基于钡铼技术ARMxy系列BL410,全自动激光打蟑螂方案揭秘
大家都知道蟑螂有“三绝”:跑得快躲得深打不死但蟑螂万万没想到,有一天它会被一台工控机“盯上”。主角就是—— ARMxy系列。今天我们带来一场别开生面的演示:👉ARMxy系列。AI算力:内置NPU,能跑轻量目标检测模型控制能力:Y扩展板带(舵机控制)+(激光开关)负责实时采集画面,传给 BL410 识别两个舵机(水平+垂直)摄像头和激光头固定在同一个支架上,能随时转动接 DO 控制,开/关由 BL
大家都知道蟑螂有“三绝”:
-
跑得快
-
躲得深
-
打不死
但蟑螂万万没想到,有一天它会被一台工控机“盯上”。主角就是—— ARMxy系列BL410 边缘计算控制器。
今天我们带来一场别开生面的演示:👉ARMxy系列BL410 激光灭蟑实验。

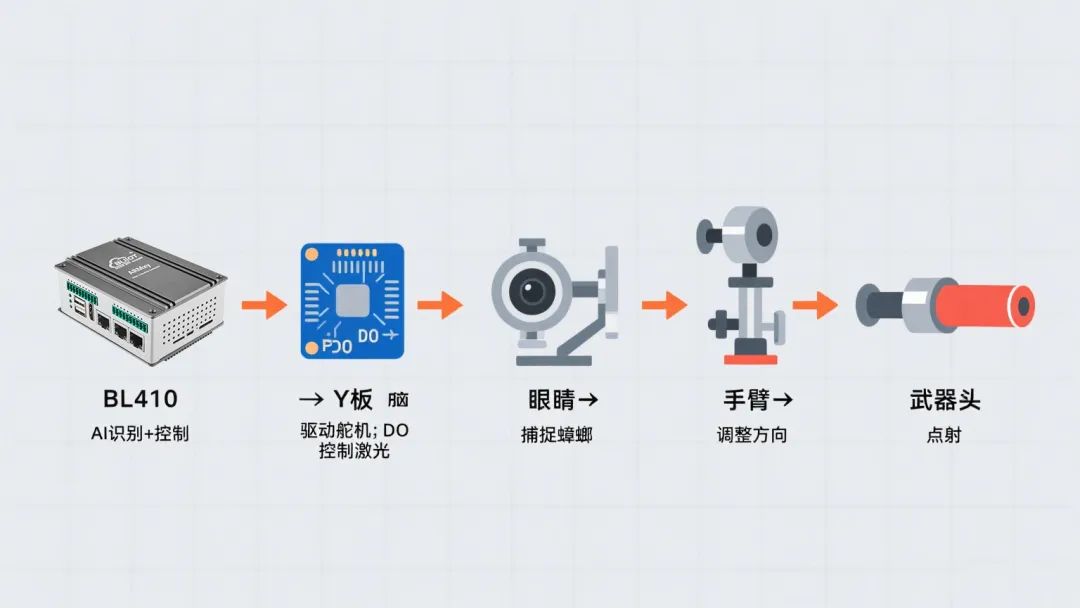
系统组成
整套系统由四个部分组成:
-
ARMxy系列BL410 工控机
-
AI算力:内置NPU,能跑轻量目标检测模型
-
控制能力:Y扩展板带 PWM(舵机控制)+ DO(激光开关)
-
-
摄像头
-
负责实时采集画面,传给 BL410 识别
-
-
舵机云台
-
两个舵机(水平+垂直)
-
摄像头和激光头固定在同一个支架上,能随时转动
-
-
激光头
-
接 DO 控制,开/关由 BL410 下达命令
-
低功率版本,仅作演示用(不会真烧伤)
-
流程详解
整个过程分三步,像极了一场“狙击作战”:
1️⃣ 发现目标
-
摄像头捕捉画面
-
BL410 内置 AI 模型(YOLOv5n / NanoDet)检测蟑螂位置
-
算法输出:目标坐标 (X,Y)
👉 就像“相面师”给蟑螂拍了张“嫌疑人照片”。
2️⃣ 瞄准跟踪
-
BL410 把坐标转换成舵机角度
-
通过 PWM 模块 控制云台转动
-
摄像头+激光头始终保持对准目标
-
如果蟑螂乱跑,云台就不停跟随,直到目标居中
👉 相当于给蟑螂戴了一个“激光准星”。
3️⃣ 激光点射
-
当蟑螂进入画面中心区域(准星位置),
-
BL410 的 DO 模块 拉高电平 → 打开激光电源
-
红光瞬间点亮,完成一次“点射”
👉 低功率激光:效果是“警告+威慑”👉 高功率激光:理论上真能“秒杀”,但危险性太高,不建议实际使用。
软件逻辑
演示系统的“大脑”是 Node-RED:
-
AI识别节点 → 摄像头输入 + YOLO 模型推理
-
逻辑节点 → 计算坐标差值,生成舵机控制指令
-
PWM节点 → 输出给舵机,转动云台
-
DO节点 → 控制激光开关
-
Dashboard界面 → 实时显示画面、目标框、激光状态
👉 所有逻辑都能“拖拽式”完成,不需要复杂编程。
趣味解读
如果请一个“算命先生”给蟑螂看相,他可能会说:
-
“印堂发黑” → 激光照上来了
-
“走路飘忽” → 舵机在追踪中
-
“命中带煞” → Node-RED 已下达击杀命令
这不是玄学,这是科技:AI算法就是“火眼金睛”,PWM模块就是“铁手追踪”,DO模块就是“一击必杀”。
意义在哪?
当然我们不是为了真的灭蟑螂。这个演示展示的是:
-
AI 边缘识别 → BL410 在端侧实时跑模型
-
运动控制 → PWM 驱动外设,完成自动跟踪
-
执行控制 → DO 模块一键开关外部设备
-
场景迁移 → 今天是“蟑螂”,明天就能是“零件缺陷”或“仓储货物”
一句话:👉 这是一个 有趣的实验,👉 也是一个 严肃的能力展示。

结尾
蟑螂的“三绝”,遇到 BL410 的“三板斧”——
-
AI 算力:无处可藏
-
舵机控制:跑不掉
-
激光开关:插翅难飞
原来,ARMxy系列工业计算机除了能守护工厂,还能在实验室里,带来这么好玩又硬核的“黑科技秀”。

有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐
 8
8 0
0- 0



 已为社区贡献2条内容
已为社区贡献2条内容

所有评论(0)