Sliding Mode Control and Observation 学习 Chapter 1: Fast Terminal Sliding Mode 快速终端滑模
Fast terminal sliding mode (FTSM):Considering a simple second-order system:x˙1=x2x˙2=f+u\dot{x}_1=x_2\\\dot{x}_2=f+ux˙1=x2x˙2=f+uand assuming f=1f=1f=1.Designing the FTSM surface and controller as
快速终端滑模Fast terminal sliding mode (FTSM):
考虑一个简单的二阶系统:
x˙1=x2x˙2=f+u \dot{x}_1 = x_2 \\ \dot{x}_2 = f + u x˙1=x2x˙2=f+u
假设: f=1f = 1f=1.
设计如下FTSM滑模面与控制器:
s=x2+k1x1+k2x1p/qu=−ρsign(s)−k1x2−k2pqx1p/q−1x2 s = x_2 + k_1x_1 + k_2x_1^{p/q} \\ u = -\rho sign(s) - k_1x_2 - k_2\frac{p}{q}x_1^{p/q-1}x_2 s=x2+k1x1+k2x1p/qu=−ρsign(s)−k1x2−k2qpx1p/q−1x2
趋近时间算法与TSM相同。
当到达滑模面 s=0s=0s=0, 得到:
定义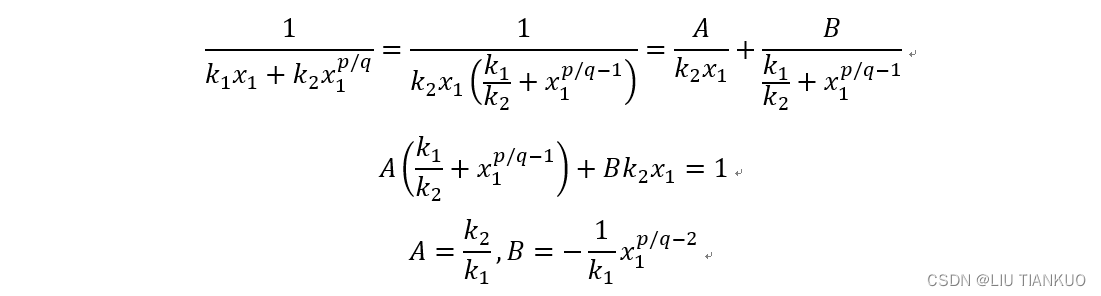
则滑动时间为,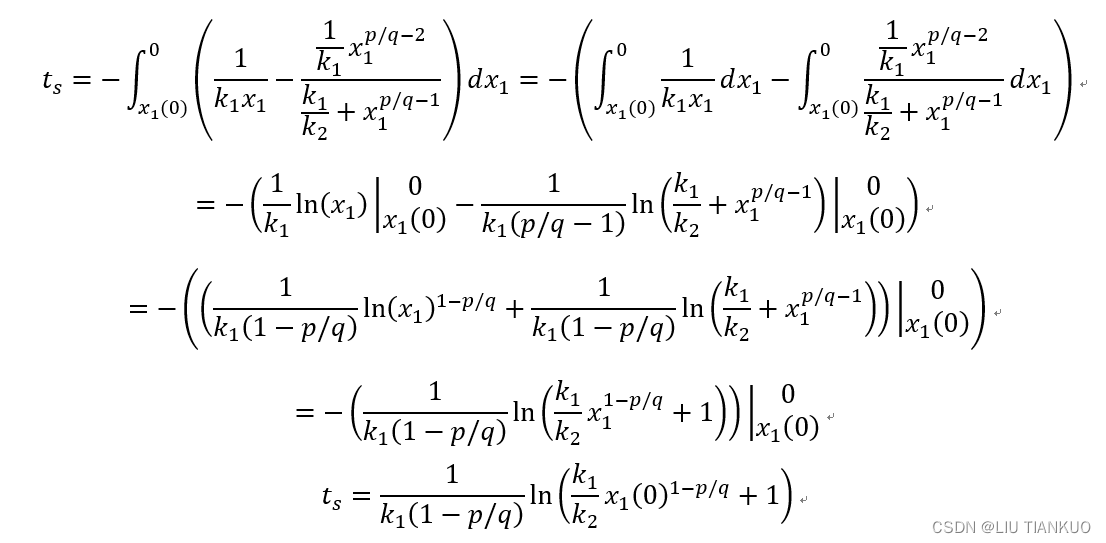
令 k1=1,k2=1,ρ=2,p/q=5/7k_1=1,k_2=1,\rho =2,p/q=5/7k1=1,k2=1,ρ=2,p/q=5/7, 得到FTSM的相轨迹图: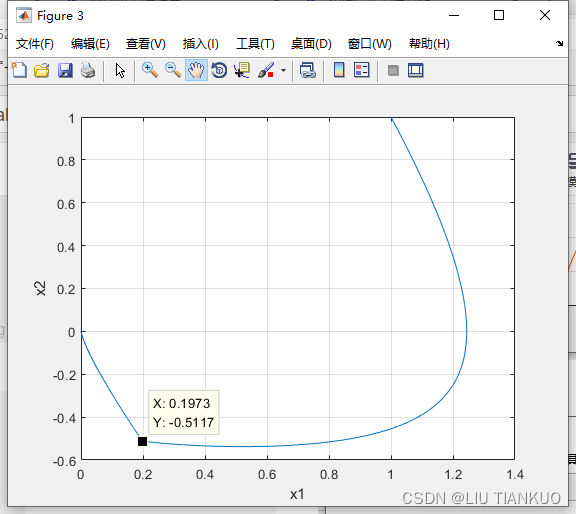
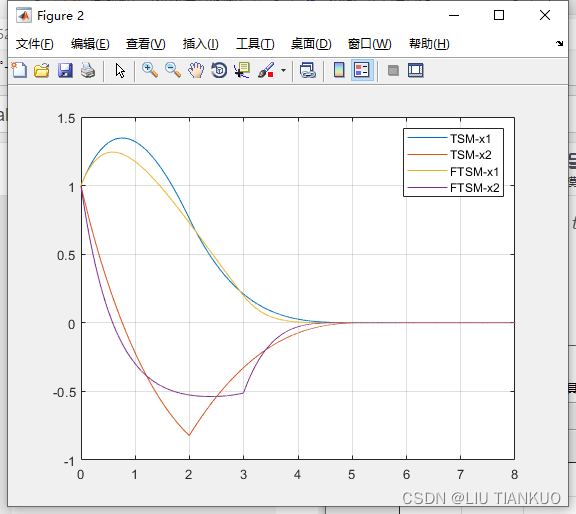
状态收敛图: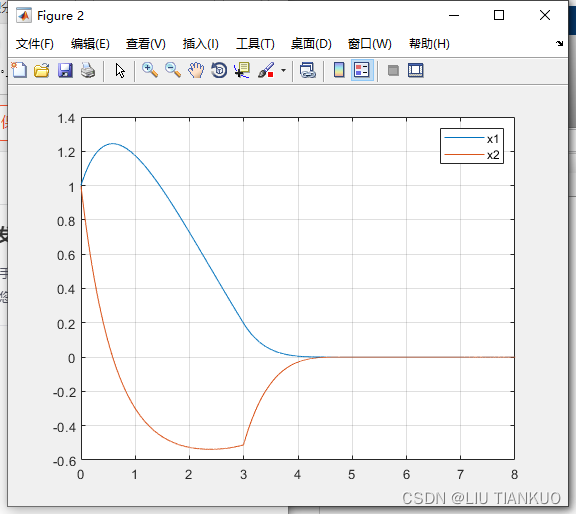
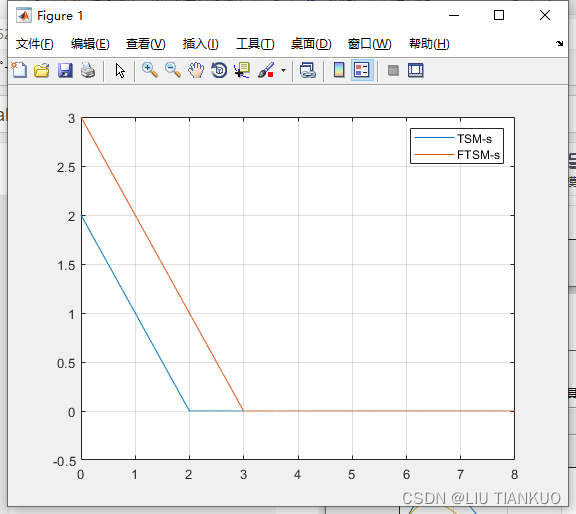
滑模面收敛过程: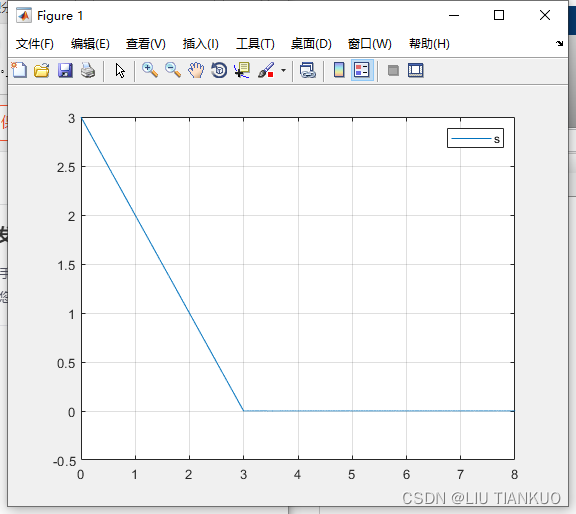
趋近时间为
tr=2ηV(0)=3st_r=\frac{\sqrt{2}}{\eta}\sqrt{V(0)}=3 str=η2V(0)=3s
当 s=0s=0s=0, and x1=0.1973x_1=0.1973x1=0.1973, 滑动时间为
ts=1k1(1−p/q)ln(k1k2x1(0)1−p/q+1)=1.7077s t_s=\frac{1}{k_1(1-p/q)}ln(\frac{k_1}{k_2}x_1(0)^{1-p/q}+1)=1.7077 s ts=k1(1−p/q)1ln(k2k1x1(0)1−p/q+1)=1.7077s
总收敛时间为
T=tr+ts=4.7077s T = t_r + t_s = 4.7077 s T=tr+ts=4.7077s
而TSM的收敛时间为
TTSM=tr+ts=2+3.23=5.23s T_{TSM} = t_r + t_s = 2 + 3.23 = 5.23 s TTSM=tr+ts=2+3.23=5.23s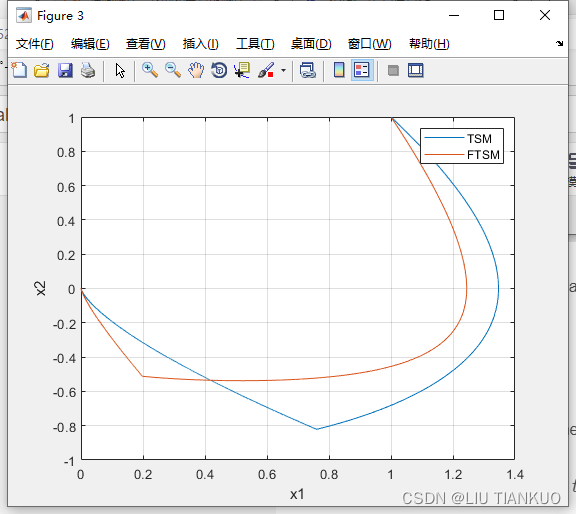

有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐

 0
0 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)