智能驾驶的“眼睛”怎么选?6大维度拆解摄像头选型秘籍
智能驾驶摄像头选型需要综合考虑功能需求与性能参数。不同位置摄像头各有特定要求,如分辨率、动态范围、低照度性能等核心参数直接决定成像质量。视场角需平衡探测距离与覆盖范围,帧率需匹配车速需求。环境适应性测试包括极端温度、防水防污和振动耐久性。数据接口和时间同步精度影响系统性能,而集成ISP和边缘AI可提升处理效率。最后需通过车规认证确保量产可靠性。工程师需在各项参数间找到最优平衡,才能打造真正可靠的&
引言
“智能驾驶系统像人类司机,而摄像头就是它的眼睛。但给车装‘眼睛’比配眼镜复杂万倍——暴雨中的隧道强光、逆光下的黑色车辆、120km/h飞驰时的瞬间决策… 选错摄像头,再强的算法也成了‘近视眼’+‘夜盲症’!”
本文将用工程师视角+小白语言,拆解智驾摄像头选型的核心逻辑。
一、先搞清需求:你的摄像头要干啥?
不同位置决定不同“视力要求”(经典5类摄像头):

二、6大核心参数:决定“看得清不清”
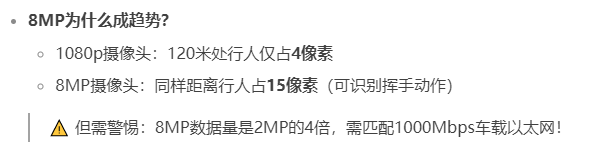
1. 分辨率:不是越高越好!
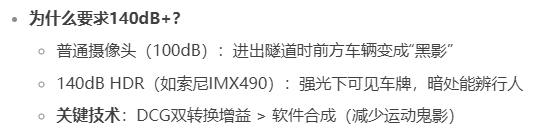
2. 动态范围(HDR):生死攸关的参数
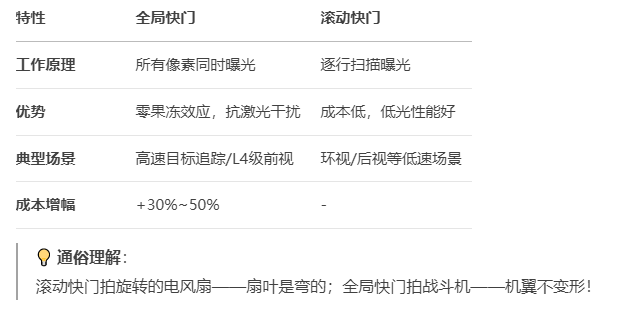
3. 全局快门 vs 滚动快门
4. 低照度性能:夜间行车的命门
关键指标:
-
像素尺寸:>2.0μm优于1.4μm(如豪威科技OX08B40)
-
量子效率:50%+ @ 940nm(舱内摄像必备)
-
信噪比:<1 lux照度下SNR >30dB
5. 视场角(FoV):宽度与距离的博弈
-
前视主摄黄金参数:
-
水平52°:兼顾200米探测+弯道覆盖
-
垂直28°:避免天空信息干扰
-
6. 帧率:运动模糊的克星
-
30fps:行人横穿时速30km可接受
-
60fps:成为L2+标配(应对100km/h场景)
-
120fps:高端方案用于城区无保护左转
三、环境适应性:比参数更重要的生存能力
1. 温度暴力测试
-
-40℃~105℃:镜头不起雾、电路不宕机(特斯拉HW4.0摄像头通过阿拉斯加极寒测试)
2. 防水防污黑科技
-
疏水纳米涂层:雨滴滑落速度比普通玻璃快5倍
-
集成式加热丝:-20℃环境下3分钟除霜
3. 振动耐久性
-
通过ISO 16750-3标准:能承受5G加速度振动(相当于越野路况10万公里)
四、接口与同步:数据高速路的瓶颈
1. 主流接口对比

2. 时间同步生死线
-
PTP授时:确保摄像头与雷达时间戳误差<1ms
-
硬件触发线:多目摄像头曝光同步误差<10μs
五、智能化的进阶选择
1. 集成ISP:减轻域控制器负担
-
好处:原始数据→YUV422输出,带宽降50%
-
推荐:安森美Hayabusa系列(内置3D-LUT色彩校正)
2. 边缘AI摄像头
-
方案:赛灵思Kria K26模组 + 目标检测算法
-
价值:只传输“前方有行人”结构化数据,带宽需求降至1%
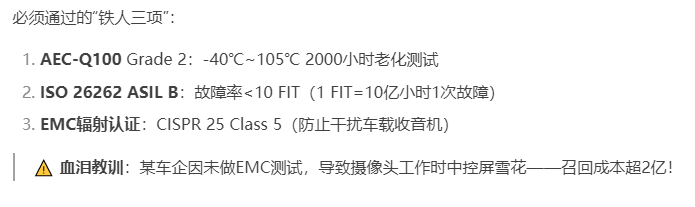
六、车规认证:量产的最后一道防火墙
七、实战选型表格(2024主流方案)


有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐
 3
3 0
0- 0



 已为社区贡献5条内容
已为社区贡献5条内容

所有评论(0)