机器视觉 · 立体相机
文章目录立体相机 · 3D线激光轮廓传感器立体相机 · ToF立体相机立体相机 · 双目立体相机立体相机 · 结构光立体相机3D结构光与ToF、双目的优缺点对比立体相机 · 3D线激光轮廓传感器原理:3D线激光轮廓传感器:使用激光三角测量原理, 对被测物体表面进行二维轮廓扫描。激光源发出激光束,被一组特定透镜放大形成激光线,投射到被测物表面上。物体表面的反射光线穿过透镜,通过聚焦成像在感光阵列上形
·
立体相机 · 3D线激光轮廓传感器

- 原理:
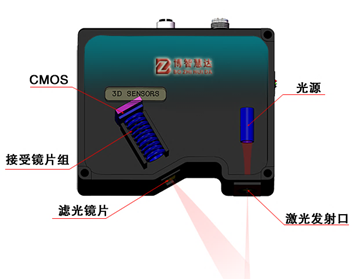
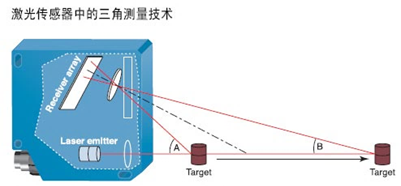
- 3D线激光轮廓传感器:使用激光三角测量原理, 对被测物体表面进行二维轮廓扫描。
- 激光源发出激光束,被一组特定透镜放大形成激光线,投射到被测物表面上。物体表面的反射光线穿过透镜,通过聚焦成像在感光阵列上形成光斑,经过图像处理生成高密度的3D点云轮廓影像。
- 适用场景:尺寸检测,缺陷检测,字符识别,引导定位。
- 供应商:
| 供应商 | 型号 | 净距离 | 近视场 | 远视场 | 检测范围 | 检测精度 | 检测速度 | 数据接口 | 含税价格 |
|---|---|---|---|---|---|---|---|---|---|
| 海康威视 | MV-DL2040-04B-H | 750 mm | 1000 mm | 2235 mm | 1000 mm | ±5 mm | 3 m/s | GigE | 8,500 |
| 海康威视 | MV-DL2025-04H-H | 650 mm | 1000 mm | 2600 mm | 1000 mm | ±5 mm | 3 m/s | GigE | / |
| 供应商 | 型号 | 轮廓点数 | 安装距离 | Z 轴测量范围 | 视野 | Z 轴重复精度 | X 轴分辨率 | 采样频率 | 数据接口 | 含税价格 |
|---|---|---|---|---|---|---|---|---|---|---|
| 海康威视 | MV-DP090-02B | 1920 | 119mm | 35mm | 76mm | 3µm | 0.048-0.071mm | 60~700Hz | GigE | 14,400 |
| 青波光电 | LM-2208 | 1280 | 95mm | 30mm | 29-35mm | 0.6μm | 0.022-0.027mm | 10~180Hz | GigE | 25,000 |
| 青波光电 | LM-2308 | 2048 | 95mm | 40mm | 50-65mm | 0.6μm | 0.024-0.032mm | 10~150Hz | GigE | 25,000 |
| 青波光电 | LH-2330 | 2048 | 80mm | 100mm | 54-96mm | 0.8μm | 0.026-0.046mm | 342-8000Hz | GigE | 45,000 |
| 青波光电 | LM-2408 | 3840 | 98mm | 34mm | 30-35mm | 0.6μm | 0.008-0.009mm | 10~150Hz | GigE | 25,000 |
| 青波光电 | LM-2430 | 3840 | 308mm | 224mm | 100-180mm | 5μm | 0.026-0.047mm | 10~30Hz | GigE | 25,000 |
| 青波光电 | LM-2450 | 3840 | 440mm | 420mm | 155-355mm | 10μm | 0.040-0.092mm | 10~30Hz | GigE | 25,000 |
| 青波光电 | LM-24A0 | 3840 | 610mm | 720mm | 265-730mm | 20μm | 0.069-0.190mm | 10~30Hz | GigE | 25,000 |
立体相机 · ToF立体相机

- 原理:
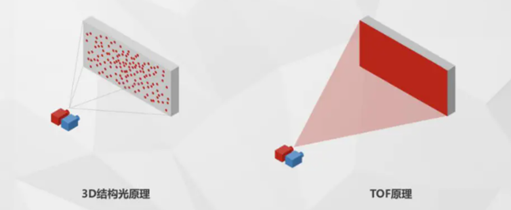
- ToF 飞行时间测距法(Time of flight),其工作原理是测量调制光线从光源发射、场景反射后进入传感器的时间延迟,利用发射光与反射光之间的相位移位,计算得到目标表面到传感器的距离。
- 优点:实时性高,复杂度极低,不需要额外增加计算资源。
- 缺点:传感器技术不是很成熟,因此分辨率较低,成本高。
- 为了精确计算相位移动,索尼 IMX556 DepthSense ToF 传感器采用电流辅助光电子解调器(CAPD)像素结构,对入射光与发射光调制同步采样:
- 调制光线从垂直腔面发射激光器(VCSEL)二极管中不间断地发射出来,到达物体表面后,光线被反射回CMOS传感器。
- CAPD在传感器感光元件的光电二极管中形成交变电压,产生一个可在两个检测结点(b1, b2)之间分离电子的交变漂移场,与VSCEL激光二极管的调制频率同步。为了充分捕捉反射光,两个结点的相位相差180°。
- 一旦光子在光电二极管内转换成电子,就被迅速分割,拉向检测结点,以此确保相机准确计算相移 。
- 背照式CMOS:电流辅助光电子解调器(CAPD)提供了一种有效的方式来解调和收集光电二极管内部的电子,但是反射光必须首先畅通无阻地到达传感器的光电二极管。与传统的前照式CMOS传感器设计不同,背照式传感器将布线层置于光电二极管下方,提高了光敏度。这样安置移除了任何可能会挡住部分射入光线的电线或电路障碍。
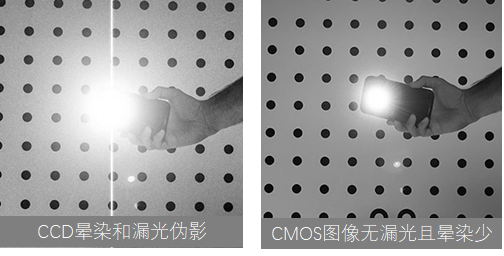
- 减少无用图像伪影是IMX556的另一个优点。由于IMX556是CMOS传感器,它比CCD ToF 传感器具有更好的抗漏光和抗晕染性能。漏光和晕染会导致3D数据出错,当电荷溢出像素阱容量,溢入相邻像素中,就会产生漏光和晕染。这种情况通常由强光源或反射表面造成。
- 用于计算距离的发射光对ToF(飞行时间)相机的性能至关重要。为了确保可靠的性能,Helios(LUCID加拿大相机厂商)相机使用4个垂直腔面发射激光器(VCSEL)发射调制光(嵌入安装在相机的四个角)。
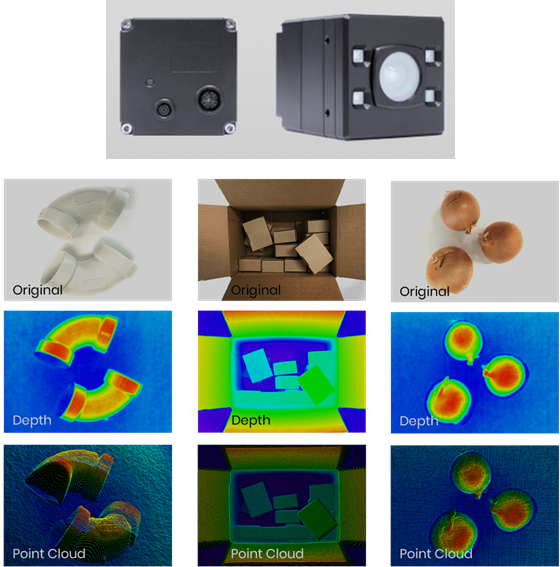
| 供应商 | LUCID(加拿大) |
|---|---|
| 型号 | Helios2 Time of Flight (ToF) IP67 3D |
| 芯片 | Sony DepthSense IMX556PLR CMOS |
| 快门 | Global |
| 靶面尺寸 | 1/2″ |
| 分辨率 | 640 x 480 (0.3 MP) |
| 像元尺寸 | 10x 10µm |
| 帧率 | 30 FPS |
| 数字信号接口 | GigE |
| 工作距离 | 6 模式:1.25米 / 3米 / 4米 / 5米 / 6米 / 8.333米 |
| 精度 | ± 4.0 mm |
| 光源(集成) | 4 x VCSEL laser diodes, Class 1, @ 850nm |
| 镜头(集成) | 集成 6mm S-mount 镜头(不可更换) |
| 价格 | 1495美元 (¥10,375 RMB) |
立体相机 · 双目立体相机

- 原理:
- 双目立体相机 ,基于双目立体视觉,不对外主动投射光源,完全依靠拍摄的两张图片(彩色RGB或者灰度图)来计算深度,因此有时候也被称为被动双目深度相机。
- 双目立体相机的深度测量过程如下:
- 首先需要对双目相机进行标定,得到两个相机的内外参数、单应矩阵。
- 根据标定结果对原始图像校正,校正后的两张图像位于同一平面且互相平行。
- 对校正后的两张图像进行像素点匹配。
- 根据匹配结果计算每个像素的深度,从而获得深度图。
- 优点
- 成本低,在室内室外都能使用。
- 缺点
- 对环境光照角度变化、强度变化等非常敏感。在光照较强(过度曝光)和较暗的情况下也会导致算法效果急剧下降。
- 不适用于单调缺乏纹理的场景。由于双目立体视觉法根据视觉特征进行图像匹配,所以对于缺乏视觉特征的场景会出现匹配困难,导致匹配误差较大甚至匹配失败。
- 需要逐像素计算匹配,计算复杂度高。
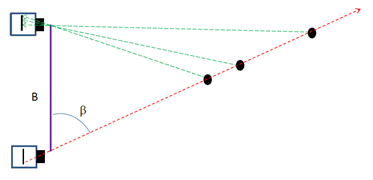
- 相机基线(两个摄像头间距)限制了测量范围。基线越大,测量范围越远;基线越小,测量范围越近。
- 供应商:
| 品牌 | 海康威视 | 海康威视 |
|---|---|---|
| 型号 | MV-DB1612-05H | MV-DB1308-05H |
| 价格 | 8360 | 7860 |
| 近视场 | 1100 mm×950 mm | 500 mm×500 mm |
| 远视场 | 2050 mm×1750 mm | 1000 mm×1000 mm |
| 净距离(CD) | 1000 mm | 500 mm |
| 检测精度 | ±5 mm | ±5mm |
| 数据类型 | 原始图,深度图,体积数据 | 原始图,深度图,体积数据 |
| 激光安全等级 | 3R | 3R |
| 数据接口 | GigE | GigE |
| 数字I/O | 12-pin M12 接口提供供电和 1 路 RS-232 | 12-pin M12 接口提供供电和 1 路 RS-232 |
| 典型功耗 | <10.0 W@12 VDC | <10 W@12 VDC |
| IP防护等级 | IP65 | IP65 |
| 温度 | 工作温度0~ 45°C,储藏温度-30~ 80°C | 工作温度0~ 45°C,储藏温度-30~80°C |
| 扫描帧率 | 14fps@深度图,5fps@体积数据 | 14fps@深度图,5fps@体积数据 |
| 测量范围(MR) | 800 mm | 500 mm |
立体相机 · 结构光立体相机

- 结构光立体相机 ,为了解决双目匹配算法的复杂度和鲁棒性问题而被提出。结构光法不依赖于物体本身的颜色和纹理,采用了主动投影已知图案的方法来实现快速鲁棒的匹配特征点,能够达到较高的精度,也大大扩展了适用范围。
- 结构光立体相机,通常采用特定波长的不可见的红外激光作为光源,它发射出来的光经过特定结构的编码投影在物体上,再由专门的红外摄像头进行采集,通过算法来计算返回的编码图案的畸变来得到物体的位置和深度信息,以此来获得三维结构。
- 根据编码图案不同一般有:
- 条纹结构光,代表传感器 enshape ,
- 编码结构光,代表传感器 Mantis Vision, Realsense(F200),
- 散斑结构光 ,代表传感器 apple(primesense), 奥比中光。
- 优点:
- 由于结构光主动投射编码光,因而非常适合在光照不足(甚至无光)、缺乏纹理的场景使用。
- 结构光投影图案一般经过精心设计,所以在一定范围内可以达到较高的测量精度。
- 技术成熟,深度图像可以做到相对较高的分辨率。
- 缺点
- 室外环境基本不能使用。这是因为在室外容易受到强自然光影响,导致投射的编码光被淹没。增加投射光源的功率可以一定程度上缓解该问题,但是效果并不能让人满意。
- 测量距离较近。物体距离相机越远,物体上的投影图案越大,精度也越差(想象一下手电筒照射远处的情景),相对应的测量精度也越差。所以基于结构光的深度相机测量精度随着距离的增大而大幅降低。因而,往往在近距离场景中应用较多。
- 容易受到光滑平面反光的影响。
- 在长时间监控方面,激光发射设备容易坏,重新更换设备后,需要重新标定。
3D结构光与ToF、双目的优缺点对比
| 双目 | 结构光 | ToF | |
|---|---|---|---|
| 基础原理 | 双目匹配,三角测量 | 激光条纹斑点编码 | 反射时间差 |
| 响应时间 | 慢 | 中 | 快 |
| 低光环境表现 | 弱 | 良好,取决于光源 | 良好(红外激光) |
| 强光环境变现 | 弱 | 弱 | 中 |
| 深度精确度 | 中 | 中高 | 低 |
| 分辨率 | 中高 | 中 | 低 |
| 识别距离 | 短,受基线限制 | 短,受光斑图案影响 | 中等(1-10m),受光源强度限制 |
| 软件复杂度 | 高 | 中 | 低 |
| 硬件成本 | 低 | 中 | 高 |
| 内外参标定 | 需要 | 需要 | / |

有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐
 1
1 0
0- 0



 已为社区贡献8条内容
已为社区贡献8条内容

所有评论(0)