“高质量”ADAS HIL交付方案设计
摘要: L4级自动驾驶仿真工具链RSim通过硬件在环(HIL)闭环测试确保系统安全,采用分布式时钟和PTP/gPTP协议实现纳秒级同步,结合FPGA/PCIe降低延迟。多传感器仿真提升精度,包括摄像头8MP分辨率同步、毫米波雷达多普勒模拟及激光雷达高精度点云生成。场景库覆盖中国特有交通状况,支持动态更新与自动化测试。未来趋势将融合5G、AI和云HIL架构,推动高精度同步与分布式测试发展,为自动驾驶
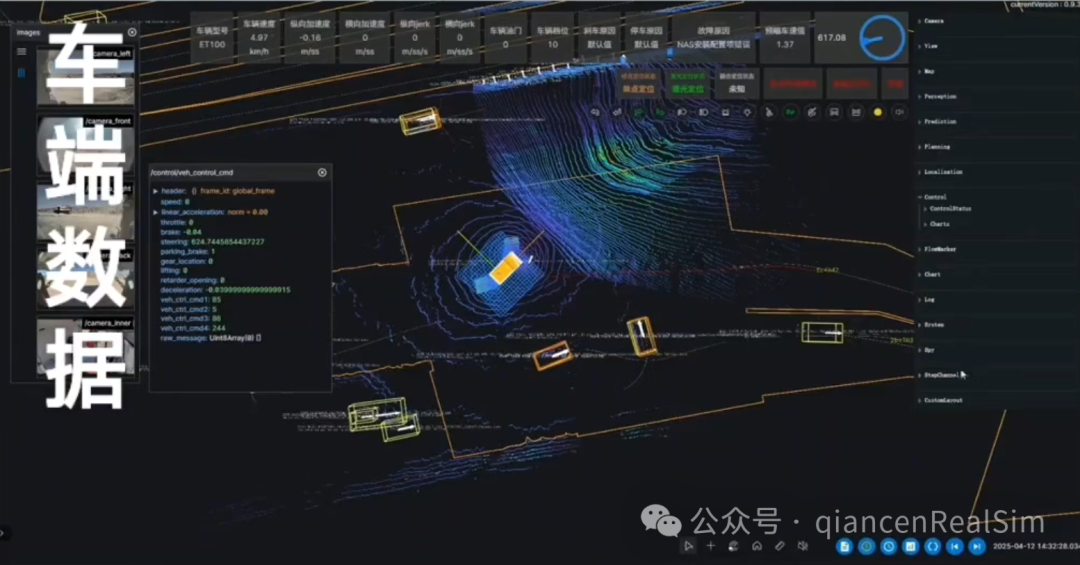
让数据真正闭环的,L4级自动驾驶仿真工具链-杭州千岑智能科技有限公司:RSim。
自动驾驶硬件在环(HIL)测试已成为车企和供应商确保系统安全性和功能完整性的关键环节。随着自动驾驶技术向L4/L5级演进,对HIL系统的实时性、同步性和多传感器仿真精度要求不断提高。高质量的自动驾驶HIL交付方案需采用闭环架构,结合分布式时钟参考和PTP/gPTP协议实现纳秒级同步,通过FPGA/PCIe技术降低延迟,并构建覆盖中国特有场景的场景库。本文将从系统架构设计、组件集成与同步优化、多传感器仿真精度提升以及场景库构建四个方面,全面分析高质量自动驾驶HIL交付方案的技术路径与实施策略。
一、自动驾驶HIL系统架构设计
自动驾驶HIL系统架构主要分为开环和闭环两种类型,各有其适用场景与技术特点。闭环架构已成为自动驾驶HIL测试的主流选择,尤其适用于高阶自动驾驶功能验证。根据实测数据,闭环架构能够提供更真实的测试环境,通过实时反馈形成动态循环,显著提升测试的确定性和真实性 。
开环架构的特点在于其信号生成与车辆轨迹控制分离,车辆轨迹是由用户预设的场景参数强加给系统。这种架构适合基础功能验证,如ACC自适应定速巡航、FCW前碰预警等L2级辅助驾驶功能测试,但其灵活性和真实性相对有限。开环架构的优势在于硬件成本较低,适合桌面级方案或早期开发阶段使用。
相比之下,闭环架构通过实时反馈形成完整测试循环,传感器的输出用于更新控制车辆的执行器,执行器的输出发送车辆控制指令及位置到车辆ECU及GNSS模拟器,ECU及GNSS模拟器进行信号模拟并作用于RSim接收机,形成闭环 。这种架构特别适合验证动态交互功能(如V2X通信、紧急制动)和复杂场景 。例如,RSim的案例中,通过闭环架构实现了摄像头视频数据与车辆动力学模型的实时交互,验证了自动驾驶算法在各种复杂路况下的性能 。
混合架构则是开环与闭环的结合体,通过分层设计平衡成本与性能。RSim HIL解决方案就是一个典型案例,它通过多传感器融合(激光雷达、毫米波雷达、摄像头)构建闭环测试环境,同时保留部分开环架构的灵活性,支持实时路况学习与地图更新 。这种架构特别适合需要同时验证单车智能感知和V2X通信功能的场景 。
从行业趋势来看,闭环架构正逐步成为自动驾驶测试的主流选择。根据最新市场调研,超过80%的L3/L4级自动驾驶项目采用闭环HIL测试方案,以确保系统在各种复杂场景下的可靠性和安全性。RSim等厂商均推出了基于闭环架构的HIL解决方案,支持多传感器数据融合和动态场景模拟。
二、系统组件集成与同步优化策略
高质量自动驾驶HIL系统的核心在于实现GNSS信号与车辆动力学模型的精确同步,以及多传感器数据的时间一致性。同步优化策略主要围绕硬件同步、协议同步和算法补偿三个层面展开,通过分布式时钟参考和PTP/gPTP协议实现亚微秒级同步,确保测试的实时性和准确性。
在硬件同步层面,分布式时钟参考技术是关键。通过PPS(秒脉冲)和10MHz时钟信号同步GNSS模拟器与车辆模型,确保两者时间基准一致 。例如,RSim的集成方案中,采用PPS+10MHz信号作为硬件级同步源,使系统延迟降低至10ms以下 。这种硬件同步方式能够提供数百微秒级别的时钟同步精度,是构建高质量HIL系统的基础。
在协议同步层面,PTP(IEEE 1588)协议成为主流选择。PTP通过在主从设备之间交互同步报文,实现网络设备(如摄像头、雷达)的亚微秒级同步 。这种协议支持硬件时间戳,同步精度可达亚微秒级,适用于多传感器融合场景。例如,昆易电子的工作站采用gPTP授时时间戳,精度小于1ms,通过PCIe接口实现多路采集数据和虚拟场景数据的同步回注 。苏州远测也提出了一种基于PTP的高精度时间同步方案,支持在100Hz采样率下实现误差<6ms的同步精度。
在算法补偿层面,外推法和动态补偿技术是降低延迟的关键。RSim通过Tjoin参数预测未来位置,补偿引擎延迟和网络延迟 。根据测试数据,这种方法能够将系统延迟减少到10ms以内,满足大多数自动驾驶HIL测试需求。
|
同步技术 |
精度 |
实现方式 |
适用场景 |
|
分布式时钟参考 |
百微秒级 |
PPS+10MHz信号 |
GNSS与车辆模型硬件级同步 |
|
PTP/gPTP协议 |
亚微秒级 |
硬件时间戳+网络同步 |
多传感器数据网络同步 |
|
外推算法 |
10ms级 |
Tjoin参数未来位置预测 |
动态场景延迟补偿 |
针对不同厂商的HIL系统,同步优化策略也有所差异。
三、多传感器仿真精度提升方法
自动驾驶HIL系统的测试质量直接受多传感器仿真精度的影响,尤其是摄像头、雷达和激光雷达等关键感知设备。提升多传感器仿真精度的方法主要围绕物理级建模、硬件加速和算法优化三个方面展开,通过结合深度学习和物理模型,生成高真实感的传感器数据。
在摄像头仿真方面,RSim通过FPGA+PCIe直连实现视频数据无损注入,支持8MP分辨率和多通道同步,结合可编程FPGA、强大的数据采集以及运算处理能力,实现多路采集数据和虚拟场景数据的同步回注。
在雷达仿真方面,毫米波雷达需模拟多目标反射和多普勒效应。RSim模型可生成雷达回波信号,支持动态目标速度模拟 。BART算法则通过频域卷积和时域波形生成,模拟雷达回波信号并提取多普勒信息,支持多目标动态场景模拟。根据测试数据,24GHz雷达的噪声水平较高(0.04mm),距离误差达3.45±1.88cm;而60/120GHz雷达的噪声更低(0.01mm),误差<1cm,更适合高精度需求。
在激光雷达仿真方面,RadCloud框架通过深度学习将低分辨率雷达数据实时转换为高分辨率点云,适用于资源受限的自动驾驶平台。体素块算法则通过降采样和法向量估计优化点云数据,减少计算负载,适合HIL中实时处理需求。SiLVR系统通过激光雷达提供深度约束优化NeRF的3D重建,生成高精度点云数据(误差<1cm),并支持动态场景(如车辆运动轨迹)的同步模拟 。NeRF-LiDAR模型通过多视角图像隐式重建3D场景,生成高真实感点云数据,重建精度达到0.98,重建时间仅为4.5小时。
提升多传感器仿真精度的关键在于构建符合行业标准的测试套件。根据ISO 21448(SOTIF)要求,自动驾驶系统必须覆盖传感器物理噪声和环境干扰等边缘场景。高质量的HIL交付方案应支持ISO 21448标准下的场景验证,包括光照变化、镜头畸变、雷达多普勒效应和激光雷达点云噪声等物理特性模拟 。RSim通过精确的车辆动力学仿真,为雷达和激光雷达提供真实的运动状态,提升仿真精度 。
四、测试场景库构建与管理
构建覆盖各类复杂场景的测试场景库是高质量自动驾驶HIL交付方案的重要组成部分。场景库需覆盖从L1到L5各级别自动驾驶功能验证需求,包括典型场景、危险工况场景、标准法规场景和参数重组场景,同时支持中国特有交通场景的模拟。
场景库的构建流程主要包括数据采集、场景理解、场景生成和场景验证四个阶段。数据层整合自然驾驶、事故、法规及虚拟数据,通过特征提取和聚类分析生成标准化场景。场景层则支持参数重组(如天气、光照变化)和边缘案例生成(如传感器故障组合),满足ISO 21448的SOTIF要求 。应用层则调用场景库的场景进行MIL/SIL/HIL/VIL等测试 。
在场景分类方面,根据中国汽研的V3.0场景库标准,自动驾驶测试场景可分为以下几类:
|
场景类型 |
覆盖范围 |
典型场景 |
仿真难度 |
|
自然驾驶场景 |
1228种 |
城市道路、高速公路、乡村道路 |
中等 |
|
危险工况场景 |
206种 |
紧急制动、行人突然横穿、动物闯入 |
高 |
|
标准法规场景 |
82种 |
交通信号识别、道路标线识别、特殊车辆避让 |
中等 |
|
参数重组场景 |
10万+例 |
暴雨、大雾、夜间、V2X通信故障 |
高 |
RSim的HIL系统可模拟中国特有场景,如非机动车混行、行人突然横穿等 。通过实车数据回放和对抗性场景生成,覆盖L4/L5级需求,而且支持OpenSCENARIO格式的场景导入,能够与中汽研的i-Scenario场景库兼容 。
场景库的动态更新机制是确保测试质量的关键。高质量的HIL交付方案应支持场景库的持续迭代,通过实车路测数据反馈和自动化工具扩展场景库 。例如,中国汽研V3.0场景库已包含L4/L5级需求(如城市复杂路况),并通过多会话、定位导向和轻量化LiDAR映射技术不断优化 。
五、高质量HIL交付方案实施策略
基于上述分析,高质量自动驾驶HIL交付方案的实施策略应围绕以下四个方面展开:
首先,系统架构设计应采用闭环架构,结合分布式时钟参考和PTP/gPTP协议实现纳秒级同步。对于L4/L5级自动驾驶测试,闭环架构能够提供更真实的测试环境,通过实时反馈形成动态循环,显著提升测试的确定性和真实性 。在硬件选择上,应考虑支持PPS+10MHz信号同步的GNSS模拟器和车辆动力学模型(如dSPACE ASM)的组合 。对于多传感器融合场景,应选择支持PTP/gPTP协议的交换机和网络设备,确保亚微秒级同步精度 。
其次,多传感器仿真精度提升需结合物理级建模、硬件加速和算法优化。对于摄像头仿真,应选择支持FPGA+PCIe直连的硬件方案,通过自研ISP技术实现动态光照调整 。对于雷达仿真,应选择支持多普勒效应模拟的算法(如BART)和硬件,确保60/120GHz雷达的噪声水平<0.01mm,距离误差<1cm 。对于激光雷达仿真,通过深度学习生成高精度点云数据(误差<1cm),并结合体素块算法优化点云数据,减少计算负载。

第三,测试场景库应覆盖中国特有交通场景,并支持动态更新 。应选择支持OpenSCENARIO格式的场景库(如中国汽研的i-Scenario),并结合实车数据回放和对抗性场景生成技术,覆盖L4/L5级需求 。场景库应包含自然驾驶场景(1228种)、危险工况场景(206种)、标准法规场景(82种)和参数重组场景(10万+例),并按功能模块分级(基础、初级、中级、高级) 。对于中国特有场景(如非机动车混行、行人突然横穿),应选择支持实车数据回放的HIL系统,通过PCIe接口实现多传感器数据同步注入 。

最后,HIL交付方案应支持自动化测试和持续集成。应选择支持实验管理软件、自动化测试软件和测试管理软件的HIL平台,能够实现测试序列开发、激励生成加载、模型参数调试、故障模拟实现及测试分析与评估等功能 。对于L3/L4级自动驾驶测试,应支持V2X功能验证和网络安全测试(如模糊测试、渗透测试),为自动驾驶算法验证提供坚实的环境支撑。

六、行业趋势与未来展望
自动驾驶HIL测试技术正经历快速迭代,未来将呈现以下几大趋势:
5G通信与边缘计算将为HIL测试带来革命性变化。随着5G技术的普及,其低时延、高带宽的特性将使位于不同国家、地区的研发团队能够实时共享HIL测试数据,仿佛所有人员都身处同一实验室 。测试人员在国内对VCU进行某项功能测试时,远在海外的专家可以通过5G网络实时查看数据、监控测试进程,一旦发现问题,立即远程指导调整,极大地提升了协同测试的效率与精准度。
AI技术将深度融入HIL测试系统。AI可以对海量的HIL测试数据进行深度挖掘与学习,自动总结传感器在不同工况下的性能表现规律。借助AI算法,系统能够迅速定位传感器可能存在的故障点,甚至提前预测故障风险 。例如,通过对过往数百次的传感器测试数据学习,AI发现当某一信号参数连续三次出现微小波动时,后续大概率会引发传感器失效问题,从而及时提醒工程师进行优化,大幅缩短了问题排查与解决的时间 。
高精度同步技术将不断演进。随着PCIe 5.0/6.0技术的普及,其高带宽和低延迟特性将为未来多传感器同步提供硬件基础 。PCIe 6.0采用PAM4调制技术替代传统NRZ编码,通过四电平信号传输实现相同符号率下的带宽翻倍,单通道数据速率提升至64GT/s,对应单通道带宽达8GB/s,通过x16配置可提供256GB/s的总吞吐量,足以支撑数据中心800GE网络的高速传输需求 。这种技术升级将使HIL系统的同步精度进一步提升,满足更高级别自动驾驶测试需求。
云HIL和分布式HIL架构将逐渐兴起。传统的HIL测试系统多为单机或局域网部署,随着自动驾驶系统的复杂度增加,单一HIL系统难以满足大规模测试需求。未来将出现云HIL和分布式HIL架构,通过云端高性能计算与本地实时仿真相结合,实现大规模测试用例的并行执行和远程协同开发 。这种架构将大大提升测试效率,降低硬件投入成本,同时支持多地域团队的协同工作。
七、结论与建议
高质量自动驾驶HIL交付方案是确保自动驾驶系统安全性和功能完整性的关键环节。基于闭环架构、分布式时钟参考、PTP/gPTP协议和多传感器仿真技术的HIL系统,能够为自动驾驶算法验证提供接近真实世界的测试环境。
在实施高质量HIL交付方案时,建议采取以下策略:
1. 根据测试需求选择合适的HIL架构。对于基础功能验证(L2级),可选择开环架构以降低硬件成本;对于复杂场景验证(L3/L4级),应选择闭环架构以提高测试真实性 。
2. 构建多层次的同步机制。硬件层面采用PPS+10MHz信号同步GNSS模拟器与车辆模型;协议层面采用PTP/gPTP实现网络设备的亚微秒级同步;算法层面采用外推法和动态补偿技术降低延迟 。
3. 提升多传感器仿真精度。摄像头仿真应支持FPGA+PCIe直连和动态光照调整;雷达仿真应支持多普勒效应模拟和不同频段(24GHz、60GHz、120GHz)的特性仿真;激光雷达仿真应支持NeRF-LiDAR模型和体素块算法优化 。
4. 构建覆盖中国特有场景的场景库。应整合自然驾驶、事故、法规及虚拟数据,通过特征提取和聚类分析生成标准化场景;支持参数重组和边缘案例生成,满足ISO 21448的SOTIF要求;按功能模块分级,覆盖从L1到L5各级别自动驾驶功能验证需求 。
5. 支持自动化测试和持续集成。应选择支持实验管理软件、自动化测试软件和测试管理软件的HIL平台,能够实现测试序列开发、激励生成加载、模型参数调试、故障模拟实现及测试分析与评估等功能 。
随着自动驾驶技术的不断发展,HIL测试系统也将持续演进。未来的高质量HIL交付方案将融合5G通信、边缘计算和AI技术,实现更高精度、更低延迟和更广泛场景覆盖的测试环境。同时,随着中国汽研V3.0场景库等本地化场景库的成熟,HIL测试将更加贴近中国实际交通环境,为自动驾驶系统的安全性和可靠性提供有力保障。

有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐



 26
26 0
0- 0



 已为社区贡献6条内容
已为社区贡献6条内容

所有评论(0)