PythonCV学习记录8——模板匹配
目录零之前言一.单匹配1.读入图片2.进行匹配3.读最大值坐标4.画框5.显示6.完整代码展示二.多匹配3.读取满足点坐标4.画框5.显示6.完整代码零之前言后面的学习还剩两大类:霍夫变换和图像特征的提取,都是一大章的,所以,只要本章独立了。一.单匹配模板匹配,只能匹配灰度图,对于其匹配方式,和 2D 卷积一样,它也是用模板图像在...
目录
零之前言
后面的学习还剩两大类:霍夫变换和图像特征的提取,都是一大章的,所以,只要本章独立了。
一.单匹配
模板匹配,只能匹配灰度图,对于其匹配方式,和 2D 卷积一样,它也是用模板图像在输入图像(大图)上滑动,并在每一个位置对模板图像和与其对应的输入图像的子区域进行比较。
其过程可以概括为:
1.读入图片
img = cv2.imread('test.jpg',0)
img2 = cv2.imread('test.jpg',1)
template = cv2.imread('face.jpg', 0)img被搜寻的图,template是寻找的图,img2是用于在其上面画线输出,这样显示的就是彩图了。当然也可以只读一次,然后转换成灰度图也行。
2.进行匹配
res = cv2.matchTemplate(img, template, cv2._TM_CCOEFF_NORMED)对于第三个参数,我们有很多种:
- 平方差匹配cv2._TM_SQDIFF:用两者的平方差来匹配,最好的匹配值为0
- 归一化平方差匹配cv2._TM_SQDIFF_NORMED
- 相关匹配cv2._TM_CCORR:用两者的乘积匹配,数值越大表明匹配程度越好
- 归一化相关匹配cv2._TM_CCORR_NORMED
- 相关系数匹配cv2._TM_CCOEFF:用两者的相关系数匹配,1表示完美的匹配,-1表示最差的匹配
- 归一化相关系数匹配cv2._TM_CCOEFF_NORMED
模板匹配也是应用卷积来实现的:假设原图大小为W×H,模板图大小为w×h,那么生成图大小是(W-w+1)×(H-h+1),生成图中的每个像素值表示原图与模板的匹配程度。即:在灰度图里,越白越好。
其最大值是筛选时的图片左上角的点
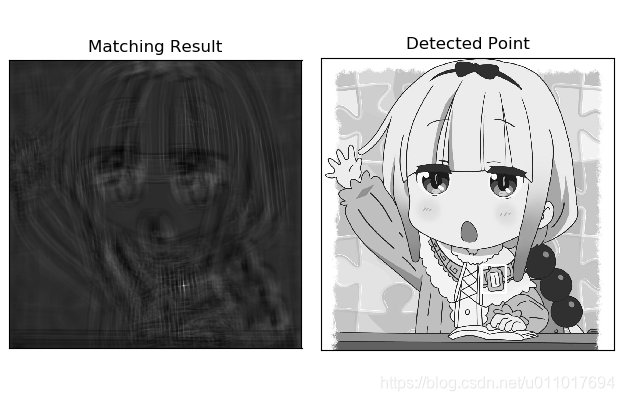
左图就是res的返回结果,可以明显看出,胸口是很亮的。
3.读最大值坐标
min_val, max_val, min_loc, max_loc = cv2.minMaxLoc(res)该函数返回4个值,最小值,最大值,及其坐标。
我们只要其最大值的坐标就行
4.画框
h, w = template.shape[:2] # rows->h, cols->w
left_top = max_loc # 左上角
right_bottom = (left_top[0] + w, left_top[1] + h) # 右下角
cv2.rectangle(img2, left_top, right_bottom, (255,255,0),5) # 画出矩形位置5.显示
cv2.rectangle(img2, left_top, right_bottom, (255,255,0),5) # 画出矩形位置
cv2.imshow('1',img2)
cv2.waitKey(0)6.完整代码展示
import cv2
img = cv2.imread('test.jpg',0)
img2 = cv2.imread('test.jpg',1)
template = cv2.imread('face.jpg', 0)
res = cv2.matchTemplate(img, template, cv2._TM_CCOEFF_NORMED)
min_val, max_val, min_loc, max_loc = cv2.minMaxLoc(res)
h, w = template.shape[:2] # rows->h, cols->w
left_top = max_loc # 左上角
right_bottom = (left_top[0] + w, left_top[1] + h) # 右下角
cv2.rectangle(img2, left_top, right_bottom, (255,255,0),5) # 画出矩形位置
cv2.imshow('1',img2)
cv2.waitKey(0)二.多匹配
1.2. 多匹配和单匹配差不多,只不过我们要遍历所有res中的点。
3.读取满足点坐标
threshold = 0.8
loc = np.where(res >= threshold) # 值大于0.8的坐标y,x
4.画框
for pt in zip(*loc[::-1]): # *号表示可选参数
right_bottom = (pt[0] + w, pt[1] + h)
cv2.rectangle(img_rgb, pt, right_bottom, (0, 0, 255), 2)对于zip函数的解释
x = [1, 2, 3]
y = [4, 5, 6]
print(list(zip(x, y))) # [(1, 4), (2, 5), (3, 6)]这样的解释的话,第三段代码就好理解了:因为loc是先y坐标再x坐标,所以用loc[::-1]翻转一下,然后再用zip函数拼接一下。
表示我还是没看懂,后面再看尝试,试出来把。
5.显示
懒得显了
6.完整代码
import cv2
import numpy as np
# 1. 读入原图和模板
img_rgb = cv2.imread('test.jpg')
img_gray = cv2.cvtColor(img_rgb, cv2.COLOR_BGR2GRAY)
template = cv2.imread('face.jpg', 0)
h, w = template.shape[:2]
# 归一化平方差匹配
res = cv2.matchTemplate(img_gray, template, cv2.TM_CCOEFF_NORMED)
threshold = 0.8
loc = np.where(res >= threshold) # 匹配程度大于80%的坐标y,x
print(loc)
for pt in zip(*loc[::-1]): # *号表示可选参数
right_bottom = (pt[0] + w, pt[1] + h)
cv2.rectangle(img_rgb, pt, right_bottom, (0, 0, 255), 2)
cv2.imshow('11',img_rgb)
cv2.waitKey(0)呐,差不多模板匹配就这样。

有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐

 0
0 0
0- 0



 已为社区贡献9条内容
已为社区贡献9条内容

所有评论(0)