关于通过使用autoware.universe官方包nebula驱动获取Robosense的Helios16激光雷达的点云,在RViz2中看到的点云上方多出“一坨”的问题记录
摘要:解决Helios16激光雷达点云镜像问题的最简单方法是修改nebula_decoder.hpp文件,将SensorT::packet_t::n_channels改为16。更彻底的解决方案包括:1)为Helios16创建16通道的packet/traits;2)在robosense_packet.hpp中定义专用packet_t;3)更新相关垂直角数组;4)扩展型号选择支持Helios16;5
先说解决办法:
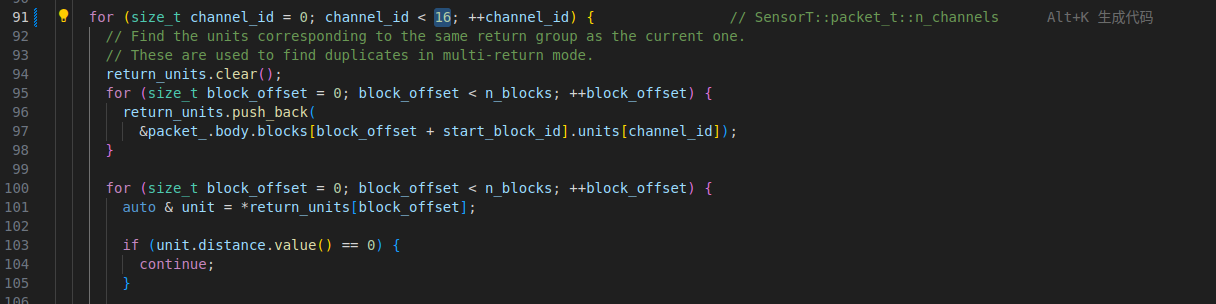
最最直接简单的办法就是将/home/xiaoan/autoware/src/sensor_component/external/nebula中的nebula_decoders/include/nebula_decoders/nebula_decoders_robosense/decoders/robosense_decoder.hpp文件中的SensorT::packet_t::n_channels改为数字16。具体位置如图所示:(图中已改)
另外的方法就比较繁琐需要动官方的驱动代码:
给 Helios16 建一个“16通道”的 packet/traits,并在工厂里选择它,这样以后就不用再去手改 robosense_decoder.hpp 里的 for (channel_id < n_channels) 了;
在robosense_packet.hpp里,给 Helios16 定义专用的 packet_t(关键是 block 的 units[16] 和 static constexpr size_t n_channels = 16;)。
在robosense_common.hpp里,给 Helios16 放一份16个垂直角数组(垂直角一定要是 16 项,不要 32 项)。如果手头暂时没有官方表,可以先把 32 通道表里对应 16 线的那一半挑出来暂用(后续再换成官方表)。如果原来有个 Helios(32线)专用的 kVerticalAngles[32],不要用它;Helios16 的转换时要引用这 16 项。
在 robosense_scan_decoder.hpp里,做型号选择(把现在只认 “Helios / Bpearl” 的地方,扩展支持 “Helios16”)。
让 launch/参数也能填 Helios16
你现在 --show-args 只显示 'Helios' | 'Bpearl',说明 launch 限定了 choices。把 Nebula 的 robosense_launch_all_hw.xml(或 .py)里那段 DeclareLaunchArgument('sensor_model', choices=['Helios','Bpearl']) 改成包含 'Helios16',并在 nebula_ros/config/lidar/robosense/ 目录下复制一份 Helios.param.yaml 为 Helios16.param.yaml。
这样一来,解码循环仍旧是 for (size_t channel_id = 0; channel_id < SensorT::packet_t::n_channels; ++channel_id),但 n_channels 来自你选的 traits(16),不会再“越过 16 去读后面的块”,镜像也自然没了。
再通俗的讲一下是为什么:
-
Helios16 每个数据块只有 16 个通道(激光束)。
-
你当前用的 nebula/robosense 解码器在模板参数里把 Helios 当成 32 通道来处理(
n_channels=32)。 -
解码循环是按
channel_id = 0 .. n_channels-1逐通道取一组返回(Dual 模式就是两组),并用 第channel_id束的竖直角表 去还原 3D 点。 -
当它“以为”有 32 束时,
channel_id = 16..31这半段:-
要么读到了不属于通道数组的内存(但结构体布局下那些数看起来仍像“合法距离/强度”,不会全是 0),
-
要么用到了32 线竖直角表里后 16 束的角度(通常与前 16 束在上下方向大致对称)。
-
-
结果:你看到的第二团点云就像把第一团沿水平面翻折上去的“镜像”。
这也解释了为什么“把n_channels改为 16”后就消失了——解码器不再去处理那不存在的后 16 束,自然不会“凭空造”出一份镜像点云。
简单说:模型/通道数搞错 → 竖直角表也错 → 多解出一半“假通道” → 像镜像。
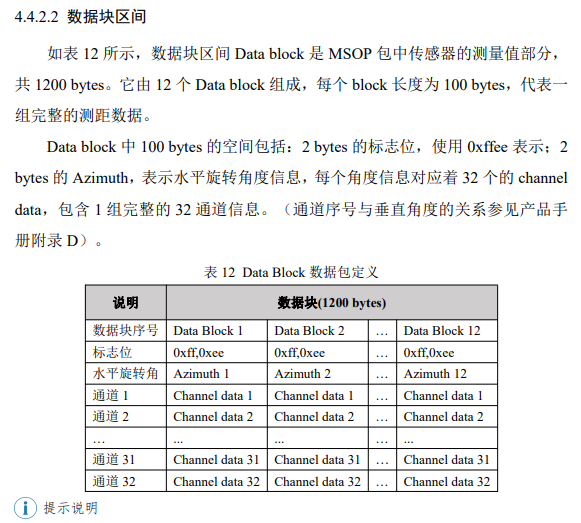
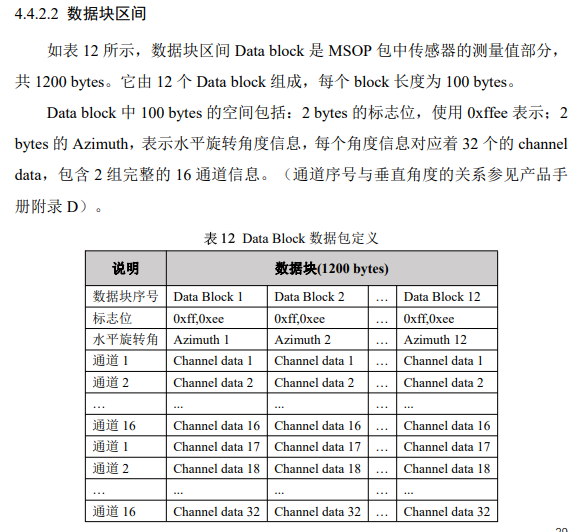
下边是Robosense的Helios32和Helios16官方文档中的Data Block数据包定义:

有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐

 11
11 0
0- 0



 已为社区贡献3条内容
已为社区贡献3条内容

所有评论(0)