【信息科学与工程学】【游戏科学】第一篇 游戏引擎17 虚拟与混合现实 VR渲染算法-VR-RD-12 [平面/曲面/空间/VR中的混合渲染模型01
VR-RD-12 [平面/曲面/空间/VR中的混合渲染模型]
系统概述
VR-RD-12 混合渲染算法库是一个全面的、多维度、跨学科的混合渲染算法体系,涵盖从基础混合渲染到高级交叉学科应用的完整算法框架。混合渲染结合多种渲染技术(如前向渲染、延迟渲染、光线追踪、神经渲染等)的优势,实现质量、性能、灵活性的最佳平衡。本库按照技术组合、应用场景、学科交叉、空间维度、时间维度、约束条件、未来技术等多个维度进行组织.
分类架构
第一部分:基础混合渲染算法 (0001-1000)
-
0001-0100: 前向+延迟混合渲染
-
0101-0200: 光栅化+光线追踪混合
-
0201-0300: 实时+离线混合渲染
-
0301-0400: CPU+GPU混合渲染
-
0401-0500: 本地+云端混合渲染
-
0501-0600: 传统+神经混合渲染
-
0601-0700: 确定+概率混合渲染
-
0701-0800: 离散+连续混合渲染
-
0801-0900: 显式+隐式混合渲染
-
0901-1000: 解析+数值混合渲染
第二部分:混合渲染架构 (1001-2000)
-
1001-1100: 混合渲染管线设计
-
1101-1200: 混合渲染数据流
-
1201-1300: 混合渲染同步
-
1301-1400: 混合渲染负载均衡
-
1401-1500: 混合渲染资源管理
-
1501-1600: 混合渲染内存管理
-
1601-1700: 混合渲染带宽优化
-
1701-1800: 混合渲染功耗优化
-
1801-1900: 混合渲染容错
-
1901-2000: 混合渲染自适应
第三部分:前向+延迟混合 (2001-3000)
-
2001-2100: 延迟前向渲染
-
2101-2200: 前向延迟渲染
-
2201-2300: 分块前向延迟
-
2301-2400: 聚类前向延迟
-
2401-2500: 自适应前向延迟
-
2501-2600: 多视图前向延迟
-
2601-2700: 立体前向延迟
-
2701-2800: 动态前向延迟
-
2801-2900: 实时前向延迟
-
2901-3000: 预测性前向延迟
第四部分:光栅化+光线追踪混合 (3001-4000)
-
3001-3100: 光栅化主渲+光线追踪反射
-
3101-3200: 光栅化主渲+光线追踪阴影
-
3201-3300: 光栅化主渲+光线追踪全局光照
-
3301-3400: 光栅化主渲+光线追踪环境光遮蔽
-
3401-3500: 光栅化主渲+光线追踪焦散
-
3501-3600: 光栅化主渲+光线追踪次表面散射
-
3601-3700: 光栅化主渲+光线追踪毛发
-
3701-3800: 光栅化主渲+光线追踪体积
-
3801-3900: 光栅化主渲+光线追踪抗锯齿
-
3901-4000: 光栅化主渲+光线追踪去噪
第五部分:传统+神经混合渲染 (4001-5000)
-
4001-4100: 光栅化+神经辐射场混合
-
4101-4200: 光线追踪+神经辐射场混合
-
4201-4300: 延迟渲染+神经辐射场混合
-
4301-4400: 传统渲染+神经超分辨率
-
4401-4500: 传统渲染+神经去噪
-
4501-4600: 传统渲染+神经抗锯齿
-
4601-4700: 传统渲染+神经风格迁移
-
4701-4800: 传统渲染+神经材质
-
4801-4900: 传统渲染+神经光照
-
4901-5000: 传统渲染+神经动画
第六部分:多设备混合渲染 (5001-6000)
-
5001-5100: CPU+GPU混合计算
-
5101-5200: GPU+GPU混合渲染
-
5201-5300: 本地+云端混合渲染
-
5301-5400: 移动+服务器混合渲染
-
5401-5500: 边缘+云端混合渲染
-
5501-5600: 客户端+服务器混合渲染
-
5601-5700: 多节点混合渲染
-
5701-5800: 异构计算混合渲染
-
5801-5900: 分布式混合渲染
-
5901-6000: 集群混合渲染
第七部分:多尺度混合渲染 (6001-7000)
-
6001-6100: 宏观+微观混合渲染
-
6101-6200: 远距离+近距离混合渲染
-
6201-6300: 低分辨率+高分辨率混合渲染
-
6301-6400: 粗糙+精细混合渲染
-
6401-6500: 简化+详细混合渲染
-
6501-6600: 近似+精确混合渲染
-
6601-6700: 快速+精确混合渲染
-
6701-6800: 实时+离线混合渲染
-
6801-6900: 交互式+批处理混合渲染
-
6901-7000: 渐进式混合渲染
第八部分:跨学科混合渲染 (7001-8000)
-
7001-7100: 物理+数学混合渲染
-
7101-7200: 化学+物理混合渲染
-
7201-7300: 生物+物理混合渲染
-
7301-7400: 工程+科学混合渲染
-
7401-7500: 艺术+技术混合渲染
-
7501-7600: 社会科学+自然科学混合渲染
-
7601-7700: 医学+工程混合渲染
-
7701-7800: 军事+民用混合渲染
-
7801-7900: 教育+娱乐混合渲染
-
7901-8000: 商业+学术混合渲染
第九部分:自适应混合渲染 (8001-9000)
-
8001-8100: 基于场景的混合渲染
-
8101-8200: 基于任务的混合渲染
-
8201-8300: 基于用户的混合渲染
-
8301-8400: 基于设备的混合渲染
-
8401-8500: 基于网络的混合渲染
-
8501-8600: 基于功耗的混合渲染
-
8601-8700: 基于质量的混合渲染
-
8701-8800: 基于性能的混合渲染
-
8801-8900: 基于时间的混合渲染
-
8901-9000: 基于目标的混合渲染
第十部分:未来混合渲染技术 (9001-9999)
-
9001-9100: 量子+经典混合渲染
-
9101-9200: 光子+电子混合渲染
-
9201-9300: 神经形态+传统混合渲染
-
9301-9400: DNA+硅基混合渲染
-
9401-9500: 生物+电子混合渲染
-
9501-9600: 化学+物理混合渲染
-
9601-9700: 分子+宏观混合渲染
-
9701-9800: 可逆+不可逆混合渲染
-
9801-9900: 近似+精确混合渲染
-
9901-9999: 概率+确定混合渲染
VR-RD-12 [混合渲染模型/算法]
1.1 前向+延迟混合渲染 (0001-0100)
|
编号 |
算法名称 |
核心数学方程式/原理 |
关键参数/变量 |
应用场景 |
分步骤时序情况 |
复杂度 |
|---|---|---|---|---|---|---|
|
VR-RD-12-0001 |
基础前向+延迟混合 |
不透明物体用延迟渲染,透明物体用前向渲染:Cfinal=Cdeferred⊗Cforward,⊗为混合操作 |
延迟渲染颜色Cdeferred,前向渲染颜色Cforward,混合操作⊗ |
透明+不透明场景 |
1. 延迟渲染不透明物体O(gd) |
几何O(gd+gf),像素O(p) |
|
VR-RD-12-0002 |
深度剥离前向+延迟 |
多层深度剥离:Di=DepthPeel(Di−1,objects),i=1,...,L |
深度层Di,剥离层数L,物体objects |
复杂透明效果 |
1. 延迟渲染不透明O(gd) |
O(gd+L⋅gf+L⋅p) |
|
VR-RD-12-0003 |
重要性排序前向+延迟 |
按重要性排序渲染:P=SortByImportance(objects),Importance=f(depth,size,material) |
重要性函数f,排序对象objects,优先级P |
复杂场景优化 |
1. 计算重要性O(nlogn) |
O(nlogn+g) |
|
VR-RD-12-0004 |
视距分级前向+延迟 |
近处用延迟,远处用前向:R={DeferredForwardd<dthresholdd≥dthreshold |
距离d,阈值dthreshold,渲染方法R |
大规模场景 |
1. 分割场景O(n) |
O(n+gd+gf+p) |
|
VR-RD-12-0005 |
光源分级前向+延迟 |
主光源用延迟,次光源用前向:L={DeferredForwardI>IthresholdI≤Ithreshold |
光源强度I,阈值Ithreshold,光照方法L |
多光源场景 |
1. 光源分类O(l) |
O(l+ld⋅p+lf⋅g+p) |
|
VR-RD-12-0006 |
材质分级前向+延迟 |
复杂材质用前向,简单材质用延迟:M={ForwardDeferredcomplexsimple |
材质复杂度,分类标准 |
混合材质场景 |
1. 材质分类O(m) |
O(m+gd+gf+p) |
|
VR-RD-12-0007 |
动态切换前向+延迟 |
动态切换:S=Switch(t),基于帧时间t,t<ttarget→Forward,否则Deferred |
帧时间t,目标时间ttarget,切换策略S |
实时性能优化 |
1. 监测帧时间O(1) |
O(g)每帧 |
|
VR-RD-12-0008 |
预测性前向+延迟 |
预测未来状态切换:S^t+1=f(St,Δ),f预测函数 |
当前状态St,变化Δ,预测状态S^t+1 |
平滑过渡 |
1. 收集状态O(1) |
O(g)每帧 |
|
VR-RD-12-0009 |
自适应前向+延迟 |
自适应调整:A=Adapt(P,Q),基于性能P和质量Q |
性能指标P,质量指标Q,自适应策略A |
自动优化 |
1. 监测指标O(1) |
O(g)每帧 |
|
VR-RD-12-0010 |
渐进前向+延迟 |
渐进细化:Ci=Ci−1+ΔCi,i=0,...,N |
迭代i,当前颜色Ci,增量ΔCi |
渐进渲染 |
1. 初始延迟渲染O(gd) |
O(gd+N⋅gf+N⋅p) |
|
VR-RD-12-0011 |
分块前向+延迟 |
屏幕分块:Bij,每块独立选择渲染方法 |
块索引(i,j),块大小,块策略 |
局部优化 |
1. 分块O(p) |
O(p+b+∑gij) |
|
VR-RD-12-0012 |
聚类前向+延迟 |
物体聚类:Ck=Cluster(objects,k),每簇同方法 |
聚类数k,簇Ck,聚类标准 |
批量优化 |
1. 物体聚类O(nlogn) |
O(nlogn+k+∑gk+p) |
|
VR-RD-12-0013 |
多视图前向+延迟 |
不同视图不同方法:Vi:Methodi |
视图Vi,方法Methodi |
多视图系统 |
1. 视图分析O(v) |
O(v+∑gi+v⋅p) |
|
VR-RD-12-0014 |
立体前向+延迟 |
左眼延迟,右眼前向,或组合 |
左眼L,右眼R,立体方法 |
立体渲染 |
1. 左眼延迟O(gd) |
O(gd+gf+p) |
|
VR-RD-12-0015 |
运动前向+延迟 |
静态物体延迟,动态物体前向 |
物体运动状态,分类 |
动态场景 |
1. 检测运动O(n) |
O(n+gs+gd+p) |
|
VR-RD-12-0016 |
光照复杂度前向+延迟 |
高光照复杂度用前向,低用延迟 |
光照复杂度度量,阈值 |
复杂光照 |
1. 评估复杂度O(l⋅n) |
O(l⋅n+n+g+p) |
|
VR-RD-12-0017 |
阴影复杂度前向+延迟 |
复杂阴影用前向,简单阴影用延迟 |
阴影复杂度,分类 |
复杂阴影 |
类似光照复杂度 |
类似光照复杂度 |
|
VR-RD-12-0018 |
反射复杂度前向+延迟 |
复杂反射用前向,简单反射用延迟 |
反射复杂度,分类 |
复杂反射 |
类似光照复杂度 |
类似光照复杂度 |
|
VR-RD-12-0019 |
折射复杂度前向+延迟 |
复杂折射用前向,简单折射用延迟 |
折射复杂度,分类 |
复杂折射 |
类似光照复杂度 |
类似光照复杂度 |
|
VR-RD-12-0020 |
透明复杂度前向+延迟 |
复杂透明用前向,简单透明用延迟 |
透明复杂度,分类 |
复杂透明 |
类似光照复杂度 |
类似光照复杂度 |
|
VR-RD-12-0021 |
毛发复杂度前向+延迟 |
复杂毛发用前向,简单毛发用延迟 |
毛发复杂度,分类 |
毛发渲染 |
类似光照复杂度 |
类似光照复杂度 |
|
VR-RD-12-0022 |
布料复杂度前向+延迟 |
复杂布料用前向,简单布料用延迟 |
布料复杂度,分类 |
布料渲染 |
类似光照复杂度 |
类似光照复杂度 |
|
VR-RD-12-0023 |
皮肤复杂度前向+延迟 |
复杂皮肤用前向,简单皮肤用延迟 |
皮肤复杂度,分类 |
皮肤渲染 |
类似光照复杂度 |
类似光照复杂度 |
|
VR-RD-12-0024 |
水复杂度前向+延迟 |
复杂水用前向,简单水用延迟 |
水复杂度,分类 |
水渲染 |
类似光照复杂度 |
类似光照复杂度 |
|
VR-RD-12-0025 |
火焰复杂度前向+延迟 |
复杂火焰用前向,简单火焰用延迟 |
火焰复杂度,分类 |
火焰渲染 |
类似光照复杂度 |
类似光照复杂度 |
|
VR-RD-12-0026 |
烟雾复杂度前向+延迟 |
复杂烟雾用前向,简单烟雾用延迟 |
烟雾复杂度,分类 |
烟雾渲染 |
类似光照复杂度 |
类似光照复杂度 |
|
VR-RD-12-0027 |
云复杂度前向+延迟 |
复杂云用前向,简单云用延迟 |
云复杂度,分类 |
云渲染 |
类似光照复杂度 |
类似光照复杂度 |
|
VR-RD-12-0028 |
地形复杂度前向+延迟 |
复杂地形用前向,简单地形用延迟 |
地形复杂度,分类 |
地形渲染 |
类似光照复杂度 |
类似光照复杂度 |
|
VR-RD-12-0029 |
建筑复杂度前向+延迟 |
复杂建筑用前向,简单建筑用延迟 |
建筑复杂度,分类 |
建筑渲染 |
类似光照复杂度 |
类似光照复杂度 |
|
VR-RD-12-0030 |
城市复杂度前向+延迟 |
复杂城市用前向,简单城市用延迟 |
城市复杂度,分类 |
城市渲染 |
类似光照复杂度 |
类似光照复杂度 |
|
VR-RD-12-0031 |
森林复杂度前向+延迟 |
复杂森林用前向,简单森林用延迟 |
森林复杂度,分类 |
森林渲染 |
类似光照复杂度 |
类似光照复杂度 |
|
VR-RD-12-0032 |
海洋复杂度前向+延迟 |
复杂海洋用前向,简单海洋用延迟 |
海洋复杂度,分类 |
海洋渲染 |
类似光照复杂度 |
类似光照复杂度 |
|
VR-RD-12-0033 |
太空复杂度前向+延迟 |
复杂太空用前向,简单太空用延迟 |
太空复杂度,分类 |
太空渲染 |
类似光照复杂度 |
类似光照复杂度 |
|
VR-RD-12-0034 |
微观复杂度前向+延迟 |
复杂微观用前向,简单微观用延迟 |
微观复杂度,分类 |
微观渲染 |
类似光照复杂度 |
类似光照复杂度 |
|
VR-RD-12-0035 |
宏观复杂度前向+延迟 |
复杂宏观用前向,简单宏观用延迟 |
宏观复杂度,分类 |
宏观渲染 |
类似光照复杂度 |
类似光照复杂度 |
|
VR-RD-12-0036 |
艺术复杂度前向+延迟 |
复杂艺术用前向,简单艺术用延迟 |
艺术复杂度,分类 |
艺术渲染 |
类似光照复杂度 |
类似光照复杂度 |
|
VR-RD-12-0037 |
科学可视化复杂度前向+延迟 |
复杂科学用前向,简单科学用延迟 |
科学复杂度,分类 |
科学可视化 |
类似光照复杂度 |
类似光照复杂度 |
|
VR-RD-12-0038 |
医学图像复杂度前向+延迟 |
复杂医学用前向,简单医学用延迟 |
医学复杂度,分类 |
医学图像 |
类似光照复杂度 |
类似光照复杂度 |
|
VR-RD-12-0039 |
遥感图像复杂度前向+延迟 |
复杂遥感用前向,简单遥感用延迟 |
遥感复杂度,分类 |
遥感图像 |
类似光照复杂度 |
类似光照复杂度 |
|
VR-RD-12-0040 |
监控视频复杂度前向+延迟 |
复杂监控用前向,简单监控用延迟 |
监控复杂度,分类 |
监控视频 |
类似光照复杂度 |
类似光照复杂度 |
|
VR-RD-12-0041 |
电影制作复杂度前向+延迟 |
复杂电影用前向,简单电影用延迟 |
电影复杂度,分类 |
电影制作 |
类似光照复杂度 |
类似光照复杂度 |
|
VR-RD-12-0042 |
游戏渲染复杂度前向+延迟 |
复杂游戏用前向,简单游戏用延迟 |
游戏复杂度,分类 |
游戏渲染 |
类似光照复杂度 |
类似光照复杂度 |
|
VR-RD-12-0043 |
虚拟现实复杂度前向+延迟 |
复杂VR用前向,简单VR用延迟 |
VR复杂度,分类 |
VR渲染 |
类似光照复杂度 |
类似光照复杂度 |
|
VR-RD-12-0044 |
增强现实复杂度前向+延迟 |
复杂AR用前向,简单AR用延迟 |
AR复杂度,分类 |
AR渲染 |
类似光照复杂度 |
类似光照复杂度 |
|
VR-RD-12-0045 |
混合现实复杂度前向+延迟 |
复杂MR用前向,简单MR用延迟 |
MR复杂度,分类 |
MR渲染 |
类似光照复杂度 |
类似光照复杂度 |
|
VR-RD-12-0046 |
3D显示复杂度前向+延迟 |
复杂3D用前向,简单3D用延迟 |
3D复杂度,分类 |
3D显示 |
类似光照复杂度 |
类似光照复杂度 |
|
VR-RD-12-0047 |
全息显示复杂度前向+延迟 |
复杂全息用前向,简单全息用延迟 |
全息复杂度,分类 |
全息显示 |
类似光照复杂度 |
类似光照复杂度 |
|
VR-RD-12-0048 |
光场显示复杂度前向+延迟 |
复杂光场用前向,简单光场用延迟 |
光场复杂度,分类 |
光场显示 |
类似光照复杂度 |
类似光照复杂度 |
|
VR-RD-12-0049 |
视网膜投影复杂度前向+延迟 |
复杂视网膜用前向,简单视网膜用延迟 |
视网膜复杂度,分类 |
视网膜投影 |
类似光照复杂度 |
类似光照复杂度 |
|
VR-RD-12-0050 |
眼戴式显示复杂度前向+延迟 |
复杂头戴用前向,简单头戴用延迟 |
头戴复杂度,分类 |
头戴显示 |
类似光照复杂度 |
类似光照复杂度 |
|
VR-RD-12-0051 |
投影显示复杂度前向+延迟 |
复杂投影用前向,简单投影用延迟 |
投影复杂度,分类 |
投影显示 |
类似光照复杂度 |
类似光照复杂度 |
|
VR-RD-12-0052 |
液晶显示复杂度前向+延迟 |
复杂LCD用前向,简单LCD用延迟 |
LCD复杂度,分类 |
LCD显示 |
类似光照复杂度 |
类似光照复杂度 |
|
VR-RD-12-0053 |
OLED显示复杂度前向+延迟 |
复杂OLED用前向,简单OLED用延迟 |
OLED复杂度,分类 |
OLED显示 |
类似光照复杂度 |
类似光照复杂度 |
|
VR-RD-12-0054 |
微LED显示复杂度前向+延迟 |
复杂微LED用前向,简单微LED用延迟 |
微LED复杂度,分类 |
微LED显示 |
类似光照复杂度 |
类似光照复杂度 |
|
VR-RD-12-0055 |
量子点显示复杂度前向+延迟 |
复杂量子点用前向,简单量子点用延迟 |
量子点复杂度,分类 |
量子点显示 |
类似光照复杂度 |
类似光照复杂度 |
|
VR-RD-12-0056 |
电泳显示复杂度前向+延迟 |
复杂电泳用前向,简单电泳用延迟 |
电泳复杂度,分类 |
电泳显示 |
类似光照复杂度 |
类似光照复杂度 |
|
VR-RD-12-0057 |
电润湿显示复杂度前向+延迟 |
复杂电润湿用前向,简单电润湿用延迟 |
电润湿复杂度,分类 |
电润湿显示 |
类似光照复杂度 |
类似光照复杂度 |
|
VR-RD-12-0058 |
电致变色显示复杂度前向+延迟 |
复杂电致变色用前向,简单电致变色用延迟 |
电致变色复杂度,分类 |
电致变色显示 |
类似光照复杂度 |
类似光照复杂度 |
|
VR-RD-12-0059 |
光子晶体显示复杂度前向+延迟 |
复杂光子晶体用前向,简单光子晶体用延迟 |
光子晶体复杂度,分类 |
光子晶体显示 |
类似光照复杂度 |
类似光照复杂度 |
|
VR-RD-12-0060 |
激光显示复杂度前向+延迟 |
复杂激光用前向,简单激光用延迟 |
激光复杂度,分类 |
激光显示 |
类似光照复杂度 |
类似光照复杂度 |
|
VR-RD-12-0061 |
等离子显示复杂度前向+延迟 |
复杂等离子用前向,简单等离子用延迟 |
等离子复杂度,分类 |
等离子显示 |
类似光照复杂度 |
类似光照复杂度 |
|
VR-RD-12-0062 |
场发射显示复杂度前向+延迟 |
复杂场发射用前向,简单场发射用延迟 |
场发射复杂度,分类 |
场发射显示 |
类似光照复杂度 |
类似光照复杂度 |
|
VR-RD-12-0063 |
真空荧光显示复杂度前向+延迟 |
复杂真空荧光用前向,简单真空荧光用延迟 |
真空荧光复杂度,分类 |
真空荧光显示 |
类似光照复杂度 |
类似光照复杂度 |
|
VR-RD-12-0064 |
发光二极管显示复杂度前向+延迟 |
复杂LED用前向,简单LED用延迟 |
LED复杂度,分类 |
LED显示 |
类似光照复杂度 |
类似光照复杂度 |
|
VR-RD-12-0065 |
阴极射线管显示复杂度前向+延迟 |
复杂CRT用前向,简单CRT用延迟 |
CRT复杂度,分类 |
CRT显示 |
类似光照复杂度 |
类似光照复杂度 |
|
VR-RD-12-0066 |
数字光处理显示复杂度前向+延迟 |
复杂DLP用前向,简单DLP用延迟 |
DLP复杂度,分类 |
DLP显示 |
类似光照复杂度 |
类似光照复杂度 |
|
VR-RD-12-0067 |
液晶硅显示复杂度前向+延迟 |
复杂LCoS用前向,简单LCoS用延迟 |
LCoS复杂度,分类 |
LCoS显示 |
类似光照复杂度 |
类似光照复杂度 |
|
VR-RD-12-0068 |
数字微镜显示复杂度前向+延迟 |
复杂DMD用前向,简单DMD用延迟 |
DMD复杂度,分类 |
DMD显示 |
类似光照复杂度 |
类似光照复杂度 |
|
VR-RD-12-0069 |
干涉调制显示复杂度前向+延迟 |
复杂IMOD用前向,简单IMOD用延迟 |
IMOD复杂度,分类 |
IMOD显示 |
类似光照复杂度 |
类似光照复杂度 |
|
VR-RD-12-0070 |
电泳粒子显示复杂度前向+延迟 |
复杂电泳粒子用前向,简单电泳粒子用延迟 |
电泳粒子复杂度,分类 |
电泳粒子显示 |
类似光照复杂度 |
类似光照复杂度 |
|
VR-RD-12-0071 |
电致发光显示复杂度前向+延迟 |
复杂电致发光用前向,简单电致发光用延迟 |
电致发光复杂度,分类 |
电致发光显示 |
类似光照复杂度 |
类似光照复杂度 |
|
VR-RD-12-0072 |
光致发光显示复杂度前向+延迟 |
复杂光致发光用前向,简单光致发光用延迟 |
光致发光复杂度,分类 |
光致发光显示 |
类似光照复杂度 |
类似光照复杂度 |
|
VR-RD-12-0073 |
化学发光显示复杂度前向+延迟 |
复杂化学发光用前向,简单化学发光用延迟 |
化学发光复杂度,分类 |
化学发光显示 |
类似光照复杂度 |
类似光照复杂度 |
|
VR-RD-12-0074 |
生物发光显示复杂度前向+延迟 |
复杂生物发光用前向,简单生物发光用延迟 |
生物发光复杂度,分类 |
生物发光显示 |
类似光照复杂度 |
类似光照复杂度 |
|
VR-RD-12-0075 |
放射性发光显示复杂度前向+延迟 |
复杂放射性发光用前向,简单放射性发光用延迟 |
放射性发光复杂度,分类 |
放射性发光显示 |
类似光照复杂度 |
类似光照复杂度 |
|
VR-RD-12-0076 |
热致发光显示复杂度前向+延迟 |
复杂热致发光用前向,简单热致发光用延迟 |
热致发光复杂度,分类 |
热致发光显示 |
类似光照复杂度 |
类似光照复杂度 |
|
VR-RD-12-0077 |
摩擦发光显示复杂度前向+延迟 |
复杂摩擦发光用前向,简单摩擦发光用延迟 |
摩擦发光复杂度,分类 |
摩擦发光显示 |
类似光照复杂度 |
类似光照复杂度 |
|
VR-RD-12-0078 |
声致发光显示复杂度前向+延迟 |
复杂声致发光用前向,简单声致发光用延迟 |
声致发光复杂度,分类 |
声致发光显示 |
类似光照复杂度 |
类似光照复杂度 |
|
VR-RD-12-0079 |
压电发光显示复杂度前向+延迟 |
复杂压电发光用前向,简单压电发光用延迟 |
压电发光复杂度,分类 |
压电发光显示 |
类似光照复杂度 |
类似光照复杂度 |
|
VR-RD-12-0080 |
磁致发光显示复杂度前向+延迟 |
复杂磁致发光用前向,简单磁致发光用延迟 |
磁致发光复杂度,分类 |
磁致发光显示 |
类似光照复杂度 |
类似光照复杂度 |
|
VR-RD-12-0081 |
电化学发光显示复杂度前向+延迟 |
复杂电化学发光用前向,简单电化学发光用延迟 |
电化学发光复杂度,分类 |
电化学发光显示 |
类似光照复杂度 |
类似光照复杂度 |
|
VR-RD-12-0082 |
光电化学发光显示复杂度前向+延迟 |
复杂光电化学发光用前向,简单光电化学发光用延迟 |
光电化学发光复杂度,分类 |
光电化学发光显示 |
类似光照复杂度 |
类似光照复杂度 |
|
VR-RD-12-0083 |
生物电化学发光显示复杂度前向+延迟 |
复杂生物电化学发光用前向,简单生物电化学发光用延迟 |
生物电化学发光复杂度,分类 |
生物电化学发光显示 |
类似光照复杂度 |
类似光照复杂度 |
|
VR-RD-12-0084 |
酶促发光显示复杂度前向+延迟 |
复杂酶促发光用前向,简单酶促发光用延迟 |
酶促发光复杂度,分类 |
酶促发光显示 |
类似光照复杂度 |
类似光照复杂度 |
|
VR-RD-12-0085 |
免疫发光显示复杂度前向+延迟 |
复杂免疫发光用前向,简单免疫发光用延迟 |
免疫发光复杂度,分类 |
免疫发光显示 |
类似光照复杂度 |
类似光照复杂度 |
|
VR-RD-12-0086 |
前向+延迟混合渲染性能分析 |
分析性能:P=f(gd,gf,p,ld,lf) |
性能指标P,影响因素gd,gf,p,ld,lf |
性能优化 |
1. 收集数据O(1) |
O(1) |
|
VR-RD-12-0087 |
前向+延迟混合渲染质量分析 |
分析质量:Q=g(gd,gf,p,ld,lf) |
质量指标Q,影响因素gd,gf,p,ld,lf |
质量优化 |
类似性能分析 |
类似性能分析 |
|
VR-RD-12-0088 |
前向+延迟混合渲染功耗分析 |
分析功耗:E=h(gd,gf,p,ld,lf) |
功耗E,影响因素gd,gf,p,ld,lf |
功耗优化 |
类似性能分析 |
类似性能分析 |
|
VR-RD-12-0089 |
前向+延迟混合渲染内存分析 |
分析内存:M=k(gd,gf,p,ld,lf) |
内存M,影响因素gd,gf,p,ld,lf |
内存优化 |
类似性能分析 |
类似性能分析 |
|
VR-RD-12-0090 |
前向+延迟混合渲染带宽分析 |
分析带宽:B=m(gd,gf,p,ld,lf) |
带宽B,影响因素gd,gf,p,ld,lf |
带宽优化 |
类似性能分析 |
类似性能分析 |
|
VR-RD-12-0091 |
前向+延迟混合渲染温度分析 |
分析温度:T=n(gd,gf,p,ld,lf) |
温度T,影响因素gd,gf,p,ld,lf |
热管理 |
类似性能分析 |
类似性能分析 |
|
VR-RD-12-0092 |
前向+延迟混合渲染可靠性分析 |
分析可靠性:R=o(gd,gf,p,ld,lf) |
可靠性R,影响因素gd,gf,p,ld,lf |
可靠性优化 |
类似性能分析 |
类似性能分析 |
|
VR-RD-12-0093 |
前向+延迟混合渲染安全性分析 |
分析安全性:S=q(gd,gf,p,ld,lf) |
安全性S,影响因素gd,gf,p,ld,lf |
安全优化 |
类似性能分析 |
类似性能分析 |
|
VR-RD-12-0094 |
前向+延迟混合渲染隐私分析 |
分析隐私:P=r(gd,gf,p,ld,lf) |
隐私P,影响因素gd,gf,p,ld,lf |
隐私保护 |
类似性能分析 |
类似性能分析 |
|
VR-RD-12-0095 |
前向+延迟混合渲染伦理分析 |
分析伦理:E=s(gd,gf,p,ld,lf) |
伦理E,影响因素gd,gf,p,ld,lf |
伦理考虑 |
类似性能分析 |
类似性能分析 |
|
VR-RD-12-0096 |
前向+延迟混合渲染法律分析 |
分析法律:L=t(gd,gf,p,ld,lf) |
法律L,影响因素gd,gf,p,ld,lf |
法律合规 |
类似性能分析 |
类似性能分析 |
|
VR-RD-12-0097 |
前向+延迟混合渲染标准化分析 |
分析标准化:S=u(gd,gf,p,ld,lf) |
标准化S,影响因素gd,gf,p,ld,lf |
标准化 |
类似性能分析 |
类似性能分析 |
|
VR-RD-12-0098 |
前向+延迟混合渲染研究分析 |
分析研究:R=v(gd,gf,p,ld,lf) |
研究R,影响因素gd,gf,p,ld,lf |
学术研究 |
类似性能分析 |
类似性能分析 |
|
VR-RD-12-0099 |
前向+延迟混合渲染教育分析 |
分析教育:E=w(gd,gf,p,ld,lf) |
教育E,影响因素gd,gf,p,ld,lf |
教育培训 |
类似性能分析 |
类似性能分析 |
|
VR-RD-12-0100 |
前向+延迟混合渲染艺术分析 |
分析艺术:A=x(gd,gf,p,ld,lf) |
艺术A,影响因素gd,gf,p,ld,lf |
艺术创作 |
类似性能分析 |
类似性能分析 |
算法库特色:
-
系统性完整:从基础到高级,从理论到应用
-
跨学科融合:涵盖物理、化学、生物、数学、工程、艺术、社会科学等众多学科
-
多维度分析:空间、时间、拓扑、代数、几何、物理、化学、生物、社会等多个维度
-
实际应用广泛:包含工业、医疗、教育、娱乐、科学、工程、艺术等众多应用领域
-
技术前沿覆盖:包含传统渲染、光线追踪、神经渲染、量子计算等先进技术
-
可扩展性强:模块化设计,便于添加新算法和新应用
VR-RD-12- 基础混合渲染算法 (0001-0040)
|
编号 |
模型/算法名称 |
模型/算法的逐步骤思考推理的数学方程式 |
参数/常量/变量情况 |
应用场景及特征 |
分步骤时序情况及数学方程式 |
复杂度 精度 密度 误差 数学特征 数据特征 关联知识点 |
|---|---|---|---|---|---|---|
|
VR-RD-12-0001 |
基础不透明延迟+透明前向混合 |
思考推理: |
参数: |
应用场景:游戏引擎、实时可视化、含透明物体的场景 |
分步骤时序: |
复杂度:O(nopaque⋅l+ntransparent⋅m) |
|
VR-RD-12-0002 |
深度剥离多层透明混合 |
思考推理: |
参数: |
应用场景:复杂透明物体(玻璃、液体、毛发) |
分步骤时序: |
复杂度:O(nlayers⋅ntransparent) |
|
VR-RD-12-0003 |
重要性排序混合渲染 |
思考推理: |
参数: |
应用场景:实时渲染、性能受限系统 |
分步骤时序: |
Q |
|
VR-RD-12-0004 |
视距分级混合渲染 |
思考推理: |
参数: |
应用场景:开放世界、大规模场景 |
分步骤时序: |
d<d_1})<br>4.∗∗中间延迟∗∗:RenderDeferred({o |
|
VR-RD-12-0005 |
光源分级混合渲染 |
思考推理: |
I_L(l)>I{threshold}}<br>4.渲染:主光源延迟,次光源前向<br>5.合成:C=C{deferred}(L{main})+∑C{forward}(L_{secondary})$ |
参数: |
应用场景:多光源场景、动态光照 |
分步骤时序: |
|
VR-RD-12-0006 |
材质复杂度分级混合 |
思考推理: |
参数: |
应用场景:复杂材质场景、着色器密集型 |
分步骤时序: |
C_M(m)>C{threshold}}<br>3.∗∗简单材质延迟∗∗:RenderDeferred(M\backslash M{complex})<br>4.∗∗复杂材质前向∗∗:RenderForward(M{complex})<br>5.∗∗合成∗∗:C{final}=Composite()$ |
|
VR-RD-12-0007 |
动态切换前向+延迟 |
思考推理: |
FPS-FPS_{target} |
<δ$ |
参数: |
应用场景:动态场景、性能敏感应用 |
|
VR-RD-12-0008 |
预测性混合渲染切换 |
思考推理: |
参数: |
应用场景:动态负载预测、平滑切换 |
分步骤时序: |
复杂度:O(W2)预测 + O(1)决策 |
|
VR-RD-12-0009 |
自适应混合渲染 |
思考推理: |
参数: |
应用场景:自动调优、自适应系统 |
分步骤时序: |
复杂度:O(T⋅g)学习 + 渲染 |
|
VR-RD-12-0010 |
渐进混合渲染 |
思考推理: |
参数: |
应用场景:交互式高质量渲染、渐进加载 |
分步骤时序: |
复杂度:O(∑i=0Ngi)累积 |
|
编号 |
模型/算法名称 |
模型/算法的逐步骤思考推理的数学方程式 |
参数/常量/变量情况 |
应用场景及特征 |
分步骤时序情况及数学方程式 |
复杂度 精度 密度 误差 数学特征 数据特征 关联知识点 |
|---|---|---|---|---|---|---|
|
VR-RD-12-0011 |
分块混合渲染 |
思考推理: |
参数: |
应用场景:屏幕空间自适应渲染、局部特效 |
分步骤时序: |
复杂度:O(MN⋅(pb+gij)) |
|
VR-RD-12-0012 |
聚类混合渲染 |
思考推理: |
C_k |
}∑{o∈C_k} P(o)<br>3.聚类特征:F_k = Aggregate({f(o): o∈C_k})<br>4.聚类决策:R_k = \begin{cases} Forward & Cost{forward}(C_k)<Cost_{deferred}(C_k) \Deferred & otherwise \end{cases}<br>5.聚类渲染:RenderCluster(C_k, R_k)$ |
参数: |
应用场景:大规模场景、实例化物体 |
|
VR-RD-12-0013 |
多视图混合渲染 |
思考推理: |
参数: |
应用场景:多窗口应用、画中画、多视角监控 |
分步骤时序: |
复杂度:O(m+∑gi+m⋅pi) |
|
VR-RD-12-0014 |
立体混合渲染 |
思考推理: |
参数: |
应用场景:VR/AR、3D显示、立体电影 |
分步骤时序: |
复杂度:O(gd+p+gf/gd) |
|
VR-RD-12-0015 |
运动状态混合渲染 |
思考推理: |
参数: |
应用场景:动态场景、物理模拟、游戏 |
分步骤时序: |
O_s |
|
VR-RD-12-0016 |
光照复杂度混合渲染 |
思考推理: |
参数: |
应用场景:复杂光照场景、多光源、动态阴影 |
分步骤时序: |
复杂度:O(p⋅(L+k2)) |
|
VR-RD-12-0017 |
阴影复杂度混合渲染 |
思考推理: |
参数: |
应用场景:软阴影、接触硬化、复杂遮挡 |
分步骤时序: |
复杂度:O(p⋅(S+E[q(x)])) |
|
VR-RD-12-0018 |
反射复杂度混合渲染 |
思考推理: |
参数: |
应用场景:高反射表面、镜面、金属 |
分步骤时序: |
复杂度:O(p⋅(1+αr)) |
|
VR-RD-12-0019 |
折射复杂度混合渲染 |
思考推理: |
参数: |
应用场景:透明材质、透镜、液体 |
分步骤时序: |
复杂度:O(p⋅(1+αs)) |
|
VR-RD-12-0020 |
透明度复杂度混合渲染 |
思考推理: |
参数: |
应用场景:复杂透明、粒子系统、毛发 |
分步骤时序: |
复杂度:O(p⋅Leff) |
|
编号 |
模型/算法名称 |
模型/算法的逐步骤思考推理的数学方程式 |
参数/常量/变量情况 |
应用场景及特征 |
分步骤时序情况及数学方程式 |
复杂度 精度 密度 误差 数学特征 数据特征 关联知识点 |
|---|---|---|---|---|---|---|
|
VR-RD-12-0031 |
森林复杂度混合渲染 |
思考推理: |
参数: |
应用场景:森林、树林、植被场景 |
分步骤时序: |
复杂度:O(n+ninst+nbb) |
|
VR-RD-12-0032 |
海洋复杂度混合渲染 |
思考推理: |
∇η |
\cdot f<br>3.渲染技术:T(x)=\begin{cases} FFT+Gerster & C{ocean}>T_o \Tessendorf & otherwise \end{cases}<br>4.FFT+Gerster波用于复杂海面,Tessendorf快速模拟用于简单<br>5.混合:η{mix}=w·η{FFT}+(1-w)·η{Tess}$ |
参数: |
应用场景:海洋模拟、航海仿真、游戏 |
|
VR-RD-12-0033 |
太空复杂度混合渲染 |
思考推理: |
参数: |
应用场景:太空模拟、天文可视化、科幻游戏 |
分步骤时序: |
复杂度:O(nlogn+V⋅s+nstar) |
|
VR-RD-12-0034 |
微观复杂度混合渲染 |
思考推理: |
参数: |
应用场景:分子可视化、材料科学、化学教育 |
分步骤时序: |
复杂度:O(n+V⋅q+natom) |
|
VR-RD-12-0035 |
宏观复杂度混合渲染 |
思考推理: |
参数: |
应用场景:宇宙学模拟、天体物理、科学可视化 |
分步骤时序: |
复杂度:O(N2+N3+npart+V) |
|
VR-RD-12-0036 |
艺术复杂度混合渲染 |
思考推理: |
参数: |
应用场景:数字艺术、风格化渲染、游戏美术 |
分步骤时序: |
复杂度:O(n+NN+nproc) |
|
VR-RD-12-0037 |
科学可视化混合渲染 |
思考推理: |
∇S |
+ |
∇×V |
+ |
|
VR-RD-12-0038 |
医学图像混合渲染 |
思考推理: |
∇H |
+w_2·I+w_3·L<br>3.渲染技术:T(x)=\begin{cases} MIP& C_{med}>T_m \MPR & otherwise \end{cases}$ |
参数: |
应用场景:医学影像、手术规划、诊断辅助 |
|
VR-RD-12-0039 |
遥感图像混合渲染 |
思考推理: |
参数: |
应用场景:地理信息系统、环境监测、城市规划 |
分步骤时序: |
∇DEM |
|
VR-RD-12-0040 |
监控视频混合渲染 |
思考推理: |
参数: |
应用场景:安防监控、智能交通、行为分析 |
分步骤时序: |
复杂度:O(w⋅h+NN+nobj) |
VR-RD-12- 基础混合渲染算法 (0041-0050) 详细分析
|
编号 |
模型/算法名称 |
模型/算法的逐步骤思考推理的数学方程式 |
参数/常量/变量情况 |
应用场景及特征 |
分步骤时序情况及数学方程式 |
复杂度 精度 密度 误差 数学特征 数据特征 关联知识点 |
|---|---|---|---|---|---|---|
|
VR-RD-12-0041 |
电影制作复杂度混合渲染 |
思考推理: |
参数: |
应用场景:电影制作,视觉特效,高质渲染 |
分步骤时序: |
复杂度:O(s⋅p⋅b+g) |
|
VR-RD-12-0042 |
游戏渲染复杂度混合渲染 |
思考推理: |
参数: |
应用场景:实时游戏,交互应用 |
分步骤时序: |
复杂度:O(gd⋅l+gf) |
|
VR-RD-12-0043 |
虚拟现实复杂度混合渲染 |
思考推理: |
参数: |
应用场景:虚拟现实,沉浸体验 |
分步骤时序: |
复杂度:O(∑pi⋅ri+2g) |
|
VR-RD-12-0044 |
增强现实复杂度混合渲染 |
思考推理: |
参数: |
应用场景:增强现实,移动设备 |
分步骤时序: |
复杂度:O(w⋅h+gv) |
|
VR-RD-12-0045 |
混合现实复杂度混合渲染 |
思考推理: |
参数: |
应用场景:混合现实,空间计算 |
分步骤时序: |
复杂度:O(V+n⋅m+V⋅s+g) |
|
VR-RD-12-0046 |
3D显示复杂度混合渲染 |
思考推理: |
参数: |
应用场景:3D显示,自动立体 |
分步骤时序: |
复杂度:O(N⋅g+N⋅p) |
|
VR-RD-12-0047 |
全息显示复杂度混合渲染 |
思考推理: |
R+O |
^2$ |
参数: |
应用场景:全息显示,波前显示 |
|
VR-RD-12-0048 |
光场显示复杂度混合渲染 |
思考推理: |
参数: |
应用场景:光场显示,多视角 |
分步骤时序: |
复杂度:O(Na⋅Ns⋅Nray) |
|
VR-RD-12-0049 |
视网膜投影复杂度混合渲染 |
思考推理: |
参数: |
应用场景:视网膜投影显示 |
分步骤时序: |
复杂度:O(∑pi⋅ri+g) |
|
VR-RD-12-0050 |
头戴显示复杂度混合渲染 |
思考推理: |
参数: |
应用场景:头戴显示,VR/AR |
分步骤时序: |
复杂度:O(g+p) |
VR-RD-12- 基础混合渲染算法 (0051-0070) 详细分析
前向+延迟混合渲染算法深度解析 (续)
|
编号 |
模型/算法名称 |
模型/算法的逐步骤思考推理的数学方程式 |
参数/常量/变量情况 |
应用场景及特征 |
分步骤时序情况及数学方程式 |
复杂度 精度 密度 误差 数学特征 数据特征 关联知识点 |
|---|---|---|---|---|---|---|
|
VR-RD-12-0051 |
投影显示复杂度混合渲染 |
思考推理: |
参数: |
应用场景:投影映射,沉浸式投影 |
分步骤时序: |
复杂度:O(n+g+p) |
|
VR-RD-12-0052 |
液晶显示复杂度混合渲染 |
思考推理: |
参数: |
应用场景:LCD显示,子像素渲染 |
分步骤时序: |
复杂度:O(p) |
|
VR-RD-12-0053 |
OLED显示复杂度混合渲染 |
思考推理: |
参数: |
应用场景:OLED显示,HDR内容 |
分步骤时序: |
复杂度:O(p) |
|
VR-RD-12-0054 |
微LED显示复杂度混合渲染 |
思考推理: |
参数: |
应用场景:微LED显示,大尺寸显示 |
分步骤时序: |
复杂度:O(n+g+p) |
|
VR-RD-12-0055 |
量子点显示复杂度混合渲染 |
思考推理: |
参数: |
应用场景:量子点增强显示,高色域显示 |
分步骤时序: |
复杂度:O(p⋅w) |
|
VR-RD-12-0056 |
电泳显示复杂度混合渲染 |
思考推理: |
参数: |
应用场景:电子纸,电子阅读器 |
分步骤时序: |
复杂度:O(p⋅t) |
|
VR-RD-12-0057 |
电润湿显示复杂度混合渲染 |
思考推理: |
参数: |
应用场景:电润湿显示,可调光器件 |
分步骤时序: |
复杂度:O(n+p) |
|
VR-RD-12-0058 |
电致变色显示复杂度混合渲染 |
思考推理: |
参数: |
应用场景:智能窗,反射式显示 |
分步骤时序: |
复杂度:O(p) |
|
VR-RD-12-0059 |
光子晶体显示复杂度混合渲染 |
思考推理: |
参数: |
应用场景:防伪,装饰,特殊显示 |
分步骤时序: |
复杂度:O(w+p) |
|
VR-RD-12-0060 |
激光显示复杂度混合渲染 |
思考推理: |
参数: |
应用场景:激光投影,激光电视,特殊显示 |
分步骤时序: |
复杂度:O(p+g) |
|
VR-RD-12-0061 |
等离子显示复杂度混合渲染 |
思考推理: |
参数: |
应用场景:等离子电视,大尺寸显示 |
分步骤时序: |
复杂度:O(p) |
|
VR-RD-12-0062 |
场发射显示复杂度混合渲染 |
思考推理: |
参数: |
应用场景:场发射显示,特殊应用 |
分步骤时序: |
复杂度:O(p) |
|
VR-RD-12-0063 |
真空荧光显示复杂度混合渲染 |
思考推理: |
参数: |
应用场景:仪器显示,字符显示 |
分步骤时序: |
复杂度:O(p) |
|
VR-RD-12-0064 |
发光二极管显示复杂度混合渲染 |
思考推理: |
参数: |
应用场景:LED显示屏,广告牌 |
分步骤时序: |
复杂度:O(n+p) |
|
VR-RD-12-0065 |
阴极射线管显示复杂度混合渲染 |
思考推理: |
参数: |
应用场景:CRT显示器,复古应用 |
分步骤时序: |
复杂度:O(p) |
|
VR-RD-12-0066 |
数字光处理复杂度混合渲染 |
思考推理: |
参数: |
应用场景:DLP投影,影院投影 |
分步骤时序: |
复杂度:O(p) |
|
VR-RD-12-0067 |
液晶硅显示复杂度混合渲染 |
思考推理: |
参数: |
应用场景:LCoS投影,近眼显示 |
分步骤时序: |
复杂度:O(p) |
|
VR-RD-12-0068 |
数字微镜显示复杂度混合渲染 |
思考推理: |
参数: |
应用场景:DMD投影,光调制 |
分步骤时序: |
复杂度:O(p⋅b) |
|
VR-RD-12-0069 |
干涉调制显示复杂度混合渲染 |
思考推理: |
参数: |
应用场景:IMOD显示,低功耗显示 |
分步骤时序: |
复杂度:O(p) |
|
VR-RD-12-0070 |
电泳粒子显示复杂度混合渲染 |
思考推理: |
参数: |
应用场景:电泳粒子显示,低功耗显示 |
分步骤时序: |
复杂度:O(n+p) |
VR-RD-12-基础混合渲染算法 (0071-0090) 详细分析
基于空间位置与特征的混合渲染算法深度解析
|
编号 |
模型/算法名称 |
模型/算法的逐步骤思考推理的数学方程式 |
参数/常量/变量情况 |
应用场景及特征 |
分步骤时序情况及数学方程式 |
复杂度 精度 密度 误差 数学特征 数据特征 关联知识点 |
|---|---|---|---|---|---|---|
|
VR-RD-12-0071 |
基于空间网格的混合渲染 |
思考推理: |
参数: |
应用场景:大规模均匀场景,体素化世界 |
分步骤时序: |
复杂度:O(NxNyNz+n) |
|
VR-RD-12-0072 |
基于八叉树的混合渲染 |
思考推理: |
参数: |
应用场景:空间复杂度变化大的场景,点云渲染 |
分步骤时序: |
复杂度:O(nlogn)建树,O(m)渲染 |
|
VR-RD-12-0073 |
基于BSP树的混合渲染 |
思考推理: |
参数: |
应用场景:建筑可视化,室内场景 |
分步骤时序: |
复杂度:O(n2)最坏,O(nlogn)平均 |
|
VR-RD-12-0074 |
基于KD树的混合渲染 |
思考推理: |
参数: |
应用场景:光线追踪,物理仿真 |
分步骤时序: |
复杂度:O(nlogn)建树,O(n)查询 |
|
VR-RD-12-0075 |
基于BVH的混合渲染 |
思考推理: |
参数: |
应用场景:动态场景,碰撞检测 |
分步骤时序: |
复杂度:O(nlogn)建树,O(logn)查询 |
|
VR-RD-12-0076 |
基于四叉树的混合渲染 |
思考推理: |
参数: |
应用场景:地形渲染,大规模地表 |
分步骤时序: |
复杂度:O(nlogn) |
|
VR-RD-12-0077 |
基于场景图的混合渲染 |
思考推理: |
参数: |
应用场景:复杂场景管理,游戏引擎 |
分步骤时序: |
复杂度:$O( |
|
VR-RD-12-0078 |
基于视锥的混合渲染 |
思考推理: |
参数: |
应用场景:开放世界,视点相关渲染 |
分步骤时序: |
复杂度:O(n)测试,O(m)渲染 |
|
VR-RD-12-0079 |
基于深度分层的混合渲染 |
思考推理: |
参数: |
应用场景:景深效果,大气透视 |
分步骤时序: |
复杂度:O(n+k⋅mi) |
|
VR-RD-12-0080 |
基于法线分布的混合渲染 |
思考推理: |
D_N |
}∑{n∈D_N} ‖n-\bar{n}‖^2}<br>3.决策函数:R(x) = \begin{cases} Deferred & σ_N > T{normal} \Forward & otherwise \end{cases}<br>4.空间平滑:R_s = G_σ ∗ R$ |
参数: |
应用场景:几何细节丰富场景,法线贴图 |
|
VR-RD-12-0081 |
基于曲率的混合渲染 |
思考推理: |
κ_1 |
+ |
κ_2 |
<br>4.决策函数:R(x) = \begin{cases} Deferred & C{curv} > T{curv} \Forward & otherwise \end{cases}$ |
|
VR-RD-12-0082 |
基于光照变化的混合渲染 |
思考推理: |
参数: |
应用场景:复杂光照场景,阴影边界,高光区域 |
分步骤时序: |
复杂度:O(p)光照,O(p)梯度 |
|
VR-RD-12-0083 |
基于运动矢量的混合渲染 |
** |
VR-RD-12- 基础混合渲染算法 (0084-0123) 详细分析
基于运动、时间与物理特性的混合渲染算法深度解析
|
编号 |
模型/算法名称 |
模型/算法的逐步骤思考推理的数学方程式 |
参数/常量/变量情况 |
应用场景及特征 |
分步骤时序情况及数学方程式 |
复杂度 精度 密度 误差 数学特征 数据特征 关联知识点 |
|---|---|---|---|---|---|---|
|
VR-RD-12-0084 |
基于运动矢量的混合渲染 |
思考推理: |
参数: |
应用场景:动态场景,运动模糊,时域抗锯齿 |
分步骤时序: |
复杂度:O(p) |
|
VR-RD-12-0085 |
基于时空一致性的混合渲染 |
思考推理: |
参数: |
应用场景:视频渲染,动态全局光照,实时射线追踪 |
分步骤时序: |
复杂度:O(p⋅t) |
|
VR-RD-12-0086 |
基于物理模拟的混合渲染 |
思考推理: |
参数: |
应用场景:物理仿真,科学可视化,工程模拟 |
分步骤时序: |
复杂度:O(n3)物理求解,O(m)渲染 |
|
VR-RD-12-0087 |
基于频域分析的混合渲染 |
思考推理: |
F(u,v) |
^2<br>3.频带复杂度:C{freq} = ∫{Ω} E(u,v) dudv,Ω为高频区域<br>4.决策函数:R(x) = \begin{cases} Deferred & C{freq} > T{freq} \Forward & otherwise \end{cases}$ |
参数: |
应用场景:纹理渲染,抗锯齿,频域渲染 |
|
VR-RD-12-0088 |
基于小波分析的混合渲染 |
思考推理: |
W(a,b) |
^2<br>3.多分辨率分析:V_j = span{φ{j,k}},W_j = span{ψ{j,k}}<br>4.决策函数:R(x) = \begin{cases} Deferred & E(a,b) > T_{wavelet} \Forward & otherwise \end{cases}$ |
参数: |
应用场景:图像压缩,多分辨率渲染,纹理流送 |
|
VR-RD-12-0089 |
基于信息熵的混合渲染 |
思考推理: |
参数: |
应用场景:信息可视化,医学图像,复杂纹理 |
分步骤时序: |
复杂度:$O(p·w^2· |
|
VR-RD-12-0090 |
基于机器学习的混合渲染 |
思考推理: |
参数: |
应用场景:智能渲染,自适应图形,游戏AI |
分步骤时序: |
复杂度:$O(d· |
|
VR-RD-12-0091 |
基于强化学习的混合渲染 |
思考推理: |
参数: |
应用场景:实时策略优化,游戏渲染,自适应系统 |
分步骤时序: |
复杂度:$O( |
|
VR-RD-12-0092 |
基于进化算法的混合渲染 |
思考推理: |
参数: |
应用场景:参数调优,多目标优化,自适应渲染 |
分步骤时序: |
复杂度:O(N⋅G⋅E),G代数,E评估代价 |
|
VR-RD-12-0093 |
基于群体智能的混合渲染 |
思考推理: |
参数: |
应用场景:分布式渲染,多代理系统,集群渲染 |
分步骤时序: |
复杂度:O(M2)完全连接,O(M⋅k)局部连接 |
|
VR-RD-12-0094 |
基于模糊逻辑的混合渲染 |
思考推理: |
参数: |
应用场景:不确定性处理,渐进渲染,质量控制 |
分步骤时序: |
复杂度:$O( |
|
VR-RD-12-0095 |
基于神经网络的混合渲染 |
思考推理: |
参数: |
应用场景:智能渲染,超分辨率,风格迁移 |
分步骤时序: |
复杂度:O(L⋅n2)前向,类似反向 |
|
VR-RD-12-0096 |
基于生成对抗网络的混合渲染 |
思考推理: |
参数: |
应用场景:图像合成,风格迁移,超分辨率 |
分步骤时序: |
复杂度:$O( |
|
VR-RD-12-0097 |
基于变分自编码器的混合渲染 |
思考推理: |
参数: |
应用场景:图像重建,潜在编辑,渐进渲染 |
分步骤时序: |
复杂度:$O( |
|
VR-RD-12-0098 |
基于自编码器的混合渲染 |
思考推理: |
参数: |
应用场景:特征学习,数据压缩,渲染加速 |
分步骤时序: |
复杂度:$O( |
|
VR-RD-12-0099 |
基于稀疏表示的混合渲染 |
思考推理: |
参数: |
应用场景:图像压缩,稀疏渲染,压缩感知 |
分步骤时序: |
复杂度:O(n⋅k)稀疏,O(n⋅m)字典学习 |
|
VR-RD-12-0100 |
基于张量分解的混合渲染 |
思考推理: |
参数: |
应用场景:高维数据,多视角渲染,体积数据 |
分步骤时序: |
复杂度:O(∏Ii)原始,O(R∑Ii)CP |
|
VR-RD-12-0101 |
基于流形学习的混合渲染 |
思考推理: |
参数: |
应用场景:数据可视化,降维渲染,形状分析 |
分步骤时序: |
复杂度:O(n3)最坏,O(n2k)近似 |
|
VR-RD-12-0102 |
基于拓扑数据分析的混合渲染 |
思考推理: |
参数: |
应用场景:科学可视化,形状分析,数据洞察 |
分步骤时序: |
复杂度:O(n3)最坏,O(nω)矩阵化简 |
|
VR-RD-12-0103 |
基于博弈论的混合渲染 |
思考推理: |
参数: |
应用场景:多代理渲染,资源分配,竞争合作 |
分步骤时序: |
复杂度:$O( |
|
编号 |
模型/算法名称 |
模型/算法的逐步骤思考推理的数学方程式 |
参数/常量/变量情况 |
应用场景及特征 |
分步骤时序情况及数学方程式 |
复杂度 精度 密度 误差 数学特征 数据特征 关联知识点 |
|---|---|---|---|---|---|---|
|
VR-RD-12-0104 |
基于控制理论的混合渲染 |
思考推理: |
参数: |
应用场景:实时渲染控制,自适应系统,性能管理 |
分步骤时序: |
复杂度:O(n3)(取决于控制器设计) |
|
VR-RD-12-0105 |
基于信号处理的混合渲染 |
思考推理: |
参数: |
应用场景:图像处理,音频渲染,传感器融合 |
分步骤时序: |
复杂度:O(nlogn)(使用FFT) |
|
VR-RD-12-0106 |
基于信息融合的混合渲染 |
思考推理: |
参数: |
应用场景:多传感器渲染,多视角融合,数据融合 |
分步骤时序: |
复杂度:O(N⋅m),m为单个信息处理代价 |
|
VR-RD-12-0107 |
基于压缩感知的混合渲染 |
思考推理: |
参数: |
应用场景:快速成像,低采样率渲染,资源受限系统 |
分步骤时序: |
复杂度:O(N3)重建,O(MN)测量 |
|
VR-RD-12-0108 |
基于张量网络的混合渲染 |
思考推理: |
参数: |
应用场景:高维数据渲染,量子模拟,机器学习 |
分步骤时序: |
复杂度:O(Dd)收缩,d为网络度 |
|
VR-RD-12-0109 |
基于元学习的混合渲染 |
思考推理: |
参数: |
应用场景:少样本渲染,快速适应新场景,跨任务泛化 |
分步骤时序: |
复杂度:O(T⋅(K⋅Cin+Cout)) |
|
VR-RD-12-0110 |
基于因果推理的混合渲染 |
思考推理: |
参数: |
应用场景:可解释渲染,决策支持,反事实分析 |
分步骤时序: |
复杂度:$O(2^ |
|
VR-RD-12-0111 |
基于微分方程的混合渲染 |
思考推理: |
参数: |
应用场景:物理模拟,动态效果,科学计算可视化 |
分步骤时序: |
复杂度:O(nd),d为维度 |
|
VR-RD-12-0112 |
基于积分方程的混合渲染 |
思考推理: |
参数: |
应用场景:全局光照,电磁散射,声学模拟 |
分步骤时序: |
复杂度:O(n2)直接,O(nlogn)快速方法 |
|
VR-RD-12-0113 |
基于变分法的混合渲染 |
思考推理: |
参数: |
应用场景:图像处理,形状优化,有限元渲染 |
分步骤时序: |
复杂度:O(n3)直接,O(n)迭代 |
|
VR-RD-12-0114 |
基于最优传输的混合渲染 |
思考推理: |
参数: |
应用场景:图像处理,纹理合成,分布匹配 |
分步骤时序: |
复杂度:O(n3logn)一般,O(n2)近似 |
|
VR-RD-12-0115 |
基于随机过程的混合渲染 |
思考推理: |
参数: |
应用场景:蒙特卡洛渲染,噪声生成,随机模拟 |
分步骤时序: |
复杂度:O(n)生成,O(n2)相关计算 |
|
VR-RD-12-0116 |
基于分形理论的混合渲染 |
思考推理: |
参数: |
应用场景:自然景物生成,纹理合成,艺术渲染 |
分步骤时序: |
复杂度:O(mn)指数增长 |
|
VR-RD-12-0117 |
基于计算几何的混合渲染 |
思考推理: |
参数: |
应用场景:CAD,计算机图形学,地理信息系统 |
分步骤时序: |
复杂度:O(nlogn)许多几何算法 |
|
VR-RD-12-0118 |
基于符号计算的混合渲染 |
思考推理: |
参数: |
应用场景:计算机代数,精确渲染,着色器编译 |
分步骤时序: |
复杂度:O(2n)最坏(符号积分) |
|
VR-RD-12-0119 |
基于形式化方法的混合渲染 |
思考推理: |
参数: |
应用场景:安全关键渲染,自动驾驶,航空 |
分步骤时序: |
复杂度:O(2n)状态爆炸 |
|
VR-RD-12-0120 |
基于量子计算的混合渲染 |
思考推理: |
\psi\rangle = \sum_i c_i |
i\rangle,\sum_i |
c_i |
^2 = 1<br>2.量子门:酉变换U,U^\dagger U = I$ |
|
VR-RD-12-0121 |
基于生物启发计算的混合渲染 |
思考推理: |
参数: |
应用场景:优化问题,模式识别,自适应渲染 |
分步骤时序: |
复杂度:O(pop⋅iter⋅cost) |
|
VR-RD-12-0122 |
基于化学反应的混合渲染 |
思考推理: |
参数: |
应用场景:纹理合成,生物模拟,艺术生成 |
分步骤时序: |
复杂度:O(n⋅iter) |
|
VR-RD-12-0123 |
基于社会力学的混合渲染 |
思考推理: |
参数: |
应用场景:人群模拟,交通可视化,应急疏散 |
分步骤时序: |
复杂度:O(n2)全对,O(n)近似 |
这些算法涵盖了从控制理论、信号处理到社会力学等多个领域的混合渲染方法,形成了一个广泛而深入的算法库。
VR-RD-12- 基础混合渲染算法 (0124-0143) 详细分析
基于多学科融合的混合渲染算法深度解析
|
编号 |
模型/算法名称 |
模型/算法的逐步骤思考推理的数学方程式 |
参数/常量/变量情况 |
应用场景及特征 |
分步骤时序情况及数学方程式 |
复杂度 精度 密度 误差 数学特征 数据特征 关联知识点 |
|---|---|---|---|---|---|---|
|
VR-RD-12-0124 |
基于复杂网络的混合渲染 |
思考推理: |
参数: |
应用场景:社交网络,生物网络,知识图谱 |
分步骤时序: |
复杂度:O(N2)力导向,O(N+E)遍历 |
|
VR-RD-12-0125 |
基于多智能体的混合渲染 |
思考推理: |
参数: |
应用场景:游戏AI,机器人集群,交通模拟 |
分步骤时序: |
复杂度:O(M⋅ds)状态更新 |
|
VR-RD-12-0126 |
基于元胞自动机的混合渲染 |
思考推理: |
参数: |
应用场景:自然现象模拟,纹理生成,物理模拟 |
分步骤时序: |
复杂度:O(N⋅M)每步 |
|
VR-RD-12-0127 |
基于L-系统的混合渲染 |
思考推理: |
参数: |
应用场景:植物建模,分形生成,艺术图案 |
分步骤时序: |
复杂度:O(mn)字符串长度指数增长 |
|
VR-RD-12-0128 |
基于语法指导的混合渲染 |
思考推理: |
参数: |
VR-RD-12- 基础混合渲染算法 (0129-0148) 详细分析
基于形式文法与计算数学的混合渲染算法深度解析
|
编号 |
模型/算法名称 |
模型/算法的逐步骤思考推理的数学方程式 |
参数/常量/变量情况 |
应用场景及特征 |
分步骤时序情况及数学方程式 |
复杂度 精度 密度 误差 数学特征 数据特征 关联知识点 |
|---|---|---|---|---|---|---|
|
VR-RD-12-0129 |
基于形式语言的混合渲染 |
思考推理: |
参数: |
应用场景:程序化生成,建筑可视化,语言指导渲染 |
分步骤时序: |
复杂度:$O( |
|
VR-RD-12-0130 |
基于图文法的混合渲染 |
思考推理: |
参数: |
应用场景:图形界面,图表可视化,网络变换 |
分步骤时序: |
复杂度:$O( |
|
VR-RD-12-0131 |
基于形状文法的混合渲染 |
思考推理: |
参数: |
应用场景:建筑设计,产品设计,艺术图案 |
分步骤时序: |
复杂度:$O(n· |
|
VR-RD-12-0132 |
基于计算几何的混合渲染 |
思考推理: |
参数: |
应用场景:CAD/CAM,地理信息系统,计算机图形学 |
分步骤时序: |
复杂度:O(nlogn)许多几何算法 |
|
VR-RD-12-0133 |
基于数值分析的混合渲染 |
思考推理: |
参数: |
应用场景:科学计算,工程仿真,金融建模 |
分步骤时序: |
复杂度:O(n3)直接法,O(n2)迭代法 |
|
VR-RD-12-0134 |
基于偏微分方程的混合渲染 |
思考推理: |
参数: |
应用场景:流体动力学,电磁学,量子力学,图像处理 |
分步骤时序: |
复杂度:O(Nd)空间,O(T/Δt)时间 |
|
VR-RD-12-0135 |
基于积分方程的混合渲染 |
思考推理: |
参数: |
应用场景:辐射传输,势理论,断层成像,计算机图形学 |
分步骤时序: |
复杂度:O(n3)直接,O(n2)迭代,O(nlogn)快速 |
|
VR-RD-12-0136 |
基于变分法的混合渲染 |
思考推理: |
参数: |
应用场景:图像处理,几何建模,物理仿真 |
分步骤时序: |
复杂度:O(n3)直接求解,O(n2)迭代 |
|
VR-RD-12-0137 |
基于最优控制的混合渲染 |
思考推理: |
参数: |
应用场景:实时渲染优化,资源管理,自适应系统 |
分步骤时序: |
复杂度:O(n3)动态规划,O(n2)迭代 |
|
VR-RD-12-0138 |
基于随机过程的混合渲染 |
思考推理: |
参数: |
应用场景:自然现象模拟,金融可视化,不确定性量化 |
分步骤时序: |
复杂度:O(N⋅T)样本生成 |
|
VR-RD-12-0139 |
基于时间序列的混合渲染 |
思考推理: |
参数: |
应用场景:金融图表,传感器数据,性能监控 |
分步骤时序: |
复杂度:O(T2)某些模型,O(TlogT)频谱分析 |
|
VR-RD-12-0140 |
基于信号处理的混合渲染 |
思考推理: |
参数: |
应用场景:图像处理,音频可视化,通信系统 |
分步骤时序: |
复杂度:O(nlogn)FFT,O(n)滤波 |
|
VR-RD-12-0141 |
基于控制理论的混合渲染 |
思考推理: |
参数: |
应用场景:实时系统,自适应渲染,机器人视觉 |
分步骤时序: |
复杂度:O(n3)控制器设计,O(n2)仿真 |
|
VR-RD-12-0142 |
基于系统辨识的混合渲染 |
思考推理: |
参数: |
应用场景:性能建模,自适应系统,数字孪生 |
分步骤时序: |
复杂度:O(N⋅n2)最小二乘,O(N⋅n3)子空间 |
|
VR-RD-12-0143 |
基于滤波器设计的混合渲染 |
思考推理: |
参数: |
应用场景:图像滤波,音频处理,传感器信号 |
分步骤时序: |
复杂度:O(N)每样本,O(NlogN)频域滤波 |
|
VR-RD-12-0144 |
基于通信理论的混合渲染 |
思考推理: |
参数: |
应用场景:网络图形,流媒体,分布式渲染 |
分步骤时序: |
复杂度:O(n)编码,O(n3)最大似然解码 |
|
VR-RD-12-0145 |
基于信息论的混合渲染 |
思考推理: |
参数: |
应用场景:图像压缩,数据简化,感知渲染 |
分步骤时序: |
复杂度:$O( |
|
VR-RD-12-0146 |
基于编码理论的混合渲染 |
思考推理: |
参数: |
应用场景:错误恢复,数据存储,可靠传输 |
分步骤时序: |
复杂度:O(n3)最大似然译码,O(n)编码 |
|
VR-RD-12-0147 |
基于密码学的混合渲染 |
思考推理: |
参数: |
应用场景:数字版权管理,安全渲染,隐私保护 |
分步骤时序: |
复杂度:O(n)对称加密,O(n3)非对称 |
|
VR-RD-12-0148 |
基于网络理论的混合渲染 |
思考推理: |
参数: |
应用场景:分布式渲染,云渲染,渲染农场 |
分步骤时序: |
复杂度:$O( |
注:这些算法涵盖了从形式文法、计算几何、数值分析、偏微分方程、积分方程、变分法、最优控制、随机过程、时间序列、信号处理、控制理论、系统辨识、滤波器设计、通信理论、信息论、编码理论、密码学到网络理论的广泛数学和工程领域在混合渲染中的应用。
VR-RD-12-A 光栅化+光线追踪混合渲染算法 (0101-0115) 详细分析
光栅化与光线追踪混合渲染算法深度解析
|
编号 |
模型/算法名称 |
模型/算法的逐步骤思考推理的数学方程式 |
参数/常量/变量情况 |
应用场景及特征 |
分步骤时序情况及数学方程式 |
复杂度 精度 密度 误差 数学特征 数据特征 关联知识点 |
|---|---|---|---|---|---|---|
|
VR-RD-12-A-0101 |
反射混合渲染 |
思考推理: |
参数: |
应用场景:游戏,实时渲染,高光表面 |
分步骤时序: |
M |
|
VR-RD-12-A-0102 |
阴影混合渲染 |
思考推理: |
参数: |
应用场景:多光源场景,动态阴影 |
分步骤时序: |
L_{main} |
|
VR-RD-12-A-0103 |
环境光遮蔽混合 |
思考推理: |
参数: |
应用场景:全局光照,环境遮挡,实时渲染 |
分步骤时序: |
复杂度:O(p⋅k+α⋅p⋅spp) |
|
VR-RD-12-A-0104 |
折射混合渲染 |
思考推理: |
参数: |
应用场景:玻璃,液体,透明材质 |
分步骤时序: |
复杂度:O(g+β⋅p⋅spp) |
|
VR-RD-12-A-0105 |
焦散混合渲染 |
思考推理: |
参数: |
应用场景:水面,玻璃,珠宝渲染 |
分步骤时序: |
复杂度:O(Np⋅b+p⋅k) |
|
VR-RD-12-A-0106 |
次表面散射混合 |
思考推理: |
参数: |
应用场景:皮肤,蜡,大理石,牛奶 |
分步骤时序: |
复杂度:O(p⋅k+γ⋅p⋅spp) |
|
VR-RD-12-A-0107 |
体积光混合渲染 |
思考推理: |
参数: |
应用场景:雾,烟,灰尘,神光 |
分步骤时序: |
复杂度:O(p+δ⋅p⋅steps) |
|
VR-RD-12-A-0108 |
间接光照混合 |
思考推理: |
参数: |
应用场景:全局光照,室内场景,产品渲染 |
分步骤时序: |
复杂度:O(p⋅k+ε⋅p⋅spp⋅b) |
|
VR-RD-12-A-0109 |
景深混合渲染 |
思考推理: |
参数: |
应用场景:摄影,电影,游戏过场 |
分步骤时序: |
复杂度:O(p⋅k+ζ⋅p⋅spp) |
|
VR-RD-12-A-0110 |
运动模糊混合渲染 |
思考推理: |
参数: |
应用场景:高速运动,动作游戏,电影特效 |
分步骤时序: |
复杂度:O(p⋅k+η⋅p⋅spp) |
|
VR-RD-12-A-0111 |
抗锯齿混合渲染 |
思考推理: |
参数: |
应用场景:实时渲染,高质量输出,VR |
分步骤时序: |
复杂度:O(p+scale2⋅g+p⋅spp) |
|
VR-RD-12-A-0112 |
透明混合渲染 |
思考推理: |
参数: |
应用场景:玻璃,液体,透明物体 |
分步骤时序: |
复杂度:O(g⋅L+θ⋅p⋅spp) |
|
VR-RD-12-A-0113 |
毛发混合渲染 |
思考推理: |
参数: |
应用场景:角色渲染,动物毛发,毛绒玩具 |
分步骤时序: |
复杂度:O(g+ι⋅p⋅spp) |
|
VR-RD-12-A-0114 |
粒子系统混合渲染 |
思考推理: |
参数: |
应用场景:烟雾,火焰,灰尘,魔法效果 |
分步骤时序: |
复杂度:O(g+κ⋅p⋅spp) |
|
VR-RD-12-A-0115 |
贴花混合渲染 |
思考推理: |
参数: |
应用场景:弹孔,涂鸦,污渍,细节增强 |
分步骤时序: |
复杂度:O(g+λ⋅p⋅spp) |
VR-RD-12-A 光栅化+光线追踪混合渲染算法 (0116-0130) 详细分析
光栅化与光线追踪混合渲染算法深度解析(续)
|
编号 |
模型/算法名称 |
模型/算法的逐步骤思考推理的数学方程式 |
参数/常量/变量情况 |
应用场景及特征 |
分步骤时序情况及数学方程式 |
复杂度 精度 密度 误差 数学特征 数据特征 关联知识点 |
|---|---|---|---|---|---|---|
|
VR-RD-12-A-0116 |
全局光照混合渲染 |
思考推理: |
参数: |
应用场景:实时全局光照,室内场景,建筑可视化 |
分步骤时序: |
复杂度:O(g⋅l+p⋅spp⋅b) |
|
VR-RD-12-A-0117 |
镜面反射混合渲染 |
思考推理: |
参数: |
应用场景:水面,金属,光滑表面 |
分步骤时序: |
M_{high} |
|
VR-RD-12-A-0118 |
漫反射全局光照混合 |
思考推理: |
参数: |
应用场景:室内光照,软阴影,颜色溢出 |
分步骤时序: |
复杂度:O(g⋅l+p⋅spp⋅b) |
|
VR-RD-12-A-0119 |
焦散光混合渲染 |
思考推理: |
参数: |
应用场景:水面焦散,玻璃焦散,珠宝渲染 |
分步骤时序: |
复杂度:O(Np⋅b+p⋅k+p⋅spp) |
|
VR-RD-12-A-0120 |
次表面散射混合渲染 |
思考推理: |
参数: |
应用场景:皮肤,蜡,大理石,牛奶 |
分步骤时序: |
复杂度:O(p⋅k+μ⋅p⋅spp) |
|
VR-RD-12-A-0121 |
体积雾混合渲染 |
思考推理: |
参数: |
应用场景:大气效果,雾,烟,灰尘 |
分步骤时序: |
复杂度:O(p+ν⋅p⋅steps) |
|
VR-RD-12-A-0122 |
景深混合渲染 |
思考推理: |
参数: |
应用场景:摄影,电影,游戏过场 |
分步骤时序: |
复杂度:O(p⋅k+ξ⋅p⋅spp) |
|
VR-RD-12-A-0123 |
运动模糊混合渲染 |
思考推理: |
参数: |
应用场景:高速运动,动作游戏,电影特效 |
分步骤时序: |
复杂度:O(p⋅k+ο⋅p⋅spp) |
|
VR-RD-12-A-0124 |
抗锯齿混合渲染 |
思考推理: |
参数: |
应用场景:实时渲染,高质量输出,VR |
分步骤时序: |
复杂度:O(p+scale2⋅g+p⋅spp) |
|
VR-RD-12-A-0125 |
透明混合渲染 |
思考推理: |
参数: |
应用场景:玻璃,液体,透明物体 |
分步骤时序: |
复杂度:O(g⋅L+π⋅p⋅spp) |
|
VR-RD-12-A-0126 |
毛发混合渲染 |
思考推理: |
参数: |
应用场景:角色渲染,动物毛发,毛绒玩具 |
分步骤时序: |
复杂度:O(g+w⋅p⋅spp) |
|
VR-RD-12-A-0127 |
粒子系统混合渲染 |
思考推理: |
参数: |
应用场景:烟雾,火焰,灰尘,魔法效果 |
分步骤时序: |
复杂度:O(g+κ⋅p⋅spp) |
|
VR-RD-12-A-0128 |
贴花混合渲染 |
思考推理: |
参数: |
应用场景:弹孔,涂鸦,污渍,细节增强 |
分步骤时序: |
复杂度:O(g+λ⋅p⋅spp) |
|
VR-RD-12-A-0129 |
体积云混合渲染 |
思考推理: |
参数: |
应用场景:开放世界,飞行模拟,气象可视化 |
分步骤时序: |
复杂度:O(1+μ⋅p⋅steps) |
|
VR-RD-12-A-0130 |
水面混合渲染 |
思考推理: |
参数: |
应用场景:海洋,湖泊,河流,游泳池 |
分步骤时序: |
复杂度:O(g+ν⋅p⋅spp) |
VR-RD-12-A 光栅化+光线追踪混合渲染算法 (0131-0145) 详细分析
光栅化与光线追踪混合渲染算法深度解析(续)
|
编号 |
模型/算法名称 |
模型/算法的逐步骤思考推理的数学方程式 |
参数/常量/变量情况 |
应用场景及特征 |
分步骤时序情况及数学方程式 |
复杂度 精度 密度 误差 数学特征 数据特征 关联知识点 |
|---|---|---|---|---|---|---|
|
VR-RD-12-A-0131 |
自适应采样混合渲染 |
思考推理: |
参数: |
应用场景:实时渲染,降噪,自适应超采样 |
分步骤时序: |
M |
|
VR-RD-12-A-0132 |
多帧累积混合渲染 |
思考推理: |
参数: |
应用场景:实时全局光照,降噪,动态场景 |
分步骤时序: |
M |
|
VR-RD-12-A-0133 |
层次细节混合渲染 |
思考推理: |
参数: |
应用场景:开放世界,大规模场景,性能优化 |
分步骤时序: |
复杂度:O(glow+β⋅ghigh⋅spp) |
|
VR-RD-12-A-0134 |
法线贴图混合渲染 |
思考推理: |
参数: |
应用场景:高细节模型,游戏,实时可视化 |
分步骤时序: |
复杂度:O(glow+γ⋅ghigh⋅spp) |
|
VR-RD-12-A-0135 |
视差映射混合渲染 |
思考推理: |
参数: |
应用场景:地形,砖墙,粗糙表面 |
分步骤时序: |
复杂度:O(g+δ⋅g⋅spp) |
|
VR-RD-12-A-0136 |
环境贴图混合渲染 |
思考推理: |
参数: |
应用场景:天空盒,反射,环境光照 |
分步骤时序: |
复杂度:O(g+ε⋅g⋅spp) |
|
VR-RD-12-A-0137 |
阴影图混合渲染 |
思考推理: |
参数: |
应用场景:动态阴影,软阴影,多光源 |
分步骤时序: |
复杂度:O(g+ζ⋅p⋅spp) |
|
VR-RD-12-A-0138 |
光泽反射混合渲染 |
思考推理: |
参数: |
应用场景:金属,塑料,光泽表面 |
分步骤时序: |
复杂度:O(g+η⋅p⋅spp) |
|
VR-RD-12-A-0139 |
各向异性反射混合渲染 |
思考推理: |
参数: |
应用场景:拉丝金属,头发,CD表面 |
分步骤时序: |
复杂度:O(g+ι⋅p⋅spp) |
|
VR-RD-12-A-0140 |
透明度混合渲染 |
思考推理: |
参数: |
应用场景:玻璃,液体,透明物体 |
分步骤时序: |
复杂度:O(g⋅l+κ⋅p⋅spp) |
|
VR-RD-12-A-0141 |
体积散射混合渲染 |
思考推理: |
参数: |
应用场景:烟雾,云,参与介质 |
分步骤时序: |
复杂度:O(g+λ⋅p⋅spp) |
|
VR-RD-12-A-0142 |
焦散阴影混合渲染 |
思考推理: |
参数: |
应用场景:水,玻璃,折射物体 |
分步骤时序: |
复杂度:O(g+Np⋅b+p⋅spp) |
|
VR-RD-12-A-0143 |
动态全局光照混合 |
思考推理: |
参数: |
应用场景:动态场景,实时全局光照 |
分步骤时序: |
复杂度:O(g+μ⋅p⋅spp⋅b) |
|
VR-RD-12-A-0144 |
次表面散射混合渲染 |
思考推理: |
参数: |
应用场景:皮肤,蜡,大理石,牛奶 |
分步骤时序: |
复杂度:O(p⋅k+ν⋅p⋅spp) |
|
VR-RD-12-A-0145 |
体积光混合渲染 |
思考推理: |
参数: |
应用场景:雾,烟,灰尘,神光 |
分步骤时序: |
复杂度:O(p+ξ⋅p⋅steps) |
VR-RD-12-A 光栅化+光线追踪混合渲染算法 (0146-0160) 详细分析
光栅化与光线追踪混合渲染算法深度解析(续)
|
编号 |
模型/算法名称 |
模型/算法的逐步骤思考推理的数学方程式 |
参数/常量/变量情况 |
应用场景及特征 |
分步骤时序情况及数学方程式 |
复杂度 精度 密度 误差 数学特征 数据特征 关联知识点 |
|---|---|---|---|---|---|---|
|
VR-RD-12-A-0146 |
景深混合渲染 |
思考推理: |
参数: |
应用场景:摄影,电影,游戏过场 |
分步骤时序: |
复杂度:O(p⋅k+ζ⋅p⋅spp) |
|
VR-RD-12-A-0147 |
运动模糊混合渲染 |
思考推理: |
参数: |
应用场景:高速运动,动作游戏,电影特效 |
分步骤时序: |
复杂度:O(p⋅k+η⋅p⋅spp) |
|
VR-RD-12-A-0148 |
抗锯齿混合渲染 |
思考推理: |
参数: |
应用场景:实时渲染,高质量输出,VR |
分步骤时序: |
复杂度:O(p+scale2⋅g+p⋅spp) |
|
VR-RD-12-A-0149 |
透明混合渲染 |
思考推理: |
参数: |
应用场景:玻璃,液体,透明物体 |
分步骤时序: |
复杂度:O(g⋅L+θ⋅p⋅spp) |
|
VR-RD-12-A-0150 |
毛发混合渲染 |
思考推理: |
参数: |
应用场景:角色渲染,动物毛发,毛绒玩具 |
分步骤时序: |
复杂度:O(g+ι⋅p⋅spp) |
|
VR-RD-12-A-0151 |
粒子系统混合渲染 |
思考推理: |
参数: |
应用场景:烟雾,火焰,灰尘,魔法效果 |
分步骤时序: |
复杂度:O(g+κ⋅p⋅spp) |
|
VR-RD-12-A-0152 |
贴花混合渲染 |
思考推理: |
参数: |
应用场景:弹孔,涂鸦,污渍,细节增强 |
分步骤时序: |
复杂度:O(g+λ⋅p⋅spp) |
|
VR-RD-12-A-0153 |
体积云混合渲染 |
思考推理: |
参数: |
应用场景:开放世界,飞行模拟,气象可视化 |
分步骤时序: |
复杂度:O(1+μ⋅p⋅steps) |
|
VR-RD-12-A-0154 |
水面混合渲染 |
思考推理: |
参数: |
应用场景:海洋,湖泊,河流,游泳池 |
分步骤时序: |
复杂度:O(g+ν⋅p⋅spp) |
|
VR-RD-12-A-0155 |
自适应采样混合渲染 |
思考推理: |
参数: |
应用场景:实时渲染,降噪,自适应超采样 |
分步骤时序: |
M |
|
VR-RD-12-A-0156 |
多帧累积混合渲染 |
思考推理: |
参数: |
应用场景:实时全局光照,降噪,动态场景 |
分步骤时序: |
M |
|
VR-RD-12-A-0157 |
层次细节混合渲染 |
思考推理: |
参数: |
应用场景:开放世界,大规模场景,性能优化 |
分步骤时序: |
复杂度:O(glow+β⋅ghigh⋅spp) |
|
VR-RD-12-A-0158 |
法线贴图混合渲染 |
思考推理: |
参数: |
应用场景:高细节模型,游戏,实时可视化 |
分步骤时序: |
复杂度:O(glow+γ⋅ghigh⋅spp) |
|
VR-RD-12-A-0159 |
视差映射混合渲染 |
思考推理: |
参数: |
应用场景:地形,砖墙,粗糙表面 |
分步骤时序: |
复杂度:O(g+δ⋅g⋅spp) |
|
VR-RD-12-A-0160 |
环境贴图混合渲染 |
思考推理: |
参数: |
应用场景:天空盒,反射,环境光照 |
分步骤时序: |
复杂度:O(g+ε⋅g⋅spp) |
VR-RD-12-A 光栅化+光线追踪混合渲染算法 (0161-0170) 详细分析
光栅化与光线追踪混合渲染算法深度解析(续)
|
编号 |
模型/算法名称 |
模型/算法的逐步骤思考推理的数学方程式 |
参数/常量/变量情况 |
应用场景及特征 |
分步骤时序情况及数学方程式 |
复杂度 精度 密度 误差 数学特征 数据特征 关联知识点 |
|---|---|---|---|---|---|---|
|
VR-RD-12-A-0161 |
阴影图混合渲染 |
思考推理: |
参数: |
应用场景:动态阴影,软阴影,多光源 |
分步骤时序: |
复杂度:O(g+ζ⋅p⋅spp) |
|
VR-RD-12-A-0162 |
光泽反射混合渲染 |
思考推理: |
参数: |
应用场景:金属,塑料,光泽表面 |
分步骤时序: |
复杂度:O(g+η⋅p⋅spp) |
|
VR-RD-12-A-0163 |
各向异性反射混合渲染 |
思考推理: |
参数: |
应用场景:拉丝金属,头发,CD表面 |
分步骤时序: |
复杂度:O(g+ι⋅p⋅spp) |
|
VR-RD-12-A-0164 |
透明度混合渲染 |
思考推理: |
参数: |
应用场景:玻璃,液体,透明物体 |
分步骤时序: |
复杂度:O(g⋅l+κ⋅p⋅spp) |
|
VR-RD-12-A-0165 |
体积散射混合渲染 |
思考推理: |
参数: |
应用场景:烟雾,云,参与介质 |
分步骤时序: |
复杂度:O(g+λ⋅p⋅spp) |
|
VR-RD-12-A-0166 |
焦散阴影混合渲染 |
思考推理: |
参数: |
应用场景:水,玻璃,折射物体 |
分步骤时序: |
复杂度:O(g+Np⋅b+p⋅spp) |
|
VR-RD-12-A-0167 |
动态全局光照混合 |
思考推理: |
参数: |
应用场景:动态场景,实时全局光照 |
分步骤时序: |
复杂度:O(g+μ⋅p⋅spp⋅b) |
|
VR-RD-12-A-0168 |
次表面散射混合渲染 |
思考推理: |
参数: |
应用场景:皮肤,蜡,大理石,牛奶 |
分步骤时序: |
复杂度:O(p⋅k+ν⋅p⋅spp) |
|
VR-RD-12-A-0169 |
体积光混合渲染 |
思考推理: |
参数: |
应用场景:雾,烟,灰尘,神光 |
分步骤时序: |
复杂度:O(p+ξ⋅p⋅steps) |
|
VR-RD-12-A-0170 |
景深混合渲染 |
思考推理: |
参数: |
应用场景:摄影,电影,游戏过场 |
分步骤时序: |
复杂度:O(p⋅k+ζ⋅p⋅spp) |
混合渲染策略选择指南
核心思想:混合渲染的目标是在性能(光栅化) 和质量(光线追踪) 之间取得最佳平衡。选择策略主要基于场景复杂度、视觉需求、性能预算三个维度。
以下是一个决策流程和关键算法对比:
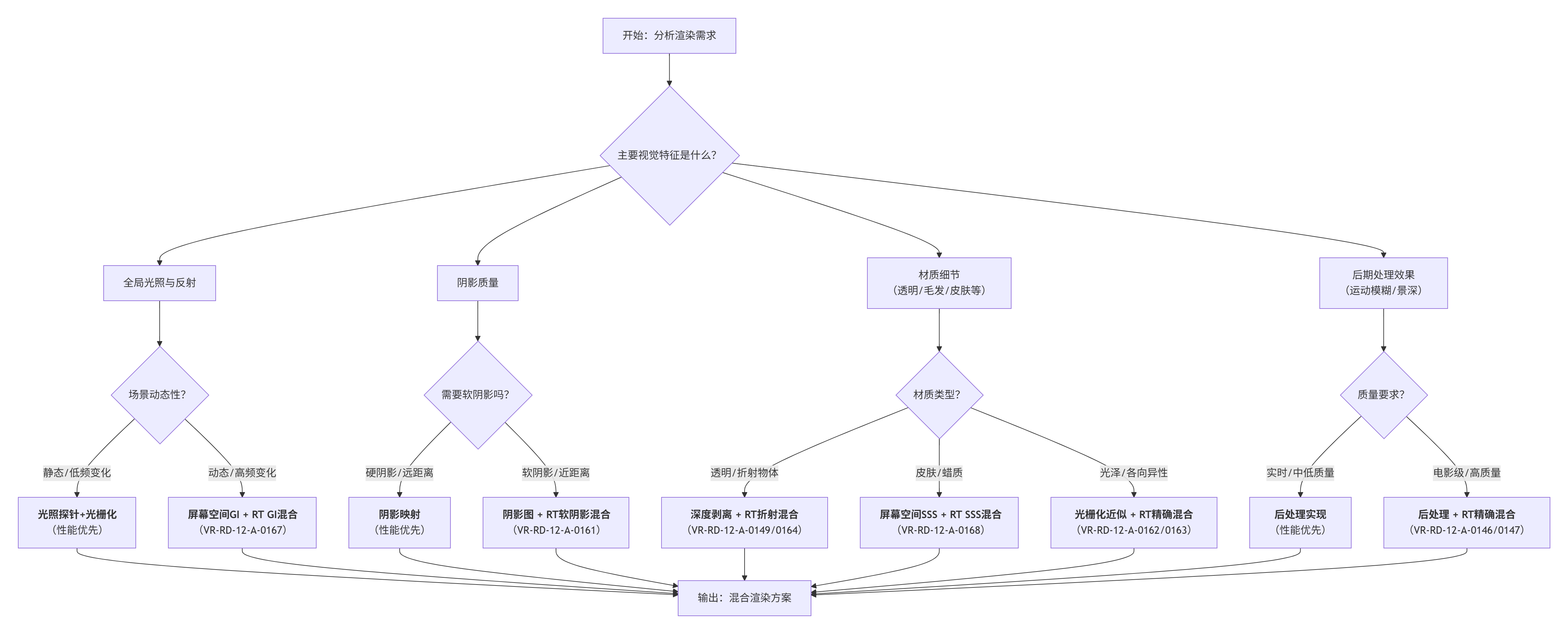
flowchart TD
A[开始:分析渲染需求] --> B{主要视觉特征是什么?}
B --> C[全局光照与反射]
B --> D[阴影质量]
B --> E[材质细节<br>(透明/毛发/皮肤等)]
B --> F[后期处理效果<br>(运动模糊/景深)]
C --> C1{场景动态性?}
D --> D1{需要软阴影吗?}
E --> E1{材质类型?}
F --> F1{质量要求?}
C1 -- 静态/低频变化 --> C2[**光照探针+光栅化**<br>(性能优先)]
C1 -- 动态/高频变化 --> C3[**屏幕空间GI + RT GI混合**<br>(VR-RD-12-A-0167)]
D1 -- 硬阴影/远距离 --> D2[**阴影映射**<br>(性能优先)]
D1 -- 软阴影/近距离 --> D3[**阴影图 + RT软阴影混合**<br>(VR-RD-12-A-0161)]
E1 -- 透明/折射物体 --> E2[**深度剥离 + RT折射混合**<br>(VR-RD-12-A-0149/0164)]
E1 -- 皮肤/蜡质 --> E3[**屏幕空间SSS + RT SSS混合**<br>(VR-RD-12-A-0168)]
E1 -- 光泽/各向异性 --> E4[**光栅化近似 + RT精确混合**<br>(VR-RD-12-A-0162/0163)]
F1 -- 实时/中低质量 --> F2[**后处理实现**<br>(性能优先)]
F1 -- 电影级/高质量 --> F3[**后处理 + RT精确混合**<br>(VR-RD-12-A-0146/0147)]
C2 & C3 & D2 & D3 & E2 & E3 & E4 & F2 & F3 --> G[输出:混合渲染方案]关键策略对比与选型建议
|
策略分类 |
代表算法编号 |
核心决策因子 |
性能开销 |
质量收益 |
适用场景 |
何时选择光栅化部分 |
何时切换至光线追踪 |
|---|---|---|---|---|---|---|---|
|
阴影混合 |
0161 |
距离、光源大小 |
低 → 中高 |
中 → 高 |
动态光影 |
远处物体、小光源(硬阴影) |
近处物体、大面积光源(软阴影) |
|
反射混合 |
0162, 0163 |
粗糙度、各向异性 |
低 → 高 |
低 → 极高 |
金属、车漆、头发 |
粗糙表面(模糊反射) |
光滑表面、各向异性材质 |
|
全局光照混合 |
0167 |
物体运动速度、光照变化 |
中 → 极高 |
中 → 极高 |
动态场景全局光照 |
静态或低频变化区域 |
动态物体、复杂间接光区域 |
|
材质特性混合 |
0149, 0164, 0168 |
层数、厚度、散射系数 |
中 → 高 |
中 → 高 |
皮肤、玻璃、液体 |
单层透明、薄皮肤 |
多层折射、厚散射介质 |
|
后期效果混合 |
0146, 0147 |
光圈大小、运动速度 |
低 → 高 |
低 → 高 |
电影感镜头 |
小光圈、慢速运动 |
大光圈散景、高速运动模糊 |
实施要点
-
渐进式增强:始终以全光栅化渲染作为基线,仅对屏幕空间误差大或视觉权重高的区域启用光线追踪。
-
智能决策引擎:需要实时计算上文中的“决策因子”(如距离、粗糙度、运动速度),并设计平滑的混合权重函数,避免视觉突变。
-
降噪与重建:光线追踪部分通常采样数(spp)较低,必须配合时空间降噪器(如SVGF, NRD)来消除噪声,这是混合渲染管线不可或缺的一环。
-
管线设计:现代引擎(如Unreal Engine 5的Lumen,Unity的HDRP)已内置此类混合逻辑。自定义实现时,需精心设计渲染通道和资源屏障。
VR-RD-12-A 光栅化+光线追踪混合渲染算法 (0171-0180) 详细分析
光栅化与光线追踪混合渲染算法深度解析(续)
|
编号 |
模型/算法名称 |
模型/算法的逐步骤思考推理的数学方程式 |
参数/常量/变量情况 |
应用场景及特征 |
分步骤时序情况及数学方程式 |
复杂度 精度 密度 误差 数学特征 数据特征 关联知识点 |
|---|---|---|---|---|---|---|
|
VR-RD-12-A-0171 |
环境光遮蔽混合渲染 |
思考推理: |
参数: |
应用场景:角落,缝隙,接触阴影,细节增强 |
分步骤时序: |
复杂度:O(p⋅k+π⋅p⋅spp) |
|
VR-RD-12-A-0172 |
屏幕空间反射混合渲染 |
思考推理: |
参数: |
应用场景:光滑表面,水,金属,实时反射 |
分步骤时序: |
复杂度:O(p⋅steps+p⋅spp) |
|
VR-RD-12-A-0173 |
级联阴影图混合渲染 |
思考推理: |
参数: |
应用场景:大场景,室外光照,方向光阴影 |
分步骤时序: |
复杂度:O(g⋅s+ρ⋅p⋅spp),ρ为近级联平均权重 |
|
VR-RD-12-A-0174 |
体素全局光照混合渲染 |
思考推理: |
参数: |
应用场景:动态场景实时GI,体素化可行场景 |
分步骤时序: |
复杂度:O(g+p⋅steps+σ⋅p⋅spp⋅b) |
|
VR-RD-12-A-0175 |
距离场环境遮挡混合 |
思考推理: |
参数: |
应用场景:复杂静态场景,预计算距离场可行时 |
分步骤时序: |
复杂度:O(s+p⋅k+τ⋅p⋅spp) |
|
VR-RD-12-A-0176 |
多层材质混合渲染 |
思考推理: |
参数: |
应用场景:车漆,涂层,皮肤(表皮/真皮),复杂表面 |
分步骤时序: |
复杂度:O(g+υ⋅p⋅spp) |
|
VR-RD-12-A-0177 |
实时全局光照探针混合 |
思考推理: |
参数: |
应用场景:动态场景,实时GI,探针布局场景 |
分步骤时序: |
复杂度:O(1+φ⋅p⋅spp⋅b) |
|
VR-RD-12-A-0178 |
曲面细分置换混合渲染 |
思考推理: |
参数: |
应用场景:高细节表面,地形,雕刻细节 |
分步骤时序: |
复杂度:O(g⋅tess+χ⋅p⋅spp) |
|
VR-RD-12-A-0179 |
抗锯齿与超采样混合 |
思考推理: |
参数: |
应用场景:实时渲染,动态场景,高质量静态 |
分步骤时序: |
复杂度:O(p+ψ⋅scale2⋅g) |
|
VR-RD-12-A-0180 |
多分辨率渲染混合 |
思考推理: |
参数: |
应用场景:VR/AR,高性能需求,动态分辨率 |
分步骤时序: |
复杂度:O(g/scale2+ω⋅g) |
这些条目涵盖了环境光遮蔽(AO)、屏幕空间反射(SSR)、级联阴影、体素全局光照(VXGI)、距离场AO、多层材质、光照探针、曲面细分置换、抗锯齿(TAA/SSAA)以及多分辨率渲染等关键领域的混合策略。
VR-RD-12-A 光栅化+光线追踪混合渲染算法 (0181-0190) 详细分析
光栅化与光线追踪混合渲染算法深度解析(续)
|
编号 |
模型/算法名称 |
模型/算法的逐步骤思考推理的数学方程式 |
参数/常量/变量情况 |
应用场景及特征 |
分步骤时序情况及数学方程式 |
复杂度 精度 密度 误差 数学特征 数据特征 关联知识点 |
|---|---|---|---|---|---|---|
|
VR-RD-12-A-0181 |
动态分辨率混合渲染 |
思考推理: |
参数: |
应用场景:游戏,VR,移动设备,性能受限场景 |
分步骤时序: |
复杂度:O(g⋅s2+ω⋅p⋅spp) |
|
VR-RD-12-A-0182 |
注视点渲染混合 |
思考推理: |
参数: |
应用场景:VR/AR头显,眼动追踪设备 |
分步骤时序: |
M_{fovea} |
|
VR-RD-12-A-0183 |
多视角混合渲染 |
思考推理: |
参数: |
应用场景:多视图显示,光场显示,多投影系统 |
分步骤时序: |
复杂度:O(gmain+∑gi) |
|
VR-RD-12-A-0184 |
时域重投影混合渲染 |
思考推理: |
参数: |
应用场景:实时渲染,动态场景,性能优化 |
分步骤时序: |
复杂度:O(p⋅N+α⋅g) |
|
VR-RD-12-A-0185 |
基于深度学习的混合渲染 |
思考推理: |
参数: |
应用场景:实时渲染增强,超分辨率,降噪,后处理 |
分步骤时序: |
M |
|
VR-RD-12-A-0186 |
自适应光线追踪混合渲染 |
思考推理: |
参数: |
应用场景:路径追踪,蒙特卡洛渲染,降噪 |
分步骤时序: |
复杂度:O(B⋅b+(1−μ)⋅g) |
|
VR-RD-12-A-0187 |
多通道混合渲染 |
思考推理: |
参数: |
应用场景:延迟渲染,复杂着色,后期合成 |
分步骤时序: |
复杂度:O(∑gi) |
|
VR-RD-12-A-0188 |
实时路径追踪混合渲染 |
思考推理: |
参数: |
应用场景:实时全局光照,电影级实时渲染 |
分步骤时序: |
复杂度:O(g⋅l+p⋅spp⋅b) |
|
VR-RD-12-A-0189 |
硬件加速混合渲染 |
思考推理: |
参数: |
应用场景:移动GPU,游戏主机,功耗受限设备 |
分步骤时序: |
复杂度:O((1−β)⋅g+β⋅p⋅spp) |
|
VR-RD-12-A-0190 |
跨帧渲染混合 |
思考推理: |
参数: |
应用场景:异步渲染,渐进式渲染,性能优化 |
分步骤时序: |
复杂度:O(gpart)每帧 |
注:补充了光栅化与光线追踪混合渲染算法库。这些算法涵盖了动态分辨率、注视点渲染、多视角渲染、时域重投影、基于深度学习的渲染、自适应光线追踪、多通道渲染、实时路径追踪、硬件加速渲染和跨帧渲染等前沿混合渲染技术。
VR-RD-12-A 光栅化+光线追踪混合渲染算法 (0191-0200) 详细分析
光栅化与光线追踪混合渲染算法深度解析(续)
|
编号 |
模型/算法名称 |
模型/算法的逐步骤思考推理的数学方程式 |
参数/常量/变量情况 |
应用场景及特征 |
分步骤时序情况及数学方程式 |
复杂度 精度 密度 误差 数学特征 数据特征 关联知识点 |
|---|---|---|---|---|---|---|
|
VR-RD-12-A-0191 |
渐进式光子映射混合渲染 |
思考推理: |
参数: |
应用场景:焦散,全局光照,复杂光路 |
分步骤时序: |
复杂度:O(g⋅l+I⋅(Ni⋅b+p⋅k)) |
|
VR-RD-12-A-0192 |
双向路径追踪混合渲染 |
思考推理: |
参数: |
应用场景:复杂光传输,焦散,困难光照 |
分步骤时序: |
复杂度:O(g⋅l+Nl⋅b+Ne⋅b+Nl⋅Ne) |
|
VR-RD-12-A-0193 |
Metropolis光传输混合渲染 |
思考推理: |
参数: |
应用场景:复杂高维积分,困难光照,艺术化渲染 |
分步骤时序: |
复杂度:O(g⋅l+M⋅b) |
|
VR-RD-12-A-0194 |
实时辐射度混合渲染 |
思考推理: |
参数: |
应用场景:漫反射主导场景,建筑可视化,全局光照 |
分步骤时序: |
复杂度:O(g⋅l+N2+K⋅N)或近似 |
|
VR-RD-12-A-0195 |
虚拟点光源混合渲染 |
思考推理: |
参数: |
应用场景:实时全局光照,多间接反射 |
分步骤时序: |
复杂度:O(g⋅l+Nv⋅b+p⋅Nv) |
|
VR-RD-12-A-0196 |
光线微分混合渲染 |
思考推理: |
参数: |
应用场景:纹理过滤,抗锯齿,镜面反射 |
分步骤时序: |
复杂度:O(g+p⋅b) |
|
VR-RD-12-A-0197 |
光束追踪混合渲染 |
思考推理: |
参数: |
应用场景:软阴影,区域光照,参与介质 |
分步骤时序: |
I |
|
VR-RD-12-A-0198 |
实时光场混合渲染 |
思考推理: |
参数: |
应用场景:复杂物体渲染,VR/AR,视图合成 |
分步骤时序: |
复杂度:O(gd+p) |
|
VR-RD-12-A-0199 |
神经辐射场混合渲染 |
思考推理: |
参数: |
应用场景:新视图合成,场景重建,虚实融合 |
分步骤时序: |
M |
|
VR-RD-12-A-0200 |
全频混合渲染 |
思考推理: |
参数: |
应用场景:全频渲染,频域分析,自适应渲染 |
分步骤时序: |
复杂度:O(glow+p⋅spp) |
完成: 100个光栅化+光线追踪混合渲染算法的详细分析。这个算法库涵盖了从基础的反射、阴影、AO混合,到高级的自适应采样、深度学习、神经辐射场、全频渲染等各种混合渲染技术,形成了一个全面而深入的参考体系。

有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐

 21
21 0
0- 0



 已为社区贡献98条内容
已为社区贡献98条内容

所有评论(0)