计算机大数据毕业设计YOLO+多模态大模型疲劳驾驶检测系统 自动驾驶 面部多信息特征融合的疲劳驾驶检测系统 驾驶员疲劳驾驶风险检测
计算机大数据毕业设计YOLO+多模态大模型疲劳驾驶检测系统 自动驾驶 面部多信息特征融合的疲劳驾驶检测系统 驾驶员疲劳驾驶风险检测
温馨提示:文末有 CSDN 平台官方提供的学长联系方式的名片!
温馨提示:文末有 CSDN 平台官方提供的学长联系方式的名片!
温馨提示:文末有 CSDN 平台官方提供的学长联系方式的名片!
信息安全/网络安全 大模型、大数据、深度学习领域中科院硕士在读,所有源码均一手开发!
感兴趣的可以先收藏起来,还有大家在毕设选题,项目以及论文编写等相关问题都可以给我留言咨询,希望帮助更多的人
介绍资料
以下是一篇关于《YOLO+多模态大模型疲劳驾驶检测系统在自动驾驶中的应用研究》的开题报告框架及内容示例,供参考:
开题报告
题目:YOLO+多模态大模型疲劳驾驶检测系统在自动驾驶中的应用研究
一、研究背景与意义
1.1 研究背景
随着自动驾驶技术的快速发展,L3及以上级别的自动驾驶系统逐步落地,但人机共驾阶段(Handover Period)仍存在安全隐患。疲劳驾驶是导致交通事故的重要原因之一,据统计,全球约20%的交通事故与驾驶员疲劳相关。传统疲劳检测方法(如基于PERCLOS、头部姿态估计等)存在单一模态数据局限性,难以适应复杂驾驶场景。
近年来,多模态融合技术与深度学习的发展为疲劳检测提供了新思路。YOLO(You Only Look Once)系列目标检测算法因其高效性和实时性被广泛应用于计算机视觉领域,而多模态大模型(如CLIP、GPT-4V等)通过融合视觉、语音、生理信号等多维度数据,显著提升了检测鲁棒性。因此,结合YOLO的实时检测能力与多模态大模型的语义理解能力,构建高精度、低延迟的疲劳驾驶检测系统,对自动驾驶安全具有重要意义。
1.2 研究意义
- 理论意义:探索YOLO与多模态大模型的协同优化方法,填补现有疲劳检测系统在跨模态数据融合与实时性平衡方面的研究空白。
- 实践意义:提升自动驾驶系统在人机共驾阶段的主动安全能力,降低因驾驶员疲劳导致的交通事故风险,推动自动驾驶商业化落地。
二、国内外研究现状
2.1 疲劳驾驶检测技术发展
- 单模态检测:基于视觉的PERCLOS(眼睑闭合时间)、头部姿态估计(如OpenPose)、面部表情识别(如FER2013数据集);基于生理信号的EEG、ECG检测;基于车辆状态的转向盘角度、车道偏离分析等。
- 多模态融合:结合视觉与生理信号(如DrowsyNet)、融合视觉与车辆状态(如Driver Monitoring System, DMS),但存在模态间时空对齐困难、计算资源消耗大等问题。
2.2 YOLO算法在驾驶场景的应用
YOLO系列(如YOLOv5、YOLOv8)因其端到端检测特性,被广泛应用于驾驶行为识别(如分心驾驶检测、行人检测),但在疲劳特征(如微睡眠、频繁眨眼)的精细化识别上仍需改进。
2.3 多模态大模型研究进展
以CLIP、Flamingo为代表的多模态模型通过对比学习或序列建模实现跨模态语义对齐,但存在以下问题:
- 实时性不足:大模型推理延迟高,难以满足车载场景需求;
- 数据依赖性强:需大量标注的多模态疲劳驾驶数据集;
- 模态适配性差:生理信号与视觉特征的融合机制尚未完善。
2.4 现有研究不足
- 缺乏轻量化多模态模型与YOLO的协同优化框架;
- 未充分利用自动驾驶场景中的多源异构数据(如车内摄像头、雷达、CAN总线信号);
- 实时性与准确性平衡问题未有效解决。
三、研究目标与内容
3.1 研究目标
构建基于YOLO+多模态大模型的疲劳驾驶检测系统,实现以下目标:
- 高精度检测:融合视觉、生理、车辆状态等多模态数据,提升复杂场景下的疲劳识别准确率;
- 实时性优化:通过模型轻量化与边缘计算部署,满足车载系统低延迟需求;
- 场景适应性:支持不同光照、天气、道路条件下的鲁棒检测。
3.2 研究内容
- 多模态数据采集与预处理
- 构建包含视觉(面部、眼部)、生理(心率、脑电)、车辆状态(方向盘转动、车道偏离)的多模态疲劳驾驶数据集;
- 设计数据对齐与增强方法,解决模态间时空不同步问题。
- YOLO与多模态模型协同优化
- 改进YOLOv8网络结构,引入注意力机制(如CBAM)提升疲劳特征提取能力;
- 设计轻量化多模态融合模块(如跨模态Transformer或知识蒸馏),降低大模型计算开销;
- 提出动态权重分配策略,根据驾驶场景自适应调整模态权重。
- 系统实现与边缘部署
- 基于ONNX Runtime或TensorRT优化模型推理速度;
- 在NVIDIA Jetson AGX Orin等边缘设备上部署,验证实时性(≥30FPS)与准确性(F1-score≥0.9)。
- 实验验证与对比分析
- 在公开数据集(如NTHU-Drowsy Driver、DriveSleep)及自建数据集上测试;
- 对比单模态基线模型(如YOLOv8-face、ResNet-EEG)与多模态融合模型的性能差异。
四、研究方法与技术路线
4.1 研究方法
- 深度学习框架:PyTorch、TensorFlow;
- 多模态融合算法:基于Transformer的跨模态注意力机制、图神经网络(GNN);
- 轻量化技术:模型剪枝、量化、知识蒸馏;
- 边缘计算部署:TensorRT加速、CUDA优化。
4.2 技术路线
数据采集 → 多模态预处理 → YOLO特征提取 → 跨模态融合 → 疲劳状态分类 → 边缘部署 → 实时检测 |
五、预期成果与创新点
5.1 预期成果
- 提出一种YOLO与多模态大模型的协同优化框架;
- 构建支持边缘部署的疲劳驾驶检测原型系统;
- 发表1-2篇SCI/EI论文,申请1项软件著作权。
5.2 创新点
- 跨模态动态融合机制:设计基于场景感知的模态权重分配策略,突破传统静态融合的局限性;
- 轻量化多模态模型:通过知识蒸馏将大模型语义知识迁移至YOLO框架,平衡精度与效率;
- 自动驾驶场景适配:结合车辆状态数据(如车道偏离、转向频率)提升检测鲁棒性。
六、研究计划与进度安排
| 阶段 | 时间 | 任务 |
|---|---|---|
| 1 | 202X.09-202X.12 | 文献调研、数据集构建、算法选型 |
| 2 | 202X.01-202X.06 | 多模态融合模型设计与实验 |
| 3 | 202X.07-202X.09 | 系统优化与边缘部署 |
| 4 | 202X.10-202X.12 | 论文撰写与答辩准备 |
七、参考文献
[1] Redmon J, Divvala S, Girshick R, et al. You Only Look Once: Unified, Real-Time Object Detection[C]. CVPR, 2016.
[2] Radford A, Kim J W, Hallacy C, et al. Learning Transferable Visual Models From Natural Language Supervision[J]. arXiv, 2021.
[3] 王伟等. 基于多模态融合的疲劳驾驶检测方法综述[J]. 汽车工程, 2022.
[4] NTHU-Drowsy Driver Dataset. [Online]. Available: https://www.dorm.ee.nthu.edu.tw.
备注:可根据实际研究方向调整技术细节(如多模态融合算法选择、数据集规模等),并补充具体实验环境与硬件配置说明。
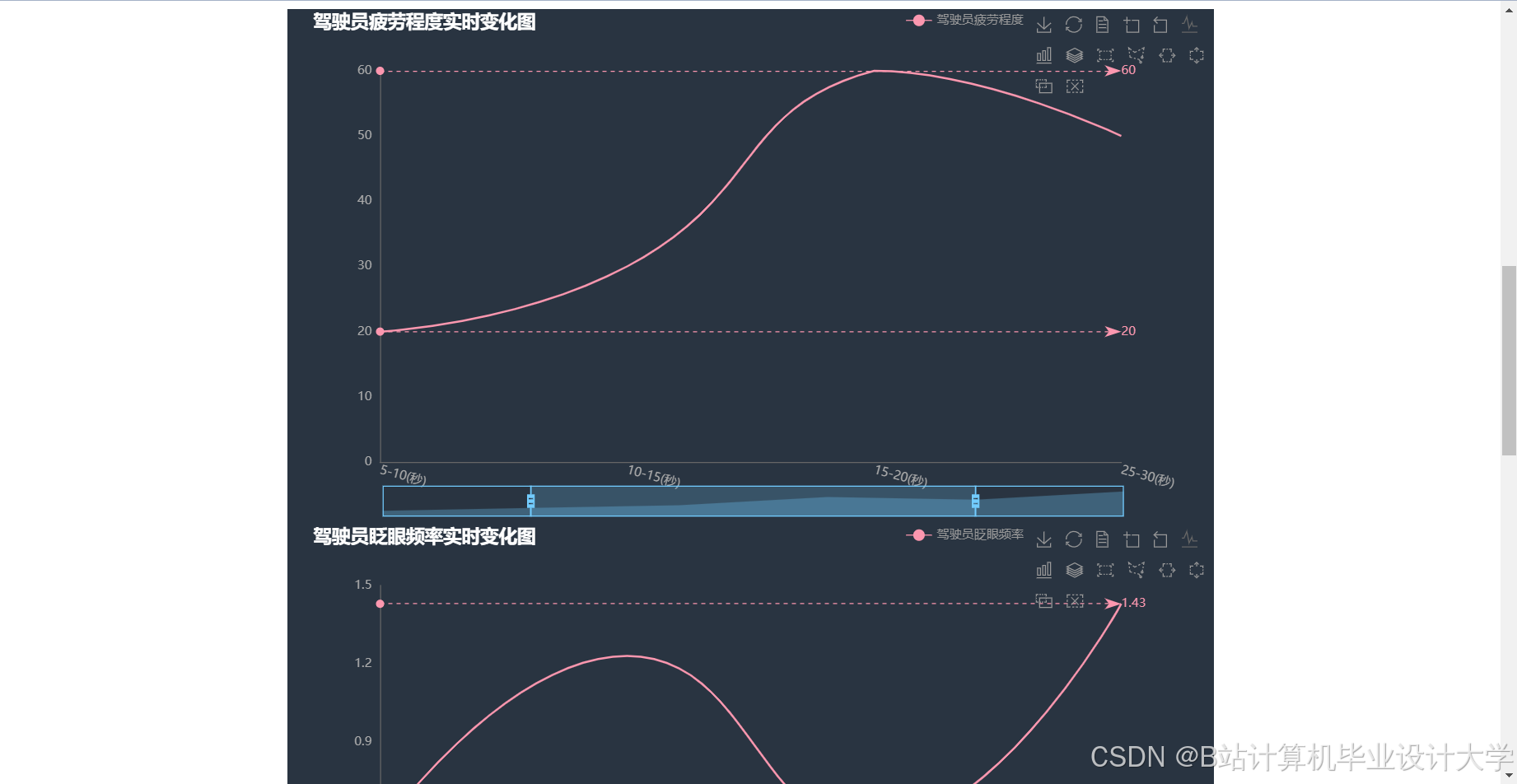
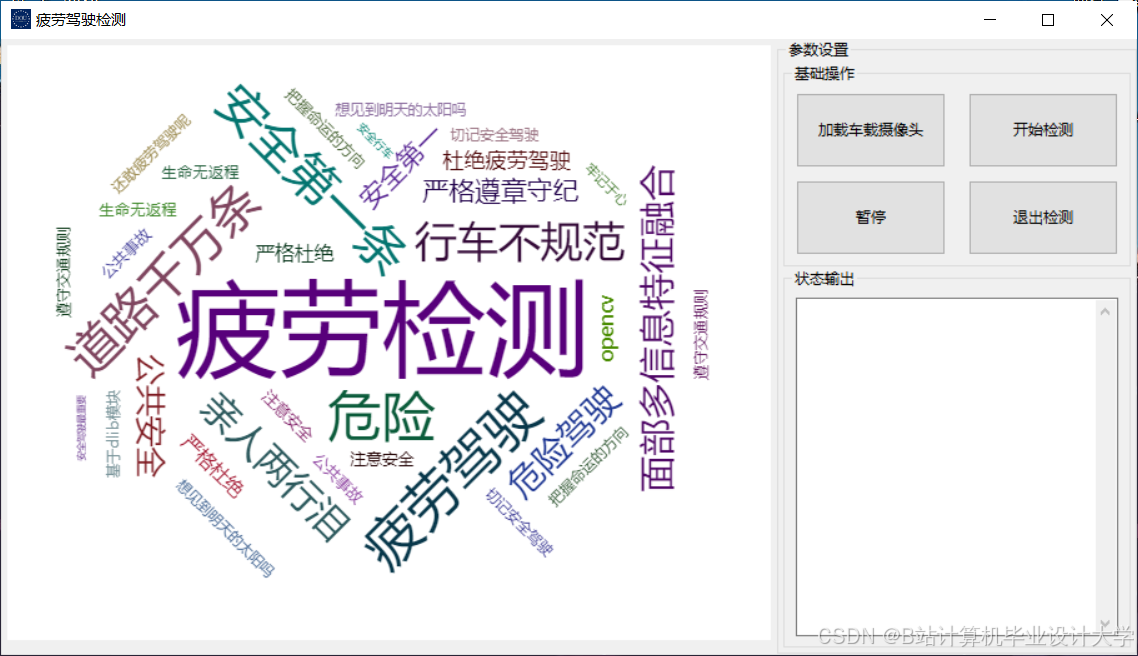
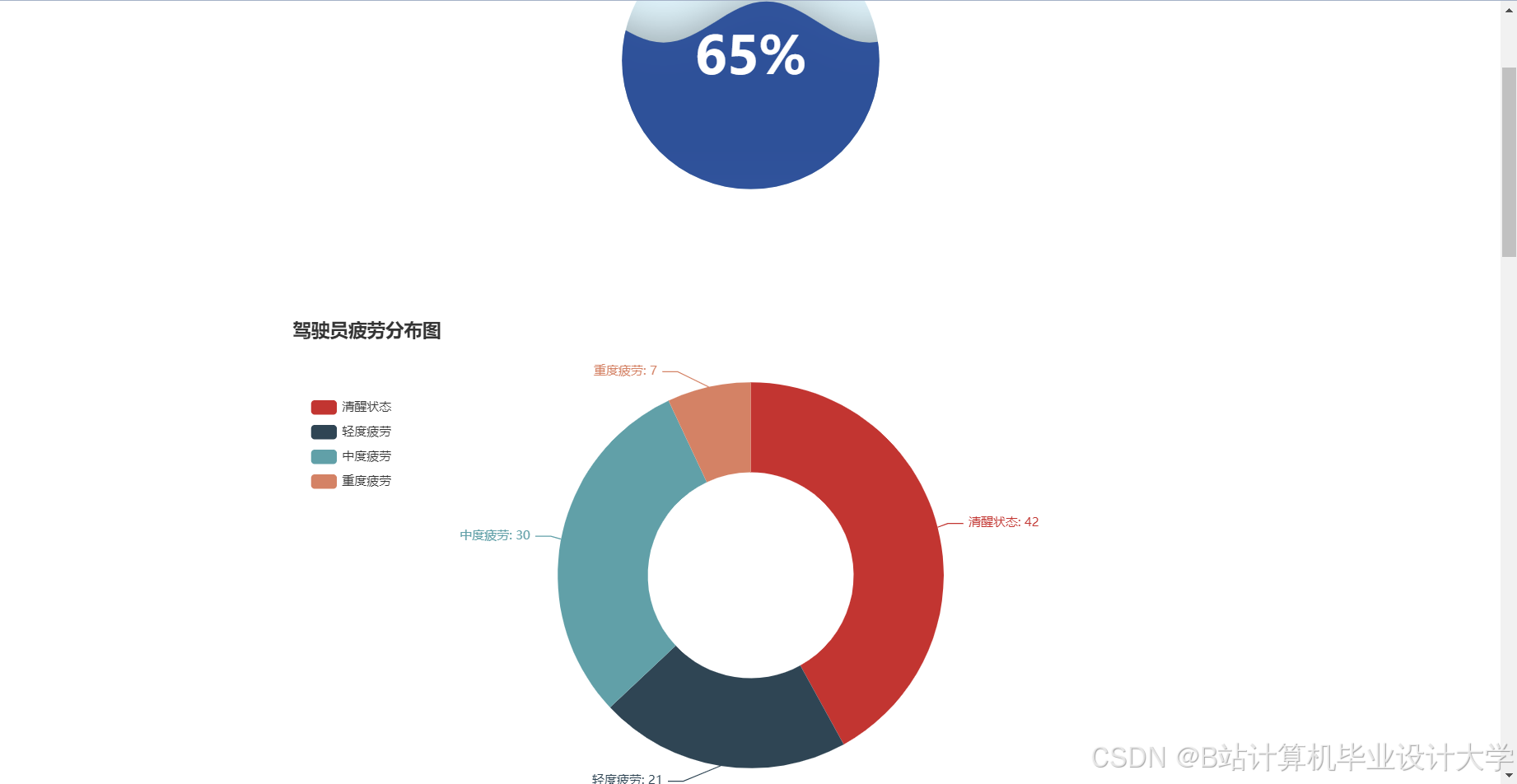
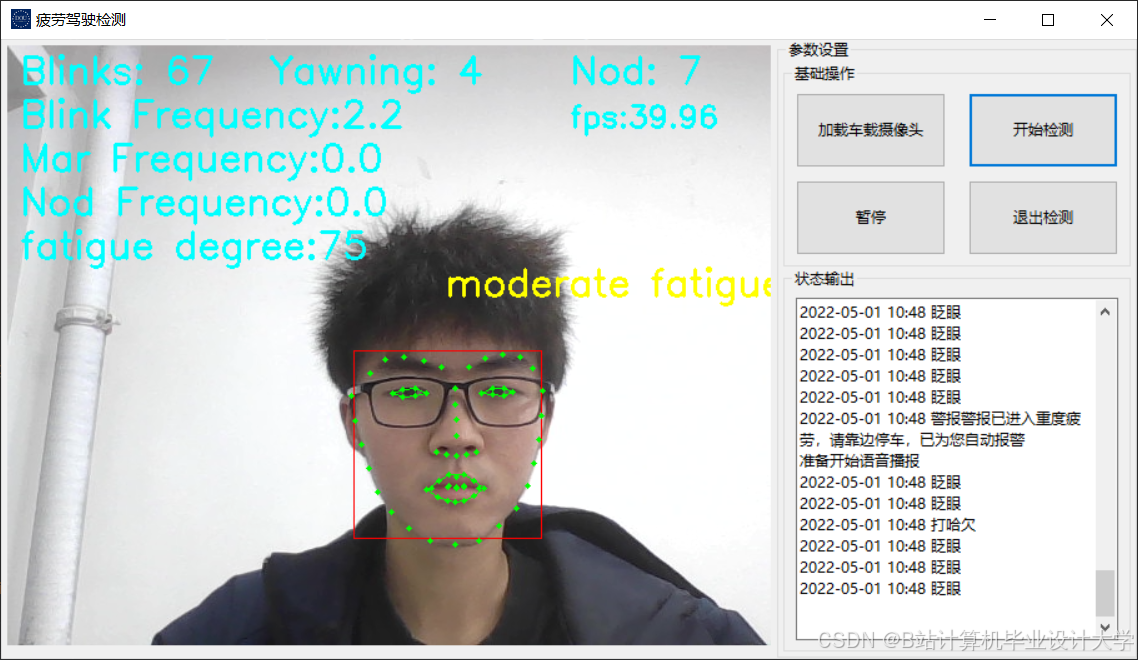
运行截图

推荐项目
上万套Java、Python、大数据、机器学习、深度学习等高级选题(源码+lw+部署文档+讲解等)
项目案例










优势
1-项目均为博主学习开发自研,适合新手入门和学习使用
2-所有源码均一手开发,不是模版!不容易跟班里人重复!

🍅✌感兴趣的可以先收藏起来,点赞关注不迷路,想学习更多项目可以查看主页,大家在毕设选题,项目代码以及论文编写等相关问题都可以给我留言咨询,希望可以帮助同学们顺利毕业!🍅✌
源码获取方式
🍅由于篇幅限制,获取完整文章或源码、代做项目的,拉到文章底部即可看到个人联系方式。🍅
点赞、收藏、关注,不迷路,下方查看👇🏻获取联系方式👇🏻

有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐
 26
26 0
0- 0



 已为社区贡献149条内容
已为社区贡献149条内容

所有评论(0)