的无缝对接,保护现有投资,降低迁移成本;
-
可观测性:集成 OpenTelemetry,提供完整的日志、指标和追踪功能。

功能特性一览
核心中间件功能
进程间通信(IPC):高效的软件模块间数据交换和消息传递
硬件抽象:标准化接口访问和控制各种机器人硬件
数据封送:处理不同模块和编程语言间的数据格式转换
系统配置与管理:完整的组件配置、启动、监控和管理工具
生命周期管理:智能的节点启动、关闭和错误处理机制
AI 集成算法
DORA-RS 内置了丰富的 AI 算法支持:
多模态数据采集
-
同构臂数据采集
-
FastUMI 数据采集
-
VR 基础的沉浸式采集
-
远程操作采集
AI 推理算法
-
LeRobot ACT/DP(动作分块变换器/扩散策略)
-
Gr00T(通用机器人学习框架)
-
RDT1B(大规模机器人决策)
-
OpenVLA(视觉-语言-动作模型)
人机交互
-
Whisper 语音识别
-
Kokoro TTS 文本转语音
-
ArgosTranslate 实时翻译
-
多种大语言模型(Deepseek、Mistral、Llama-cpp 等)

如何搭建全球机器人全链路生态?
依托以上技术优势,DORA-RS 已与众多硬件厂商建立深度合作,涵盖车规级算力平台与国产 RISC-V+TPU、昇腾 AI 芯片、地平线、黑芝麻等芯片厂商,以及速腾激光雷达、镭神、灵明光子、奥比中光等传感器企业。同时,与瑞尔曼机械手臂、乐白、意优、OpenLoong、松灵机器人等机器人本体厂商展开联合研发,形成了从核心算力、感知设备到整机本体的全链路硬件生态。
在学术领域,DORA-RS 与多所国内外高校紧密协作:携手清华大学共建 Dora 鸿蒙创新中心并优化 ArceOS RTOS;与北京大学开展昇腾适配合作;与中国科学技术大学推进机器人移植项目,与重庆邮电大学合作开发鸿蒙下的导航系统与工具链,并与美国东北大学共同优化基于昇腾的 VLA 模型。
在产业落地方面,DORA-RS 与深圳 AIRS Lab 开展性能测试与验证,与北京智源研究院(BAAI)合作实现端到端机器人数据采集,与新讯智能共同打造基于 DORA 的商业化机器人产品,并与深开鸿推进鸿蒙机器人开发板的联合研发,为机器人产业提供从底层硬件到上层应用的整体解决方案。
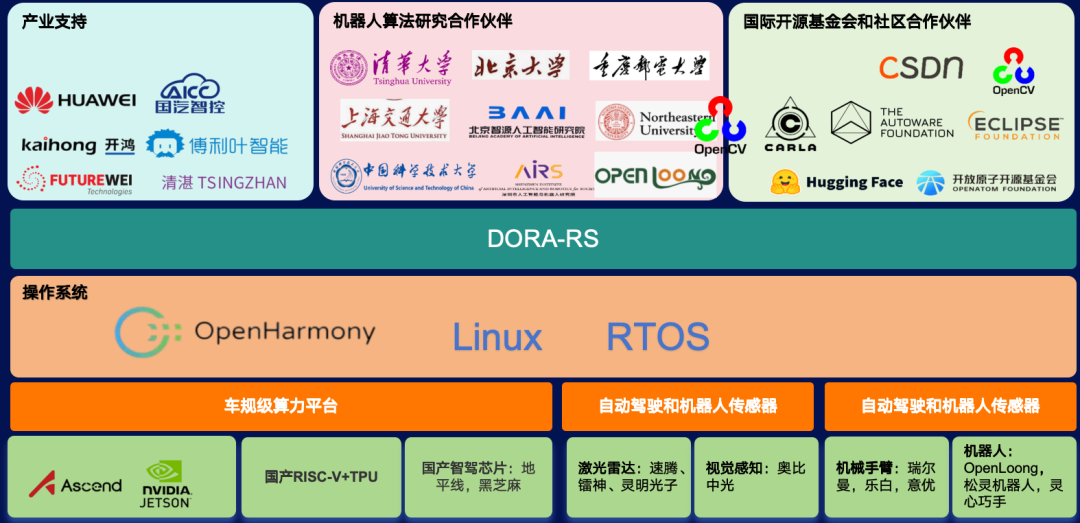
DORA-RS 生态伙伴

从开源到全栈,自主可控的 DORA-RS 机器人未来
另一方面,其社区的发展同样令人瞩目。截至 2025 年,DORA-RS GitHub 主仓库已获得 2,342 Star,拥有近百名活跃贡献者。知名 AI 公司 Hugging Face 联合创始人 Thomas Wolf 对DORA-RS 给予高度评价,称其为"ROS 的强力竞争替代方案"。
未来两年,DORA-RS 将按照技术路线图稳步推进,包括推出预集成机器人大模型的 ADORA 系列机器人,利用 Dora 分布式技术构建云端微调训练与推理自动化的数据平台,推进开源鸿蒙端侧算力硬件选型及适配,以及在昇腾平台上进行推理优化与机器人基础模型训练。
同时,基于 DORA 推出 MoFA(模法)AI 低代码机器人应用开发平台,支持基于数据流的声明式编程(YAML 数据流编排)、细粒度组合开发(支持 prompt、agent service、agent 的嵌套组合)、多种 AI 设计模式与应用模板,以及依托 Rust 平台实现的高性能云端协同计算能力。
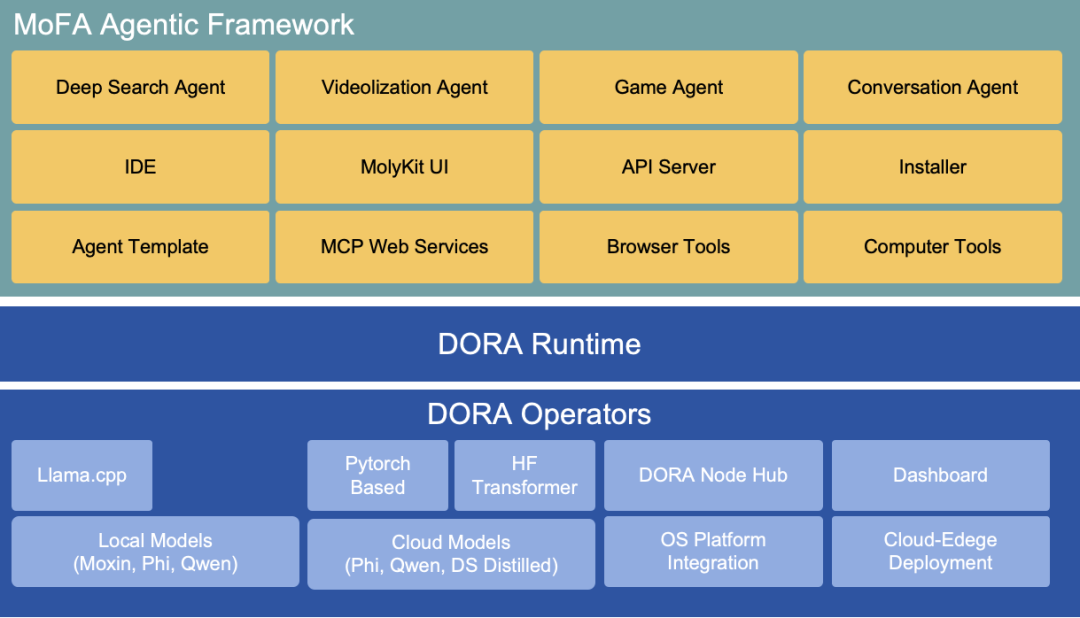
MOFA - AI 低代码机器人应用开发平台
根据国际研究机构数据,2024 年全球机器人操作系统市场规模已达 6.1-7.1 亿美元,预计到 2030 年将增长至 12-24 亿美元。在这一快速增长的市场中,DORA-RS 以其技术优势和生态建设,正成为重要参与者,并为我国机器人产业提供了一条自主可控的技术路径。通过与开源鸿蒙及国产芯片的深度结合,DORA-RS 正在构建软硬件全栈自主可控的机器人系统生态。
秉承开源开放的理念,DORA-RS 已捐献给开放原子开源基金会,欢迎全球开发者参与贡献。无论你是 AI 研究者、机器人工程师,还是编程爱好者,都可以在 DORA-RS 的生态中找到自己的位置。
让我们一起用 DORA-RS,让机器人开发从复杂走向简单,从小众走向大众,真正实现"人人都能开发机器人"的美好愿景!

DORA-RS 黑客松大赛杭州见!
在生态合作不断拓展的同时,DORA-RS 也通过一系列重要活动与里程碑事件,进一步展现了其在全球开源社区与学术产业界的影响力。在国际开源合作方面,DORA-RS 入选 Google Summer of Code 2025(GSoC)项目,受到全球开发者关注;在软件所 OSPP 夏令营中,推进了基于开源鸿蒙的 DORA 机器人样例场景开发;并在教育部大学生操作系统功能赛中引入开源鸿蒙技术栈,为系统功能优化与创新提供支持。
与此同时,DORA-RS 在赛事活动中的亮相同样引人注目。 GOSIM 2024 具身智能比赛成功举办,10 支参赛队伍使用统一的 DORA-RS 机器人开发套件,通过端云协同构建 AI 实践环境。赛事吸引了包括 CSDN、北京智源人工智能研究院、清华大学在内的众多生态伙伴积极参与,推动了具身智能技术的交流与落地。
今年 9 月 13-14 日,在 GOSIM HANGZHOU 2025 大会将举办 DORA-RS 相关主题的黑客松大赛,更多详情请点击阅读原文进入大会官网!

DORA-RS 官网:https://dora-rs.ai/
GitHub:https://github.com/dora-rs/dora
DORA-RS 社区:https://deepwiki.com/ZhangHanDong/dora
快速入门:https://www.kippal.ai/get-started-building-a-face-detection-app-with-dora/


有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐

 7
7 0
0- 0



 已为社区贡献169条内容
已为社区贡献169条内容

所有评论(0)