【信号与系统学习笔记】—— 一起走进“卷积”的世界 2【系统基本性质和卷积的关系】
文章目录一、卷积计算的基本性质二、系统基本性质和卷积的关系2.1 记忆性和卷积2.2一、卷积计算的基本性质二、系统基本性质和卷积的关系2.1 记忆性和卷积还记得无记忆系统的定义吗:无记忆系统,就是指系统在某一时刻 ttt 的输出,仅仅取决于该 ttt 时刻的输入,与其他时刻的输入无关。2.2...
文章目录
一、卷积计算的基本性质
下面所介绍的几种计算性质,不管是对离散时间还是连续时间都是成立的。
- 交换律,即: x ∗ h = h ∗ x x*h = h*x x∗h=h∗x
- 结合律,即: x ∗ h 1 ∗ h 2 = ( x ∗ h 1 ) ∗ h 2 = x ∗ ( h 1 ∗ h 2 ) x*h_1*h_2 = (x*h_1)*h_2 = x*(h_1*h_2) x∗h1∗h2=(x∗h1)∗h2=x∗(h1∗h2)
- 分配律,即: x ∗ ( h 1 + h 2 ) = x ∗ h 1 + x ∗ h 2 x*(h_1+h_2) = x*h_1 + x*h_2 x∗(h1+h2)=x∗h1+x∗h2
另外,卷积还满足一些其他的性质:、
【1】时移性: x [ n − n 0 ] ∗ h [ n ] = h [ n − n 0 ] ∗ x [ n ] = y [ n − n 0 ] x[n-n_0]*h[n] = h[n-n_0]*x[n] = y[n-n_0] x[n−n0]∗h[n]=h[n−n0]∗x[n]=y[n−n0](同理对于连续时间系统也是成立的)
其实,从式子 x [ n − n 0 ] ∗ h [ n ] = y [ n − n 0 ] x[n-n_0]*h[n] = y[n-n_0] x[n−n0]∗h[n]=y[n−n0] 大家是可以理解的,这就是线性时不变系统的特点。但是,对于: x [ n − n 0 ] ∗ h [ n ] = h [ n − n 0 ] ∗ x [ n ] x[n-n_0]*h[n] = h[n-n_0]*x[n] x[n−n0]∗h[n]=h[n−n0]∗x[n] 应该如何理解呢?这里也用上了卷积的交换律,我们就可以把 h [ n ] h[n] h[n] 当作输入信号,自然,输入信号产生的 n − n 0 n-n_0 n−n0 的时移,反映在输出也会是 n − n 0 n-n_0 n−n0 的时移。
【2】卷积还满足微分特性和积分特性:
微分特性: x ′ ∗ h = h ′ ∗ x = y ′ x'*h = h'*x = y' x′∗h=h′∗x=y′;
积分特性(对于连续时间信号): [ ∫ − ∞ t x ( τ ) d τ ] ∗ h ( t ) = x ( t ) ∗ [ ∫ − ∞ t h ( τ ) d τ ] = ∫ − ∞ t y ( τ ) d τ [\int_{-∞}^{t}x(τ)dτ]*h(t) = x(t)*[\int_{-∞}^{t}h(τ)dτ] = \int_{-∞}^{t}y(τ)dτ [∫−∞tx(τ)dτ]∗h(t)=x(t)∗[∫−∞th(τ)dτ]=∫−∞ty(τ)dτ
二、由卷积计算的基本性质探索LTI系统结构的特点
【1】我们从交换律看看能够推出系统的哪些性质:
我们先看一个简单系统框图:

结果里面, y = x ∗ h y = x*h y=x∗h,这样的顺序表示输入是 x x x,脉冲响应是 h h h。由交换律可知: y = h ∗ x y = h*x y=h∗x,这表示输入是 h h h,脉冲响应是 x x x,那么系统框图又可以改写成:

这说明:对于线性时不变系统而言,把哪个函数作为输入,把哪个函数作为脉冲响应并不会影响到最终的输出结果。
【2】下面我们来看一个级联系统由交换律和结合律的推导:

由交换律可知: y = x ∗ h 2 ∗ h 1 y = x*h_2*h_1 y=x∗h2∗h1,也就是说原系统也可以写成脉冲响应为 h 2 h_2 h2 的系统和脉冲响应为 h 1 h_1 h1 的系统级联,如下图:

由结合律可知: y = x ∗ ( h 1 ∗ h 2 ) y = x*(h_1*h_2) y=x∗(h1∗h2),因此,系统又相当于 x x x 输入进一个脉冲响应为 h 1 ∗ h 2 h_1*h_2 h1∗h2 的系统

也就是说,对于级联的线性时不变系统,不在乎级联的顺序,同时我们也可以把级联系统化简为一个系统。(注意,一定要是线性!时不变!)
【3】我们再看看分配律能推导出的结论:
先看看一个并联系统:
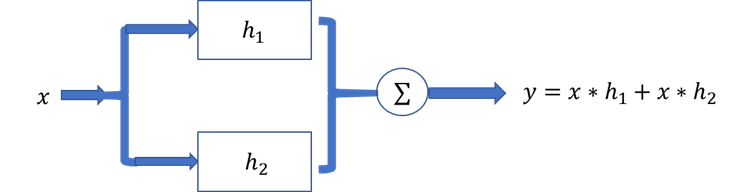
由分配律可知: y = x ∗ h 1 + x ∗ h 2 = x ∗ ( h 1 + h 2 ) y = x*h_1 +x*h_2 = x*(h_1+h_2) y=x∗h1+x∗h2=x∗(h1+h2),因此原系统又可以改成:

三、系统基本性质和卷积的关系
2.1 记忆性和卷积
还记得无记忆系统的定义吗:无记忆系统,就是指系统在某一时刻 t t t 的输出,仅仅取决于该 t t t 时刻的输入,与其他时刻的输入无关。

上图所示表示了一个 x ( τ ) x(τ) x(τ) 和其对应系统的脉冲响应 h ( t − τ ) h(t-τ) h(t−τ)。回顾卷积积分的公式: y ( t ) = ∫ − ∞ + ∞ x ( τ ) h ( t − τ ) d τ y(t) = \int_{-∞}^{+∞}x(τ)h(t-τ)dτ y(t)=∫−∞+∞x(τ)h(t−τ)dτ
计算的目的就是在 τ = t τ = t τ=t 的地方将 x ( τ ) x(τ) x(τ) 与 h ( t − τ ) h(t-τ) h(t−τ) 相乘,然后对 τ τ τ 在整个时间轴上积分。
那么,如果我们想让系统在某一时刻 τ = t τ = t τ=t 的输出仅仅只与该时刻有关,从图中我们也可以想到:就是要让 h ( t − τ ) h(t-τ) h(t−τ) 在 τ = t τ = t τ=t 时不为0,其他时刻均为0。能做到这一点的,只有单位冲激函数。
也即是说如果我们的系统是无记忆系统,那么这个系统的脉冲函数就应该是: h [ n ] = K δ [ n ] h[n] = Kδ[n] h[n]=Kδ[n](对于离散时间系统)或者是: h ( t ) = K δ ( t ) h(t) = Kδ(t) h(t)=Kδ(t)(对于连续时间系统)
换句话说:如果脉冲响应是冲激函数,那么一般要求我们的系统具有无记忆性。其他的脉冲函数 h h h,一般都要求系统具有记忆性。
2.2 可逆性与卷积
什么是可逆性的定义?即: x x x 输入进一个脉冲响应为 h h h 的系统,如果再经过一个脉冲响应为 h − 1 h^{-1} h−1 的系统,输出就是 x x x 本身,且系统的这个逆系统 h − 1 h^{-1} h−1 是唯一的时候,才叫做是系统的可逆性。

那么,从上图我们发现,系统输出为: x ∗ h ∗ h − 1 x*h*h^{-1} x∗h∗h−1
为了使得这个系统的输出等于输入,由卷积计算的结合律我们知道: y = x ∗ ( h ∗ h − 1 ) = x y = x*(h*h^{-1}) = x y=x∗(h∗h−1)=x
那么,就应该让: h ∗ h − 1 = δ h*h^{-1} = δ h∗h−1=δ,这对于离散时间或连续时间都是成立的!
【抛出一个问题】:如何证明 如果 h − 1 h^{-1} h−1 是 h h h 的逆,那么 h h h 也是 h − 1 h^{-1} h−1 的逆?
这似乎是一个线性代数证明题,但是我们可以用信号与系统的角度分析:
看看上面的流程图,我们最终得到的 o u t p u t output output 是: x ∗ h ∗ h − 1 x*h*h^{-1} x∗h∗h−1,由卷积的交换律可知:输出也等于 x ∗ h − 1 ∗ h x*h^{-1}*h x∗h−1∗h,那么我们就可以把框图改成:

那么,对于这个框图,我们的描述就是 h h h 是 h − 1 h^{-1} h−1 的逆。
2.3 稳定性与卷积
我们对系统稳定性的简单表述是:对于一个稳定的系统,一个有界的输入必然对应于一个有界的输出
下面我们看看卷积核稳定性有什么关系:
对于一个线性时不变系统,我们假设它的输入: ∣ x [ n ] ∣ < B |x[n]| < B ∣x[n]∣<B
那么它的输出应该表示为: ∣ y [ n ] ∣ = ∣ ∑ k = − ∞ + ∞ x [ k ] h [ n − k ] ∣ = ∣ x ∗ h ∣ |y[n]| = |\sum_{k=-∞}^{+∞}x[k]h[n-k]| = |x *h| ∣y[n]∣=∣k=−∞∑+∞x[k]h[n−k]∣=∣x∗h∣
由卷积计算的交换律,我们又可以表述成: ∣ y [ n ] ∣ = ∣ h ∗ x ∣ = ∣ ∑ k = − ∞ + ∞ h [ k ] x [ n − k ] ∣ |y[n]| = |h*x| = |\sum_{k=-∞}^{+∞}h[k]x[n-k]| ∣y[n]∣=∣h∗x∣=∣k=−∞∑+∞h[k]x[n−k]∣
我们又知道:乘积的绝对值小于等于绝对值的乘积,因此,又有: ∣ y [ n ] ∣ ≤ ∑ k = − ∞ + ∞ ∣ h [ k ] ∣ ∣ x [ n − k ] ∣ ≤ B ∑ k = − ∞ + ∞ ∣ h [ k ] ∣ |y[n]| ≤ \sum_{k=-∞}^{+∞}|h[k]||x[n-k]| ≤ B\sum_{k=-∞}^{+∞}|h[k]| ∣y[n]∣≤k=−∞∑+∞∣h[k]∣∣x[n−k]∣≤Bk=−∞∑+∞∣h[k]∣
因此,对于一个稳定的系统,又要求输出也有界,因此,我们得到: ∑ k = − ∞ + ∞ ∣ h [ k ] ∣ < ∞ \sum_{k=-∞}^{+∞}|h[k]| < ∞ k=−∞∑+∞∣h[k]∣<∞
即离散时间下,稳定系统的脉冲函数一定可和(求和结果有界)
连续时间下稳定系统的脉冲函数也应保持这样的关系: ∫ − ∞ + ∞ ∣ h ( τ ) ∣ d τ < ∞ \int_{-∞}^{+∞}|h(τ)|dτ < ∞ ∫−∞+∞∣h(τ)∣dτ<∞
即脉冲函数一定可积(积分结果有界)
2.4 因果性与卷积
系统的因果性可以表述为:系统无法预期到后来的输入是什么。
下面我们来推导一下系统具有因果性时,脉冲函数应该具有怎么样的性质:
对于一个线性系统,我们知道: x x x 的输入将会对应 y y y 的输出,那么, a x ax ax 就会对应 a y ay ay 输出。
当这个系数 a a a = 0 时,我们得出一个线性系统特有的属性:0输入,0输出。
即:如果在 t < t 0 t < t_0 t<t0 时,输入 x ( t ) = 0 x(t) = 0 x(t)=0,那么在 t < t 0 t < t_0 t<t0 时,输出 y ( t ) y(t) y(t) 也等于0
这就要求系统的脉冲函数应该满足下面的条件:
在 t < 0 t < 0 t<0 时, h ( t ) = 0 h(t) = 0 h(t)=0;或者是在 n < 0 n < 0 n<0 时, h [ n ] = 0 h[n] = 0 h[n]=0
如果上面的文字表述不够明白,我们下面进一步解释一下:我们原本卷积和或者卷积积分的定义式是这样的: y [ n ] = ∑ k = − ∞ + ∞ x [ k ] h [ n − k ] y ( t ) = ∫ − ∞ + ∞ x ( τ ) h ( t − τ ) d τ y[n] = \sum_{k = -∞}^{+∞}x[k]h[n-k]\\ \space\\ y(t) = \int_{-∞}^{+∞}x(τ)h(t -τ)dτ y[n]=k=−∞∑+∞x[k]h[n−k] y(t)=∫−∞+∞x(τ)h(t−τ)dτ
而我们说 “因果性” 的定义是系统无法预测未来,或者说系统在当前时刻的 t t t 的输出仅仅与该时刻 t t t 或者是 该时刻以前的时刻有关。为了满足这个定义,我们就需要让当 k > n k>n k>n 时: h [ n − k ] = 0 h[n-k] = 0 h[n−k]=0
我们做一下变量代换,令 n = n − k n = n-k n=n−k,那么上面式子的意思就是当 n < 0 n < 0 n<0 时, h [ n ] = 0 h[n] = 0 h[n]=0。这样,我们就得到了一个因果系统,它的脉冲响应的要求: h [ n ] = 0 i f n < 0 (1) h[n] = 0\quad if\space n < 0\tag{1} h[n]=0if n<0(1)
(1)式是系统具有因果性的充分必要条件!
那么,进一步讲,如果系统具有因果性,卷积和或卷积积分就可以这样表述: y [ n ] = ∑ k = − ∞ n x [ k ] h [ n − k ] y ( t ) = ∫ − ∞ t x ( τ ) h ( t − τ ) d τ y[n] = \sum_{k = -∞}^{n}x[k]h[n-k]\\ \space\\ y(t) = \int_{-∞}^tx(τ)h(t -τ)dτ y[n]=k=−∞∑nx[k]h[n−k] y(t)=∫−∞tx(τ)h(t−τ)dτ
2.5 归纳与实例
至此,应该说我们可以通过系统的不同特征来了解系统的脉冲响应应该满足什么特点,同时也能够根据系统的脉冲响应来推测系统具有什么特点。下面笔者把脉冲响应条件和对应的系统特点列一个表归纳一下:
\space
\space
| 系统特点 | 对应脉冲响应的约束条件 |
|---|---|
| 记忆性 | 不具有记忆性: h ( t ) = K δ ( t ) h(t) =Kδ(t) h(t)=Kδ(t); h [ n ] = K δ [ n ] h[n] = Kδ[n] h[n]=Kδ[n] |
| 可逆性 | 能够找出唯一的 h − 1 h^{-1} h−1 |
| 稳定性 | ∑ k = − ∞ + ∞ ∣ h [ k ] ∣ < ∞ \sum_{k=-∞}^{+∞}\vert h[k]\vert < ∞ ∑k=−∞+∞∣h[k]∣<∞; ∫ − ∞ + ∞ ∣ h ( τ ) ∣ d τ < ∞ \int_{-∞}^{+∞}\vert h(τ)\vert dτ < ∞ ∫−∞+∞∣h(τ)∣dτ<∞ |
| 因果性 | t < 0 t<0 t<0 时 h ( t ) = 0 h(t) = 0 h(t)=0; n < 0 n < 0 n<0 时 h [ n ] = 0 h[n] = 0 h[n]=0 |
下面以一个累加器系统为例:
累加器的输出可以写成: y [ n ] = ∑ k = − ∞ n x [ k ] y[n] = \sum_{k=-∞}^nx[k] y[n]=k=−∞∑nx[k]
实际上,累加器的脉冲响应是: h [ n ] = u [ n ] h[n] = u[n] h[n]=u[n] 即一个单位阶跃函数。
下面我们通过这个脉冲函数,来推断累加器系统的性质:
- u [ n ] ≠ K δ [ n ] u[n] ≠ Kδ[n] u[n]=Kδ[n],因此系统具有记忆性。
- 在 n < 0 n < 0 n<0 时,有: u [ n ] = 0 u[n] = 0 u[n]=0,因此系统具有因果性
- ∑ k = − ∞ + ∞ ∣ h [ k ] ∣ = ∞ \sum_{k=-∞}^{+∞}\vert h[k]\vert = ∞ ∑k=−∞+∞∣h[k]∣=∞ ,因此系统不稳定
- 关于系统是否可逆,我们下面来看看:
假设累加器系统具有可逆性,那么它应该满足下面的框图:

我们现在考虑上图中脉冲响应为 h − 1 h^{-1} h−1 的系统,我们知道: x 2 [ n ] ∗ h − 1 = y 2 [ n ] x_2[n]*h^{-1} = y_2[n] x2[n]∗h−1=y2[n]
由时不变系统特点我们又可以得到: x 2 [ n − 1 ] ∗ h − 1 = y 2 [ n − 1 ] x_2[n-1]*h^{-1} = y_2[n-1] x2[n−1]∗h−1=y2[n−1]
再由线性系统的特点和卷积计算的分配律我们知道: ( x 2 [ n ] − x 2 [ n − 1 ] ) ∗ h − 1 = y 2 [ n ] − y 2 [ n − 1 ] (x_2[n] - x_2[n-1])*h^{-1} = y_2[n] - y_2[n-1] (x2[n]−x2[n−1])∗h−1=y2[n]−y2[n−1]
而由于输入信号是: δ [ n ] δ[n] δ[n],经过第一个 h h h 系统的输出 x 2 [ n ] = u [ n ] x_2[n] = u[n] x2[n]=u[n],因此,有: ( u [ n ] − n [ n − 1 ] ) ∗ h − 1 = δ [ n ] − δ [ n − 1 ] (u[n] - n[n-1])*h^{-1} = δ[n] - δ[n-1] (u[n]−n[n−1])∗h−1=δ[n]−δ[n−1]
而由单位冲激信号的差分方程表示为: δ [ n ] = u [ n ] − u [ n − 1 ] δ[n] = u[n] - u[n-1] δ[n]=u[n]−u[n−1],因此,我们得出: δ [ n ] ∗ h − 1 = δ [ n ] − δ [ n − 1 ] δ[n]*h^{-1} = δ[n] - δ[n-1] δ[n]∗h−1=δ[n]−δ[n−1]
由于信号和单位冲激信号的卷积仍然是该信号自己,因此我们得到了: h − 1 = δ [ n ] − δ [ n − 1 ] h^{-1} = δ[n] - δ[n-1] h−1=δ[n]−δ[n−1]
证明累加器系统是可逆的!
四、关于脉冲函数的“操作性定义”
P r o f e s s o r O p p e n h e i m Professor \space Oppenheim Professor Oppenheim 在课提出的一个理解卷积的新观点。还记得我们当处在定义连续时间下的冲激函数时遇到的一点困难吗:我们想连续时间的冲激函数应该满足: δ ( t ) = d d t u ( t ) δ(t) = \frac{d}{dt}u(t) δ(t)=dtdu(t)
但是,连续时间下的单位阶跃函数在 t = 0 t = 0 t=0 处是间断的,也就是不可导。后来我们的想法是将 u ( t ) u(t) u(t) 在 t = 0 t=0 t=0 处的跳变放缓,也即是给它一个小的时间间隔 △ △ △,让 u ( t ) u(t) u(t) 在 △ △ △ 内才从0变到1,这样 u ( t ) u(t) u(t) 才可导,那么我们定义: δ △ ( t ) = d d t u △ ( t ) δ_△(t) = \frac{d}{dt}u_△(t) δ△(t)=dtdu△(t)
然后,我们就有: lim △ → 0 δ △ ( t ) = δ ( t ) \lim_{△\to 0}δ_△(t) = δ(t) △→0limδ△(t)=δ(t)
但是我们现在,打算从另一个角度定义这个冲激函数,即操作性定义不会对冲激函数在某一个时刻的值进行解释,而是解释冲激函数在卷积操作下的行为。
这部分的内容博主还要反复咀嚼一下 P r o f e s s o r O p p e n h e i m Professor \space Oppenheim Professor Oppenheim 的话,深入理解后再进行补充。
五、复习时的一些理解
我们下面要做的,是证明这样一个 Conlusion:
若 y ( t ) = x ( t ) ∗ h ( t ) y(t) = x(t) * h(t) y(t)=x(t)∗h(t),那么有: y ( − t ) = x ( − t ) ∗ h ( − t ) y(-t) = x(-t)*h(-t) y(−t)=x(−t)∗h(−t)
在证明之前,我们需要重新理解一下卷积公式里面的一些细节。还记得卷积积分吧: y ( t ) = ∫ − ∞ + ∞ x ( τ ) h ( t − τ ) d τ y(t) = \int_{-∞}^{+∞}x(τ)h(t-τ)dτ y(t)=∫−∞+∞x(τ)h(t−τ)dτ
我们当时做图解的时候,首先把 h ( t ) h(t) h(t)里面的 t t t 先用 τ τ τ 替换,变成 h ( τ ) h(τ) h(τ)。接下来反转,得到: h ( − τ ) h(-τ) h(−τ)。下面我们要做的就是从 − ∞ -∞ −∞开始把 h ( − τ ) h(-τ) h(−τ) 向右平移。
那么关于平移,有有话要说了,我们看看下面两种情况:
【1】对于自变量是 + t +t +t 的时候, x ( t − 1 ) x(t - 1) x(t−1) 意思就是向右平移 1 个单位。
【2】对于自变量是 − t -t −t 的时候, x ( − t + 1 ) x(-t + 1) x(−t+1) 就变成了向右平移 1 个单位。
所以,对于 h ( − τ ) h(-τ) h(−τ) 而言, h ( − τ + t ) = h ( t − τ ) h(-τ + t) = h(t - τ) h(−τ+t)=h(t−τ) 就是向右平移的意思,同理如果对于 h ( τ ) h(τ) h(τ) 而言, h ( τ − t ) h(τ - t) h(τ−t) 才表示向右平移。
好的,下面进入正题:我们先来求一下 x ( − t ) ∗ h ( − t ) x(-t)*h(-t) x(−t)∗h(−t):先把 x ( − t ) x(-t) x(−t) 变成 x ( − τ ) x(-τ) x(−τ)。接下来,处理 h ( − t ) h(-t) h(−t):
先把 h ( − t ) h(-t) h(−t) 的 t t t 用 τ τ τ 替换,变成 h ( − τ ) h(-τ) h(−τ)。接下来反转一下,变成: h ( τ ) h(τ) h(τ)。下面需要右移,那么刚刚说过的,对于 h ( τ ) h(τ) h(τ) 而言, h ( τ − t ) h(τ-t) h(τ−t) 才表示向右平移。因此,原始等于: x ( − t ) ∗ h ( − t ) = ∫ − ∞ + ∞ x ( − τ ) h ( τ − t ) d τ \begin{aligned} x(-t)*h(-t) &= \int_{-∞}^{+∞}x(-τ)h(τ-t)dτ\\ \end{aligned} x(−t)∗h(−t)=∫−∞+∞x(−τ)h(τ−t)dτ
下面,我们令 − τ = τ -τ = τ −τ=τ,原来 τ τ τ 的范围是 ( − ∞ , + ∞ ) (-∞, +∞) (−∞,+∞),那么现在的新自变量 − τ -τ −τ 的范围就是 ( + ∞ , − ∞ ) (+∞, -∞) (+∞,−∞)
x ( − t ) ∗ h ( − t ) = ∫ − ∞ + ∞ x ( − τ ) h ( τ − t ) d τ = ∫ + ∞ − ∞ x ( τ ) h ( − τ − t ) d ( − τ ) = ∫ − ∞ + ∞ x ( τ ) h ( − τ − t ) d τ \begin{aligned} x(-t)*h(-t) &= \int_{-∞}^{+∞}x(-τ)h(τ-t)dτ\\ &=\int_{+∞}^{-∞}x(τ)h(-τ-t)d(-τ)\\ &= \int_{-∞}^{+∞}x(τ)h(-τ-t)dτ\\ \end{aligned} x(−t)∗h(−t)=∫−∞+∞x(−τ)h(τ−t)dτ=∫+∞−∞x(τ)h(−τ−t)d(−τ)=∫−∞+∞x(τ)h(−τ−t)dτ
由于: y ( t ) = ∫ − ∞ + ∞ x ( τ ) h ( t − τ ) d τ y(t) = \int_{-∞}^{+∞}x(τ)h(t-τ)dτ y(t)=∫−∞+∞x(τ)h(t−τ)dτ
因此, y ( − t ) = ∫ − ∞ + ∞ x ( τ ) h ( − t − τ ) d τ = x ( − t ) ∗ h ( − t ) y(-t) = \int_{-∞}^{+∞}x(τ)h(-t-τ)dτ = x(-t) * h(-t) y(−t)=∫−∞+∞x(τ)h(−t−τ)dτ=x(−t)∗h(−t)
本题的难点在于如何正确地处理好右移的表达式。
好啦!这篇 B l o g Blog Blog 暂时写到这儿,本文主要讨论了卷积计算的一些性质,以及由这些性质能够推导处线性时不变系统结构的特点。我们还将线性时不变系统的基本性质和卷积,脉冲函数联系了起来。可能还会有关于 c o n v conv conv 的第三篇 B l o g Blog Blog,应该会写写卷积计算的实例以及 M a t l a b Matlab Matlab 的实现
六、参考资料
【1】《信号与系统(第二版)》奥本海姆
【2】【通信原理 入坑之路】——深入、详细地理解通信里面“卷积”概念
【3】知乎 —— 如何理解卷积
【4】《深入浅出通信原理》陈爱军

有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐


 10
10 0
0- 0



 已为社区贡献17条内容
已为社区贡献17条内容

所有评论(0)