Dora OS:面向AI时代的新型机器人操作系统
随着全球机器人产业加速发展,市场正进入稳步扩张阶段。根据Data Bridge、Precedence Research等多家国际研究机构数据,,预计到2030至2034年将增长至12至24亿美元,。从区域分布看,,主要受益于中国、日本、韩国等国制造业自动化水平提高以及开源社区活跃。中国市场方面,据最新预测,,预计到2033年将增长至1.11亿美元,,在全球市场中增速名列前茅。全球机器人操作系统市场
随着全球机器人产业加速发展,机器人操作系统(Robot Operating System) 市场正进入稳步扩张阶段。根据Data Bridge、Precedence Research等多家国际研究机构数据,2024年全球机器人操作系统市场规模已达6.1至7.1亿美元之间,预计到2030至2034年将增长至12至24亿美元,年复合增长率(CAGR)维持在9%至14%之间。从区域分布看,亚太地区以38%的收入份额位列全球第一,主要受益于中国、日本、韩国等国制造业自动化水平提高以及开源社区活跃。中国市场方面,据最新预测,2024年国内机器人操作系统市场规模约为4020万美元,预计到2033年将增长至1.11亿美元,年复合增长率达11.8%,在全球市场中增速名列前茅。
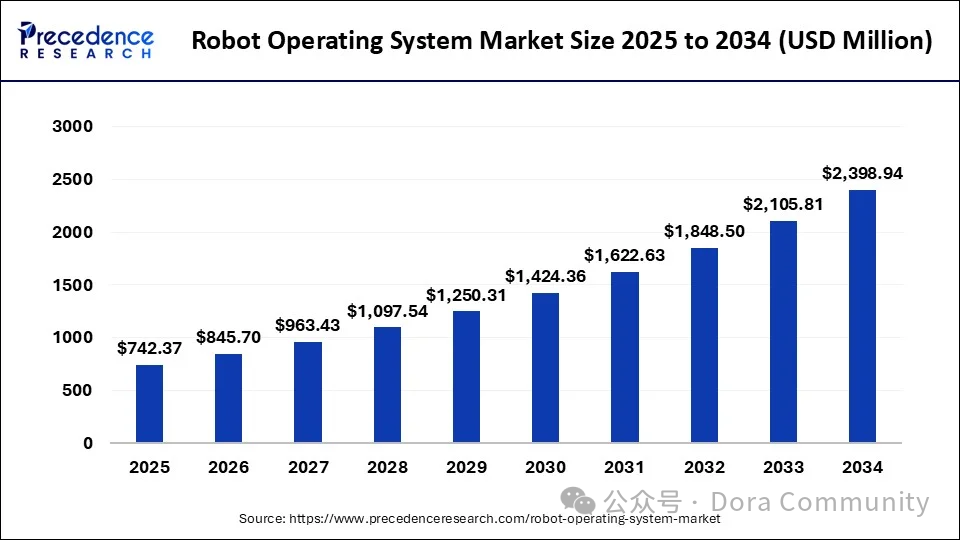
全球机器人操作系统市场规模预测
主流机器人操作系统
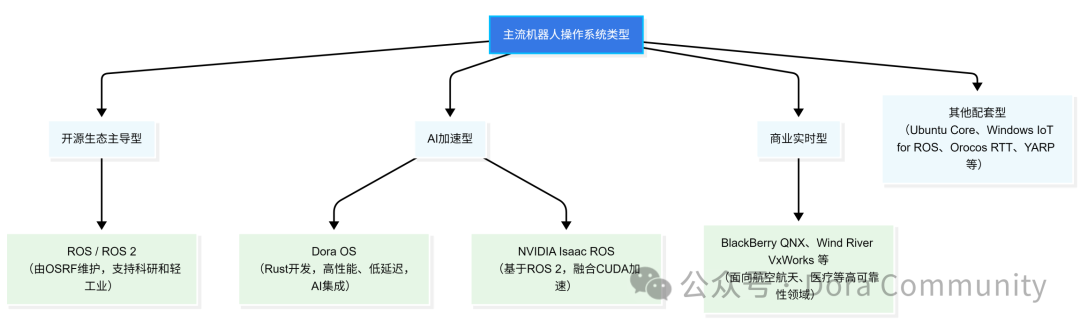
当前主流机器人操作系统可分为三大类型:开源生态主导型、AI加速型和商业实时型,分别由全球开源社区、科技企业与工业控制厂商主导,广泛服务于科研、工业、特种等多种机器人应用场景。
开源生态主导型
第一类是以ROS(Robot Operating System)为代表的开源生态主导型操作系统,由美国非营利机构Open Source Robotics Foundation(OSRF) 维护,长期为全球学术界和轻工业领域提供核心支持。ROS自2007年推出以来广泛应用,但在实时性、安全性、多平台兼容等方面存在架构局限。为此,OSRF于2017年正式发布ROS 2,采用基于DDS(Data Distribution Service) 的通信机制,增强对嵌入式、分布式系统和工业机器人需求的支持。ROS 2现已成为全球开源机器人系统的事实标准,被微软、亚马逊、英伟达等企业广泛集成。尽管ROS将在2025年正式停止维护,但其存量系统庞大,短期内仍具市场影响力。

ROS
AI加速型
第二类是新兴的AI加速型操作系统,代表平台包括Dora OS与NVIDIA Isaac ROS。
其中,Dora OS由Futurewei、中国科学技术大学智能仿真与数据合成工程技术中心、安徽深信科创信息技术有限公司联合开发,采用Rust语言实现底层数据流架构,支持零拷贝通信、跨语言组件集成及热更新,具备高性能与低延迟优势。其设计理念紧密对接人工智能模型集成需求,被广泛认为是“面向AI时代的新型机器人操作系统”,具备较强的自主可控属性与战略替代潜力。
Dora OS
NVIDIA Isaac ROS由英伟达开发,基于ROS 2构建,深度融合CUDA加速、SLAM、深度学习模型及仿真引擎Isaac Sim,已在多款工业自动移动机器人(AMR)与物流机器人中实现部署,是AI工业机器人领域的重要基础平台。
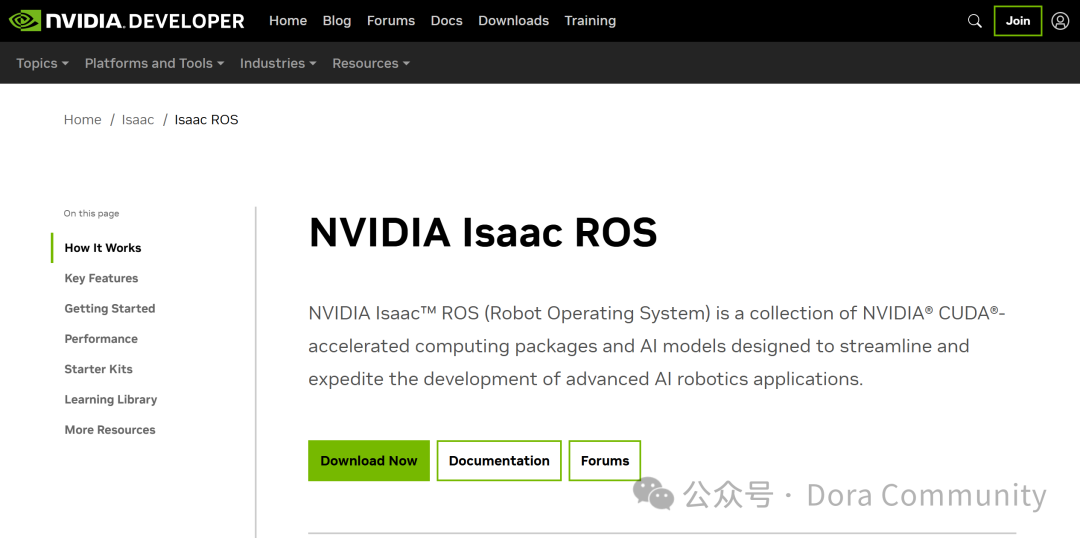
NVIDIA Isaac ROS
商业实时型
第三类为商业实时操作系统(RTOS),如BlackBerry QNX、Wind River VxWorks等,主要面向航空航天、医疗机器人、军工特种机器人与高端协作机械臂领域。这类系统以微内核架构、确定性调度机制和国际安全功能认证为核心优势,具备高可靠性、高安全等级与长生命周期管理能力,已被ABB、KUKA、Yaskawa等工业机器人厂商广泛采用。
BlackBerry QNX
其他配套型
此外,其他配套型操作系统和中间件也具有一定市场地位。例如,Ubuntu Core被Canonical公司打造为ROS官方推荐嵌入式发行版,支持安全沙箱与远程OTA管理,适合大规模部署服务机器人;Windows IoT for ROS由微软推出,结合Visual Studio与Azure生态,主要用于教育与中小企业市场;Orocos RTT与YARP等实时中间件则被部分欧洲研究机构用于高精度运动控制任务。
尽管ROS、Dora OS、Isaac ROS等系统在技术结构上并非传统意义上的操作系统——它们运行于Linux、QNX、VxWorks等底层平台之上,并不直接负责CPU调度、内存管理或设备驱动——但业内普遍将其称为“机器人操作系统”,这一称谓并非误用,而是高度契合其在机器人系统中的关键定位。它们作为中间件或运行时平台,专注于机器人感知、规划、控制等功能模块之间的通信调度、状态同步与任务编排,实质上构成了整个系统的“行为协调核心”和“逻辑组织大脑”。它们决定着模块协作方式、信息流转路径与资源调配效率,构建起机器人的功能架构体系。在这个意义上,它们所承担的职责、系统作用和技术边界,已超出传统中间件的范畴,确实发挥着类似于“操作系统”在通用计算平台上的系统主导作用,因此被称为“机器人操作系统”是合理且具有深层意义的。
从功能诉求来看,机器人系统之所以不能仅依赖传统通用操作系统,正是因为这些系统仅关注底层资源调度,却无法理解和管理机器人独有的语义链路与任务逻辑,例如多传感器之间的实时同步、感知-规划-控制之间的数据解耦与通信、多算法组件的调度封装、跨节点任务的生命周期管理,以及激光雷达、机械臂等硬件的抽象接口适配等复杂协同问题。这些任务属于高度结构化、语义化的系统行为,必须通过中间件建模与调度。与此同时,虽然Android在服务型机器人中被广泛用于人机交互(HMI)层面,但由于缺乏实时性与工业级安全认证,其功能无法延伸至底层控制。因此,实际工程中常采用“Android +控制中间件/RTOS”的分层架构,由Android负责交互界面,由ROS、Dora OS等承担控制主干,两者协同配合、互为支撑,最终实现了机器人系统中“类操作系统”的完整功能闭环。
Dora OS 机器人操作系统
在机器人软件架构领域,Futurewei、中国科学技术大学智能仿真与数据合成工程技术中心、安徽深信科创信息技术有限公司共同推出了新一代数据流计算中间件——Dora OS。该系统本质上是一个专为机器人与智能驾驶应用设计的高性能操作系统,采用Rust语言开发,面向现有ROS/ROS 2系统存在的延迟高、耦合重、不易扩展等痛点,提供了一种自主可控的技术替代方案。Dora OS项目自开源已迅速引发国际AI开源社区的广泛关注,知名人工智能开源社区Hugging Face的联合创始人兼首席科学家Thomas Wolf对Dora OS表示高度认可,并在社交平台上称其为“一个对ROS(机器人操作系统) 极具竞争力的替代方案(A super impressive replacement of ROS)”。
https://x.com/Thom_Wolf/status/
1780241959036047604
Dora OS自2022年发布以来,作为一款基于Rust的数据流中间件,凭借其高性能、低延迟、模块化设计和良好的跨语言支持,在开源社区中快速发展,逐步从原型框架演进为可广泛部署的通用计算基础平台。
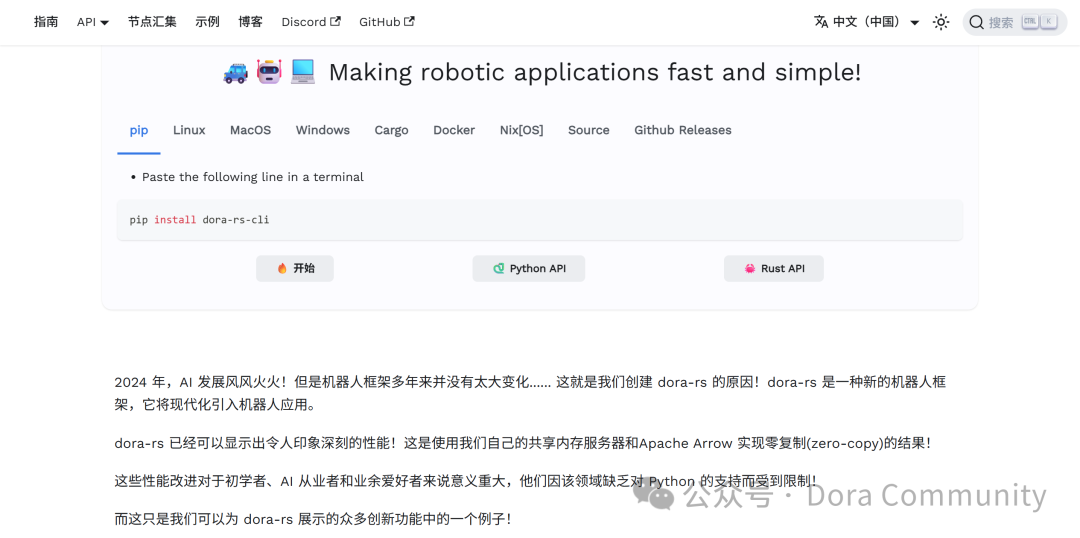
截至2025年8月2日,Dora OS主仓库(github.com/dora-rs/dora)已累计获得约2400颗Star、201次 Fork,历史提交数接近3867次,仍保持每月高频更新节奏。官方已发布完善的Python、Rust、C/C++ API接口以及Docker镜像,支持多语言、多平台的部署需求。

目前,Dora OS项目的核心开发与路线规划由联合团队主导推进,全球开源社区则通过GitHub、Discord等平台形成稳定的协作机制,已有近百名活跃贡献者长期参与生态建设。在实际应用方面,Dora OS已在多个前沿项目中完成示范验证。官方示例仓dora-autoware-localization-demo成功将Autoware定位模块重构至Dora C++ 接口,验证了其与主流自动驾驶系统的高度兼容性;而dora-drives项目则提供从零构建自动驾驶教学车辆的完整教程,已广泛应用于多所高校的嵌入式教学实践中。在FOSDEM 2024技术演示中,项目核心人员Xavier Tao展示了名为Rerun的可视化工具,该工具与Whisper、VLM(视觉语言模型) 以及 Parler 模型集成,能够通过语音指令识别环境并驱动系统完成移动任务,展现了Dora OS 在多模态语义理解与实时控制方面的出色能力。
Dora-rs: 简化下一代机器人的机器人技术栈
FOSDEM 2024
Dora-rs: 简化下一代机器人的机器人技术栈
面向未来,Dora OS将重点推进集群化与工业级功能建设,全面提升平台的系统调度与高可用性支持能力。系统将支持多机节点的自动部署与运行时弹性资源管理,实现跨设备间的数据流协同与负载均衡;具备运行过程中动态调整适应能力,可实现AI模型的热插拔与算子在线升级;在可视化与调试方面,将引入数据记录与回放机制,并结合分布式追踪技术,构建面向执行过程的全流程分析工具;此外,平台还将支撑多机器人系统协同所需的统一管理与高可靠运行,最终构建一个可扩展、低延迟、稳定性强的通用机器人运行平台。

当前ROS生态虽然广泛使用,但存在安全性不足、实时性能有限、架构分散以及生态受制于人的不确定性等问题。ROS生态的核心维护者和决策机构主要在海外。2022年末,开发ROS的Open Robotics公司将其商业部门整体并入了Alphabet(谷歌母公司) 旗下的 Intrinsic公司。尽管ROS官方声明此次收购不会影响ROS开源项目的独立运作,ROS核心库的治理仍留在非营利组织OSRF旗下;谷歌方面也承诺让被收购团队“优先致力于ROS社区的发展”。但是,IEEE Spectrum评论指出一个不容忽视的事实:无论承诺如何,Open Robotics的核心工程团队从此隶属于谷歌的Intrinsic,公司策略和优先级的变化仍可能对ROS未来走向产生影响。简而言之,ROS的持续演进现在要仰仗一家跨国巨头的商业考量。如果未来地缘政治或商业竞争出现变化,ROS的开源许可、更新支持甚至漏洞披露机制都有潜在被干预的可能。这种“不确定性”正是政府部门在选型国外开源软件时面临的隐忧。
Dora OS的推出在架构设计、安全可靠和性能表现等方面具有里程碑式的意义:
-
• 安全可靠,高效稳定:Dora OS采用Rust这一新一代系统级编程语言开发。Rust天生具备内存安全和并发安全特性,避免了传统C++ 框架中常见的内存泄漏和线程竞态等问题,大幅提升了机器人系统的稳定性和安全性。同时,Rust语言的性能接近底层,实现了低延迟的数据处理能力,能够满足机器人对实时性的严格要求。相较之下,ROS由于历史原因实时性和安全性较弱,ROS2虽有所改进但复杂度增加,Dora OS在安全与效率上的优势使其成为新一代机器人软件平台的理想选择。

Dora-rs vs ROS2(Python API)
40 MB 随机字节延迟测试对比
-
• 统一架构,端边云协同:Dora OS引入数据流计算的体系架构,在机器人本体(设备端)、边缘服务器和云端之间构建起统一的数据总线和存储查询平台,打破了ROS传统上单机“主从架构”的局限。通过Dora OS,中枢控制模块、传感器数据处理模块、AI算法模块等各组件之间以数据流方式解耦连接,不再局限于单一机器内部的通信。这意味着多个机器人以及云端服务可以实时协同工作:例如,复杂运算由云端完成后迅速下发,本地传感器数据也可实时上传融合。端-边-云的一体化协同赋予机器人系统更强的扩展性和计算能力,使其在工厂等大规模场景下依然能够流畅运行。

数据流配置
-
• 生态兼容,平滑过渡:考虑到ROS在业界已有大量应用,Dora OS特别提供了ROS Bridge模块,可无缝对接ROS/ROS2的现有生态。这使得现有基于ROS的软件和算法能够平滑迁移到Dora OS平台之上,保护了用户过往的开发投资,降低了切换成本。从开发者角度看,Dora OS还充分结合云原生理念,提供灵活的API(支持C++/Rust等),方便开发者快速上手。通过对Python等主流开发环境的友好集成,Dora OS降低了机器人应用开发的门槛,有望培育本土自主的机器人软件生态,打破国外ROS框架的垄断格局。

桥接 ROS2
凭借以上优势,Dora OS为打造全栈自主可控的机器人系统提供了核心支撑。多家公司已经基于Dora OS成功构建出软硬件完全国产化的人形机器人产品雏形,实现了从底层运动控制、传感器驱动到高层决策规划的全面自主可控。值得一提的是,深信科创率先将Dora OS与华为鸿蒙操作系统以及国产人形机器人本体相结合,打造出全国首例软硬件全栈自主可控的人形机器人系统解决方案。
这意味着整套系统不依赖任何国外软件框架,在安全可控方面达到行业最高等级,同时也标志着我国在机器人底层操作系统领域实现了关键性突破。
此外,Dora已经先后被重庆邮电大学、深开鸿、新讯智能科技试配到自动驾驶及人形机器人上,这进一步证明了Dora在国内的巨大发展潜力。
AI_dev:开源 GenAI 和机器学习峰会
欧洲站 2024上的主旨演讲
AI_dev:开源 GenAI 和机器学习峰会
Dora OS中间件+鸿蒙OS+国产本体的组合为我国机器人产业提供了一条可行的自主技术路径:在当前ROS生态存在不确定性的背景下,Dora OS可作为战略替代方案,保障我国机器人产业链的自主可控和安全稳定发展。
相关链接:
Dora仓库地址:https://github.com/dora-rs
Futurewei官网:https://www.futurewei.com
中科大先进技术研究院官网:https://iat.ustc.edu.cn/iat/gcjszx.html
深信科创官网:https://synkrotron.ai/?lang=cn

有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐

 26
26 0
0- 0



 已为社区贡献7条内容
已为社区贡献7条内容

所有评论(0)