“智驾”的“Log2World”落地方案设计
例如,通过分析实车数据中的事故场景,可以构建符合预期功能安全(SOTIF)标准的场景库,覆盖未知不安全场景(A3)和未知安全场景(A4)。例如,GAIA-1可以根据文本和动作输入生成逼真的驾驶场景视频,与Log2world的实车数据结合,形成"真实+生成"的混合场景库,显著提升仿真测试的全面性和效率。与3DGS的集成主要体现在环境重建环节。动态参与者行为提取是Log2world的另一关键环节,通过
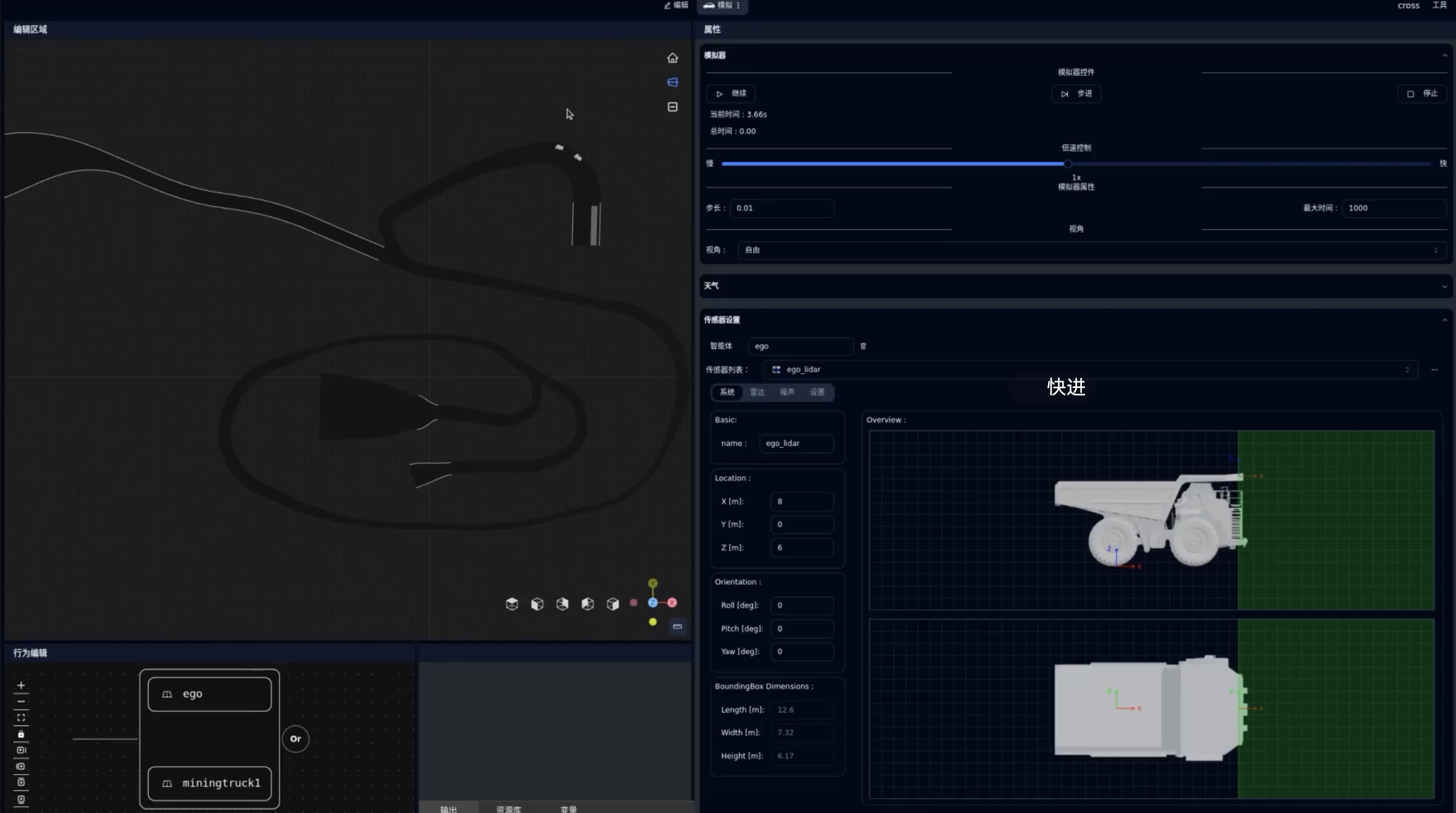
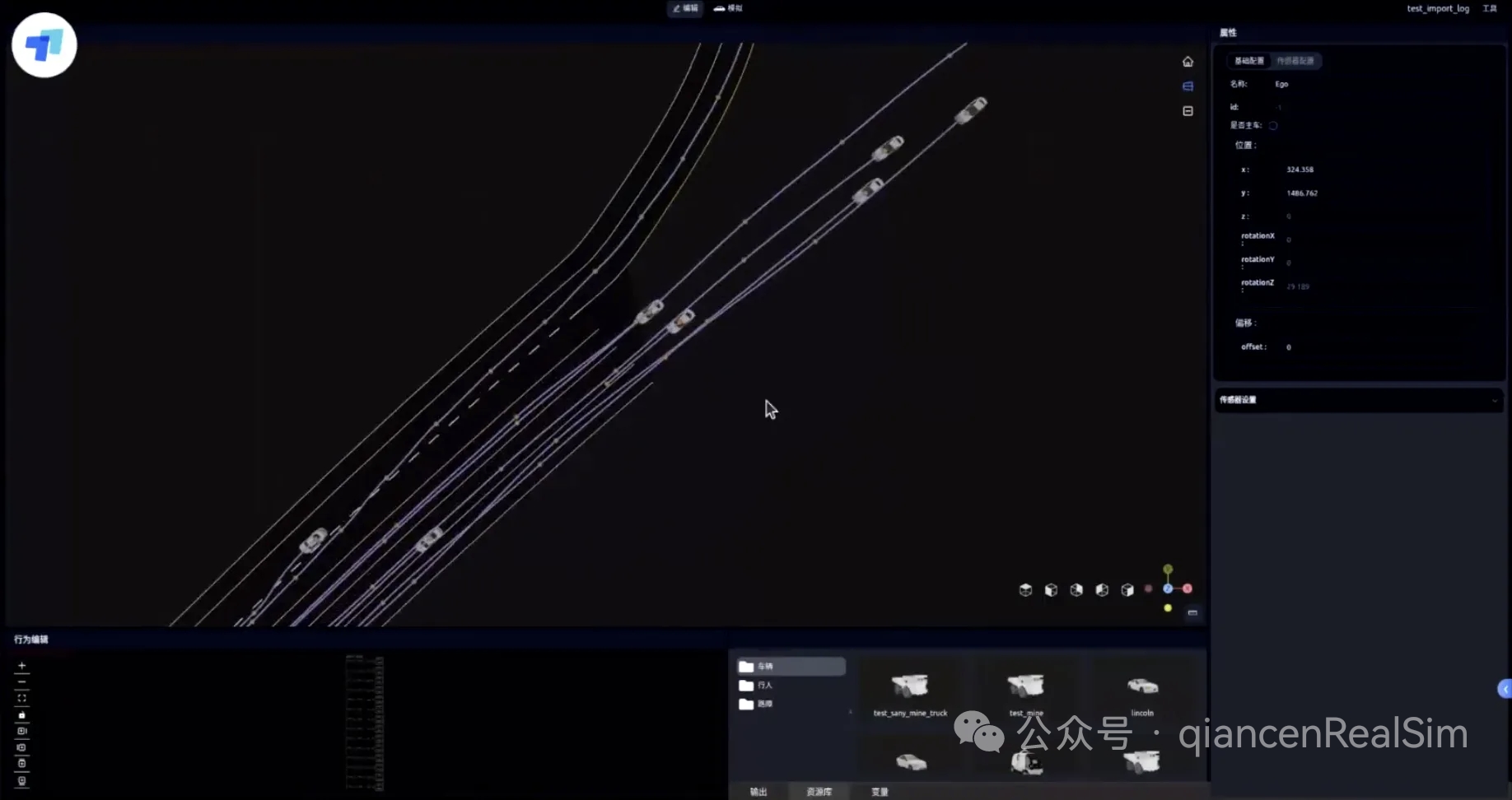
让数据真正闭环的L4级自动驾驶仿真工具链-杭州千岑智能科技有限公司:RSim。
Log2world作为自动驾驶仿真领域的关键技术,代表了从实车数据到虚拟场景的转换能力,是构建高保真、可复现自动驾驶测试环境的核心技术。Log2world通过将实车测试数据(如CAN总线、传感器数据、GPS/IMU数据)自动转化为OpenX标准格式的仿真场景,实现了真实世界与虚拟仿真环境的无缝衔接。这种技术不仅能够解决传统仿真中场景构建复杂、还原度低的问题,还能有效利用海量路测数据,加速自动驾驶系统的验证与迭代。本文将从技术原理、实现流程、集成应用及评估优化四个方面,系统分析Log2world设计方案的关键要素。
一、Log2world技术原理与转换机制
Log2world技术本质上是将实车路测数据(Log)转化为虚拟仿真世界(World)的工具链,其核心在于数据挖掘、特征提取和数字孪生技术的结合。在技术架构上,Log2world主要依赖于实车数据采集系统,通过多传感器同步记录车辆状态与环境信息,然后利用先进的算法进行数据处理与场景重建。Log2world的关键转换机制包括轨迹还原、环境几何重建和动态参与者行为提取三个核心环节,最终输出符合OpenX标准格式的仿真场景文件。
轨迹还原是Log2world的第一步,通过IMU/GNSS数据与SLAM/VIO算法的融合,实现对车辆运动轨迹的高精度还原。在实现过程中,通常采用卡尔曼滤波或RTS(Recursive Time Smoothing)算法进行传感器数据的时间同步和空间对齐,确保轨迹的连续性和准确性。例如,RSim通过路端设备记录路口处的真实交通流,再利用这些数据还原车辆的精确轨迹。
环境几何重建是Log2world的核心技术挑战,通常采用NeRF(Neural Radiance Fields)或3D Gaussian Splatting(3DGS)等隐式或显式3D重建方法,从多视角图像和点云数据中恢复场景的几何结构和纹理信息。NeRF通过深度学习模型隐式表达3D场景,能够从新视角生成逼真图像,而3DGS则通过显式表示实现高质量的实时渲染。例如,DriveEnv-NeRF框架通过多视角图像隐式建模场景几何与纹理,生成高保真3D环境,并支持光照条件编辑,有效解决了自动驾驶中的sim-to-real差距问题 。
动态参与者行为提取是Log2world的另一关键环节,通过分析实车数据中的其他交通参与者(车辆、行人等)的轨迹、速度、加速度等行为特征,构建符合交通规则的动态行为模型。这一过程通常采用LSTM编码器-解码器框架(EDMTP)进行多步轨迹预测,结合随机森林、支持向量机等机器学习模型进行行为模式识别 。例如,RSim能够从历史轨迹数据中提取特征,实现对交通参与者未来行为的预测,误差增长率低于传统方法。
二、Log2world实现流程与算法
Log2world的实现流程可分为数据采集、数据处理、环境重建和行为建模四个阶段,每个阶段都有特定的算法和技术支持。
数据采集阶段是Log2world的基础,需要同步采集多源传感器数据。典型的采集系统包括车辆CAN总线(采集车辆状态数据)、激光雷达(采集环境点云数据)、毫米波雷达(采集速度和距离信息)、摄像头(采集视觉信息)以及GNSS/IMU(采集定位和姿态信息)。数据采集的关键在于多传感器的时间同步和空间对齐,通常采用高精度时钟和统一坐标系进行数据记录。例如,特斯拉的传感器配置方案采用8个摄像头、1个毫米波雷达和12个超声波雷达的组合,通过FSD计算平台实现数据融合与处理。
数据处理阶段主要包括点云处理、轨迹对齐和行为序列分析。点云处理通常采用滤波(如地面点分离)、抽稀(如TIN算法)和分类(如曲率分析)等技术优化数据质量。轨迹对齐则通过IMU/GNSS数据与SLAM/VIO算法的融合,结合卡尔曼滤波或RTS算法实现传感器时空同步。行为序列分析则通过多源参数(如速度、加速度、方向盘转角)结合机器学习模型(如随机森林、SVM)进行驾驶行为识别与分类。数据处理的核心目标是提取高质量的场景要素,为后续的环境重建和行为建模提供基础。
环境重建阶段采用NeRF或3DGS等算法从处理后的数据中恢复场景的几何结构和纹理信息。NeRF通过MLP网络隐式建模场景的辐射场,实现从新视角生成逼真图像;而3DGS则通过显式表示实现高质量的实时渲染。环境重建的关键在于如何高效处理大规模点云和图像数据,生成高保真的3D场景表示。例如,RSim支持从点云和图像生成3D模型(如STL、OBJ),并通过NSDT 3DConvert等工具转换为OpenDRIVE兼容的静态道路模型。
行为建模阶段将动态参与者的行为特征转化为OpenSCENARIO格式的动作描述。这一过程通常采用轨迹预测算法(如LSTM、EDMTP)和行为模式识别技术(如决策树、随机森林)提取交通参与者的行为特征,然后通过逻辑场景参数化方法将其转化为XML格式的动作序列。行为建模的核心在于如何准确捕捉交通参与者的意图和行为模式,确保仿真场景的动态真实性。例如,RSim生成符合交通规则的HDMap,实现对动态行为的精确控制。

输出阶段将重建的环境和提取的行为逻辑整合为OpenDRIVE/OpenSCENARIO XML文件,支持RSim、CARLA、Unreal、aiSim、VTD等仿真平台直接加载。输出的核心在于确保生成的场景文件符合OpenX标准,能够在不同仿真平台间无缝切换。
三、Log2world与其他仿真技术的集成应用
Log2world并非孤立技术,而是与多种仿真技术协同工作的系统。Log2world与3DGS、GAIA-1等生成式AI技术的集成,能够显著提升自动驾驶仿真场景的真实性和多样性。这种集成不仅能够解决实车数据的局限性,还能通过生成式技术扩展长尾场景,为自动驾驶系统提供更全面的测试环境。
与3DGS的集成主要体现在环境重建环节。3DGS作为一种显式3D重建技术,能够处理Log2world重建的点云和图像数据,生成高保真动态场景。3DGS通过将场景分解为前景和后景,支持场景编辑(如替换障碍物),提升仿真场景的灵活性和多样性。例如,3DGS可以将NeRF生成的隐式场景表示转换为显式3D模型,便于在仿真环境中进行物理交互和实时渲染。
与GAIA-1的协同则体现在场景生成环节。GAIA-1作为生成式世界模型,可以通过文本和动作输入生成逼真的驾驶场景视频。Log2world可以将实车数据转化为OpenX格式的场景文件,而GAIA-1则可以基于这些文件生成更复杂的场景变体,如极端天气、罕见交通流等。例如,GAIA-1可以将Log2world的OpenX场景文件作为输入,生成符合特定条件的场景变体,用于自动驾驶系统的安全验证。
与DriveDreamer的互补主要体现在行为建模环节。DriveDreamer的两阶段训练(结构化条件+动作预测)可以与Log2world的轨迹数据结合,生成交互式驾驶场景。DriveDreamer的Auto-DM扩散模型可以处理Log2world的静态环境表示,生成符合交通规则的动态视频序列。例如,DriveDreamer-2通过LLM接口将用户语言描述直接生成代理轨迹和HDMap,与Log2world的实车数据结合,实现"真实+生成"的混合场景库。
这种集成应用的价值在于:Log2world侧重真实场景复现,而生成式模型擅长生成长尾场景,两者结合可以构建更全面的仿真测试环境。例如,RSim通过Log2world将路端设备记录的真实交通流导入仿真引擎,再结合生成式技术扩展边缘案例,形成完整的仿真-训练-验证闭环。
四、Log2world场景重建质量评估标准与优化方向
Log2world场景重建的质量评估是确保仿真环境真实性的关键环节,需要从几何精度、行为真实性、仿真效率和覆盖全面性四个维度进行综合评价。基于这些评估标准,可以制定针对性的优化方向,提升Log2world的整体性能。
几何精度评估主要关注重建场景与真实场景的匹配度。对于静态道路模型,可以采用PSNR/RMSE(点云/图像)、车道线曲率误差(≤0.5%)、车道宽度偏差(±10cm)等指标。例如,车道航向相对精度可设置为0.082%(归算至100m车道线长度为0.082m),极限误差为0.159m,满足相对精度要求。对于交通标志,可以验证标志类型、位置与真实场景的匹配率,确保标志信息的准确性和完整性。
行为真实性评估主要关注动态参与者行为与真实场景的一致性。可以采用轨迹误差(RMSE≤0.3m)、交通规则遵守率(≥99%)、行为模式分布一致性(KL散度<0.1)等指标。例如,通过分析实车数据中的换道行为,可以构建基于决策树和随机森林的换道识别模型,验证仿真场景中换道行为的合理性 。同时,可以评估仿真场景中行人横穿道路等行为是否符合交通规则和实际情况。
仿真效率评估关注Log2world的处理速度和资源消耗。可以采用场景生成时间(<1分钟)、渲染延迟(<50ms)、并发测试支持能力等指标。场景生成时间是评估Log2world效率的关键指标,直接影响仿真测试的迭代速度 。例如,通过优化NeRF网络结构和训练流程,可以将场景重建时间从小时级缩短至分钟级,显著提升仿真效率。
覆盖全面性评估关注Log2world能否覆盖自动驾驶系统所需的各种场景。可以采用法规场景覆盖率(≥95%)、长尾场景占比(≥20%)、场景多样性等指标。法规场景覆盖率是确保自动驾驶系统安全性的基础,必须满足EuroNCAP等标准的场景分类要求 。例如,通过分析实车数据中的事故场景,可以构建符合预期功能安全(SOTIF)标准的场景库,覆盖未知不安全场景(A3)和未知安全场景(A4)。
基于这些评估标准,Log2world的优化方向主要包括:
算法层面优化:采用轻量化NeRF(如DriveEnv-NeRF压缩版)降低重建时间,结合卡尔曼滤波优化轨迹预测精度。例如,DriveEnv-NeRF通过多视角图像隐式建模场景几何与纹理,生成高保真3D环境,并支持光照条件编辑,有效提升了场景重建的真实性和效率。
工程层面优化:开发OpenX格式转换工具链(如3DGS→OpenDRIVE),利用GPU并行加速渲染。例如,TESS NG的OpenDrive路网转化工具包支持将3DGS生成的3D模型转换为OpenDRIVE格式,实现路网的精确描述和仿真。同时,通过优化数据传输链路,可以缩短仿真数据传输时间,提升整体仿真效率。
数据层面优化:增强边缘场景采集策略(如夜间施工),引入多模态传感器融合提升点云与图像对齐质量。例如,通过增加边缘场景的采集比例,可以构建更全面的场景库,覆盖自动驾驶系统可能遇到的各种复杂情况。同时,通过多模态传感器融合技术,可以提高点云与图像的对齐精度,确保环境重建的准确性。
五、Log2world的未来发展趋势
随着自动驾驶技术的不断发展和生成式AI的突破,Log2world的设计方案也在持续演进。未来Log2world将向更高效、更智能、更全面的方向发展,成为自动驾驶数据闭环的关键支撑。
首先,Log2world将与生成式AI技术深度融合,实现从实车数据到虚拟场景的自动化转换。通过结合GAIA-1、DriveDreamer等生成式模型,可以自动生成高质量的仿真场景,覆盖自动驾驶系统可能遇到的各种复杂情况。例如,GAIA-1可以根据文本和动作输入生成逼真的驾驶场景视频,与Log2world的实车数据结合,形成"真实+生成"的混合场景库,显著提升仿真测试的全面性和效率。
其次,Log2world将向多模态、多传感器融合方向发展,提升场景重建的真实性和完整性。通过融合激光雷达、毫米波雷达、摄像头等多种传感器数据,可以构建更全面的环境模型,支持自动驾驶系统的多模态感知测试。例如,通过多源参数的高速工况驾驶行为模式识别方法,可以综合考虑车辆运动状态和视觉特性数据,提高行为建模的准确性和鲁棒性 。
第三,Log2world将与数字孪生技术结合,构建城市级数字孪生仿真环境。通过大规模路测数据的采集和处理,可以构建高精度的城市道路网络模型,支持自动驾驶系统的区域智能交通仿真与决策测试。例如,通过log2world的方式将路口处的真实交通流导入仿真引擎,结合驾驶员模型进行路口场景的调试验证,形成完整的仿真-训练-验证闭环。
最后,Log2world将向标准化、模块化方向发展,形成完整的自动驾驶仿真工具链。通过遵循OpenX标准(OpenDRIVE/OpenSCENARIO),可以确保生成的场景文件在不同仿真平台间无缝切换,提升仿真测试的通用性和兼容性。同时,通过模块化设计,可以灵活配置传感器、车辆动力学、交通流等仿真要素,满足不同测试需求。
Log2world作为自动驾驶仿真领域的关键技术,其设计方案的完善将显著提升自动驾驶系统的验证效率和安全性。通过将实车数据转化为高保真的虚拟场景,Log2world不仅能够解决传统仿真中场景构建复杂、还原度低的问题,还能有效利用海量路测数据,加速自动驾驶系统的迭代和优化。未来,随着生成式AI和数字孪生技术的不断发展,Log2world将在自动驾驶研发中发挥更加重要的作用,推动自动驾驶技术向更高水平发展。

有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐

 12
12 0
0- 0



 已为社区贡献4条内容
已为社区贡献4条内容

所有评论(0)