YOLOv11-ultralytics-8.3.67部分代码阅读笔记-torch_utils.py
【代码】YOLOv11-ultralytics-8.3.67部分代码阅读笔记-torch_utils.py。
torch_utils.py
ultralytics\utils\torch_utils.py
目录
2.def torch_distributed_zero_first(local_rank: int):
4.def autocast(enabled: bool, device: str = "cuda"):
7.def select_device(device="", batch=0, newline=False, verbose=True):
9.def fuse_conv_and_bn(conv, bn):
10.def fuse_deconv_and_bn(deconv, bn):
11.def model_info(model, detailed=False, verbose=True, imgsz=640):
13.def get_num_gradients(model):
14.def model_info_for_loggers(trainer):
15.def get_flops(model, imgsz=640):
16.def get_flops_with_torch_profiler(model, imgsz=640):
17.def initialize_weights(model):
18.def scale_img(img, ratio=1.0, same_shape=False, gs=32):
19.def copy_attr(a, b, include=(), exclude=()):
21.def intersect_dicts(da, db, exclude=()):
24.def one_cycle(y1=0.0, y2=1.0, steps=100):
25.def init_seeds(seed=0, deterministic=False):
27.def strip_optimizer(f: Union[str, Path] = "best.pt", s: str = "", updates: dict = None) -> dict:
28.def convert_optimizer_state_dict_to_fp16(state_dict):
29.def cuda_memory_usage(device=None):
30.def profile(input, ops, n=10, device=None, max_num_obj=0):
1.所需的库和模块
# Ultralytics 🚀 AGPL-3.0 License - https://ultralytics.com/license
import gc
import math
import os
import random
import time
from contextlib import contextmanager
from copy import deepcopy
from datetime import datetime
from pathlib import Path
from typing import Union
import numpy as np
import thop
import torch
import torch.distributed as dist
import torch.nn as nn
import torch.nn.functional as F
from ultralytics.utils import (
DEFAULT_CFG_DICT,
DEFAULT_CFG_KEYS,
LOGGER,
NUM_THREADS,
PYTHON_VERSION,
TORCHVISION_VERSION,
WINDOWS,
__version__,
colorstr,
)
from ultralytics.utils.checks import check_version
# Version checks (all default to version>=min_version)
# 这段代码使用了 check_version 函数来检查PyTorch和TorchVision的版本是否满足特定的最小版本要求,并且特别处理了在Windows上使用PyTorch 2.4.0时的已知问题。
# def check_version(current: str = "0.0.0", required: str = "0.0.0", name: str = "version", hard: bool = False, verbose: bool = False, msg: str = "",) -> bool:
# -> 用于检查当前版本是否满足指定的版本要求。返回版本检查的结果。如果 result 为 True ,表示版本检查通过;如果为 False ,表示版本检查未通过。
# -> return result
# 这些行分别检查当前安装的PyTorch版本是否大于或等于指定的版本号( 1.9.0 、 1.13.0 、 2.0.0 、 2.4.0 )。 check_version 函数会返回 True 或 False ,表示当前版本是否满足要求。
TORCH_1_9 = check_version(torch.__version__, "1.9.0")
TORCH_1_13 = check_version(torch.__version__, "1.13.0")
TORCH_2_0 = check_version(torch.__version__, "2.0.0")
TORCH_2_4 = check_version(torch.__version__, "2.4.0")
# 这些行分别检查当前安装的TorchVision版本是否大于或等于指定的版本号( 0.10.0 、 0.11.0 、 0.13.0 、 0.18.0 )。同样, check_version 函数会返回 True 或 False 。
TORCHVISION_0_10 = check_version(TORCHVISION_VERSION, "0.10.0")
TORCHVISION_0_11 = check_version(TORCHVISION_VERSION, "0.11.0")
TORCHVISION_0_13 = check_version(TORCHVISION_VERSION, "0.13.0")
TORCHVISION_0_18 = check_version(TORCHVISION_VERSION, "0.18.0")
# 检查当前操作系统是否为Windows,并且当前安装的PyTorch版本是否恰好为 2.4.0 。如果是,执行以下操作。
if WINDOWS and check_version(torch.__version__, "==2.4.0"): # reject version 2.4.0 on Windows
# 如果满足上述条件,使用 LOGGER.warning 记录一条警告信息,提示用户在Windows上使用PyTorch 2.4.0时存在已知问题,并建议用户升级到 torch>=2.4.1 以解决问题。警告信息中还包含了指向相关问题页面的链接。
LOGGER.warning(
"WARNING ⚠️ Known issue with torch==2.4.0 on Windows with CPU, recommend upgrading to torch>=2.4.1 to resolve " # 警告 ⚠️ 在带有 CPU 的 Windows 上,torch==2.4.0 存在已知问题,建议升级到 torch>=2.4.1 来解决。
"https://github.com/ultralytics/ultralytics/issues/15049"
)
# 这段代码通过调用 check_version 函数,检查了PyTorch和TorchVision的版本是否满足一系列的最小版本要求。特别地,它还检查了在Windows上是否安装了PyTorch 2.4.0版本,并在发现该版本时发出警告,建议用户升级到更高版本以避免已知问题。2.def torch_distributed_zero_first(local_rank: int):
# 这段代码定义了一个上下文管理器 torch_distributed_zero_first ,用于在分布式训练中确保所有进程等待本地主进程(rank 0)完成某个任务后再继续执行。这种机制常用于在分布式训练中同步操作,例如在主进程完成数据加载或模型初始化后再让其他进程继续执行。
# 使用 contextmanager 装饰器,这是 contextlib 模块中的一个工具,用于定义上下文管理器。它允许你通过一个生成器函数来定义 __enter__ 和 __exit__ 方法。
@contextmanager
# 定义了一个名为 torch_distributed_zero_first 的函数,接收一个参数。
# 1.local_rank :表示当前进程的本地排名。
def torch_distributed_zero_first(local_rank: int):
# 确保分布式训练中的所有进程都等待本地主机(等级 0)先完成任务。
"""Ensures all processes in distributed training wait for the local master (rank 0) to complete a task first."""
# 检查是否初始化了分布式训练环境。
# dist.is_available() :检查 PyTorch 的分布式训练功能是否可用。
# dist.is_initialized() :检查是否已经初始化了分布式训练环境。
# 如果两者都为 True ,则 initialized 为 True ,表示分布式训练环境已初始化。
initialized = dist.is_available() and dist.is_initialized()
# 如果分布式训练环境已初始化,并且当前进程的 local_rank 不是 -1 或 0 ,则执行以下操作。
# local_rank == -1 通常表示非分布式环境。
# local_rank == 0 表示主进程。
if initialized and local_rank not in {-1, 0}:
# dist.barrier(device_ids=[device_id1, device_id2, ...])
# 在 PyTorch 的分布式训练中, dist.barrier() 函数用于同步所有进程,确保它们在继续执行之前都达到了相同的执行点。当涉及到多个设备(例如,多个 GPU)时, dist.barrier() 可以接受一个 device_ids 参数,用于指定哪些设备参与同步。
# 参数 :
# device_ids :(可选)一个包含设备 ID 的列表。如果提供, dist.barrier() 将只同步指定的设备。如果不提供或为 None ,则同步所有设备。
# 工作原理 :
# 当一个进程中的某个设备调用 dist.barrier(device_ids) 后,它会暂停执行,直到所有进程中对应 device_ids 指定的设备都调用了该函数。
# 一旦所有指定的设备都到达了 barrier 点, dist.barrier() 函数会返回,然后所有设备继续执行后续的操作。
# 特点 :
# dist.barrier() 函数通常用于确保在分布式训练中所有进程都完成了某个特定的操作后再进行后续的操作,从而保证训练的一致性。
# 它可以用来同步数据加载、模型参数更新等操作,确保所有进程在执行下一步之前都已经完成了当前步骤。
# 在使用 dist.barrier() 时,需要先初始化进程组,并在结束时销毁进程组。
# dist.barrier(device_ids) 函数是 PyTorch 分布式训练中实现设备间同步的重要工具,它确保了在执行下一步之前,所有指定的设备都已经完成了当前步骤,从而保证了训练的一致性和稳定性。
# 调用 dist.barrier 方法,创建一个同步屏障。所有非主进程( local_rank != 0 )会在这里阻塞,直到主进程完成任务并调用 dist.barrier 。
dist.barrier(device_ids=[local_rank])
# 这是上下文管理器的关键部分。 yield 语句将上下文管理器分为两部分 : yield 之前的代码在进入上下文时执行。 yield 之后的代码在退出上下文时执行。
yield
# 如果分布式训练环境已初始化,并且当前进程是主进程( local_rank == 0 ),则执行以下操作。
if initialized and local_rank == 0:
# 主进程调用 dist.barrier ,释放所有在同步屏障处阻塞的非主进程。这确保了所有进程在主进程完成任务后继续执行。
dist.barrier(device_ids=[local_rank])
# torch_distributed_zero_first 上下文管理器的作用是。确保主进程优先执行:在分布式训练中,主进程(rank 0)会先完成某个任务(如数据加载或模型初始化)。同步所有进程:主进程完成任务后,通过调用 dist.barrier ,释放所有在同步屏障处阻塞的非主进程,确保所有进程在主进程完成任务后继续执行。这种机制在分布式训练中非常有用,可以避免因进程执行顺序不一致而导致的潜在问题。3.def smart_inference_mode():
# 这段代码定义了一个名为 smart_inference_mode 的函数,用于根据 PyTorch 的版本动态选择合适的装饰器,以优化模型推理模式。
# 定义了一个名为 smart_inference_mode 的函数。这个函数的作用是返回一个装饰器,用于在推理模式下优化 PyTorch 模型的运行。
def smart_inference_mode():
# 如果 torch>=1.9.0,则应用 torch.inference_mode() 装饰器,否则应用 torch.no_grad() 装饰器。
"""Applies torch.inference_mode() decorator if torch>=1.9.0 else torch.no_grad() decorator."""
# 在 smart_inference_mode 函数内部定义了一个嵌套函数 decorate ,它接受一个函数 1.fn 作为参数。这个嵌套函数的作用是根据 PyTorch 的版本和当前状态,决定如何装饰输入函数 fn 。
def decorate(fn):
# 根据 torch 版本为推理模式应用适当的 torch 装饰器。
"""Applies appropriate torch decorator for inference mode based on torch version."""
# 检查两个条件。
# TORCH_1_9 :这是一个已经定义的布尔变量,表示 PyTorch 版本是否大于或等于 1.9.0。
# torch.is_inference_mode_enabled() :检查当前是否已经启用了推理模式。 如果两个条件都满足,说明当前环境已经处于推理模式,无需额外装饰。
if TORCH_1_9 and torch.is_inference_mode_enabled():
# 如果上述条件满足,直接返回原始函数 fn ,不进行任何装饰。这相当于一个“直通”操作,避免重复设置推理模式。
return fn # already in inference_mode, act as a pass-through
# 如果上述条件不满足,进入 else 分支。
else:
# 根据 TORCH_1_9 的值选择合适的装饰器。 如果 TORCH_1_9 为 True ,使用 torch.inference_mode() 装饰器。 否则,使用 torch.no_grad() 装饰器。 无论选择哪种装饰器,都会将其应用到输入函数 fn 上,并返回装饰后的函数。
return (torch.inference_mode if TORCH_1_9 else torch.no_grad)()(fn)
# 最后, smart_inference_mode 函数返回嵌套的 decorate 函数。这样, smart_inference_mode 本身可以作为一个装饰器工厂使用。
return decorate
# 这段代码实现了一个动态的装饰器选择机制,根据 PyTorch 的版本和当前状态,自动选择最适合的推理模式装饰器。它的主要作用是优化模型在推理阶段的性能,同时保持代码的兼容性(支持 PyTorch 1.9.0 之前和之后的版本)。通过这种方式,开发者可以更灵活地编写推理代码,而无需手动检查 PyTorch 版本或推理状态。
# torch.inference_mode() 和 torch.no_grad() 都是 PyTorch 中用于优化模型推理(inference)阶段的上下文管理器或装饰器,但它们在实现和功能上有一些关键区别。以下是它们的主要区别 :
# torch.no_grad() :
# 功能 : torch.no_grad() 是一个上下文管理器或装饰器,用于禁用梯度计算。 在其作用范围内,所有张量的 requires_grad 属性都将被设置为 False ,这意味着不会跟踪张量的梯度信息,从而节省内存和计算资源。
# 适用场景 :主要用于推理(inference)阶段,因为在推理时不需要计算梯度。 也常用于评估模型性能(如计算准确率、损失等)时,避免不必要的梯度计算。
# 版本兼容性 : torch.no_grad() 是 PyTorch 较早版本中引入的,适用于所有版本。
# 示例代码 :
# with torch.no_grad():
# output = model(input)
# torch.inference_mode() :
# 功能 : torch.inference_mode() 是 PyTorch 1.9.0 引入的一个新的上下文管理器或装饰器,专门用于优化推理阶段。 它不仅禁用了梯度计算(与 torch.no_grad() 类似),还启用了额外的优化,例如 :
# 减少内存占用 :通过优化内部机制,减少推理时的内存占用。
# 提高计算效率 :在某些情况下,推理模式会自动启用一些针对推理的优化算法。
# 适用场景 :主要用于模型的推理阶段,尤其是对性能和内存效率有较高要求的场景。
# 版本兼容性 : torch.inference_mode() 仅在 PyTorch 1.9.0 及以上版本中可用。 在 PyTorch 1.9.0 之前, torch.inference_mode() 不存在,因此需要使用 torch.no_grad() 作为替代。
# 示例代码 :
# with torch.inference_mode():
# output = model(input)
# 总结 :如果使用的是 PyTorch 1.9.0 或更高版本,推荐在推理阶段使用 torch.inference_mode() ,因为它提供了额外的优化,能够提高推理效率并减少内存占用。 如果 PyTorch 版本低于 1.9.0,或者你需要在推理和评估阶段通用的代码,可以使用 torch.no_grad() 。 在实际开发中, torch.inference_mode() 可以看作是 torch.no_grad() 的一个增强版本,专门用于推理场景。4.def autocast(enabled: bool, device: str = "cuda"):
# 这段代码定义了一个名为 autocast 的函数,用于根据 PyTorch 的版本动态选择混合精度训练的上下文管理器。
# 这行代码定义了一个名为 autocast 的函数,它接受两个参数。
# 1.enabled :一个布尔值( bool ),用于控制是否启用混合精度训练。
# 2.device :一个字符串( str ),默认值为 "cuda" ,表示混合精度训练的目标设备(通常是 GPU)。
def autocast(enabled: bool, device: str = "cuda"):
# 根据 PyTorch 版本和 AMP 设置获取适当的自动转换上下文管理器。
# 此函数返回一个用于自动混合精度 (AMP) 训练的上下文管理器,该管理器与 PyTorch 的旧版本和新版本兼容。它处理 PyTorch 版本之间自动转换 API 的差异。
# 注意:
# - 对于 PyTorch 版本 1.13 及更新版本,它使用“torch.amp.autocast”。
# - 对于旧版本,它使用“torch.cuda.autocast”。
"""
Get the appropriate autocast context manager based on PyTorch version and AMP setting.
This function returns a context manager for automatic mixed precision (AMP) training that is compatible with both
older and newer versions of PyTorch. It handles the differences in the autocast API between PyTorch versions.
Args:
enabled (bool): Whether to enable automatic mixed precision.
device (str, optional): The device to use for autocast. Defaults to 'cuda'.
Returns:
(torch.amp.autocast): The appropriate autocast context manager.
Note:
- For PyTorch versions 1.13 and newer, it uses `torch.amp.autocast`.
- For older versions, it uses `torch.cuda.autocast`.
Example:
```python
with autocast(amp=True):
# Your mixed precision operations here
pass
```
"""
# 检查一个名为 TORCH_1_13 的变量。这个变量是一个布尔值,用于判断当前使用的 PyTorch 版本是否为 1.13 或更高版本。如果 TORCH_1_13 为 True ,则表示使用的是 PyTorch 1.13 或更高版本。
if TORCH_1_13:
# 如果当前 PyTorch 版本为 1.13 或更高版本,返回 torch.amp.autocast 上下文管理器。
# torch.amp.autocast 是 PyTorch 提供的一个工具,用于在训练过程中自动选择混合精度(FP16 和 FP32)计算,以加速训练并减少显存占用。这里传递了两个参数 :
# device :指定混合精度训练的目标设备(如 "cuda" )。
# enabled :布尔值,用于控制是否启用混合精度训练。
return torch.amp.autocast(device, enabled=enabled)
# 如果 TORCH_1_13 为 False ,即当前使用的 PyTorch 版本低于 1.13,代码将执行 else 分支。
else:
# 在 PyTorch 1.13 之前的版本中, torch.cuda.amp.autocast 是混合精度训练的上下文管理器。
# 返回 torch.cuda.amp.autocast ,并传递 enabled 参数,用于控制是否启用混合精度训练。
return torch.cuda.amp.autocast(enabled)
# 这段代码的作用是根据 PyTorch 的版本动态选择合适的混合精度训练上下文管理器。它通过检查 TORCH_1_13 变量来判断当前 PyTorch 版本是否为 1.13 或更高版本。如果是,则使用 torch.amp.autocast ;否则,使用 torch.cuda.amp.autocast 。这种设计使得代码能够兼容不同版本的 PyTorch,确保混合精度训练功能在不同环境中都能正常工作。
# def autocast(enabled: bool, device: str = "cuda"):
# -> 用于根据 PyTorch 的版本动态选择混合精度训练的上下文管理器。如果当前 PyTorch 版本为 1.13 或更高版本,返回 torch.amp.autocast 上下文管理器。返回 torch.cuda.amp.autocast ,并传递 enabled 参数,用于控制是否启用混合精度训练。
# -> return torch.amp.autocast(device, enabled=enabled) / return torch.cuda.amp.autocast(enabled)5.def get_cpu_info():
# 这段代码定义了一个名为 get_cpu_info 的函数,用于获取系统的 CPU 信息,并返回一个简洁的字符串描述,例如 "Apple M2" 。
# 定义了一个函数 get_cpu_info ,该函数不接收任何参数,其目的是返回系统的 CPU 信息。
def get_cpu_info():
# 返回包含系统 CPU 信息的字符串,例如“Apple M2”。
"""Return a string with system CPU information, i.e. 'Apple M2'."""
# 从 ultralytics.utils 模块中导入 PERSISTENT_CACHE ,这是一个持久化缓存字典,用于存储一些全局信息,避免重复计算。这里导入时特别注明“避免循环导入错误”,说明在项目结构中可能存在依赖关系需要注意。
from ultralytics.utils import PERSISTENT_CACHE # avoid circular import error
# 检查 PERSISTENT_CACHE 中是否已经缓存了 CPU 信息。如果尚未缓存,则进入以下代码块进行获取。
if "cpu_info" not in PERSISTENT_CACHE:
# 尝试导入 cpuinfo 模块,这是一个第三方库,用于获取系统的 CPU 信息。如果未安装,可以通过 pip install py-cpuinfo 进行安装。
try:
import cpuinfo # pip install py-cpuinfo
# 定义一个元组 k ,包含三个键值,按优先级排序。这些键值是 cpuinfo 模块返回的 CPU 信息字典中可能存在的字段,用于获取最合适的 CPU 描述信息。
k = "brand_raw", "hardware_raw", "arch_string_raw" # keys sorted by preference
# 调用 cpuinfo.get_cpu_info() 获取系统的 CPU 信息,返回一个字典 info ,其中包含各种 CPU 相关的属性。
info = cpuinfo.get_cpu_info() # info dict
# 从 info 字典中按优先级顺序尝试获取 CPU 描述信息。
# 首先尝试获取 brand_raw (品牌信息)。
# 如果不存在,则尝试获取 hardware_raw (硬件信息)。
# 如果仍不存在,则尝试获取 arch_string_raw (架构信息)。
# 如果以上字段都不存在,则返回默认值 "unknown" 。
string = info.get(k[0] if k[0] in info else k[1] if k[1] in info else k[2], "unknown")
# 将获取到的 CPU 描述字符串存储到 PERSISTENT_CACHE 中,同时对字符串进行清理。
# 移除商标符号 (R) 。
# 移除多余的 "CPU " 前缀。
# 移除多余的 "@ " 前缀。
# 最终存储的字符串是一个简洁的 CPU 描述,例如 "Apple M2" 。
PERSISTENT_CACHE["cpu_info"] = string.replace("(R)", "").replace("CPU ", "").replace("@ ", "")
# 如果在获取 CPU 信息的过程中发生任何异常(例如 cpuinfo 模块未安装或无法正常工作),则捕获异常并忽略错误,继续执行后续代码。
except Exception:
pass
# 从 PERSISTENT_CACHE 中返回缓存的 CPU 信息。如果未缓存,则返回默认值 "unknown" 。
return PERSISTENT_CACHE.get("cpu_info", "unknown")
# get_cpu_info 函数通过调用第三方库 cpuinfo 获取系统的 CPU 信息,并返回一个简洁的字符串描述。该函数利用 PERSISTENT_CACHE 进行结果缓存,避免重复计算,提高效率。同时,它通过异常处理机制确保了即使在依赖库缺失或运行时出错的情况下,也能安全地返回默认值 "unknown" 。6.def get_gpu_info(index):
# 这段代码定义了一个名为 get_gpu_info 的函数,用于获取指定 GPU 设备的详细信息,包括设备名称和显存大小。
# 定义了一个函数 get_gpu_info ,接收一个参数。
# 1.index :要查询的 GPU 设备的索引编号。
def get_gpu_info(index):
# 返回包含系统 GPU 信息的字符串,例如“Tesla T4, 15102MiB”。
"""Return a string with system GPU information, i.e. 'Tesla T4, 15102MiB'."""
# torch.cuda.get_device_properties(device)
# torch.cuda.get_device_properties() 函数是 PyTorch 中用于获取指定 GPU 设备属性的函数。
# 参数 :
# device (torch.device 或 int 或 str) :要返回设备属性的设备。可以是设备 ID(整数),类似于 gpu:x 的设备名称,或者是 torch.device 对象。如果 device 为空,则默认为当前设备。默认值为 None。
# 返回值 :
# 返回一个 _CudaDeviceProperties 对象,其中包含以下属性 :
# name :GPU 设备的名称(字符串)。
# total_memory :GPU 总显存大小,以字节为单位(整数)。
# major :CUDA 计算能力的主要版本号(整数)。
# minor :CUDA 计算能力的次要版本号(整数)。
# multi_processor_count :GPU 设备的多处理器数量(整数)。
# is_integrated :GPU 是否是集成显卡,返回 True 或 False(布尔值)。
# is_multi_gpu_board :GPU 是否是多 GPU 板卡,返回 True 或 False(布尔值)。
# 这个函数可以帮助你了解指定 GPU 设备的详细信息,例如显存大小、计算能力等,这些信息对于深度学习模型的训练和优化非常有用。
# 调用 torch.cuda.get_device_properties(index) ,获取指定索引编号的 GPU 设备的属性信息。这些属性信息包括设备名称、显存大小等。
properties = torch.cuda.get_device_properties(index)
# 使用格式化字符串返回 GPU 设备的名称和显存大小。
# properties.name 是 GPU 设备的名称,例如 "NVIDIA GeForce RTX 3080" 。
# properties.total_memory 是 GPU 的总显存大小(以字节为单位)。通过除以 (1 << 20) (即 2 的 20 次方,等于 1048576),将显存大小从字节转换为 MiB(兆字节)。
# :.0f 表示将显存大小保留为整数(不显示小数点)。
return f"{properties.name}, {properties.total_memory / (1 << 20):.0f}MiB"
# get_gpu_info 函数通过调用 PyTorch 的 torch.cuda.get_device_properties 方法,获取指定 GPU 设备的属性信息,并格式化输出设备名称和显存大小(以 MiB 为单位)。该函数主要用于在设备选择和配置过程中,为用户提供详细的 GPU 信息,方便调试和监控硬件资源。7.def select_device(device="", batch=0, newline=False, verbose=True):
# 这段代码定义了一个名为 select_device 的函数,用于根据用户指定的设备字符串(如 "cpu" 、 "cuda" 、 "mps" 等)选择合适的计算设备(CPU、GPU 或 MPS),并进行一系列的检查和配置,以确保设备选择的正确性和兼容性。
# 这行代码定义了一个名为 select_device 的函数,它接受以下参数 :
# 1.device :字符串,指定要使用的设备,默认为空字符串。可以是 "cpu" 、 "cuda" 、 "cuda:0" 、 "mps" 等。
# 2.batch :整数,表示批量大小,默认为 0。在多 GPU 训练时用于检查批量大小是否合理。
# 3.newline :布尔值,控制输出信息是否换行,默认为 False 。
# 4.verbose :布尔值,控制是否打印设备选择信息,默认为 True 。
def select_device(device="", batch=0, newline=False, verbose=True):
# 根据提供的参数选择适当的 PyTorch 设备。
# 该函数接受指定设备的字符串或 torch.device 对象,并返回表示所选设备的 torch.device 对象。该函数还会验证可用设备的数量,如果请求的设备不可用,则会引发异常。
# 引发:
# ValueError:如果指定的设备不可用,或者使用多个 GPU 时批处理大小不是设备数量的倍数。
# 注意:
# 设置“CUDA_VISIBLE_DEVICES”环境变量以指定要使用的 GPU。
"""
Selects the appropriate PyTorch device based on the provided arguments.
The function takes a string specifying the device or a torch.device object and returns a torch.device object
representing the selected device. The function also validates the number of available devices and raises an
exception if the requested device(s) are not available.
Args:
device (str | torch.device, optional): Device string or torch.device object.
Options are 'None', 'cpu', or 'cuda', or '0' or '0,1,2,3'. Defaults to an empty string, which auto-selects
the first available GPU, or CPU if no GPU is available.
batch (int, optional): Batch size being used in your model. Defaults to 0.
newline (bool, optional): If True, adds a newline at the end of the log string. Defaults to False.
verbose (bool, optional): If True, logs the device information. Defaults to True.
Returns:
(torch.device): Selected device.
Raises:
ValueError: If the specified device is not available or if the batch size is not a multiple of the number of
devices when using multiple GPUs.
Examples:
>>> select_device("cuda:0")
device(type='cuda', index=0)
>>> select_device("cpu")
device(type='cpu')
Note:
Sets the 'CUDA_VISIBLE_DEVICES' environment variable for specifying which GPUs to use.
"""
# 如果传入的 device 参数已经是一个 torch.device 对象,或者是一个以 "tpu" 开头的字符串(表示 TPU 设备)。
if isinstance(device, torch.device) or str(device).startswith("tpu"):
# 则直接返回该设备对象,无需进一步处理。
return device
# 这段代码是 select_device 函数的核心部分,主要负责解析用户指定的设备字符串,判断设备类型,并进行相应的环境配置和检查。
# 创建一个字符串 s ,包含当前使用的 Ultralytics 版本、Python 版本和 PyTorch 版本信息。这通常用于后续的日志输出,方便调试和记录。
s = f"Ultralytics {__version__} 🚀 Python-{PYTHON_VERSION} torch-{torch.__version__} "
# 将用户传入的 device 参数转换为小写字符串。这一步是为了确保后续的设备判断不受大小写的影响,例如 "CPU" 和 "cpu" 都会被视为相同。
device = str(device).lower()
# 遍历一个元组,包含一些常见的字符(如 "cuda:" 、括号、空格等)。将这些字符从 device 字符串中移除。
# 例如 :
# "cuda:0" 转换为 "0" 。
# "(0, 1)" 转换为 "0,1" 。
# 这一步的目的是将设备字符串简化为更通用的格式,便于后续解析。
for remove in "cuda:", "none", "(", ")", "[", "]", "'", " ":
device = device.replace(remove, "") # to string, 'cuda:0' -> '0' and '(0, 1)' -> '0,1'
# 判断简化后的 device 是否为 "cpu" ,并将结果存储在布尔变量 cpu 中。
cpu = device == "cpu"
# 判断 device 是否为 "mps" 或 "mps:0" ,并将结果存储在布尔变量 mps 中。 MPS 是 Apple 的 Metal Performance Shaders,用于 Mac 设备的 GPU 加速。
mps = device in {"mps", "mps:0"} # Apple Metal Performance Shaders (MPS)
# 如果用户请求的是 CPU 或 MPS 设备,则将环境变量 CUDA_VISIBLE_DEVICES 设置为 "-1" 。 这一步会强制 PyTorch 认为没有可用的 CUDA 设备,从而避免后续代码误判。
if cpu or mps:
os.environ["CUDA_VISIBLE_DEVICES"] = "-1" # force torch.cuda.is_available() = False
# 如果用户请求的不是 CPU 设备(即请求了 GPU 或其他设备),则进入此分支。
elif device: # non-cpu device requested
# 如果用户仅指定了 "cuda" 而未指定具体的 GPU 编号,则默认使用第一个 GPU(编号为 "0" )。
if device == "cuda":
device = "0"
# 如果 device 中包含逗号(表示多 GPU),则移除多余的逗号。
# 例如, "0,,1" 转换为 "0,1" 。
if "," in device:
device = ",".join([x for x in device.split(",") if x]) # remove sequential commas, i.e. "0,,1" -> "0,1"
# 获取当前的 CUDA_VISIBLE_DEVICES 环境变量值,并将其存储在变量 visible 中。
visible = os.environ.get("CUDA_VISIBLE_DEVICES", None)
# 将环境变量 CUDA_VISIBLE_DEVICES 设置为用户指定的设备编号。
# 注意:这一步必须在检查 torch.cuda.is_available() 之前完成,因为环境变量的设置会影响 PyTorch 对可用设备的判断。
os.environ["CUDA_VISIBLE_DEVICES"] = device # set environment variable - must be before assert is_available()
# 条件判断。
# torch.cuda.is_available() :检查当前环境中是否有可用的 CUDA 设备(即 GPU)。
# torch.cuda.device_count() :返回当前环境中可用的 GPU 数量。
# len(device.split(",")) :计算用户请求的 GPU 数量(通过逗号分隔的设备编号字符串)。
# 条件 not (...) :如果以下任一条件不满足,则进入异常处理 :
# 没有可用的 CUDA 设备( torch.cuda.is_available() 返回 False )。
# 可用的 GPU 数量少于用户请求的数量( torch.cuda.device_count() < len(device.split(",")) )。
if not (torch.cuda.is_available() and torch.cuda.device_count() >= len(device.split(","))):
# 如果条件不满足,首先通过 LOGGER.info 打印之前生成的版本信息字符串 s ,方便调试和记录。
LOGGER.info(s)
# 动态生成安装提示信息。
# 如果 torch.cuda.device_count() 返回 0 (即没有可用的 CUDA 设备),则生成一条提示信息,建议用户检查 PyTorch 的安装是否正确。
# 如果有可用的 CUDA 设备,则不生成此提示。
install = (
"See https://pytorch.org/get-started/locally/ for up-to-date torch install instructions if no "
"CUDA devices are seen by torch.\n" # 如果 torch 没有看到 CUDA 设备,请参阅https://pytorch.org/get-started/locally/ 获取最新的 torch 安装说明。
if torch.cuda.device_count() == 0
else ""
)
# 抛出异常。
# 抛出一个 ValueError 异常,提供详细的错误信息。
raise ValueError(
f"Invalid CUDA 'device={device}' requested." # 请求的 CUDA‘device={device}’无效。
f" Use 'device=cpu' or pass valid CUDA device(s) if available," # 使用‘device=cpu’或传递有效的 CUDA 设备(如果可用),
f" i.e. 'device=0' or 'device=0,1,2,3' for Multi-GPU.\n" # 即‘device=0’或‘device=0,1,2,3’用于多 GPU。
f"\ntorch.cuda.is_available(): {torch.cuda.is_available()}"
f"\ntorch.cuda.device_count(): {torch.cuda.device_count()}"
f"\nos.environ['CUDA_VISIBLE_DEVICES']: {visible}\n"
f"{install}"
)
# 这段代码的核心功能是解析用户指定的设备字符串,并根据设备类型进行相应的环境配置和检查。主要逻辑包括。设备字符串的标准化:通过移除多余字符,将设备字符串简化为通用格式。设备类型的判断:判断用户请求的是 CPU、MPS 还是 GPU 设备。环境变量的配置:根据用户请求的设备类型,设置 CUDA_VISIBLE_DEVICES 环境变量。设备可用性的检查:确保请求的 GPU 设备在当前环境中可用,否则抛出异常并提供详细的错误信息。通过这些步骤,代码能够灵活地支持多种设备选择场景,并确保设备选择的正确性和兼容性。
# 这段代码是 select_device 函数的后半部分,主要负责根据设备选择的结果进行进一步的配置和信息输出,并最终返回一个 torch.device 对象。
# 如果当前设备不是 CPU 或 MPS,并且 PyTorch 支持 CUDA(即 GPU 可用),则优先选择 GPU。
if not cpu and not mps and torch.cuda.is_available(): # prefer GPU if available
# 将用户指定的设备字符串(如 "0,1" )分割为一个列表(如 ["0", "1"] )。如果用户没有指定设备,则默认为 "0" ,表示使用第一个 GPU。
devices = device.split(",") if device else "0" # i.e. "0,1" -> ["0", "1"]
# 计算设备的数量(即 GPU 的数量)。
n = len(devices) # device count
# 如果设备数量大于 1,表示用户希望使用多 GPU 。
if n > 1: # multi-GPU
# 如果批量大小 batch 小于 1,则抛出错误。多 GPU 训练时,批量大小必须是一个正整数。
if batch < 1:
raise ValueError(
"AutoBatch with batch<1 not supported for Multi-GPU training, "
"please specify a valid batch size, i.e. batch=16." # 批次小于 1 的 AutoBatch 不支持多 GPU 训练,请指定有效的批次大小,即批次 = 16。
)
# 如果批量大小 batch 不能被 GPU 数量整除,则抛出错误。这是因为多 GPU 训练时,每个 GPU 上的批量大小必须相等。
if batch >= 0 and batch % n != 0: # check batch_size is divisible by device_count
raise ValueError(
f"'batch={batch}' must be a multiple of GPU count {n}. Try 'batch={batch // n * n}' or " # 'batch={batch}' 必须是 GPU 数量 {n} 的倍数。
f"'batch={batch // n * n + n}', the nearest batch sizes evenly divisible by {n}." # 请尝试 'batch={batch // n * n}' 或 'batch={batch // n * n + n}',最接近的批处理大小可被 {n} 整除。
)
# 定义一个字符串 space ,用于在日志输出中对齐文本。
space = " " * (len(s) + 1)
# 遍历所有 GPU 设备,将每个 GPU 的信息(如 设备编号 和 显存信息 )添加到日志字符串 s 中。
for i, d in enumerate(devices):
# get_gpu_info(i) 是一个函数,用于获取第 i 个 GPU 的信息。
s += f"{'' if i == 0 else space}CUDA:{d} ({get_gpu_info(i)})\n" # bytes to MB
# 如果选择了 GPU,将返回的设备参数设置为 "cuda:0" 。
arg = "cuda:0"
# 如果当前设备支持 MPS(Apple Metal Performance Shaders),并且 PyTorch 版本为 2.0 及以上,则选择 MPS 设备。
elif mps and TORCH_2_0 and torch.backends.mps.is_available():
# Prefer MPS if available
# get_cpu_info() 是一个函数,用于获取 CPU 的信息。
s += f"MPS ({get_cpu_info()})\n"
arg = "mps"
# 如果既没有可用的 GPU,也没有可用的 MPS 设备,则默认使用 CPU。
else: # revert to CPU
s += f"CPU ({get_cpu_info()})\n"
arg = "cpu"
# 如果选择的设备是 CPU 或 MPS,则设置 PyTorch 的线程数为 NUM_THREADS ,以优化 CPU 训练的性能。
if arg in {"cpu", "mps"}:
torch.set_num_threads(NUM_THREADS) # reset OMP_NUM_THREADS for cpu training
# 如果 verbose 参数为 True ,则将设备信息打印到日志中。如果 newline 参数为 True ,则在日志末尾添加换行符。
if verbose:
LOGGER.info(s if newline else s.rstrip())
# 返回一个 torch.device 对象,表示 最终选择的设备 。
return torch.device(arg)
# 这段代码的核心功能是根据用户输入的设备参数和当前系统的硬件配置,选择合适的设备(CPU、GPU 或 MPS)供 PyTorch 使用。它支持单 GPU 和多 GPU 训练,并对批量大小进行了校验,确保其与 GPU 数量兼容。此外,它还提供了详细的日志输出,方便用户了解当前的设备配置。
# select_device 函数是一个用于设备选择和配置的工具,它根据用户指定的设备参数(如 CPU、GPU 或 MPS)以及系统的硬件环境,自动检测并选择合适的计算设备供 PyTorch 使用。该函数支持单 GPU 和多 GPU 训练,并对批量大小进行校验,确保其与 GPU 数量兼容。同时,它还提供了详细的日志输出,方便用户了解当前的设备配置和环境信息,从而实现灵活且高效的设备管理。
# def select_device(device="", batch=0, newline=False, verbose=True):
# -> 用于根据用户指定的设备字符串(如 "cpu" 、 "cuda" 、 "mps" 等)选择合适的计算设备(CPU、GPU 或 MPS),并进行一系列的检查和配置,以确保设备选择的正确性和兼容性。返回一个 torch.device 对象,表示 最终选择的设备 。
# -> return torch.device(arg)8.def time_sync():
# 这段代码定义了一个函数 time_sync ,用于获取 PyTorch 中准确的时间戳,特别是在涉及 GPU 计算时。
# 定义了一个函数 time_sync ,它不接受任何参数。
def time_sync():
# PyTorch 精确的时间。
"""PyTorch-accurate time."""
# 检查 CUDA 是否可用,即是否有可用的 GPU。
if torch.cuda.is_available():
# 如果 CUDA 可用,则调用 torch.cuda.synchronize() 。这个函数会阻塞当前线程,直到所有 CUDA 核心完成当前队列中的所有操作。这一步确保在获取时间戳之前,所有 GPU 操作已经完成,从而保证时间戳的准确性。
torch.cuda.synchronize()
# 返回当前时间戳,使用 Python 的 time.time() 函数。这个函数返回自 Unix 纪元(1970年1月1日)以来的秒数。
return time.time()
# 这段代码实现了一个功能。获取 PyTorch 中准确的时间戳,特别是在涉及 GPU 计算时。具体功能如下。检查 CUDA 可用性:通过 torch.cuda.is_available() 检查是否有可用的 GPU。同步 CUDA 核心:如果 CUDA 可用,则调用 torch.cuda.synchronize() ,确保所有 GPU 操作完成。返回时间戳:使用 time.time() 返回当前时间戳。
# 使用场景 :
# 这个函数通常用于以下场景 :
# 性能测量 :在训练或推理过程中测量模型的运行时间。
# 调试 :在涉及 GPU 计算的代码中,确保时间戳的准确性。
# 基准测试 :在比较不同模型或算法的性能时,确保时间测量的可靠性。
# 通过 time_sync 函数,开发者可以轻松地获取准确的时间戳,从而更准确地测量和分析模型的性能。
# 为什么需要同步 CUDA 核心?
# 在使用 GPU 进行计算时,CUDA 操作是异步的。这意味着当调用 CUDA 函数时,操作会被排队执行,而 Python 线程不会等待操作完成。这可能导致在测量时间时出现不准确的情况,因为时间戳可能在 GPU 操作完成之前被记录。通过调用 torch.cuda.synchronize() ,可以确保所有 GPU 操作完成后再获取时间戳,从而保证时间测量的准确性。9.def fuse_conv_and_bn(conv, bn):
# 这段代码定义了一个名为 fuse_conv_and_bn 的函数,用于将卷积层和批量归一化层融合成一个卷积层。这种融合方法在推理时使用,可以减少计算量和参数数量,提高模型的推理效率。
# 定义了一个名为 fuse_conv_and_bn 的函数,它接受两个参数。
# 1.conv :一个卷积层,类型为 torch.nn.Conv2d 。
# 2.bn :一个批量归一化层,类型为 torch.nn.BatchNorm2d 。
def fuse_conv_and_bn(conv, bn):
# 融合 Conv2d() 和 BatchNorm2d() 层 https://tehnokv.com/posts/fusing-batchnorm-and-conv/。
"""Fuse Conv2d() and BatchNorm2d() layers https://tehnokv.com/posts/fusing-batchnorm-and-conv/."""
# 创建一个新的卷积层 fusedconv ,其参数与输入的卷积层 conv 相同,但添加了偏置项( bias=True )。
fusedconv = (
nn.Conv2d(
conv.in_channels,
conv.out_channels,
kernel_size=conv.kernel_size,
stride=conv.stride,
padding=conv.padding,
dilation=conv.dilation,
groups=conv.groups,
bias=True,
)
# 设置 fusedconv 的梯度计算为 False ,表示在推理时不需要计算梯度。
.requires_grad_(False)
# 将 fusedconv 移动到与 conv 相同的设备上。
.to(conv.weight.device)
)
# Prepare filters 准备滤波器。
# 将 卷积层的权重 conv.weight 重塑为形状 (conv.out_channels, -1) ,以便进行矩阵乘法。
w_conv = conv.weight.view(conv.out_channels, -1)
# 计算 批量归一化层的权重 w_bn ,其对角线元素为 bn.weight / sqrt(bn.eps + bn.running_var) 。
w_bn = torch.diag(bn.weight.div(torch.sqrt(bn.eps + bn.running_var)))
# 使用矩阵乘法 torch.mm(w_bn, w_conv) 将批量归一化层的权重与卷积层的权重相乘,得到融合后的权重。
# 将融合后的权重复制到 fusedconv.weight 中。
fusedconv.weight.copy_(torch.mm(w_bn, w_conv).view(fusedconv.weight.shape))
# Prepare spatial bias 准备空间偏置。
# 如果卷积层没有偏置项( conv.bias is None ),则创建一个零偏置向量 b_conv ,否则使用卷积层的偏置项 conv.bias 。
b_conv = torch.zeros(conv.weight.shape[0], device=conv.weight.device) if conv.bias is None else conv.bias
# 计算 批量归一化层的偏置项 b_bn ,其值为 bn.bias - bn.weight * bn.running_mean / sqrt(bn.running_var + bn.eps) 。
b_bn = bn.bias - bn.weight.mul(bn.running_mean).div(torch.sqrt(bn.running_var + bn.eps))
# 使用矩阵乘法 torch.mm(w_bn, b_conv.reshape(-1, 1)) 将批量归一化层的权重与卷积层的偏置项相乘,然后加上批量归一化层的偏置项 b_bn ,得到融合后的偏置项。
# 将融合后的偏置项复制到 fusedconv.bias 中。
fusedconv.bias.copy_(torch.mm(w_bn, b_conv.reshape(-1, 1)).reshape(-1) + b_bn)
# 返回融合后的卷积层 fusedconv 。
return fusedconv
# 这段代码定义了一个函数 fuse_conv_and_bn ,用于将卷积层和批量归一化层融合成一个卷积层。这种融合方法在推理时使用,可以减少计算量和参数数量,提高模型的推理效率。通过将卷积层的权重与批量归一化层的权重相乘,并将卷积层的偏置项与批量归一化层的偏置项相加,可以实现等效的特征提取,同时减少计算复杂度。这种融合方法通常用于构建高效的深度学习模型,适用于图像分类、目标检测等任务。
# 在批量归一化(Batch Normalization, BN)中, bn.running_mean 和 bn.running_var 是两个非常重要的属性,它们分别表示运行时的均值和方差。这些属性在训练和推理阶段有不同的作用。以下是它们的实际意义和用途 :
# bn.running_mean :
# 定义 : bn.running_mean 是批量归一化层在训练过程中计算的均值的移动平均值。它是一个运行时的统计量,用于在推理阶段替代小批量的均值。
# 作用 :
# 训练阶段 :在每个小批量中,BN层会计算当前小批量的均值,并使用动量(momentum)更新 running_mean 。
# 推理阶段 :在推理时,BN层使用 running_mean 作为均值,而不是当前小批量的均值,以确保推理结果的一致性和稳定性。
# bn.running_var :
# 定义 : bn.running_var 是批量归一化层在训练过程中计算的方差的移动平均值。它是一个运行时的统计量,用于在推理阶段替代小批量的方差。
# 作用 :
# 训练阶段 :在每个小批量中,BN层会计算当前小批量的方差,并使用动量(momentum)更新 running_var 。
# 推理阶段 :在推理时,BN层使用 running_var 作为方差,而不是当前小批量的方差,以确保推理结果的一致性和稳定性。
# 总结 :
# bn.running_mean :运行时的均值,用于在推理阶段替代小批量的均值。
# bn.running_var :运行时的方差,用于在推理阶段替代小批量的方差。
# 训练阶段 :在每个小批量中,BN层会计算当前小批量的均值和方差,并使用动量更新 running_mean 和 running_var 。
# 推理阶段 :在推理时,BN层使用 running_mean 和 running_var 进行归一化,以确保推理结果的一致性和稳定性。
# 通过这些运行时的统计量,批量归一化层可以在推理时提供更稳定和一致的归一化效果,从而提高模型的性能和泛化能力。
# 在批量归一化(Batch Normalization, BN)中,使用动量(momentum)更新 running_mean 和 running_var 是一种平滑统计量的方法,旨在减少小批量统计量的波动,使模型在训练过程中更加稳定。具体来说,动量更新是一种指数移动平均(Exponential Moving Average, EMA)的方法,它结合了当前小批量的统计量和之前累积的统计量。
# 动量更新的数学表达式 :
# 假设当前小批量的均值为 μ_B ,方差为 (σ_B)^2 ,动量为 momentum ,则 running_mean 和 running_var 的更新公式为:
# running_mean = momentum · running_mean+(1-momentum)·μ_B
# running_var = momentum · running_var+(1-momentum)·(σ_B)^2
# 动量更新的实际意义 :
# 平滑统计量 :动量更新通过结合当前小批量的统计量和之前累积的统计量,减少了小批量统计量的波动。这使得 running_mean 和 running_var 更加稳定,从而提高了模型的训练稳定性。
# 减少过拟合 :通过平滑统计量,模型对当前小批量的依赖减少,从而减少了过拟合的风险。这有助于模型在训练过程中更好地泛化到新的数据。
# 加速收敛 :动量更新使得 running_mean 和 running_var 能够更快地收敛到全局统计量,从而加速了模型的训练过程。
# 总结 :使用动量更新 running_mean 和 running_var 是一种平滑统计量的方法,通过结合当前小批量的统计量和之前累积的统计量,减少了小批量统计量的波动。这使得模型在训练过程中更加稳定,减少了过拟合的风险,并加速了模型的收敛。这种更新方法在批量归一化中被广泛使用,以提高模型的性能和泛化能力。10.def fuse_deconv_and_bn(deconv, bn):
# 这段代码定义了一个函数 fuse_deconv_and_bn ,用于将 ConvTranspose2d (反卷积层)和 BatchNorm2d (批量归一化层)合并为一个新的 ConvTranspose2d 层。
# 定义了一个函数 fuse_deconv_and_bn ,它接受两个参数。
# 1.deconv :一个 ConvTranspose2d 层。
# 2.bn :一个 BatchNorm2d 层。
def fuse_deconv_and_bn(deconv, bn):
# 融合 ConvTranspose2d() 和 BatchNorm2d() 层。
"""Fuse ConvTranspose2d() and BatchNorm2d() layers."""
# 创建一个新的 ConvTranspose2d 层 fuseddconv ,其参数与输入的 deconv 层一致,但将 bias 设置为 True 。这是因为融合后的层需要包含偏置项。
fuseddconv = (
nn.ConvTranspose2d(
deconv.in_channels,
deconv.out_channels,
kernel_size=deconv.kernel_size,
stride=deconv.stride,
padding=deconv.padding,
output_padding=deconv.output_padding,
dilation=deconv.dilation,
groups=deconv.groups,
bias=True,
)
# 调用 .requires_grad_(False) ,将新层的梯度计算关闭,使其在训练过程中不会更新参数。
.requires_grad_(False)
# 使用 .to(deconv.weight.device) 将新层移动到与 deconv 层相同的设备(CPU或GPU)上。
.to(deconv.weight.device)
)
# Prepare filters
# 获取 deconv 层的权重 deconv.weight ,并将其重塑为形状为 (deconv.out_channels, -1) 的二维张量。这一步是为了方便后续的矩阵运算。
w_deconv = deconv.weight.view(deconv.out_channels, -1)
# 计算 批量归一化层的权重矩阵 w_bn 。具体来说, bn.weight 是批量归一化的缩放参数, bn.running_var 是运行时的方差, bn.eps 是一个小的常数用于数值稳定性。
# bn.weight.div(torch.sqrt(bn.eps + bn.running_var)) 计算归一化后的缩放因子,然后通过 torch.diag 将其转换为对角矩阵。
w_bn = torch.diag(bn.weight.div(torch.sqrt(bn.eps + bn.running_var)))
# 使用矩阵乘法 torch.mm(w_bn, w_deconv) 将批量归一化的权重矩阵 w_bn 与反卷积层的权重矩阵 w_deconv 相乘。 将结果重塑为与 fuseddconv.weight 相同的形状,并将其复制到 fuseddconv.weight 中。这一步完成了权重的融合。
fuseddconv.weight.copy_(torch.mm(w_bn, w_deconv).view(fuseddconv.weight.shape))
# Prepare spatial bias
# 如果 deconv 层没有偏置项( deconv.bias is None ),则创建一个全零张量 b_conv ,其形状为 (deconv.weight.shape[1],) ,表示反卷积层的输入通道数。 如果 deconv 层有偏置项,则直接使用 deconv.bias 。
b_conv = torch.zeros(deconv.weight.shape[1], device=deconv.weight.device) if deconv.bias is None else deconv.bias
# 计算 批量归一化的偏置项 b_bn 。具体来说, bn.bias 是批量归一化的偏移参数, bn.running_mean 是运行时的均值。 公式 bn.bias - bn.weight.mul(bn.running_mean).div(torch.sqrt(bn.running_var + bn.eps)) 是 批量归一化偏置项的等效表达式 。
b_bn = bn.bias - bn.weight.mul(bn.running_mean).div(torch.sqrt(bn.running_var + bn.eps))
# 使用矩阵乘法 torch.mm(w_bn, b_conv.reshape(-1, 1)) 将 批量归一化的权重矩阵 w_bn 与 反卷积层的偏置项 b_conv 相乘。
# 将结果与 批量归一化的偏置项 b_bn 相加,并将最终结果复制到 fuseddconv.bias 中。这一步完成了偏置项的融合。
fuseddconv.bias.copy_(torch.mm(w_bn, b_conv.reshape(-1, 1)).reshape(-1) + b_bn)
# 返回融合后的 ConvTranspose2d 层 fuseddconv 。
return fuseddconv
# 这段代码实现了将 ConvTranspose2d (反卷积层)和 BatchNorm2d (批量归一化层)合并为一个新的 ConvTranspose2d 层的功能。通过矩阵运算,将批量归一化的权重和偏置项融入到反卷积层的权重和偏置项中,从而减少了模型的计算复杂度和参数数量。这种融合操作通常用于模型优化和推理加速。11.def model_info(model, detailed=False, verbose=True, imgsz=640):
# 这段代码定义了一个函数 model_info ,用于打印和返回模型的详细信息,包括参数数量、梯度数量、层数、每层的详细信息(如果需要)以及模型的计算量(FLOPs)。
# 定义了一个函数 model_info ,它接受以下参数 :
# 1.model :需要分析的模型。
# 2.detailed :布尔值,是否打印每层的详细信息,默认为 False 。
# 3.verbose :布尔值,是否打印信息,默认为 True 。
# 4.imgsz :输入图像的尺寸,用于计算 FLOPs,默认为 640 。
def model_info(model, detailed=False, verbose=True, imgsz=640):
# 逐层打印并返回详细的模型信息。
"""Print and return detailed model information layer by layer."""
# 如果 verbose 为 False 。
if not verbose:
# 则直接返回,不打印任何信息。
return
# 调用 get_num_params 函数计算 模型的总参数数量 ,并将其存储在变量 n_p 中。
n_p = get_num_params(model) # number of parameters
# 调用 get_num_gradients 函数计算模型的 可训练参数数量(即梯度数量) ,并将其存储在变量 n_g 中。
n_g = get_num_gradients(model) # number of gradients
# 通过 model.modules() 遍历模型的所有模块(层),并计算层数,存储在变量 n_l 中。
n_l = len(list(model.modules())) # number of layers
# 如果 detailed 为 True ,则打印每层的详细信息。
if detailed:
# 打印表头,包括列名和对齐方式。
# layer :层的编号。
# name :层的名称。
# gradient :是否计算梯度。
# parameters :参数数量。
# shape :参数的形状。
# mu :参数的均值。
# sigma :参数的标准差。
LOGGER.info(f"{'layer':>5}{'name':>40}{'gradient':>10}{'parameters':>12}{'shape':>20}{'mu':>10}{'sigma':>10}")
# named_parameters()
# named_parameters() 是 PyTorch 中 nn.Module 类的一个方法,它返回模型中所有参数的迭代器,每个参数都以其名称作为前缀。这个方法非常有用,因为它允许你访问和操作模型的每个参数,同时知道它们的名称,这在调试和分析模型时尤其有用。
# 参数说明 :
# prefix :一个字符串,用于指定返回的参数名称的前缀。默认为空字符串,即不添加任何前缀。
# recurse :一个布尔值,指示是否递归遍历所有子模块。默认为 True ,即递归遍历所有子模块。
# 返回值 :
# 一个迭代器,包含元组,每个元组包含两个元素:参数的名称和参数张量本身。
# 注意事项 :
# 参数名称是唯一的,并且包含了它们在模型中的路径,这有助于区分同名参数(例如,不同层的权重可能有不同的路径)。
# 如果模型中有大量的参数,使用 named_parameters() 方法可以有效地管理和访问它们。
# 当你想要对特定参数应用特定的操作或修改时, named_parameters() 方法尤其有用,因为它提供了参数的名称和值。
# 遍历模型的所有参数, model.named_parameters() 返回一个生成器,包含每层的名称和参数。
for i, (name, p) in enumerate(model.named_parameters()):
# 将参数名称中的 module_list. 替换为空字符串,以简化名称。
name = name.replace("module_list.", "")
# 打印每层的详细信息。
# i :层的编号。
# name :层的名称。
# p.requires_grad :是否计算梯度。
# p.numel() :参数数量。
# p.shape :参数的形状。
# p.mean() :参数的均值。
# p.std() :参数的标准差。
# p.dtype :参数的数据类型。
LOGGER.info(
f"{i:>5g}{name:>40s}{p.requires_grad!r:>10}{p.numel():>12g}{str(list(p.shape)):>20s}"
f"{p.mean():>10.3g}{p.std():>10.3g}{str(p.dtype):>15s}"
)
# 调用 get_flops 函数计算模型的 FLOPs(浮点运算次数)。 imgsz 可以是整数或列表,表示输入图像的尺寸。
flops = get_flops(model, imgsz) # imgsz may be int or list, i.e. imgsz=640 or imgsz=[640, 320]
# 检查模型是否已经融合(例如,是否将某些层合并),并设置变量 fused 。如果模型有 is_fused 属性且返回 True ,则 fused 为 " (fused)" ,否则为空字符串。
fused = " (fused)" if getattr(model, "is_fused", lambda: False)() else ""
# 如果计算了 FLOPs,则格式化为字符串,否则为空字符串。
fs = f", {flops:.1f} GFLOPs" if flops else ""
# 尝试获取模型的 YAML 文件路径。如果模型有 yaml_file 属性,则直接获取;否则尝试从模型的 yaml 属性中获取。
yaml_file = getattr(model, "yaml_file", "") or getattr(model, "yaml", {}).get("yaml_file", "")
# 从 YAML 文件路径中提取模型名称,并将 "yolo" 替换为 "YOLO" 。如果未找到 YAML 文件,则使用默认名称 "Model" 。
model_name = Path(yaml_file).stem.replace("yolo", "YOLO") or "Model"
# 打印模型的总结信息,包括 模型名称 、 层数 、 参数数量 、 梯度数量 以及 FLOPs(如果有) 。
LOGGER.info(f"{model_name} summary{fused}: {n_l:,} layers, {n_p:,} parameters, {n_g:,} gradients{fs}")
# 返回模型的 层数 、 参数数量 、 梯度数量 和 FLOPs 。
return n_l, n_p, n_g, flops
# 这段代码实现了一个功能。打印和返回模型的详细信息,包括。参数数量:模型的总参数数量。梯度数量:模型的可训练参数数量。层数:模型的总层数。每层的详细信息(如果需要):包括层的编号、名称、是否计算梯度、参数数量、参数形状、均值和标准差。FLOPs:模型的浮点运算次数,用于评估模型的计算复杂度。模型名称:从 YAML 文件中提取的模型名称。这种函数通常用于模型分析和调试,帮助开发者了解模型的结构和性能。12.def get_num_params(model):
# 这段代码定义了一个函数 get_num_params ,用于计算并返回模型的总参数数量。
# 定义了一个函数 get_num_params ,它接受一个参数。
# 1.model :需要计算参数数量的模型。
def get_num_params(model):
# 返回 YOLO 模型中的参数总数。
"""Return the total number of parameters in a YOLO model."""
# model.parameters() :返回模型中所有参数的生成器。
# x.numel() :计算每个参数张量中的元素数量(即该参数的总元素数)。
# sum(...) :对所有参数的元素数量求和,得到模型的总参数数量。
return sum(x.numel() for x in model.parameters())
# 这段代码实现了一个功能。计算并返回模型的总参数数量。具体功能如下。参数遍历:通过 model.parameters() 遍历模型中的所有参数。元素数量计算:使用 x.numel() 计算每个参数张量中的元素数量。总参数数量:通过 sum(...) 将所有参数的元素数量相加,得到模型的总参数数量。这种函数通常用于模型分析,帮助开发者了解模型的大小和复杂度。例如,在深度学习中,参数数量较多的模型通常需要更多的计算资源和数据来训练,同时也更容易过拟合。通过计算参数数量,可以对模型的规模有一个直观的了解。13.def get_num_gradients(model):
# 这段代码定义了一个函数 get_num_gradients ,用于计算并返回模型中具有梯度的参数数量。
# 定义了一个函数 get_num_gradients ,它接受一个参数。
# 1.model :需要计算具有梯度的参数数量的模型。
def get_num_gradients(model):
# 返回 YOLO 模型中具有梯度的参数总数。
"""Return the total number of parameters with gradients in a YOLO model."""
# model.parameters() :返回模型中所有参数的生成器。
# x.requires_grad :检查每个参数是否需要计算梯度。如果 x.requires_grad 为 True ,则该参数在训练过程中会计算梯度。
# x.numel() :计算每个参数张量中的元素数量(即该参数的总元素数)。
# sum(...) :对所有具有梯度的参数的元素数量求和,得到模型中具有梯度的参数总数。
return sum(x.numel() for x in model.parameters() if x.requires_grad)
# 这段代码实现了一个功能。计算并返回模型中具有梯度的参数数量。具体功能如下。参数遍历:通过 model.parameters() 遍历模型中的所有参数。梯度检查:通过 x.requires_grad 筛选出需要计算梯度的参数。元素数量计算:使用 x.numel() 计算每个参数张量中的元素数量。总梯度参数数量:通过 sum(...) 将所有具有梯度的参数的元素数量相加,得到模型中具有梯度的参数总数。
# 为什么需要计算具有梯度的参数数量?
# 在深度学习中,模型的参数可以分为两类 :
# 可训练参数 :这些参数在训练过程中会更新,通常用于学习数据的特征。它们的 requires_grad 属性为 True 。
# 不可训练参数 :这些参数在训练过程中不会更新,例如预训练模型中冻结的参数,或者一些用于归一化的参数(如批量归一化层的运行时统计量)。它们的 requires_grad 属性为 False 。
# 计算具有梯度的参数数量可以帮助开发者了解模型的可训练部分的规模,这对于模型的训练和优化非常重要。
# 例如 :
# 模型复杂度 :具有梯度的参数数量越多,模型的复杂度越高,训练难度也越大。
# 模型优化 :在某些情况下,可能需要冻结部分参数以减少计算量或避免过拟合。
# 模型评估 :了解可训练参数的数量可以帮助评估模型的灵活性和适应性。
# 通过 get_num_gradients 函数,开发者可以快速获取模型中可训练参数的数量,从而更好地理解和优化模型。14.def model_info_for_loggers(trainer):
# 这段代码定义了一个名为 model_info_for_loggers 的函数,用于收集模型的相关信息并返回一个包含这些信息的字典,这些信息可以用于日志记录或其他用途。
# 定义了一个函数 model_info_for_loggers ,它接受一个参数。
# 1.trainer :一个对象,包含了模型训练和验证的相关信息。
def model_info_for_loggers(trainer):
# 返回包含有用模型信息的模型信息字典。
"""
Return model info dict with useful model information.
Example:
YOLOv8n info for loggers
```python
results = {
"model/parameters": 3151904,
"model/GFLOPs": 8.746,
"model/speed_ONNX(ms)": 41.244,
"model/speed_TensorRT(ms)": 3.211,
"model/speed_PyTorch(ms)": 18.755,
}
```
"""
# 检查 trainer.args.profile 是否为 True 。如果为 True ,表示需要对模型进行性能分析,包括 ONNX 和 TensorRT 的推理时间。
if trainer.args.profile: # profile ONNX and TensorRT times
# 如果需要进行性能分析,从 ultralytics.utils.benchmarks 模块中导入 ProfileModels 类。 ultralytics 是一个常用的计算机视觉库, ProfileModels 用于分析模型的性能。
from ultralytics.utils.benchmarks import ProfileModels
# 使用 ProfileModels 类对 trainer.last (最近一次训练的模型)进行性能分析,并将结果存储在 results 中。 device 参数指定了运行设备(例如 CPU 或 GPU)。 profile() 方法返回一个列表,这里取第一个元素(即第一个模型的分析结果)。
results = ProfileModels([trainer.last], device=trainer.device).profile()[0]
# 从 results 字典中移除键为 "model/name" 的条目。这可能是因为该信息不需要记录,或者已经在其他地方记录过。
results.pop("model/name")
# 如果 trainer.args.profile 为 False ,则进入 else 分支。这里只返回与 PyTorch 模型相关的推理时间信息,而不是进行完整的性能分析。
else: # only return PyTorch times from most recent validation
# 初始化一个字典 results ,用于存储模型的相关信息。
results = {
# 调用 get_num_params 函数,计算 trainer.model 的参数数量,并将其存储在字典中,键为 "model/parameters" 。
# def get_num_params(model): -> 用于计算并返回模型的总参数数量。对所有参数的元素数量求和,得到模型的总参数数量。 -> return sum(x.numel() for x in model.parameters())
"model/parameters": get_num_params(trainer.model),
# 调用 get_flops 函数,计算模型的浮点运算量(以 GFLOPs 为单位),并将其四舍五入到小数点后三位,存储在字典中,键为 "model/GFLOPs" 。
# def get_flops(model, imgsz=640):
# -> 用于计算并返回 YOLO 模型的浮点运算次数(FLOPs)。根据输入图像的实际尺寸调整 FLOPs。使用 thop.profile 函数计算模型在实际输入张量上的 FLOPs,并将其转换为 GFLOPs。如果在计算 FLOPs 时发生任何异常。则返回 0.0 。
# -> return flops * imgsz[0] / stride * imgsz[1] / stride # imgsz GFLOPs
# -> return thop.profile(deepcopy(model), inputs=[im], verbose=False)[0] / 1e9 * 2 # imgsz GFLOPs
# -> return 0.0
"model/GFLOPs": round(get_flops(trainer.model), 3),
}
# 从 trainer.validator.speed 中获取最近一次验证阶段的 PyTorch 推理时间(单位为毫秒),四舍五入到小数点后三位,并将其存储在字典中,键为 "model/speed_PyTorch(ms)" 。
results["model/speed_PyTorch(ms)"] = round(trainer.validator.speed["inference"], 3)
# 返回包含模型信息的字典 results 。
return results
# 这段代码的作用是根据 trainer.args.profile 的值,动态地选择收集模型信息的方式。如果 profile 为 True ,则使用 ProfileModels 对模型进行详细的性能分析(包括 ONNX 和 TensorRT 的推理时间)。如果 profile 为 False ,则只收集模型的参数数量、浮点运算量(GFLOPs)以及最近一次验证阶段的 PyTorch 推理时间。这些信息可以用于日志记录、性能评估或其他分析目的。代码的设计考虑了灵活性和效率,能够根据不同的需求选择合适的分析方式。15.def get_flops(model, imgsz=640):
# 这段代码定义了一个函数 get_flops ,用于计算并返回 YOLO 模型的浮点运算次数(FLOPs)。FLOPs 是衡量模型计算复杂度的重要指标,通常以 GFLOPs(十亿次浮点运算)为单位。
# 定义了一个函数 get_flops ,它接受两个参数。
# 1.model :需要计算 FLOPs 的模型。
# 2.imgsz :输入图像的尺寸,默认为 640 。可以是整数或列表,例如 640 或 [640, 320] 。
def get_flops(model, imgsz=640):
# 返回 YOLO 模型的 FLOP。
"""Return a YOLO model's FLOPs."""
# 使用 try 块来捕获可能的异常,确保函数的鲁棒性。
try:
# 调用 de_parallel 函数,将模型从并行模式(如果有)转换为单个模型。这一步是为了确保后续操作可以在单个模型上进行。
model = de_parallel(model)
# 获取模型的第一个参数张量,用于获取输入通道数等信息。
p = next(model.parameters())
# 如果 imgsz 是整数或浮点数,则将其扩展为一个列表 [imgsz, imgsz] ,表示图像的宽度和高度相同。
if not isinstance(imgsz, list):
imgsz = [imgsz, imgsz] # expand if int/float
# 再次使用 try 块,尝试使用步长(stride)来计算 FLOPs。
try:
# Use stride size for input tensor
# 如果模型有 stride 属性,则获取最大步长,并确保其至少为 32。 如果模型没有 stride 属性,则默认步长为 32。
stride = max(int(model.stride.max()), 32) if hasattr(model, "stride") else 32 # max stride
# 创建一个虚拟输入张量 im ,其形状为 (1, p.shape[1], stride, stride) ,表示批量大小为 1,通道数为 p.shape[1] ,高度和宽度均为 stride 。张量的设备与模型的第一个参数相同。
im = torch.empty((1, p.shape[1], stride, stride), device=p.device) # input image in BCHW format
# flops, params = thop.profile(model, inputs=(inputs,), verbose=False)
# thop (TensorHoard of PyTorch)是一个用于计算PyTorch模型的参数量和浮点运算次数(FLOPs)的库。 thop.profile 函数是这个库中的核心功能,它提供了一个简单的方式来评估模型的计算复杂度。
# 参数说明 :
# model :要分析的PyTorch模型,它应该是一个继承自 torch.nn.Module 的实例。
# inputs :模型的输入数据,可以是一个张量或者一个张量元组。这些输入数据应该与模型的预期输入尺寸相匹配。
# verbose (可选):一个布尔值,用于控制是否打印详细的分析信息。默认为 False 。
# 返回值 :
# flops :模型的浮点运算次数,以浮点数形式返回,单位通常是 FLOPs(每秒浮点运算次数)。
# params :模型的参数量,以整数形式返回,单位通常是百万(M)。
# 注意事项 :
# thop.profile 函数需要模型的所有层都支持 FLOPs 计算。对于自定义层,可能需要实现额外的逻辑来正确计算 FLOPs。
# 如果模型中包含不支持的层或者操作, thop.profile 可能会抛出错误或者返回不准确的结果。
# thop 库需要与 PyTorch 兼容,因此在使用之前请确保安装了正确版本的 thop 。
# thop.profile 函数是一个非常有用的工具,可以帮助研究人员和开发人员理解模型的计算成本,从而在设计和优化模型时做出更明智的决策。
# 使用 thop.profile 函数计算模型在虚拟输入张量上的 FLOPs。
# deepcopy(model) :复制模型以避免修改原始模型。
# inputs=[im] :指定输入张量。
# verbose=False :不打印详细信息。
# thop.profile(...)[0] :返回计算的 FLOPs。
# / 1e9 :将 FLOPs 转换为 GFLOPs。
# * 2 :根据某些计算方式,FLOPs 可能需要乘以 2。
flops = thop.profile(deepcopy(model), inputs=[im], verbose=False)[0] / 1e9 * 2 # stride GFLOPs
# 根据输入图像的实际尺寸调整 FLOPs。公式为 : imgsz GFLOPs = stride GFLOPs × imgaesz[0]/stride × imgaesz[1]/stride 。
return flops * imgsz[0] / stride * imgsz[1] / stride # imgsz GFLOPs
# 如果使用步长计算 FLOPs 失败,则尝试使用实际图像尺寸计算 FLOPs。
except Exception:
# Use actual image size for input tensor (i.e. required for RTDETR models)
# 创建一个虚拟输入张量 im ,其形状为 (1, p.shape[1], imgsz[0], imgsz[1]) ,表示批量大小为 1,通道数为 p.shape[1] ,高度和宽度分别为 imgsz[0] 和 imgsz[1] 。
im = torch.empty((1, p.shape[1], *imgsz), device=p.device) # input image in BCHW format
# 使用 thop.profile 函数计算模型在实际输入张量上的 FLOPs,并将其转换为 GFLOPs。
return thop.profile(deepcopy(model), inputs=[im], verbose=False)[0] / 1e9 * 2 # imgsz GFLOPs
# 如果在计算 FLOPs 时发生任何异常。
except Exception:
# 则返回 0.0 。
return 0.0
# 这段代码实现了一个功能。计算并返回 YOLO 模型的 FLOPs。具体功能如下。模型准备:将模型从并行模式转换为单个模型。输入张量创建:如果模型有步长信息,则使用步长大小创建虚拟输入张量。如果模型没有步长信息,则使用实际图像尺寸创建输入张量。FLOPs 计算:使用 thop.profile 函数计算模型的 FLOPs。根据输入图像的实际尺寸调整 FLOPs。异常处理:如果在计算过程中发生任何异常,则返回 0.0 。这种函数通常用于模型分析和优化,帮助开发者了解模型的计算复杂度,从而选择合适的硬件或优化策略。
# def get_flops(model, imgsz=640):
# -> 用于计算并返回 YOLO 模型的浮点运算次数(FLOPs)。根据输入图像的实际尺寸调整 FLOPs。使用 thop.profile 函数计算模型在实际输入张量上的 FLOPs,并将其转换为 GFLOPs。如果在计算 FLOPs 时发生任何异常。则返回 0.0 。
# -> return flops * imgsz[0] / stride * imgsz[1] / stride # imgsz GFLOPs
# -> return thop.profile(deepcopy(model), inputs=[im], verbose=False)[0] / 1e9 * 2 # imgsz GFLOPs
# -> return 0.016.def get_flops_with_torch_profiler(model, imgsz=640):
# 这段代码定义了一个函数 get_flops_with_torch_profiler ,用于计算模型的浮点运算量(FLOPs)。它使用 PyTorch 的内置性能分析工具 torch.profiler 来实现,而不是依赖于外部库(如 thop )。
# 定义了一个函数 get_flops_with_torch_profiler ,接受两个参数。
# 1.model :需要计算 FLOPs 的模型。
# 2.imgsz :输入图像的尺寸,默认值为 640。可以是一个整数(表示正方形图像的边长),也可以是一个列表(表示宽和高)。
def get_flops_with_torch_profiler(model, imgsz=640):
# 计算模型 FLOP(thop 包替代品,但不幸的是速度慢了 2-10 倍)。
"""Compute model FLOPs (thop package alternative, but 2-10x slower unfortunately)."""
# 检查是否安装了 PyTorch 2.0 或更高版本。 torch.profiler 是在 PyTorch 2.0 中引入的,如果版本低于 2.0,直接返回 0.0 。
if not TORCH_2_0: # torch profiler implemented in torch>=2.0
# 如果 PyTorch 版本低于 2.0,返回 0.0 ,表示无法计算 FLOPs。
return 0.0
# 调用 de_parallel 函数(假设已定义)来处理模型的并行化。如果模型是通过 DataParallel 或 DistributedDataParallel 包装的, de_parallel 会提取原始模型。
# def de_parallel(model): -> 用于将并行化的模型转换为单 GPU 模型。 -> return model.module if is_parallel(model) else model
model = de_parallel(model)
# 获取模型的第一个 参数张量 p 。这主要用于获取输入张量的通道数( p.shape[1] )。
p = next(model.parameters())
# 检查 imgsz 是否为列表。如果不是,将其转换为一个列表 [imgsz, imgsz] ,表示输入图像为正方形。
if not isinstance(imgsz, list):
# 将 imgsz 转换为列表,确保后续代码可以正确处理宽和高的值。
imgsz = [imgsz, imgsz] # expand if int/float
# 开始一个 try 块,尝试使用模型的步长(stride)来创建输入张量。这通常用于某些模型(如 YOLO),其输入尺寸需要与模型的步长对齐。
try:
# Use stride size for input tensor
# 计算模型的步长。 如果模型有 stride 属性,取其最大值并确保至少为 32,然后乘以 2。 如果模型没有 stride 属性,直接使用 64 作为步长。
stride = (max(int(model.stride.max()), 32) if hasattr(model, "stride") else 32) * 2 # max stride
# 创建一个空的输入张量 im ,形状为 (1, C, stride, stride) ,其中 C 是模型输入的通道数, stride 是计算得到的步长。张量的设备与模型参数一致。
im = torch.empty((1, p.shape[1], stride, stride), device=p.device) # input image in BCHW format
# 使用 torch.profiler.profile 上下文管理器,启用 FLOPs 计算。
with torch.profiler.profile(with_flops=True) as prof:
# 将输入张量 im 传递给模型,运行一次前向传播。
model(im)
# 从分析器中提取 FLOPs 数据。 prof.key_averages() 返回每个操作的统计信息。 x.flops 是每个操作的 FLOPs 数量。 将所有操作的 FLOPs 求和,并除以 1e9 转换为 GFLOPs。
flops = sum(x.flops for x in prof.key_averages()) / 1e9
# 将计算得到的 FLOPs 按比例缩放到实际输入尺寸( imgsz )。这是因为初始输入张量的尺寸是基于步长计算的,需要调整到实际输入尺寸。
flops = flops * imgsz[0] / stride * imgsz[1] / stride # 640x640 GFLOPs
# 如果在 try 块中发生异常,进入 except 块。这通常是因为某些模型(如 RTDETR)需要使用实际的输入尺寸,而不是基于步长的尺寸。
except Exception:
# Use actual image size for input tensor (i.e. required for RTDETR models)
# 使用实际的输入尺寸 imgsz 创建输入张量 im 。
im = torch.empty((1, p.shape[1], *imgsz), device=p.device) # input image in BCHW format
# 再次使用 torch.profiler.profile 上下文管理器。
with torch.profiler.profile(with_flops=True) as prof:
# 运行模型的前向传播。
model(im)
# 提取并计算 FLOPs。
flops = sum(x.flops for x in prof.key_averages()) / 1e9
# 返回计算得到的 FLOPs(以 GFLOPs 为单位)。
return flops
# 这段代码实现了一个功能:使用 PyTorch 的 torch.profiler 工具计算模型的浮点运算量(FLOPs)。它具有以下特点。兼容性:仅在 PyTorch 2.0 及以上版本中有效。灵活性:支持两种输入张量的创建方式:基于模型步长(stride)的输入张量(适用于 YOLO 等模型)。基于实际输入尺寸的张量(适用于 RTDETR 等模型)。性能:虽然使用 torch.profiler 计算 FLOPs 比外部库(如 thop )慢 2-10 倍,但它完全依赖于 PyTorch 内置工具,无需额外安装依赖。该函数可以用于模型性能分析,帮助开发者了解模型的计算复杂度。17.def initialize_weights(model):
# 这段代码定义了一个函数 initialize_weights ,用于初始化模型的权重和一些层的参数。
# 定义了一个函数 initialize_weights ,它接受一个参数。
# 1.model :需要初始化权重的神经网络模型。
def initialize_weights(model):
# 将模型权重初始化为随机值。
"""Initialize model weights to random values."""
# 通过 model.modules() 遍历模型中的所有模块(层)。 model.modules() 返回一个生成器,包含模型中所有的子模块。
for m in model.modules():
# 获取当前模块 m 的类型,并将其存储在变量 t 中。这一步用于判断当前模块的类型,以便根据类型进行不同的初始化操作。
t = type(m)
# 如果当前模块是 nn.Conv2d (二维卷积层),则执行 pass ,即跳过当前模块的初始化操作。
if t is nn.Conv2d:
# 注释部分 nn.init.kaiming_normal_(m.weight, mode='fan_out', nonlinearity='relu') 是一种常见的卷积层权重初始化方法,使用 He 初始化方法,适用于 ReLU 激活函数。这里被注释掉了,说明作者可能在调试阶段暂时禁用了这一部分。
pass # nn.init.kaiming_normal_(m.weight, mode='fan_out', nonlinearity='relu')
# 如果当前模块是 nn.BatchNorm2d (二维批量归一化层),则修改其参数。
elif t is nn.BatchNorm2d:
# 将 eps 参数设置为 1e-3 ,这是一个用于数值稳定的小常数。
m.eps = 1e-3
# 将 momentum 参数设置为 0.03 ,这是批量归一化层的动量参数,用于控制运行时统计量的更新速度。
m.momentum = 0.03
# 如果当前模块是激活函数层(如 nn.Hardswish 、 nn.LeakyReLU 、 nn.ReLU 、 nn.ReLU6 或 nn.SiLU ),则将 inplace 参数设置为 True 。
elif t in {nn.Hardswish, nn.LeakyReLU, nn.ReLU, nn.ReLU6, nn.SiLU}:
# inplace=True 表示激活函数将直接在输入张量上进行操作,而不是创建一个新的张量,从而节省内存。
m.inplace = True
# 这段代码定义了一个函数 initialize_weights ,用于初始化模型的权重和某些层的参数。具体功能包括。卷积层:目前没有进行初始化操作,但注释部分提到了 He 初始化方法,适用于 ReLU 激活函数。批量归一化层:将 eps 设置为 1e-3 ,将 momentum 设置为 0.03 ,以调整批量归一化层的数值稳定性和统计量更新速度。激活函数层:将激活函数的 inplace 参数设置为 True ,以节省内存。这种初始化方式通常用于优化模型的训练过程,尤其是在使用特定激活函数或批量归一化层时。18.def scale_img(img, ratio=1.0, same_shape=False, gs=32):
# 这段代码定义了一个函数 scale_img ,用于对图像张量进行缩放和填充,同时可以选择是否保持原始宽高比以及是否填充到指定的步长( gs )的倍数。
# 定义了一个函数 scale_img ,它接受以下参数 :
# 1.img :输入的图像张量,形状为 (batch_size, channels, height, width) 。
# 2.ratio :缩放比例,默认为 1.0 ,表示不缩放。
# 3.same_shape :布尔值,是否保持原始宽高比,默认为 False 。
# 4.gs :填充步长,默认为 32 ,表示填充后的尺寸必须是 32 的倍数。
def scale_img(img, ratio=1.0, same_shape=False, gs=32):
# 缩放并填充图像张量,可选择保持纵横比并填充为 gs 倍数。
"""Scales and pads an image tensor, optionally maintaining aspect ratio and padding to gs multiple."""
# 如果缩放比例 ratio 为 1.0 。
if ratio == 1.0:
# 则直接返回原始图像,因为不需要缩放。
return img
# 获取输入图像的高度 h 和宽度 w 。 img.shape[2:] 表示从张量的第三维开始取值,即高度和宽度。
h, w = img.shape[2:]
# 根据缩放比例 ratio 计算新的尺寸 (new_height, new_width) 。
s = (int(h * ratio), int(w * ratio)) # new size
# torch.nn.functional.interpolate(input, size=None, scale_factor=None, mode='nearest', align_corners=None, recompute_scale_factor=None, antialiasing=False)
# 在PyTorch中, F.interpolate 函数是 torch.nn.functional.interpolate 的别名,它用于对图像或特征图进行上采样(放大)或下采样(缩小)。这个函数非常灵活,支持多种插值方法,可以用于深度学习模型中的特征图尺寸调整。
# 参数解释 :
# input :需要进行插值的输入张量,通常是一个 3D(N, C, L)或 4D(N, C, H, W)或 5D(N, C, D, H, W)张量, 其中 N 是批次大小,C 是通道数,L、H、W、D 分别是长度、高度、宽度和深度。
# size :目标输出尺寸,可以是整数或者元组。如果为 None ,则使用 scale_factor 来计算输出尺寸。
# scale_factor :缩放因子,可以是一个数字或包含三个数字的元组,对应于各个维度的缩放因子。如果为 None ,则使用 size 参数。
# mode :插值模式,常用的有 :
# 'nearest' :最近邻插值。
# 'linear' :线性插值(仅适用于1维数据)。
# 'bilinear' :双线性插值(适用于2维数据,如图像)。
# 'bicubic' :双三次插值(适用于2维数据,比双线性更平滑)。
# 'trilinear' :三线性插值(适用于3维数据)。
# align_corners :用于双线性和三线性插值。如果为 True,输入和输出张量的角点将对齐。默认为 False。
# recompute_scale_factor : 重新计算 scale_factor 的布尔值或 None。如果设置为 True,则基于计算的输出大小重新计算 scale_factor。
# antialiasing :如果为 True 并且 mode 是 ‘bilinear’,‘bicubic’ 或 ‘trilinear’ 时,会应用抗锯齿滤波。默认为 False。
# 返回值:
# 返回插值后的张量,大小和形状由 size 或 scale_factor 确定。
# 使用 torch.nn.functional.interpolate 函数对图像进行双线性插值缩放。
# img :输入图像张量。
# size=s :指定新的尺寸。
# mode="bilinear" :使用双线性插值。
# align_corners=False :避免插值时的角点对齐问题。
img = F.interpolate(img, size=s, mode="bilinear", align_corners=False) # resize
# 如果 same_shape 为 False ,则根据步长 gs 调整图像的尺寸。
if not same_shape: # pad/crop img
# 使用 math.ceil 确保新的尺寸是 gs 的倍数。
# x * ratio / gs :将原始尺寸缩放后除以步长。
# math.ceil(...) :向上取整。
# * gs :再乘以步长,确保结果是 gs 的倍数。
h, w = (math.ceil(x * ratio / gs) * gs for x in (h, w))
# torch.nn.functional.pad(input, pad, mode='constant', value=0)
# F.pad 是 PyTorch 中的一个函数,用于对输入的张量(tensor)进行填充(padding)。这个函数非常灵活,允许你在不同的维度上应用不同大小的填充。
# 参数说明 :
# input ( torch.Tensor ) : 需要被填充的输入张量。
# pad ( int 或 tuple ) : 指定填充的大小。
# 如果是 int ,表示在所有边界上应用相同的填充大小。
# 如果是 tuple ,应该遵循 (左, 右, 上, 下) 的顺序,对于多维数据,可以扩展为 (左, 右, 上, 下, 前, 后) 。
# mode ( str , 可选) : 指定填充的模式。
# 'constant' : 常数填充,默认值,使用 value 参数指定的值进行填充。
# 'reflect' : 反射填充,类似于图像处理中的反射效果。
# 'replicate' : 复制边缘值进行填充。
# value ( float 或 int , 可选) : 当 mode 为 'constant' 时,用于指定填充的常数值,默认为 0。
# 返回值 :
# 返回一个新的张量,该张量是输入张量经过指定填充后的结果。
# torch.nn.functional.pad 函数在深度学习中非常有用,尤其是在需要对输入数据进行预处理或在自定义层中调整张量尺寸时。
# 使用 torch.nn.functional.pad 函数对图像进行填充。
# img :缩放后的图像张量。
# [0, w - s[1], 0, h - s[0]] :填充的边界,格式为 [left, right, top, bottom] 。
# value=0.447 :填充的值,这里使用了 ImageNet 数据集的均值(0.447)。
return F.pad(img, [0, w - s[1], 0, h - s[0]], value=0.447) # value = imagenet mean
# 这段代码实现了一个功能。对图像张量进行缩放和填充,同时可以选择是否保持原始宽高比以及是否填充到指定步长的倍数。具体功能如下。缩放:根据指定的缩放比例 ratio ,对图像进行双线性插值缩放。填充:根据步长 gs ,调整图像的尺寸,并使用指定的值(如 ImageNet 均值)进行填充。保持宽高比:如果 same_shape 为 False ,则在缩放后调整图像尺寸,确保填充后的尺寸是 gs 的倍数。这种函数通常用于图像预处理,特别是在深度学习中,需要将图像调整到合适的尺寸以适应模型的输入要求。19.def copy_attr(a, b, include=(), exclude=()):
# 这段代码定义了一个名为 copy_attr 的函数,用于将一个对象 b 的属性复制到另一个对象 a 中。它还提供了选项来包含或排除某些属性。
# 定义了一个函数 copy_attr ,接受四个参数。
# a :目标对象,属性将被复制到这个对象中。
# b :源对象,属性将从这个对象中复制。
# include (可选,默认为空元组) :一个包含需要复制的属性名称的元组。
# exclude (可选,默认为空元组) :一个包含需要排除的属性名称的元组。
def copy_attr(a, b, include=(), exclude=()):
# 将属性从对象“b”复制到对象“a”,并可选择包含/排除某些属性。
"""Copies attributes from object 'b' to object 'a', with options to include/exclude certain attributes."""
# 遍历源对象 b 的所有属性。 b.__dict__ 是一个字典,包含了对象 b 的所有属性及其值。 items() 方法返回一个包含键值对的迭代器。
for k, v in b.__dict__.items():
# 这一行是条件判断,用于 决定是否跳过当前属性 。 如果 include 不为空且属性名 k 不在 include 中,则跳过。 如果属性名 k 以 _ 开头(表示私有属性),则跳过。 如果属性名 k 在 exclude 中,则跳过。
if (len(include) and k not in include) or k.startswith("_") or k in exclude:
# 如果满足上述条件,跳过当前属性,继续下一次循环。
continue
# 如果不满足上述条件,进入 else 分支。
else:
# 使用 setattr 函数将属性 k 的值 v 设置到目标对象 a 中。 setattr(a, k, v) 等价于 a.k = v 。
setattr(a, k, v)
# 这段代码实现了一个灵活的属性复制功能,允许开发者将一个对象的属性复制到另一个对象中,同时支持以下功能。选择性复制:通过 include 参数,可以指定只复制某些特定的属性。排除某些属性:通过 exclude 参数,可以指定某些不需要复制的属性。跳过私有属性:默认会跳过以 _ 开头的私有属性,避免复制内部实现细节。这种设计使得函数非常通用,适用于多种场景,例如:在对象之间传递配置参数。从一个对象继承部分属性到另一个对象。清理或过滤对象的属性。通过灵活使用 include 和 exclude 参数,开发者可以精确控制哪些属性需要被复制,哪些需要被忽略。
# def copy_attr(a, b, include=(), exclude=()): -> 用于将一个对象 b 的属性复制到另一个对象 a 中。它还提供了选项来包含或排除某些属性。使用 setattr 函数将属性 k 的值 v 设置到目标对象 a 中。 setattr(a, k, v) 等价于 a.k = v 。20.def get_latest_opset():
# 这段代码定义了一个函数 get_latest_opset ,用于获取当前 PyTorch 版本支持的次新(second-most recent)ONNX opset 版本。它根据 PyTorch 的版本动态调整返回的 opset 版本,以确保兼容性和成熟度。
# 定义了一个函数 get_latest_opset ,该函数没有参数,目的是返回一个适合当前 PyTorch 版本的 ONNX opset 版本号。
def get_latest_opset():
# 返回此版本的 PyTorch 支持的第二个最新的 ONNX opset 版本,并根据成熟度进行调整。
"""Return the second-most recent ONNX opset version supported by this version of PyTorch, adjusted for maturity."""
# 检查当前 PyTorch 版本是否大于或等于 1.13。 TORCH_1_13 是一个已经定义的布尔变量,用于判断版本。
if TORCH_1_13:
# If the PyTorch>=1.13, dynamically compute the latest opset minus one using 'symbolic_opset'
# 如果 PyTorch 版本 >= 1.13,动态计算次新 opset 版本。
# vars(torch.onnx) 获取 torch.onnx 模块中所有属性的字典。
# 使用列表推导式,筛选出属性名中包含 "symbolic_opset" 的键。
# 提取这些键的后缀数字(假设键名格式为 "symbolic_opsetX" ,其中 X 是 opset 版本号)。
# 使用 max 函数找到最大的 opset 版本号,并减去 1,返回次新版本。
return max(int(k[14:]) for k in vars(torch.onnx) if "symbolic_opset" in k) - 1
# Otherwise for PyTorch<=1.12 return the corresponding predefined opset
# 如果 PyTorch 版本 < 1.13,提取 torch.onnx.producer_version 的主版本号和次版本号(例如 "2.3" )。 rsplit(".", 1) 从右侧分割字符串,取第一个部分。
version = torch.onnx.producer_version.rsplit(".", 1)[0] # i.e. '2.3'
# 根据提取的版本号,从预定义的字典中查找对应的 opset 版本。 字典中定义了不同 PyTorch 版本对应的 opset 版本。 如果版本号不在字典中,返回默认值 12 。
return {"1.12": 15, "1.11": 14, "1.10": 13, "1.9": 12, "1.8": 12}.get(version, 12)
# 这段代码实现了一个功能:根据当前 PyTorch 版本动态返回一个合适的 ONNX opset 版本号。它的主要特点包括。动态计算(PyTorch >= 1.13):对于较新的 PyTorch 版本(>=1.13),通过分析 torch.onnx 模块中的属性动态计算次新 opset 版本。这种方法可以适应未来版本的变化,而无需手动更新代码。预定义版本(PyTorch <= 1.12):对于较旧的 PyTorch 版本(<=1.12),使用预定义的字典直接返回对应的 opset 版本。这种方法简单直接,适用于已知的版本。兼容性和成熟度调整:函数返回的是次新 opset 版本(而不是最新版本),这可能是为了确保兼容性和成熟度。次新版本通常经过更广泛的测试,更适合实际使用。这种设计使得函数能够灵活适应不同版本的 PyTorch,同时确保返回的 opset 版本既符合要求又具有较高的成熟度。21.def intersect_dicts(da, db, exclude=()):
# 这段代码定义了一个函数 intersect_dicts ,用于从两个字典中提取交集部分的键值对,并排除指定的键。
# 定义了一个函数 intersect_dicts ,它接受三个参数。
# 1.da :第一个字典,从中提取键值对。
# 2.db :第二个字典,用于检查键是否存在以及形状是否匹配。
# 3.exclude :一个可选的元组,包含需要排除的键,默认为空元组 () 。
def intersect_dicts(da, db, exclude=()):
# 使用 da 值返回具有匹配形状的相交键的字典,不包括“排除”键。
"""Returns a dictionary of intersecting keys with matching shapes, excluding 'exclude' keys, using da values."""
# 这是一个字典推导式,用于构建结果字典。
# 遍历 da 中的每个键值对 (k, v) :
# k in db :检查键 k 是否存在于字典 db 中。
# all(x not in k for x in exclude) :检查键 k 是否不包含 exclude 中的任何键。 all 函数确保所有条件都满足。
# v.shape == db[k].shape :检查 da 中的值 v 的形状是否与 db 中对应键的值的形状匹配。
# 如果上述条件都满足,则将键值对 (k, v) 添加到结果字典中。
return {k: v for k, v in da.items() if k in db and all(x not in k for x in exclude) and v.shape == db[k].shape}
# 这段代码实现了一个功能。从两个字典 da 和 db 中提取交集部分的键值对,同时排除指定的键,并确保值的形状匹配。具体功能如下。交集提取:仅保留两个字典中都存在的键。形状匹配:确保 da 中的值的形状与 db 中对应键的值的形状一致。排除指定键:通过 exclude 参数指定需要排除的键。使用 da 的值:结果字典中的值来自 da 。这种函数通常用于深度学习中,例如在模型权重加载时,仅加载与当前模型结构匹配的部分权重,同时排除某些不需要加载的层。22.def is_parallel(model):
# 这段代码定义了一个函数 is_parallel ,用于检查一个模型是否是并行化的。具体来说,它会判断模型是否是 DataParallel 或 DistributedDataParallel 的实例。
# 定义了一个函数 is_parallel ,它接受一个参数。
# 1.model :需要检查的模型。
def is_parallel(model):
# 如果模型是 DP 或 DDP 类型,则返回 True。
"""Returns True if model is of type DP or DDP."""
# 检查 model 是否是 DataParallel 或 DistributedDataParallel 的实例。如果是,则返回 True ;否则返回 False 。
# isinstance :这是一个内置函数,用于检查一个对象是否是某个类或元组中任一类型的实例。
# nn.parallel.DataParallel : PyTorch 提供的 DataParallel 类,用于在多 GPU 上并行化模型。
# nn.parallel.DistributedDataParallel : PyTorch 提供的 DistributedDataParallel 类,用于在分布式环境中并行化模型。
return isinstance(model, (nn.parallel.DataParallel, nn.parallel.DistributedDataParallel))
# 这段代码实现了一个功能。检查一个模型是否是并行化的。具体功能如下。检查模型类型:通过 isinstance 函数,判断模型是否是 DataParallel 或 DistributedDataParallel 的实例。返回布尔值:如果模型是并行化的,则返回 True ;否则返回 False 。通过 is_parallel 函数,开发者可以轻松地检查模型是否是并行化的,从而决定是否需要进行进一步的处理(如调用 de_parallel 函数将并行化模型转换为单 GPU 模型)。23.def de_parallel(model):
# 这段代码定义了一个函数 de_parallel ,用于将并行化的模型转换为单 GPU 模型。这在处理多 GPU 训练后的模型时非常有用,尤其是在需要对模型进行进一步分析或部署时。
# 定义了一个函数 de_parallel ,它接受一个参数。
# 1.model :需要去并行化的模型。
def de_parallel(model):
# 解除模型并行化:如果模型是 DP 或 DDP 类型,则返回单 GPU 模型。
"""De-parallelize a model: returns single-GPU model if model is of type DP or DDP."""
# is_parallel(model) :检查模型是否是并行化的。这个函数会判断模型是否是 DataParallel 或 DistributedDataParallel 的实例。
# model.module :如果模型是并行化的, model 实际上是一个包装器,其内部的模型可以通过 model.module 访问。
# else model :如果模型不是并行化的,则直接返回原模型。
return model.module if is_parallel(model) else model
# 这段代码实现了一个功能。将并行化的模型转换为单 GPU 模型。具体功能如下。检查模型是否并行化:通过调用 is_parallel(model) 判断模型是否是并行化的。提取内部模型:如果模型是并行化的(如使用了 DataParallel 或 DistributedDataParallel ),则返回 model.module 。返回原模型:如果模型不是并行化的,则直接返回原模型。
#
# 为什么需要去并行化?
# 在深度学习中,模型训练时可能会使用多 GPU 并行化(如 DataParallel 或 DistributedDataParallel )。然而,在某些情况下,需要将模型转换为单 GPU 模型,例如 :
# 模型分析 :在分析模型结构(如计算参数数量、FLOPs 等)时,通常需要单 GPU 模型。
# 模型部署 :在将模型部署到生产环境时,可能需要将模型转换为单 GPU 模型,以简化部署流程。
# 模型保存和加载 :在保存和加载模型时,通常需要处理单 GPU 模型,以避免并行化带来的复杂性。
# 通过 de_parallel 函数,开发者可以轻松地将并行化的模型转换为单 GPU 模型,从而方便后续操作。24.def one_cycle(y1=0.0, y2=1.0, steps=100):
# 这段代码定义了一个函数 one_cycle ,用于生成一个周期性的调度函数,该函数在给定的步数内从 y1 增加到 y2 ,然后在剩余的步数内从 y2 减少回 y1 。这种调度常用于调整学习率或其他超参数。
# 定义了一个函数 one_cycle ,接受三个参数。
# 1.y1 :周期开始时的值,默认为 0.0 。
# 2.y2 :周期结束时的值,也是周期中间点的值,默认为 1.0 。
# 3.steps :周期的总步数,即从 y1 到 y2 再回到 y1 的总步数,默认为 100 。
def one_cycle(y1=0.0, y2=1.0, steps=100):
# 返回从 y1 到 y2 的正弦斜坡的 lambda 函数 https://arxiv.org/pdf/1812.01187.pdf。
"""Returns a lambda function for sinusoidal ramp from y1 to y2 https://arxiv.org/pdf/1812.01187.pdf."""
# 返回一个 lambda 函数,该函数接受一个参数 x ,表示当前的步数。lambda 函数的计算过程如下 :
# x * math.pi / steps :将当前步数 x 转换为角度,范围从 0 到 math.pi 。
# math.cos(x * math.pi / steps) :计算上述角度的余弦值,范围从 1 到 -1 。
# (1 - math.cos(x * math.pi / steps)) / 2 :将余弦值转换为范围从 0 到 1 的值。当 x 为 0 时,余弦值为 1 ,转换后的值为 0 ;当 x 为 steps/2 时,余弦值为 -1 ,转换后的值为 1 ;当 x 为 steps 时,余弦值再次为 1 ,转换后的值再次为 0 。
# max((1 - math.cos(x * math.pi / steps)) / 2, 0) :确保转换后的值非负,虽然在正常情况下,这个值总是非负的。
# max((1 - math.cos(x * math.pi / steps)) / 2, 0) * (y2 - y1) + y1 :将转换后的值缩放并平移,使其范围从 y1 到 y2 。
return lambda x: max((1 - math.cos(x * math.pi / steps)) / 2, 0) * (y2 - y1) + y1
# 这个函数返回的 lambda 函数可以用于生成一个周期性的调度,常用于调整学习率或其他超参数。在周期的前半部分,值从 y1 增加到 y2 ,在周期的后半部分,值从 y2 减少回 y1 。这种调度方式有助于在训练过程中动态调整超参数,以达到更好的训练效果。25.def init_seeds(seed=0, deterministic=False):
# 这段代码定义了一个函数 init_seeds ,用于初始化随机种子,确保代码的可重复性(reproducibility)。它同时支持单 GPU 和多 GPU 环境,并提供了确定性(deterministic)和非确定性(non-deterministic)模式的选择。
# 定义了一个函数 init_seeds ,接受两个参数。
# 1.seed :随机种子,默认值为 0 。
# 2.deterministic :布尔值,用于控制是否启用确定性模式,默认为 False 。
def init_seeds(seed=0, deterministic=False):
# 初始化随机数生成器(RNG)种子 https://pytorch.org/docs/stable/notes/randomness.html。
"""Initialize random number generator (RNG) seeds https://pytorch.org/docs/stable/notes/randomness.html."""
# 使用 Python 的 random 模块设置全局随机种子为 seed 。这会影响 random 模块生成的所有随机数。
random.seed(seed)
# 使用 NumPy 设置随机种子为 seed 。这会影响 NumPy 中的所有随机操作。
np.random.seed(seed)
# 使用 PyTorch 设置 CPU 的随机种子为 seed 。这会影响 PyTorch 在 CPU 上的所有随机操作。
torch.manual_seed(seed)
# 使用 PyTorch 设置主 GPU 的随机种子为 seed 。这会影响 PyTorch 在主 GPU 上的所有随机操作。
torch.cuda.manual_seed(seed)
# 使用 PyTorch 设置所有 GPU 的随机种子为 seed 。这确保了在多 GPU 环境中,所有 GPU 的随机操作都是可重复的。这是一个“异常安全”的操作,即使在没有 GPU 的环境中也不会报错。
torch.cuda.manual_seed_all(seed) # for Multi-GPU, exception safe
# 这行代码被注释掉了,它通常用于启用 PyTorch 的 cuDNN 自动调优功能,以选择最优的卷积算法。启用后可能会导致结果不可重复,因此在需要可重复性时通常会禁用。
# torch.backends.cudnn.benchmark = True # AutoBatch problem https://github.com/ultralytics/yolov5/issues/9287
# 如果 deterministic 参数为 True ,启用确定性模式。
if deterministic:
# 检查是否安装了 PyTorch 2.0 或更高版本。 TORCH_2_0 是一个已经定义的布尔变量。
if TORCH_2_0:
# 启用 PyTorch 的确定性算法模式。 warn_only=True 表示如果某些操作无法保证确定性,会发出警告而不是报错。
torch.use_deterministic_algorithms(True, warn_only=True) # warn if deterministic is not possible
# 启用 cuDNN 的确定性模式。这会牺牲一些性能,但确保卷积操作的结果是可重复的。
torch.backends.cudnn.deterministic = True
# 设置环境变量 CUBLAS_WORKSPACE_CONFIG ,用于控制 cuBLAS 的工作空间配置。这有助于在某些情况下保证 GPU 操作的确定性。
os.environ["CUBLAS_WORKSPACE_CONFIG"] = ":4096:8"
# 设置环境变量 PYTHONHASHSEED ,以确保 Python 的哈希操作也是可重复的。这会影响 Python 的字典和集合等数据结构。
os.environ["PYTHONHASHSEED"] = str(seed)
# 如果 PyTorch 版本低于 2.0,进入 else 分支。
else:
# 发出警告,提示用户升级到 PyTorch 2.0 或更高版本以启用确定性训练。
LOGGER.warning("WARNING ⚠️ Upgrade to torch>=2.0.0 for deterministic training.") # 警告⚠️升级到 torch>=2.0.0 进行确定性训练。
# 如果 deterministic 参数为 False ,进入非确定性模式。
else:
# 禁用 PyTorch 的确定性算法模式。
torch.use_deterministic_algorithms(False)
# 禁用 cuDNN 的确定性模式,以获得更好的性能。
torch.backends.cudnn.deterministic = False
# 这段代码实现了一个功能:初始化随机种子并根据用户需求启用或禁用确定性模式。它的主要特点包括。多库支持:同时支持 Python 的 random 模块、NumPy 和 PyTorch,确保所有随机操作的可重复性。支持单 GPU 和多 GPU 环境。确定性模式:如果启用确定性模式( deterministic=True ),会通过多种方式确保代码的可重复性,包括:启用 PyTorch 的确定性算法。启用 cuDNN 的确定性模式。设置环境变量以控制 cuBLAS 和 Python 的哈希操作。如果 PyTorch 版本低于 2.0,会发出警告,提示用户升级。非确定性模式:如果禁用确定性模式( deterministic=False ),会关闭相关设置以获得更好的性能。这种设计使得函数能够灵活适应不同的需求,既可以在调试和验证阶段启用确定性模式以确保结果可重复,也可以在实际训练中禁用以获得更好的性能。26.class ModelEMA:
# 这段代码定义了一个名为 ModelEMA 的类,用于实现模型的指数移动平均(Exponential Moving Average, EMA)。EMA 是一种常用的模型优化技术,用于在训练过程中平滑模型参数的变化,从而提高模型的泛化能力和稳定性。
# 定义了一个名为 ModelEMA 的类,用于实现模型的指数移动平均。
class ModelEMA:
# 更新了 https://github.com/rwightman/pytorch-image-models 中的指数移动平均线 (EMA)。保留模型 state_dict(参数和缓冲区)中所有内容的移动平均值。
# 有关 EMA 的详细信息,请参阅 https://www.tensorflow.org/api_docs/python/tf/train/ExponentialMovingAverage
# 要禁用 EMA,请将 `enabled` 属性设置为 `False`。
"""
Updated Exponential Moving Average (EMA) from https://github.com/rwightman/pytorch-image-models. Keeps a moving
average of everything in the model state_dict (parameters and buffers).
For EMA details see https://www.tensorflow.org/api_docs/python/tf/train/ExponentialMovingAverage
To disable EMA set the `enabled` attribute to `False`.
"""
# 这段代码是 ModelEMA 类的 __init__ 方法的详细实现,用于初始化一个指数移动平均(EMA)模型。它的作用是创建一个 EMA 模型的副本,并设置相关的参数和属性。
# 定义了 ModelEMA 类的初始化方法 __init__ ,它接受以下参数 :
# 1.model :需要进行 EMA 的原始模型。
# 2.decay :EMA 的衰减率,默认值为 0.9999 。衰减率决定了新参数对 EMA 模型的影响程度。
# 3.tau :衰减率的调整参数,默认值为 2000 。它用于控制衰减率的动态变化,使得 EMA 在训练初期能够更快地适应模型参数的变化。
# 4.updates :EMA 更新的次数,默认值为 0 。这个参数用于记录当前 EMA 模型已经更新了多少次。
def __init__(self, model, decay=0.9999, tau=2000, updates=0):
# 使用给定的参数初始化‘模型’的 EMA。
"""Initialize EMA for 'model' with given arguments."""
# de_parallel(model) : de_parallel 是一个函数,用于处理模型,确保它不是通过 DataParallel 或 DistributedDataParallel 包装的。这是因为 EMA 模型通常不需要并行化,并且需要直接操作原始模型的参数。
# deepcopy(...) :使用 deepcopy 创建模型的一个深拷贝。这意味着 EMA 模型和原始模型在内存中是完全独立的,它们的参数不会相互影响。
# .eval() :将 EMA 模型设置为评估模式。EMA 模型通常只用于推理,而不是训练,因此不需要启用梯度计算或其他训练相关的操作。
# FP32 EMA :注释中提到这是一个 FP32(32位浮点数)的 EMA 模型。这意味着即使原始模型使用了混合精度训练(如 FP16),EMA 模型也会以 FP32 格式存储参数,以确保精度。
self.ema = deepcopy(de_parallel(model)).eval() # FP32 EMA
# 将传入的 updates 参数赋值给实例变量 self.updates ,用于记录当前 EMA 模型已经更新的次数。
self.updates = updates # number of EMA updates
# 定义了一个 动态衰减率函数 self.decay ,它是一个 lambda 函数,接受一个参数 x (通常是 EMA 更新的次数)。
# decay * (1 - math.exp(-x / tau)) :计算衰减率。这个公式设计了一个指数衰减曲线,使得衰减率在训练初期( x 较小时)较低,随着更新次数的增加逐渐趋于稳定(接近 decay )。这种设计有助于在训练初期让 EMA 模型更快地适应原始模型的参数变化,同时在训练后期保持平滑的参数更新。
# decay exponential ramp :注释中提到这是一个“衰减指数斜坡”,用于帮助早期 epoch 更快地调整 EMA 模型。
self.decay = lambda x: decay * (1 - math.exp(-x / tau)) # decay exponential ramp (to help early epochs)
# 遍历 EMA 模型的所有参数。
for p in self.ema.parameters():
# 将每个参数的 requires_grad 属性设置为 False 。这意味着 EMA 模型的参数不会参与梯度计算,从而节省计算资源并避免不必要的更新。EMA 模型的参数仅通过手动更新(如在 update 方法中)进行调整,而不是通过反向传播。
p.requires_grad_(False)
# 设置一个布尔标志 self.enabled ,默认值为 True ,表示 EMA 更新是启用的。这个标志可以在后续操作中用于控制是否执行 EMA 更新。
self.enabled = True
# 这段代码实现了 ModelEMA 类的初始化逻辑,主要功能包括。创建 EMA 模型副本:使用 deepcopy 创建原始模型的一个深拷贝,确保 EMA 模型独立于原始模型。将 EMA 模型设置为评估模式,避免不必要的训练操作。设置动态衰减率:使用一个指数衰减函数动态调整衰减率,使得 EMA 模型在训练初期能够更快地适应参数变化,同时在后期保持平滑更新。禁用梯度计算:将 EMA 模型的所有参数的 requires_grad 属性设置为 False ,避免参与梯度计算,节省资源。启用 EMA 更新:默认启用 EMA 更新,但可以通过 self.enabled 标志动态控制是否执行更新。这种设计使得 ModelEMA 类能够灵活地应用于深度学习模型的训练过程中,通过平滑参数更新提高模型的泛化能力和稳定性。
# 这段代码是 ModelEMA 类的 update 方法,用于更新指数移动平均(EMA)模型的参数。它的作用是根据当前训练模型的参数和 EMA 模型的参数,按照动态衰减率进行加权平均更新。
# 定义了 ModelEMA 类的 update 方法,它接受一个参数。
# 1.model :当前训练的模型,其参数将用于更新 EMA 模型。
def update(self, model):
# 更新 EMA 参数。
"""Update EMA parameters."""
# 检查是否启用了 EMA 更新。如果 self.enabled 为 False ,则跳过后续的更新操作。这允许在某些情况下暂停 EMA 更新(例如在调试或特定阶段)。
if self.enabled:
# 将 EMA 更新的次数加 1。 self.updates 是一个计数器,记录了自 EMA 初始化以来的更新次数。
self.updates += 1
# 调用 self.decay 函数(在 __init__ 方法中定义),根据 当前的更新次数 计算 动态衰减率 d 。衰减率决定了 EMA 参数的更新程度。
d = self.decay(self.updates)
# 使用 de_parallel 函数处理传入的模型,确保它不是通过 DataParallel 或 DistributedDataParallel 包装的。这是因为 EMA 更新需要直接操作原始模型的参数。 调用 state_dict() 方法获取当前模型的状态字典,该字典包含了模型的所有参数及其值。
msd = de_parallel(model).state_dict() # model state_dict
# 遍历 EMA 模型的状态字典, k 是 参数名称 , v 是 对应的参数值 。
for k, v in self.ema.state_dict().items():
# 检查参数 v 的数据类型是否为浮点类型(如 float16 或 float32 )。EMA 更新仅适用于浮点类型的参数,因为非浮点类型的参数(如整数或布尔类型)通常不需要平滑处理。
if v.dtype.is_floating_point: # true for FP16 and FP32
# 将 EMA 参数 v 乘以衰减率 d 。这一步实现了 EMA 参数的“衰减”部分,即保留一部分旧的参数值。
v *= d
# 将当前模型的参数 msd[k] 与 EMA 参数 v 进行加权平均。 (1 - d) 是新参数的权重,表示当前模型参数对 EMA 参数的影响程度。 msd[k].detach() 用于获取当前模型参数的值,并确保它不会参与梯度计算(因为 EMA 模型的参数不会参与反向传播)。
v += (1 - d) * msd[k].detach()
# 这是一条被注释掉的断言语句,用于检查 EMA 参数和 当前模型参数 的数据类型是否一致(均为 torch.float32 )。如果数据类型不一致,可能会导致意外的数值问题。这个断言在调试时可能很有用,但在实际代码中通常被注释掉以避免性能开销。
# assert v.dtype == msd[k].dtype == torch.float32, f'{k}: EMA {v.dtype}, model {msd[k].dtype}'
# update 方法的核心功能是根据当前训练模型的参数,动态更新 EMA 模型的参数。它的主要特点包括。动态衰减率:使用动态衰减率 d ,其值随着更新次数的增加逐渐趋于稳定。这种设计有助于在训练初期快速调整 EMA 模型,同时在训练后期保持平滑的参数更新。浮点类型参数更新:仅更新浮点类型的参数(如 float16 或 float32 ),忽略非浮点类型的参数。这是因为 EMA 主要用于平滑模型的权重和偏置,而不是其他类型的参数。梯度分离:使用 detach() 方法确保当前模型的参数不会参与梯度计算,从而避免 EMA 模型的参数意外地参与反向传播。灵活性:通过 self.enabled 标志,可以动态控制是否执行 EMA 更新,方便在需要时暂停或恢复 EMA。EMA 是一种非常有效的技术,通过平滑参数更新,能够提高模型的泛化能力和稳定性,尤其在训练深度学习模型时效果显著。
# 这段代码是 ModelEMA 类的 update_attr 方法,用于将当前训练模型的某些属性同步到 EMA 模型中。这个方法的主要目的是确保 EMA 模型和当前模型在某些属性上保持一致,同时可以根据需要包含或排除特定属性。
# 定义了 ModelEMA 类的 update_attr 方法,它接受以下参数 :
# 1.model :当前训练的模型,其属性将被同步到 EMA 模型中。
# 2.include :一个可选的元组,指定需要同步的属性名称。默认为空元组,表示不显式指定需要同步的属性。
# 3.exclude :一个可选的元组,指定需要排除的属性名称。默认值为 ("process_group", "reducer") ,表示默认排除这些属性。
def update_attr(self, model, include=(), exclude=("process_group", "reducer")):
# 更新属性并保存已删除优化器的剥离模型。
"""Updates attributes and saves stripped model with optimizer removed."""
# 检查是否启用了 EMA 更新。如果 self.enabled 为 False ,则跳过后续的属性同步操作。这允许在某些情况下暂停属性同步(例如在调试或特定阶段)。
if self.enabled:
# 调用 copy_attr 函数,将当前模型 model 的某些属性同步到 EMA 模型 self.ema 中。
# self.ema :目标对象,即 EMA 模型。
# model :源对象,即当前训练的模型。
# include :指定需要同步的属性名称。如果为空元组,则不显式指定需要同步的属性。
# exclude :指定需要排除的属性名称。默认值为 ("process_group", "reducer") ,表示这些属性不会被同步。
# def copy_attr(a, b, include=(), exclude=()): -> 用于将一个对象 b 的属性复制到另一个对象 a 中。它还提供了选项来包含或排除某些属性。使用 setattr 函数将属性 k 的值 v 设置到目标对象 a 中。 setattr(a, k, v) 等价于 a.k = v 。
copy_attr(self.ema, model, include, exclude)
# update_attr 方法的核心功能是将当前训练模型的某些属性同步到 EMA 模型中,同时支持灵活地包含或排除特定属性。它的主要特点包括。属性同步:使用 copy_attr 函数将当前模型的属性复制到 EMA 模型中。这确保了 EMA 模型和当前模型在某些属性上保持一致。灵活的包含和排除:通过 include 参数,可以显式指定需要同步的属性。通过 exclude 参数,可以显式指定需要排除的属性。默认情况下, process_group 和 reducer 属性会被排除,因为这些属性通常与分布式训练相关,不需要同步到 EMA 模型中。启用/禁用控制:通过 self.enabled 标志,可以动态控制是否执行属性同步,方便在需要时暂停或恢复同步操作。应用场景:在训练过程中,某些属性(如学习率调度器、优化器状态等)可能需要在 EMA 模型和当前模型之间保持一致。 update_attr 方法提供了这种同步机制。默认排除的属性(如 process_group 和 reducer )通常是与分布式训练相关的内部属性,这些属性不需要同步到 EMA 模型中。通过这种方式, update_attr 方法为 EMA 模型提供了额外的灵活性,使其能够更好地适应不同的训练场景和需求。
# ModelEMA 类实现了一个用于模型参数平滑的指数移动平均(EMA)机制。它的主要功能和特点包括。 EMA 参数更新:使用动态衰减率更新 EMA 模型的参数,衰减率会随着更新次数的增加逐渐趋于稳定。仅更新浮点类型的参数,确保 EMA 的有效性。模型属性同步:提供了 update_attr 方法,用于将当前模型的某些属性同步到 EMA 模型中,支持包含和排除特定属性。灵活性:提供了启用/禁用 EMA 更新的标志 enabled ,方便在需要时暂停或恢复 EMA 更新。多 GPU 支持:使用 de_parallel 函数处理模型,确保 EMA 模型和当前模型的参数更新在多 GPU 环境中也能正确工作。EMA 是一种非常有效的技术,尤其在训练深度学习模型时,能够帮助平滑模型参数的变化,从而提高模型的泛化能力和稳定性。27.def strip_optimizer(f: Union[str, Path] = "best.pt", s: str = "", updates: dict = None) -> dict:
# 这段代码定义了一个函数 strip_optimizer ,用于清理和优化 PyTorch 模型检查点文件(checkpoint)。它的主要功能是从检查点中移除不必要的信息(如优化器状态、EMA 状态等),并将模型转换为 FP16 格式,同时保留模型的元数据和训练参数。
# 定义了 strip_optimizer 函数,接受以下参数 :
# 1.f :检查点文件的路径,默认值为 "best.pt" 。
# 2.s :保存清理后检查点的目标路径,默认为空字符串(表示保存到原路径)。
# 3.updates :一个可选的字典,用于更新检查点的内容,默认为 None 。
# 函数返回一个字典,表示清理后的检查点内容。
def strip_optimizer(f: Union[str, Path] = "best.pt", s: str = "", updates: dict = None) -> dict:
# 从 'f' 中剥离优化器以完成训练,可选择保存为 's'。
# 注意:
# 使用 `ultralytics.nn.torch_safe_load` 查找缺失模块,其中 `x = torch_safe_load(f)[0]`
"""
Strip optimizer from 'f' to finalize training, optionally save as 's'.
Args:
f (str): file path to model to strip the optimizer from. Default is 'best.pt'.
s (str): file path to save the model with stripped optimizer to. If not provided, 'f' will be overwritten.
updates (dict): a dictionary of updates to overlay onto the checkpoint before saving.
Returns:
(dict): The combined checkpoint dictionary.
Example:
```python
from pathlib import Path
from ultralytics.utils.torch_utils import strip_optimizer
for f in Path("path/to/model/checkpoints").rglob("*.pt"):
strip_optimizer(f)
```
Note:
Use `ultralytics.nn.torch_safe_load` for missing modules with `x = torch_safe_load(f)[0]`
"""
# 这段代码是 strip_optimizer 函数的核心部分,主要负责加载 PyTorch 模型检查点文件,并对其进行基本验证。如果验证失败,会记录警告并返回空字典。
# 开始一个 try 块,用于捕获加载和验证检查点时可能出现的异常。
try:
# 使用 torch.load 加载检查点文件 f 。 参数 map_location=torch.device("cpu") 确保加载的模型被映射到 CPU,避免因设备不匹配导致的错误。 加载后的检查点内容被存储在变量 x 中。
x = torch.load(f, map_location=torch.device("cpu"))
# 验证加载的内容 x 是否为一个 Python 字典。这是因为 PyTorch 模型检查点通常以字典形式保存,包含模型权重、训练参数等信息。 如果 x 不是字典,会抛出一个 AssertionError ,并附带提示信息 "checkpoint is not a Python dictionary" 。
assert isinstance(x, dict), "checkpoint is not a Python dictionary" # checkpoint 不是 Python 字典。
# 验证字典 x 中是否包含键 "model" 。键 "model" 通常用于存储模型的权重。 如果 "model" 键不存在,会抛出一个 AssertionError ,并附带提示信息 "'model' missing from checkpoint" 。
assert "model" in x, "'model' missing from checkpoint" # 检查点缺少“model” 。
# 捕获 try 块中可能抛出的任何异常,并将其存储在变量 e 中。
except Exception as e:
# 如果加载或验证失败,使用 LOGGER.warning 记录一条警告信息。 警告信息包含检查点文件的路径 f 和异常的具体信息 e ,提示用户该文件不是一个有效的 Ultralytics 模型。
LOGGER.warning(f"WARNING ⚠️ Skipping {f}, not a valid Ultralytics model: {e}") # 警告 ⚠️ 跳过 {f},不是有效的 Ultralytics 模型:{e} 。
# 如果加载或验证失败,返回一个空字典 {} ,表示无法处理该检查点文件。
return {}
# 定义了一个字典 metadata ,包含一些元数据信息。
metadata = {
# 当前日期和时间,格式为 ISO 8601(例如 "2025-10-10T12:34:56" )。
"date": datetime.now().isoformat(),
# 当前代码版本( __version__ 是一个已定义的变量)。
"version": __version__,
# 许可证信息。
"license": "AGPL-3.0 License (https://ultralytics.com/license)",
# 文档链接。
"docs": "https://docs.ultralytics.com",
}
# 这段代码的核心功能是加载和验证 PyTorch 模型检查点文件,并确保其符合预期格式。它的主要特点包括。异常处理:使用 try-except 块捕获加载和验证过程中可能出现的异常。如果检查点文件无效,记录警告并返回空字典,避免程序因错误而中断。基本验证:验证加载的内容是否为字典格式。验证字典中是否包含 "model" 键,确保模型权重存在。元数据定义:定义了一个包含当前日期、版本号、许可证信息和文档链接的元数据字典。这些元数据将被保存到清理后的检查点文件中,提供关于文件的额外信息。日志记录:使用 LOGGER.warning 记录警告信息,方便用户了解问题的具体原因。通过这种方式,这段代码确保了只有有效的检查点文件才会被进一步处理,同时为后续的操作提供了必要的元数据信息。
# 这段代码是 strip_optimizer 函数中的一部分,主要功能是对加载的模型进行一系列更新和清理操作,以确保模型适合后续的保存和使用。
# Update model
# 检查检查点字典 x 中是否存在键 "ema" 。 "ema" 通常用于存储指数移动平均(EMA)模型的权重。
if x.get("ema"):
# 如果存在 "ema" ,则将 EMA 模型的权重赋值给 "model" 键。这一步的作用是用 EMA 模型替换原始模型,因为 EMA 模型通常在推理时表现更好,具有更高的稳定性和泛化能力。
x["model"] = x["ema"] # replace model with EMA
# 检查模型对象 x["model"] 是否有属性 "args" 。 "args" 通常是一个存储模型训练参数的属性。
if hasattr(x["model"], "args"):
# 如果存在 "args" ,将其从 IterableSimpleNamespace (或其他类似对象)转换为字典格式。这种转换使得模型参数更容易被访问和修改。
x["model"].args = dict(x["model"].args) # convert from IterableSimpleNamespace to dict
# 检查模型对象 x["model"] 是否有属性 "criterion" 。 "criterion" 通常用于存储模型的损失函数。
if hasattr(x["model"], "criterion"):
# 如果存在 "criterion" ,将其设置为 None 。这一步的作用是移除模型的损失函数,因为在保存和共享模型时,通常不需要包含训练相关的损失函数。
x["model"].criterion = None # strip loss criterion
# 将模型转换为半精度浮点格式(FP16)。这一步可以显著减小模型的存储大小,同时在推理时也能提高计算效率。FP16 是一种常用的推理优化手段。
x["model"].half() # to FP16
# 遍历模型的所有参数。
for p in x["model"].parameters():
# 将每个参数的 requires_grad 属性设置为 False 。这一步的作用是禁用梯度计算,因为在推理时不需要对模型参数进行反向传播。这不仅可以节省内存,还可以避免不必要的计算开销。
p.requires_grad = False
# 这段代码的核心功能是对加载的模型进行清理和优化,使其更适合后续的保存和推理使用。它的主要作用包括。替换为 EMA 模型:如果检查点中包含 EMA 模型的权重,用 EMA 模型替换原始模型。EMA 模型通常在推理时表现更好。清理和转换属性:将模型的 args 属性从 IterableSimpleNamespace 转换为字典格式,便于后续访问和修改。移除模型的损失函数( criterion ),因为在保存和共享模型时不需要包含训练相关的损失函数。优化模型格式:将模型转换为 FP16 格式,减小模型大小并提高推理效率。禁用所有参数的梯度计算,节省内存并避免不必要的计算开销。通过这些操作,模型被清理和优化后,更适合用于推理或进一步的部署。
# 这段代码是 strip_optimizer 函数的一部分,用于清理和更新检查点字典 x 中的其他键值对,确保只保留必要的信息。
# Update other keys
# 将 默认配置字典 DEFAULT_CFG_DICT 和 检查点中的训练参数 x.get("train_args", {}) 合并为一个新的字典 args 。
# DEFAULT_CFG_DICT 是一个预定义的字典,包含模型训练的默认配置。
# x.get("train_args", {}) 是检查点中存储的训练参数,如果没有则默认为空字典。
# 使用字典解包( ** )的方式合并两个字典,后面的字典中的键值对会覆盖前面字典中的同名键。
args = {**DEFAULT_CFG_DICT, **x.get("train_args", {})} # combine args
# 遍历一组指定的键 : "optimizer" 、 "best_fitness" 、 "ema" 和 "updates" 。
for k in "optimizer", "best_fitness", "ema", "updates": # keys
# 将检查点字典 x 中的这些键对应的值设置为 None 。 这一步的目的是移除这些键的值,因为它们通常与训练过程相关(如优化器状态、最佳性能指标、EMA 状态等),在保存清理后的检查点时不需要保留。
x[k] = None
# 将检查点字典 x 中的 "epoch" 键对应的值设置为 -1 。 这表示清理后的检查点不包含任何训练状态(如训练完成的 epoch 数)。 -1 是一个特殊的标记值,表示该检查点仅用于推理。
x["epoch"] = -1
# 使用字典推导式从 args 中筛选出键属于 DEFAULT_CFG_KEYS 的键值对,并将其存储到 x["train_args"] 中。
# DEFAULT_CFG_KEYS 是一个预定义的键集合,包含需要保留的默认配置键。
# 这一步的作用是移除 args 中不属于默认配置的键值对,只保留必要的训练参数。
x["train_args"] = {k: v for k, v in args.items() if k in DEFAULT_CFG_KEYS} # strip non-default keys
# 这是一条被注释掉的代码,原本的作用是将清理后的训练参数 x["train_args"] 赋值给模型的 args 属性。 这一步可能是为了确保模型对象中也包含清理后的训练参数,但在这段代码中被注释掉了。
# x['model'].args = x['train_args']
# 这段代码的核心功能是对检查点字典 x 中的其他键值对进行清理和更新,确保只保留必要的信息。它的主要作用包括。合并训练参数:将默认配置和检查点中的训练参数合并为一个新的字典 args 。移除不必要的键:将 "optimizer" 、 "best_fitness" 、 "ema" 和 "updates" 等键的值设置为 None ,因为这些键通常与训练过程相关,不需要保存到清理后的检查点中。标记非训练状态:将 "epoch" 设置为 -1 ,表示清理后的检查点不包含任何训练状态。清理训练参数:从合并后的训练参数 args 中筛选出属于默认配置的键值对,移除其他不必要的键值对。通过这些操作,检查点被清理和优化后,更适合用于推理或进一步的部署。
# 这段代码是 strip_optimizer 函数的最后部分,负责将清理和更新后的检查点内容保存到文件中,并记录相关信息。
# Save
# 将 metadata 、清理后的检查点内容 x 和用户提供的更新内容 updates 合并为一个新的字典 combined 。
# 使用字典解包( ** )的方式合并多个字典。如果存在同名键,右侧字典中的键值对会覆盖左侧字典中的键值对。
# updates or {} 确保即使 updates 为 None ,也不会报错,而是使用空字典作为默认值。
combined = {**metadata, **x, **(updates or {})}
# 使用 torch.save 将合并后的字典 combined 保存到文件中。 保存路径由 s or f 决定:如果 s (目标路径)不为空,则保存到 s 指定的路径。 如果 s 为空,则保存到原始路径 f 。 这一步确保了清理后的检查点可以保存到指定路径或原路径。
torch.save(combined, s or f) # combine dicts (prefer to the right)
# 使用 os.path.getsize 获取 保存后的文件大小(以字节为单位) 。 将文件大小转换为 MB(兆字节),通过除以 1e6 (1000000)。 文件路径同样由 s or f 决定。
mb = os.path.getsize(s or f) / 1e6 # file size
# 使用日志记录器 LOGGER 记录一条信息。 提示用户优化器已从原始文件 f 中移除。 如果指定了目标路径 s ,还会记录保存的新路径。 显示文件大小(保留一位小数)。 这条日志信息方便用户了解清理后的检查点文件的保存位置和大小。
LOGGER.info(f"Optimizer stripped from {f},{f' saved as {s},' if s else ''} {mb:.1f}MB") # 优化器从 {f} 中剥离,{f' 保存为 {s},' if s else ''} {mb:.1f}MB 。
# 返回合并后的字典 combined ,包含清理后的检查点内容和元数据。 这使得函数的调用者可以获取清理后的检查点内容,方便后续使用。
return combined
# 这段代码的核心功能是将清理和更新后的检查点内容保存到文件中,并记录相关信息。它的主要作用包括。合并字典:将元数据、清理后的检查点内容和用户提供的更新内容合并为一个字典 combined 。确保右侧字典中的键值对优先覆盖左侧字典中的同名键。保存检查点:使用 torch.save 将合并后的字典保存到指定路径或原路径。支持灵活的目标路径 s ,方便用户自定义保存位置。记录文件大小:使用 os.path.getsize 获取保存后的文件大小,并转换为 MB。通过日志记录器记录文件的保存路径和大小,方便用户跟踪。返回清理后的检查点内容:函数返回合并后的字典 combined ,方便调用者获取清理后的检查点内容。通过这些操作,这段代码确保了清理后的检查点文件被正确保存,并提供了清晰的日志信息,方便用户了解操作结果。
# strip_optimizer 函数的主要功能是从 PyTorch 模型检查点中移除不必要的信息(如优化器状态、EMA 状态等),并将模型转换为 FP16 格式,同时保留模型的元数据和训练参数。它的主要特点包括。清理优化器状态:移除优化器状态、EMA 状态和其他不必要的键,使检查点更轻量。转换为 FP16:将模型转换为 FP16 格式,节省存储空间并提高推理效率。保留元数据:添加当前日期、版本号、许可证信息和文档链接等元数据。灵活的保存路径:支持将清理后的检查点保存到原路径或指定的目标路径。日志记录:记录清理后的文件大小和保存路径,方便用户跟踪。用户自定义更新:支持通过 updates 参数自定义更新检查点的内容。这种设计使得 strip_optimizer 函数能够灵活地用于清理和优化模型检查点,特别适用于部署和共享模型时,确保检查点文件更小、更高效且易于使用。28.def convert_optimizer_state_dict_to_fp16(state_dict):
# 这段代码定义了一个函数 convert_optimizer_state_dict_to_fp16 ,用于将优化器状态字典中的浮点张量从 torch.float32 转换为 torch.float16 (半精度浮点格式)。这种转换通常用于减少优化器状态的内存占用,尤其是在使用混合精度训练时。
# 定义了一个函数 convert_optimizer_state_dict_to_fp16 ,接受一个参数。
# 1.state_dict :优化器的状态字典,通常是从 torch.optim.Optimizer 的 state_dict() 方法中获取的。
def convert_optimizer_state_dict_to_fp16(state_dict):
# 将给定优化器的 state_dict 转换为 FP16,重点关注张量转换的“state”键。
# 此方法旨在减少存储大小而不改变“param_groups”,因为它们包含非张量数据。
"""
Converts the state_dict of a given optimizer to FP16, focusing on the 'state' key for tensor conversions.
This method aims to reduce storage size without altering 'param_groups' as they contain non-tensor data.
"""
# 遍历优化器状态字典中的 "state" 键对应的值。 "state" 键通常包含 每个参数的状态信息 ,例如动量、方差等。
for state in state_dict["state"].values():
# 对于每个参数的状态字典,遍历其键值对。 k 是状态的名称(如 "exp_avg" 、 "exp_avg_sq" 等), v 是对应的值。
for k, v in state.items():
# 检查当前状态值是否满足以下条件。 键名 k 不等于 "step" ( "step" 通常是一个整数,表示优化器的步数,不需要转换)。 值 v 是一个 torch.Tensor 对象。 张量 v 的数据类型是 torch.float32 。
if k != "step" and isinstance(v, torch.Tensor) and v.dtype is torch.float32:
# 如果满足上述条件,将张量 v 转换为 torch.float16 格式,并更新状态字典中的对应值。 v.half() 是 PyTorch 中将张量转换为半精度浮点格式的方法。
state[k] = v.half()
# 返回转换后的优化器状态字典。
return state_dict
# convert_optimizer_state_dict_to_fp16 函数的主要功能是将优化器状态字典中的浮点张量从 torch.float32 转换为 torch.float16 。它的主要特点包括。减少内存占用:半精度浮点格式( torch.float16 )占用的内存是单精度浮点格式( torch.float32 )的一半,这可以显著减少优化器状态的内存占用。兼容性:该函数只转换浮点张量,忽略非浮点类型的值(如整数或字符串),确保不会破坏优化器状态的结构。灵活性:该函数直接操作传入的 state_dict ,并返回转换后的状态字典,方便在需要时对优化器状态进行进一步处理。应用场景:在混合精度训练(Mixed Precision Training)中,优化器状态通常需要与模型的精度一致。将优化器状态转换为 torch.float16 可以提高内存效率,同时保持与模型的兼容性。通过这种方式, convert_optimizer_state_dict_to_fp16 函数为优化器状态的内存优化提供了一种简单而有效的方法。29.def cuda_memory_usage(device=None):
# 这段代码定义了一个名为 cuda_memory_usage 的上下文管理器,用于监测和记录在指定 GPU 设备上运行代码时的显存使用情况。它通过 torch.cuda.memory_reserved 获取显存使用量,并在上下文退出时记录最终的显存占用情况。
# 使用 @contextmanager 装饰器定义了一个上下文管理器 cuda_memory_usage 。 @contextmanager 是 contextlib 模块中的一个装饰器,用于简化上下文管理器的实现,避免手动定义 __enter__ 和 __exit__ 方法。
@contextmanager
# 函数接收一个可选参数。
# 1.device :要监测的 GPU 设备。默认值为 None ,表示使用当前默认的 GPU 设备。
def cuda_memory_usage(device=None):
# 监控和管理 CUDA 内存使用情况。
# 此函数检查 CUDA 是否可用,如果可用,则清空 CUDA 缓存以释放未使用的内存。然后,它会生成一个包含内存使用信息的字典,调用者可以更新该字典。最后,它会使用 CUDA 在指定设备上保留的内存量更新该字典。
# 结果是:
# (dict):一个字典,其键“memory”初始化为 0,将使用保留的内存进行更新。
"""
Monitor and manage CUDA memory usage.
This function checks if CUDA is available and, if so, empties the CUDA cache to free up unused memory.
It then yields a dictionary containing memory usage information, which can be updated by the caller.
Finally, it updates the dictionary with the amount of memory reserved by CUDA on the specified device.
Args:
device (torch.device, optional): The CUDA device to query memory usage for. Defaults to None.
Yields:
(dict): A dictionary with a key 'memory' initialized to 0, which will be updated with the reserved memory.
"""
# 初始化一个字典 cuda_info ,用于 存储显存使用信息 。初始值为 {"memory": 0} ,表示显存占用量为 0。
cuda_info = dict(memory=0)
# 检查当前环境中是否支持 CUDA(即是否有可用的 GPU 设备)。如果支持,则进入以下代码块。
if torch.cuda.is_available():
# 调用 torch.cuda.empty_cache() 清空 CUDA 的缓存。这一步是为了在进入上下文之前释放未使用的显存,确保显存占用量的统计更加准确。
torch.cuda.empty_cache()
# 使用 yield 语句将 cuda_info 字典传递给上下文中的代码。
try:
# 在 yield 之前,表示进入上下文时的逻辑; yield 之后的代码则会在退出上下文时执行。
# 在上下文内部,用户可以访问 cuda_info 字典,但此时显存占用量尚未更新。
yield cuda_info
# 在退出上下文时,无论是否发生异常,都会执行 finally 块中的代码。
finally:
# 调用 torch.cuda.memory_reserved(device) 获取当前 GPU 设备的显存占用量(以字节为单位),并将其存储到 cuda_info["memory"] 中。 device 参数用于指定要查询的 GPU 设备。如果为 None ,则默认查询当前设备。
cuda_info["memory"] = torch.cuda.memory_reserved(device)
# 如果当前环境中不支持 CUDA(即没有可用的 GPU 设备),则直接 yield 初始的 cuda_info 字典( {"memory": 0} ),并跳过显存监测逻辑。
else:
yield cuda_info
# cuda_memory_usage 是一个上下文管理器,用于监测在指定 GPU 设备上运行代码时的显存占用情况。它通过 torch.cuda.memory_reserved 获取显存使用量,并在上下文退出时记录最终的显存占用情况。该上下文管理器通过 @contextmanager 装饰器实现,简化了上下文管理器的定义过程。在使用时,用户可以通过 with 语句方便地监测显存占用,而无需手动管理显存统计的逻辑。30.def profile(input, ops, n=10, device=None, max_num_obj=0):
# 这段代码定义了一个名为 profile 的函数,用于对 PyTorch 模型或操作进行性能分析,包括速度、显存占用和 FLOPs(浮点运算次数)。
# 定义了一个函数 profile ,接收以下参数 :
# 1.input :输入张量或张量列表,用于传递给模型或操作。
# 2.ops :模型或操作,可以是一个 PyTorch 模型或操作列表。
# 3.n :重复测试的次数,默认为 10 次,用于获取更稳定的性能指标。
# 4.device :指定运行的设备,默认为 None ,表示使用默认设备。
# 5.max_num_obj :用于模拟训练时的预测数量(针对 AutoBatch),默认为 0。
def profile(input, ops, n=10, device=None, max_num_obj=0):
# Ultralytics 速度、内存和 FLOP 分析器。
"""
Ultralytics speed, memory and FLOPs profiler.
Example:
```python
from ultralytics.utils.torch_utils import profile
input = torch.randn(16, 3, 640, 640)
m1 = lambda x: x * torch.sigmoid(x)
m2 = nn.SiLU()
profile(input, [m1, m2], n=100) # profile over 100 iterations
```
"""
# 初始化一个空列表 results ,用于 存储每个操作的性能分析结果 。
results = []
# 如果 device 不是一个 torch.device 对象,则调用 select_device 函数选择合适的设备(CPU 或 GPU)。
if not isinstance(device, torch.device):
device = select_device(device)
# 打印表头,格式化输出性能分析结果的列名,包括 参数数量 、 FLOPs 、 显存占用 、 前向传播时间 、 反向传播时间 、 输入形状 和 输出形状 。
LOGGER.info(
f"{'Params':>12s}{'GFLOPs':>12s}{'GPU_mem (GB)':>14s}{'forward (ms)':>14s}{'backward (ms)':>14s}"
f"{'input':>24s}{'output':>24s}"
)
# 调用 gc.collect() 尝试释放未使用的内存。
gc.collect() # attempt to free unused memory
# 调用 torch.cuda.empty_cache() 清空 CUDA 缓存,确保显存占用量的统计更加准确。
torch.cuda.empty_cache()
# 如果 input 是一个列表,则逐个处理每个输入张量;否则将其包装为一个列表进行处理。
for x in input if isinstance(input, list) else [input]:
# 将输入张量 x 移动到指定设备。
x = x.to(device)
# 并设置 requires_grad=True ,以便在后续计算中支持反向传播。
x.requires_grad = True
# 如果 ops 是一个列表,则逐个处理每个操作;否则将其包装为一个列表进行处理。
for m in ops if isinstance(ops, list) else [ops]:
# 如果操作 m 有 to 方法,则将其移动到指定设备。
m = m.to(device) if hasattr(m, "to") else m # device
# 如果操作 m 支持半精度( half )计算,并且输入张量 x 是半精度类型( torch.float16 ),则将操作转换为半精度。
m = m.half() if hasattr(m, "half") and isinstance(x, torch.Tensor) and x.dtype is torch.float16 else m
# 初始化变量 tf 和 tb ,分别用于记录 前向传播 和 反向传播 的 时间 。
# 初始化列表 t ,用于存储 时间戳 。
tf, tb, t = 0, 0, [0, 0, 0] # dt forward, backward
# 尝试使用 thop 库计算操作 m 的 FLOPs(浮点运算次数),并将结果转换为 GFLOPs(十亿次浮点运算)。
try:
flops = thop.profile(m, inputs=[x], verbose=False)[0] / 1e9 * 2 # GFLOPs
# 如果发生异常(例如 thop 库未安装或操作不支持 FLOPs 计算),则将 FLOPs 设置为 0。
except Exception:
flops = 0
# 这段代码是 profile 函数的核心部分,用于对指定的操作(如 PyTorch 模型或模块)进行性能分析,主要测量前向传播和反向传播的时间以及显存占用情况。
# 开始一个 try 块,用于捕获可能发生的异常,确保性能分析过程的健壮性。
try:
# 初始化变量 mem ,用于累加显存占用量(单位为 GB)。
mem = 0
# 使用 for 循环重复执行性能分析 n 次。 n 是函数参数,用于指定重复测试的次数,以获取更稳定的性能指标。
for _ in range(n):
# 使用 cuda_memory_usage 上下文管理器来监测显存占用情况。 cuda_memory_usage 会在上下文退出时记录显存占用量,并将其存储在 cuda_info 字典中。
with cuda_memory_usage(device) as cuda_info:
# 调用 time_sync() 函数记录当前时间戳,标记前向传播的开始时间。 time_sync() 是一个用于获取同步时间的函数,通常用于确保时间测量的准确性。
t[0] = time_sync()
# 执行前向传播,将输入张量 x 传递给操作 m ,并获取输出 y 。
y = m(x)
# 再次调用 time_sync() 记录当前时间戳,标记前向传播的结束时间。
t[1] = time_sync()
# 尝试执行反向传播。
try:
# 如果输出 y 是一个列表,则对列表中的每个元素调用 .sum() 方法,并对结果求和,然后调用 .backward() 方法执行反向传播。
# 如果输出 y 是一个张量,则直接调用 .sum().backward() 。
(sum(yi.sum() for yi in y) if isinstance(y, list) else y).sum().backward()
# 记录反向传播的结束时间戳 t[2] 。
t[2] = time_sync()
# 如果操作 m 不支持反向传播(例如,某些操作没有梯度),则捕获异常,并将 t[2] 设置为 NaN (表示“非数字”),以标记反向传播时间不可用。
except Exception: # no backward method
# print(e) # for debug
t[2] = float("nan")
# 从 cuda_info 中获取显存占用量(单位为字节),并将其转换为 GB(通过除以 10^9 )。然后将显存占用量累加到 mem 中。
mem += cuda_info["memory"] / 1e9 # (GB)
# 计算前向传播的时间(单位为毫秒),并将其累加到 tf 中。时间通过 t[1] - t[0] 计算得到,并乘以 1000 转换为毫秒。最后,将结果除以 n ,以计算平均前向传播时间。
tf += (t[1] - t[0]) * 1000 / n # ms per op forward
# 计算反向传播的时间(单位为毫秒),并将其累加到 tb 中。时间通过 t[2] - t[1] 计算得到,并乘以 1000 转换为毫秒。最后,将结果除以 n ,以计算平均反向传播时间。
tb += (t[2] - t[1]) * 1000 / n # ms per op backward
# 这段代码通过重复执行前向传播和反向传播操作,测量并记录每次操作的显存占用、前向传播时间和反向传播时间。最终,它计算这些指标的平均值,以提供更稳定的性能分析结果。显存占用通过 cuda_memory_usage 上下文管理器获取,时间测量通过 time_sync 函数实现。此外,代码还处理了可能的异常情况,例如操作不支持反向传播的情况。
# 这段代码的作用是模拟训练过程中每个图像网格的预测数量对显存占用的影响,主要用于 AutoBatch 场景。它通过生成随机张量来模拟预测结果的显存占用,并将其累加到总显存占用中。
# 检查 max_num_obj 是否大于 0 。 max_num_obj 是函数参数,表示每个图像的预测数量。如果大于 0,则进入以下代码块,模拟训练时的预测显存占用。
if max_num_obj: # simulate training with predictions per image grid (for AutoBatch)
# 使用 cuda_memory_usage 上下文管理器来监测显存占用情况。在上下文退出时, cuda_info 字典会记录当前的显存占用量。
with cuda_memory_usage(device) as cuda_info:
# 调用 torch.randn 生成一个随机张量,模拟预测结果的显存占用。
torch.randn(
# 批量大小,表示输入张量的批量维度。
x.shape[0],
# 每个图像的预测数量。
max_num_obj,
# 计算 每个图像的网格单元数量 。 x.shape[-1] 和 x.shape[-2] 分别表示输入张量的宽度和高度, m.stride.tolist() 是模型的步幅列表,用于计算每个网格单元的大小。
int(sum((x.shape[-1] / s) * (x.shape[-2] / s) for s in m.stride.tolist())),
# 将生成的张量放置在指定的设备上。
device=device,
# 指定张量的数据类型为 float32 。
dtype=torch.float32,
)
# 从 cuda_info 中获取显存占用量(单位为字节),并将其转换为 GB(通过除以 10^9 )。然后将显存占用量累加到 mem 中。
mem += cuda_info["memory"] / 1e9 # (GB)
# 这段代码的目的是模拟训练过程中每个图像的预测数量对显存占用的影响。在实际训练中,模型的输出(预测结果)会占用一定的显存,尤其是在使用 AutoBatch 时,预测数量可能会影响显存占用。通过生成随机张量并记录显存占用,可以更准确地评估模型在实际训练中的显存需求。
# 获取输入张量和输出张量的形状。如果输入或输出是张量,则获取其形状;否则标记为 "list" 。
s_in, s_out = (tuple(x.shape) if isinstance(x, torch.Tensor) else "list" for x in (x, y)) # shapes
# 如果操作 m 是一个 PyTorch 模型( nn.Module ),则计算其参数数量;否则参数数量为 0。
p = sum(x.numel() for x in m.parameters()) if isinstance(m, nn.Module) else 0 # parameters
# 打印性能分析结果,包括 参数数量 、 FLOPs 、 显存占用 、 前向传播时间 、 反向传播时间 、 输入形状 和 输出形状 。
LOGGER.info(f"{p:12}{flops:12.4g}{mem:>14.3f}{tf:14.4g}{tb:14.4g}{str(s_in):>24s}{str(s_out):>24s}")
# 将性能分析结果存储到 results 列表中。
results.append([p, flops, mem, tf, tb, s_in, s_out])
# 如果在性能分析过程中发生异常,则打印异常信息,并将结果设置为 None 。
except Exception as e:
LOGGER.info(e)
results.append(None)
# 在每次性能分析结束后,尝试释放未使用的内存,并清空 CUDA 缓存。
finally:
gc.collect() # attempt to free unused memory
torch.cuda.empty_cache()
# 返回性能分析结果列表 results 。包括 参数数量 、 FLOPs 、 显存占用 、 前向传播时间 、 反向传播时间 、 输入形状 和 输出形状 。
return results
# profile 函数是一个功能强大的性能分析工具,用于评估 PyTorch 模型或操作的速度、显存占用和 FLOPs。它支持对多个输入和操作进行批量分析,并提供了详细的性能指标,包括参数数量、FLOPs、显存占用、前向传播时间和反向传播时间。此外,该函数还支持模拟训练时的预测数量,适用于 AutoBatch 等场景。通过 LOGGER 打印的性能分析结果,用户可以直观地了解模型或操作的性能表现。
# def profile(input, ops, n=10, device=None, max_num_obj=0): -> 用于对 PyTorch 模型或操作进行性能分析,包括速度、显存占用和 FLOPs(浮点运算次数)。返回性能分析结果列表 results 。包括 参数数量 、 FLOPs 、 显存占用 、 前向传播时间 、 反向传播时间 、 输入形状 和 输出形状 。 -> return results31.class EarlyStopping:
# 这段代码定义了一个名为 EarlyStopping 的类,用于实现早停机制(Early Stopping)。早停机制是一种常用的训练技巧,用于在验证集性能不再提升时提前终止训练,以避免过拟合并节省计算资源。
# 定义了一个名为 EarlyStopping 的类,用于实现早停机制。
class EarlyStopping:
# 早期停止类,当经过指定数量的时期而没有改进时停止训练。
"""Early stopping class that stops training when a specified number of epochs have passed without improvement."""
# 定义了类的初始化方法,接受一个参数。
# 1.patience :耐心值(默认为 50),表示在验证集性能没有提升的情况下,允许等待的最大 epoch 数。
def __init__(self, patience=50):
# 初始化早期停止对象。
"""
Initialize early stopping object.
Args:
patience (int, optional): Number of epochs to wait after fitness stops improving before stopping.
"""
# 初始化 best_fitness 属性,表示到目前为止观察到的最佳性能(例如 mAP,即平均精度)。初始值为 0.0 。
self.best_fitness = 0.0 # i.e. mAP
# 初始化 best_epoch 属性,表示观察到最佳性能的 epoch 编号。初始值为 0 。
self.best_epoch = 0
# 将传入的 patience 参数赋值给 self.patience 。如果 patience 为 None ,则将其设置为无穷大( float("inf") ),表示不会触发早停。
self.patience = patience or float("inf") # epochs to wait after fitness stops improving to stop
# 初始化 possible_stop 属性,表示是否可能在下一个 epoch 触发早停。初始值为 False 。
self.possible_stop = False # possible stop may occur next epoch
# 定义了一个可调用方法 __call__ ,允许类实例像函数一样被调用。它接受两个参数。
# 1.epoch :当前 epoch 编号。
# fitness :当前 epoch 的性能指标(例如 mAP)。
def __call__(self, epoch, fitness):
# 检查是否停止训练。
"""
Check whether to stop training.
Args:
epoch (int): Current epoch of training
fitness (float): Fitness value of current epoch
Returns:
(bool): True if training should stop, False otherwise
"""
# 检查 fitness 是否为 None 。如果为 None ,表示当前 epoch 没有验证集性能指标(可能是因为没有进行验证),直接返回 False ,表示不触发早停。
if fitness is None: # check if fitness=None (happens when val=False)
return False
# 检查当前性能指标是否优于或等于最佳性能指标。
if fitness >= self.best_fitness: # >= 0 to allow for early zero-fitness stage of training
# 如果是,则更新 best_epoch 和 best_fitness ,表示当前 epoch 的性能是迄今为止最好的。
self.best_epoch = epoch
self.best_fitness = fitness
# 计算自最佳性能以来经过的 epoch 数( delta )。如果 delta 较大,说明性能已经很久没有提升。
delta = epoch - self.best_epoch # epochs without improvement
# 如果 delta 大于或等于 patience - 1 ,将 possible_stop 设置为 True ,表示可能在下一个 epoch 触发早停。
self.possible_stop = delta >= (self.patience - 1) # possible stop may occur next epoch
# 如果 delta 大于或等于 patience ,表示已经达到了耐心阈值,触发早停。
stop = delta >= self.patience # stop training if patience exceeded
# 如果触发了早停,执行以下操作。
if stop:
# 使用 LOGGER.info 记录一条信息,提示用户训练已提前终止,并提供最佳性能所在的 epoch 编号和保存的最佳模型路径。 提供关于如何更新 patience 的建议,例如通过设置 patience=300 或 patience=0 来禁用早停。
prefix = colorstr("EarlyStopping: ") # 提前停止:
LOGGER.info(
f"{prefix}Training stopped early as no improvement observed in last {self.patience} epochs. " # {prefix}由于在最后 {self.patience} 个时期没有观察到任何改善,因此训练提前停止。
f"Best results observed at epoch {self.best_epoch}, best model saved as best.pt.\n" # 在时期 {self.best_epoch} 观察到的最佳结果,最佳模型保存为 best.pt。
f"To update EarlyStopping(patience={self.patience}) pass a new patience value, " # 要更新 EarlyStopping(patience={self.patience}),请传递一个新的耐心值,
f"i.e. `patience=300` or use `patience=0` to disable EarlyStopping." # 即 `patience=300` 或使用 `patience=0` 来禁用 EarlyStopping。
)
# 返回一个布尔值,表示是否触发了早停。
return stop
# EarlyStopping 类实现了一个早停机制,用于在验证集性能不再提升时提前终止训练。它的主要特点包括。性能跟踪:跟踪最佳性能指标( best_fitness )和对应的 epoch 编号( best_epoch )。耐心机制:设置一个耐心值( patience ),表示在性能没有提升的情况下允许等待的最大 epoch 数。灵活的触发条件:如果性能没有提升的 epoch 数达到 patience ,触发早停。提供 possible_stop 属性,表示可能在下一个 epoch 触发早停。日志记录:如果触发早停,记录一条详细的信息,提示用户训练已提前终止,并提供相关建议。可调用接口:使用 __call__ 方法,允许类实例像函数一样被调用,方便在训练循环中直接使用。这种设计使得 EarlyStopping 类能够灵活地应用于深度学习模型的训练过程中,帮助开发者避免过拟合并节省计算资源。32.class FXModel(nn.Module):
# 这段代码定义了一个名为 FXModel 的类,继承自 PyTorch 的 nn.Module 。它的作用是封装一个给定的模型,并通过逐层处理输入数据来实现前向传播。这种设计通常用于模型的分析、调试或转换(例如,将模型转换为 FX 图表示)。
# 定义了一个继承自 nn.Module 的类 FXModel 。这使得 FXModel 可以像普通的 PyTorch 模型一样使用。
class FXModel(nn.Module):
# 用于 torch.fx 兼容性的自定义模型类。
# 此类扩展了 `torch.nn.Module`,旨在确保与 torch.fx 兼容,以进行跟踪和图形操作。
# 它从现有模型复制属性,并明确设置模型属性以确保正确复制。
"""
A custom model class for torch.fx compatibility.
This class extends `torch.nn.Module` and is designed to ensure compatibility with torch.fx for tracing and graph manipulation.
It copies attributes from an existing model and explicitly sets the model attribute to ensure proper copying.
Args:
model (torch.nn.Module): The original model to wrap for torch.fx compatibility.
"""
# 定义了类的初始化方法,接受一个参数。
# 1.model :需要封装的模型。这个模型通常是一个包含多个子模块的复杂模型。
def __init__(self, model):
# 初始化 FXModel。
"""
Initialize the FXModel.
Args:
model (torch.nn.Module): The original model to wrap for torch.fx compatibility.
"""
# 调用父类 nn.Module 的初始化方法,完成必要的初始化操作。
super().__init__()
# 调用 copy_attr 函数,将 model 的属性复制到 self 中。这一步确保了 FXModel 实例继承了原始模型的大部分属性。
# def copy_attr(a, b, include=(), exclude=()): -> 用于将一个对象 b 的属性复制到另一个对象 a 中。它还提供了选项来包含或排除某些属性。使用 setattr 函数将属性 k 的值 v 设置到目标对象 a 中。 setattr(a, k, v) 等价于 a.k = v 。
copy_attr(self, model)
# Explicitly set `model` since `copy_attr` somehow does not copy it.
# 显式地将 model.model 赋值给 self.model 。这一步是必要的,因为 copy_attr 函数可能没有复制 model 的某些属性(例如嵌套的 model 属性)。
self.model = model.model
# 定义了 FXModel 的前向传播方法 forward ,接受一个输入张量 1.x 。
def forward(self, x):
# 正向传递模型。
# 此方法执行正向传递模型,处理层之间的依赖关系并保存中间输出。
"""
Forward pass through the model.
This method performs the forward pass through the model, handling the dependencies between layers and saving intermediate outputs.
Args:
x (torch.Tensor): The input tensor to the model.
Returns:
(torch.Tensor): The output tensor from the model.
"""
# 初始化一个空列表 y ,用于存储每一层的输出。这些输出可能在后续层中被引用。
y = [] # outputs
# 遍历封装的模型 self.model 中的每个子模块 m 。
for m in self.model:
# 检查当前模块 m 是否依赖于之前的层的输出。 m.f 是一个属性,表示当前模块的输入来源。 如果 m.f == -1 ,表示当前模块的输入直接来自上一层的输出 x 。 如果 m.f != -1 ,表示当前模块的输入来自其他层的输出。
if m.f != -1: # if not from previous layer
# from earlier layers
# 根据 m.f 的值,获取当前模块的输入。
# 如果 m.f 是一个整数,直接从 y 中获取对应的输出。
# 如果 m.f 是一个列表(表示当前模块依赖多个层的输出),则生成一个包含多个输入的列表。
# 如果 j == -1 ,表示输入来自上一层的输出 x 。
# 否则,从 y 中获取对应的输出。
x = y[m.f] if isinstance(m.f, int) else [x if j == -1 else y[j] for j in m.f]
# 将输入 x 传递给当前模块 m ,执行前向传播。
x = m(x) # run
# 将当前模块的输出 x 保存到列表 y 中,以便后续模块可以引用。
y.append(x) # save output
# 返回最终的输出 x ,即整个模型的前向传播结果。
return x
# FXModel 类的主要功能是封装一个给定的模型,并通过逐层处理输入数据来实现前向传播。它的主要特点包括。模型封装:使用 copy_attr 函数将原始模型的属性复制到 FXModel 实例中。显式地设置 self.model ,确保模型的结构被正确封装。逐层前向传播:遍历模型中的每个子模块,逐层处理输入数据。支持从多个层获取输入(通过 m.f 属性)。灵活性:通过 y 列表保存每一层的输出,支持复杂的模型结构(例如,具有跳跃连接的模型)。应用场景:这种设计通常用于模型的分析、调试或转换。例如,可以将模型转换为 FX 图表示,用于进一步的优化或部署。通过这种方式, FXModel 类提供了一种灵活的方式来封装和处理复杂模型的前向传播过程。

有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐

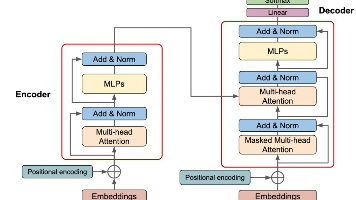
 23
23 0
0- 0



 已为社区贡献22条内容
已为社区贡献22条内容

所有评论(0)