工程(九)——Deeplabv3+ 结合LeGO_LOAM语义SLAM
参见:工程(二)——DeeplabV3+语义分割训练自制数据集三、激光雷达与相机融合1、标定如果激光雷达在相机的坐标系关系想上图这样,数值可以直接用。DistCoeff1矩阵不要动,我也不知道为什么,但使用标定后的数值效果不好。2、融合 得到彩色点云需要将点云类型更改,参见 工程(一)Lego_Loam安装调试及运行。得到语义点云地图参见 工程(四)——Kitti转bag跑Lego-LOAM,因为
·
目录
博主创建了一个科研互助群Q:772356582,欢迎大家加入讨论。
一、训练Deeplabv3+网络
参见:工程(二)——DeeplabV3+语义分割训练自制数据集
二、将DeeplabV3+改成ROS节点
import roslib
import rospy
from std_msgs.msg import Header
from std_msgs.msg import String
from sensor_msgs.msg import Image
from torch.utils.data import dataset
from tqdm import tqdm
import network
import utils
import os
os.environ['CUDA_VISIBLE_DEVICES'] = "0"
import random
import argparse
import numpy as np
from torch.utils import data
from datasets import VOCSegmentation, Cityscapes, cityscapes
from torchvision import transforms as T
from metrics import StreamSegMetrics
import torch
import torch.nn as nn
from PIL import Image as IM
import matplotlib
import matplotlib.pyplot as plt
def get_argparser():
parser = argparse.ArgumentParser()
# Deeplab Options
available_models = sorted(name for name in network.modeling.__dict__ if name.islower() and \
not (name.startswith("__") or name.startswith('_')) and callable(
network.modeling.__dict__[name])
)
parser.add_argument("--separable_conv", action='store_true', default=False,
help="apply separable conv to decoder and aspp")
parser.add_argument("--output_stride", type=int, default=16, choices=[8, 16])
# Train Options
parser.add_argument("--crop_val", action='store_true', default=False,
help='crop validation (default: False)')
parser.add_argument("--val_batch_size", type=int, default=4,
help='batch size for validation (default: 4)')
parser.add_argument("--crop_size", type=int, default=513)
parser.add_argument("--gpu_id", type=str, default='0',
help="GPU ID")
return parser
class SubscribeAndPublish:
def __init__(self):
self.all_obstacle_str=''
self.sub1_name="/cam_rgb1/usb_cam/image_raw"
self.sub2_name="/cam_rgb2/usb_cam/image_raw"
self.sub3_name="/cam_rgb3/usb_cam/image_raw"
self.sub4_name="/cam_rgb4/usb_cam/image_raw"
print("waite")
self.sub1= rospy.Subscriber(self.sub1_name,Image,self.callback_rgb1)
self.sub2= rospy.Subscriber(self.sub2_name,Image,self.callback_rgb2)
self.sub3= rospy.Subscriber(self.sub3_name,Image,self.callback_rgb3)
self.sub4= rospy.Subscriber(self.sub4_name,Image,self.callback_rgb4)
self.pub1_name="forward"
self.pub1= rospy.Publisher(self.pub1_name, Image,queue_size=10)
self.pub2_name="right"
self.pub2= rospy.Publisher(self.pub2_name, Image,queue_size=10)
self.pub3_name="back"
self.pub3= rospy.Publisher(self.pub3_name, Image,queue_size=10)
self.pub4_name="left"
self.pub4= rospy.Publisher(self.pub4_name, Image,queue_size=10)
self.model=model
self.img_rgb=[]
self.colorized_preds=[]
self.colorized_preds2=[]
self.timestr=[]
def callback_rgb1(self,data):
print('callback')
with torch.no_grad():
self.timestr = data.header.stamp
print(self.timestr)
model = self.model.eval()
img_rgb = np.frombuffer(data.data, dtype=np.uint8).reshape(data.height, data.width, -1)
print(img_rgb.shape)
print(type(img_rgb))
#img_rgb=img_rgb[:,:,::-1]#的作用就是实现RGB到BGR通道的转换 (若图片一开始就是BGR的,就是实现从BGR到RGB的转换)
img_rgb = transform(img_rgb).unsqueeze(0) # To tensor of NCHW
print(img_rgb.shape) #([1, 3, 480, 640])
img_rgb = img_rgb.to(device)
pred = model(img_rgb).max(1)[1].cpu().numpy()[0] # HW
colorized_preds = decode_fn(pred).astype('uint8')
#print(colorized_preds)
self.publish_image(self.pub1,colorized_preds,'base_link')
def callback_rgb2(self,data):
print('callback')
with torch.no_grad():
self.timestr = data.header.stamp
print(self.timestr)
model = self.model.eval()
img_rgb = np.frombuffer(data.data, dtype=np.uint8).reshape(data.height, data.width, -1)
print(img_rgb.shape)
print(type(img_rgb))
#img_rgb=img_rgb[:,:,::-1]#的作用就是实现RGB到BGR通道的转换 (若图片一开始就是BGR的,就是实现从BGR到RGB的转换)
img_rgb = transform(img_rgb).unsqueeze(0) # To tensor of NCHW
print(img_rgb.shape) #([1, 3, 480, 640])
img_rgb = img_rgb.to(device)
pred = model(img_rgb).max(1)[1].cpu().numpy()[0] # HW
colorized_preds = decode_fn(pred).astype('uint8')
#print(colorized_preds)
self.publish_image(self.pub2,colorized_preds,'base_link')
def callback_rgb3(self,data):
print('callback')
with torch.no_grad():
self.timestr = data.header.stamp
print(self.timestr)
model = self.model.eval()
img_rgb = np.frombuffer(data.data, dtype=np.uint8).reshape(data.height, data.width, -1)
print(img_rgb.shape)
print(type(img_rgb))
#img_rgb=img_rgb[:,:,::-1]#的作用就是实现RGB到BGR通道的转换 (若图片一开始就是BGR的,就是实现从BGR到RGB的转换)
img_rgb = transform(img_rgb).unsqueeze(0) # To tensor of NCHW
print(img_rgb.shape) #([1, 3, 480, 640])
img_rgb = img_rgb.to(device)
pred = model(img_rgb).max(1)[1].cpu().numpy()[0] # HW
colorized_preds = decode_fn(pred).astype('uint8')
#print(colorized_preds)
self.publish_image(self.pub3,colorized_preds,'base_link')
def callback_rgb4(self,data):
print('callback')
with torch.no_grad():
self.timestr = data.header.stamp
print(self.timestr)
model = self.model.eval()
img_rgb = np.frombuffer(data.data, dtype=np.uint8).reshape(data.height, data.width, -1)
print(img_rgb.shape)
print(type(img_rgb))
#img_rgb=img_rgb[:,:,::-1]#的作用就是实现RGB到BGR通道的转换 (若图片一开始就是BGR的,就是实现从BGR到RGB的转换)
img_rgb = transform(img_rgb).unsqueeze(0) # To tensor of NCHW
print(img_rgb.shape) #([1, 3, 480, 640])
img_rgb = img_rgb.to(device)
pred = model(img_rgb).max(1)[1].cpu().numpy()[0] # HW
colorized_preds = decode_fn(pred).astype('uint8')
#print(colorized_preds)
self.publish_image(self.pub4,colorized_preds,'base_link')
def publish_image(self,pub, data, frame_id='base_link'):
#shape是numpy的使用方法,PIL图片不能发送
assert len(data.shape) == 3, 'len(data.shape) must be equal to 3.'
time = self.timestr
print(time)
header = Header(stamp=time)
header.frame_id = frame_id
msg = Image()
msg.height = data.shape[0]
msg.width = data.shape[1]
msg.encoding = 'rgb8'
msg.data = np.array(data).tostring()
msg.header = header
msg.step = msg.width * 1 * 3
pub.publish(msg)
def mian(opts,model,device):
rospy.init_node('sem_image', anonymous=True)
#####################
t=SubscribeAndPublish()
#####################
rate = rospy.Rate(10)
while not rospy.is_shutdown():
rate.sleep()
if __name__ == '__main__':
opts = get_argparser().parse_args()
weights = '/home/cxl/sem_slam/src/DeepLabV3Plus-Pytorch/weights/best_deeplabv3plus_mobilenet_cityscapes_os16.pth'
dataset = 'cityscapes'
model_choice = 'deeplabv3plus_mobilenet'
if dataset.lower() == 'cityscapes':
opts.num_classes = 19
decode_fn = Cityscapes.decode_target
#device = torch.device('cuda:0')
device = torch.device('cuda' if torch.cuda.is_available() else 'cpu')
print("Device: %s" % device)
#加载模型
model = network.modeling.__dict__[model_choice](num_classes=opts.num_classes, output_stride=opts.output_stride)
if opts.separable_conv and 'plus' in model_choice:
network.convert_to_separable_conv(model.classifier)
utils.set_bn_momentum(model.backbone, momentum=0.01)
if weights is not None and os.path.isfile(weights):
# https://github.com/VainF/DeepLabV3Plus-Pytorch/issues/8#issuecomment-605601402, @PytaichukBohdan
checkpoint = torch.load(weights, map_location=torch.device('cpu'))
model.load_state_dict(checkpoint["model_state"])
model = nn.DataParallel(model)
model.to(device)
print("Resume model from %s" % weights)
del checkpoint
else:
print("[!] Retrain")
model = nn.DataParallel(model)
model.to(device)
if opts.crop_val:
transform = T.Compose([
T.Resize(opts.crop_size),
T.CenterCrop(opts.crop_size),
T.ToTensor(),
T.Normalize(mean=[0.485, 0.456, 0.406],
std=[0.229, 0.224, 0.225]),
])
else:
transform = T.Compose([
T.ToTensor(),
T.Normalize(mean=[0.485, 0.456, 0.406],
std=[0.229, 0.224, 0.225]),
])
mian(opts,model,device)三、激光雷达与相机融合
1、标定
\ / Initial rotation: 正
\ |z/ [0 -1 0]
\|/ [0 0 -1]
█————x [1 0 0]
forward => (pi/2, -pi/2, 0) Euler angles
cam_1 Final rotation = Average rotation * Initial rotation
█████
左 |x ██ |x ██ 右
[1 0 0] | █ | █ [-1 0 0]
[0 0 -1] z————█ cam_4 █ y———.z █ cam_2 █————z [0 0 -1] 垂直角度 越大越偏上
[0 1 0] █ █ | [0 -1 0]
=> (pi/2, 0, 0) ██ ██ |x => (-pi/2, 0, pi)
█████
lidar
后
x————█ [0 1 0]
| [0 0 -1]
|z [-1 0 0]
cam_3 => (pi/2, pi/2, 0)如果激光雷达在相机的坐标系关系想上图这样,数值可以直接用。
DistCoeff1矩阵不要动,我也不知道为什么,但使用标定后的数值效果不好。
%YAML:1.0
---
CameraMat1: !!opencv-matrix
rows: 3
cols: 3
dt: d
data: [ 779.4823653921954, 0, 628.6914694726269, 0, 777.5860335839923, 398.4173447627671, 0, 0, 1]
DistCoeff1: !!opencv-matrix
rows: 1
cols: 5
dt: d
data: [ -0.312987, 0.065093,
-0.000877, 0.001404, 0. ]
ImageSize: [ 1280, 720 ]
CameraExtrinsicMat1: !!opencv-matrix
rows: 4
cols: 4
dt: d
data: [0, -1, 0.0, 0.0,
-0.0, 0.0,-1, 0.0,
1, 0, -0, 0.0,
0, 0, 0, 1]
RotationAngleX: 0
RotationAngleY: 0
RotationAngleZ: 0
CameraMat2: !!opencv-matrix
rows: 3
cols: 3
dt: d
data: [ 910.2603176274889, 0, 542.1988949090693, 0, 913.5108570297829, 400.3122035884714, 0, 0, 1 ]
DistCoeff2: !!opencv-matrix
rows: 1
cols: 5
dt: d
data: [ -0.312987, 0.065093,
-0.000877, 0.001404, 0. ]
CameraExtrinsicMat2: !!opencv-matrix
rows: 4
cols: 4
dt: d
data: [-1,0, 0, 0.0,
0.0, 0,-1, 0.0,
0, -1, 0, 0.0,
0, 0, 0, 1]
CameraMat3: !!opencv-matrix
rows: 3
cols: 3
dt: d
data: [ 791.1871961164622, 0, 607.2790605039955, 0, 791.971996567776, 383.3458438299946, 0, 0, 1 ]
DistCoeff3: !!opencv-matrix
rows: 1
cols: 5
dt: d
data: [ -0.312987, 0.065093,
-0.000877, 0.001404, 0. ]
CameraExtrinsicMat3: !!opencv-matrix
rows: 4
cols: 4
dt: d
data: [0, 1, 0.0, 0.0,
0.0, 0.0,-1, 0.0,
-1, 0, 0, 0.0,
0, 0, 0, 1]
CameraMat4: !!opencv-matrix
rows: 3
cols: 3
dt: d
data: [729.2259063806434, 0, 615.9769923710511, 0, 732.3859625368948, 385.7840730294312, 0, 0, 1]
DistCoeff4: !!opencv-matrix
rows: 1
cols: 5
dt: d
data: [ -0.312987, 0.065093,
-0.000877, 0.001404, 0. ]
CameraExtrinsicMat4: !!opencv-matrix
rows: 4
cols: 4
dt: d
data: [1, 0, 0.0, 0.0,
0.0, 0.0,-1, 0.0,
0, 1, 0, 0.0,
0, 0, 0, 1]
2、融合 得到彩色点云
#include <ros/ros.h>
#include <boost/bind.hpp>
#include <Eigen/Dense>
#include <opencv2/opencv.hpp>
#include <sensor_msgs/Image.h>
#include <sensor_msgs/CompressedImage.h>
#include <sensor_msgs/PointCloud2.h>
#include <std_msgs/Header.h>
#include <message_filters/subscriber.h>
#include <message_filters/synchronizer.h>
#include <message_filters/sync_policies/approximate_time.h>
#include <message_filters/sync_policies/exact_time.h>
#include <image_transport/image_transport.h>
#include <sensor_msgs/image_encodings.h>
#include <cv_bridge/cv_bridge.h>
#include <pcl/point_cloud.h>
#include <pcl/point_types.h>
#include <pcl_conversions/pcl_conversions.h>
#include <pcl/common/transforms.h>
#include <pcl/visualization/pcl_visualizer.h>
#include <pcl/io/pcd_io.h>
#include <pcl/filters/filter.h>
#include <math.h>
#include "colored_pointcloud/colored_pointcloud.h"
#include <sys/stat.h>
#include <sys/types.h>
#include <cstdio>
#include <ctime>
#define YELLOW "\033[33m" /* Yellow */
#define GREEN "\033[32m" /* Green */
#define REND "\033[0m" << std::endl
#define WARN (std::cout << YELLOW)
#define INFO (std::cout << GREEN)
using namespace std;
using namespace cv;
using namespace sensor_msgs;
using namespace message_filters;
// colored_cloud_pub;
class RsCamFusion
{
//**********************************************************************************************************
//1、定义成员变量
private:
typedef message_filters::sync_policies::ApproximateTime<sensor_msgs::Image,sensor_msgs::Image,sensor_msgs::Image,sensor_msgs::Image,sensor_msgs::PointCloud2> slamSyncPolicy;
message_filters::Synchronizer<slamSyncPolicy>* sync_;
message_filters::Subscriber<sensor_msgs::Image>* camera_sub1;
message_filters::Subscriber<sensor_msgs::Image>* camera_sub2;
message_filters::Subscriber<sensor_msgs::Image>* camera_sub3;
message_filters::Subscriber<sensor_msgs::Image>* camera_sub4;
message_filters::Subscriber<sensor_msgs::PointCloud2>* lidar_sub;
pcl::PointCloud<pcl::PointXYZI>::Ptr input_cloud;
pcl::PointCloud<pcl::PointXYZI>::Ptr out_cloud;
pcl::PointCloud<pcl::PointXYZI>::Ptr input_cloud_ptr;
pcl::PointCloud<pcl::PointXYZI>::Ptr transformed_cloud;
pcl::PointCloud<pcl::PointXYZI>::Ptr lidar_points;
pcl::PointCloud<PointXYZRGBI>::Ptr colored_cloud;
pcl::PointCloud<PointXYZRGBI>::Ptr colored_cloud_toshow;
pcl::PointCloud<PointXYZRGBI>::Ptr colored_cloud_transback;
std::vector<cv::Point2d> imagePoints;
ros::NodeHandle nh;
ros::NodeHandle priv_nh;
ros::Publisher fused_image_pub;
ros::Publisher fused_image_pub1;
ros::Publisher fused_image_pub2;
ros::Publisher fused_image_pub3;
ros::Publisher fused_image_pub4;
ros::Publisher colored_cloud_showpub;
ros::Publisher point_cloud;
cv::Mat intrinsic1;
cv::Mat intrinsic2;
cv::Mat intrinsic3;
cv::Mat intrinsic4;
cv::Mat extrinsic1;
cv::Mat extrinsic2;
cv::Mat extrinsic3;
cv::Mat extrinsic4;
cv::Mat distcoeff1;
cv::Mat distcoeff2;
cv::Mat distcoeff3;
cv::Mat distcoeff4;
cv::Size imageSize;
cv::Mat input_image;
cv::Mat image_to_show;
cv::Mat image_to_show1,image_to_show2,image_to_show3,image_to_show4,all_image;
Eigen::Matrix4d transform1;
Eigen::Matrix4d transform2;
Eigen::Matrix4d transform3;
Eigen::Matrix4d transform4;
Eigen::Matrix4d inv_transform1;
Eigen::Matrix4d inv_transform2;
Eigen::Matrix4d inv_transform3;
Eigen::Matrix4d inv_transform4;
cv::Mat rVec = cv::Mat::zeros(3, 1, CV_64FC1); // Rotation vector
cv::Mat rMat = cv::Mat::eye(3, 3, CV_64FC1);
cv::Mat tVec = cv::Mat::zeros(3, 1, CV_64FC1); // Translation vector
bool show_colored_cloud;
int color[21][3] =
{
{255, 0, 0}, {255, 69, 0}, {255, 99, 71},
{255, 140, 0}, {255, 165, 0}, {238, 173, 14},
{255, 193, 37}, {255, 255, 0}, {255, 236, 139},
{202, 255, 112}, {0, 255, 0}, {84, 255, 159},
{127, 255, 212}, {0, 229, 238}, {152, 245, 255},
{178, 223, 238}, {126, 192, 238}, {28, 134, 238},
{0, 0, 255}, {72, 118, 255}, {122, 103, 238}
};
std::string image_save_dir, cloud_save_dir, colored_cloud_save_dir;
float color_distance; //step length to color the lidar points according to plane distance(z)
int frame_count = 0;
std::string config_path, file_name;
std::string camera_topic1,camera_topic2,camera_topic3,camera_topic4,lidar_topic;
float color_dis;
bool show_cloud, save_data;
int m;
pcl::PointCloud<pcl::PointXYZI>::Ptr input;
public:
//**********************************************************************************************************
//2、定义构造函数 传入参数
RsCamFusion():
priv_nh("~"){
//从launch引入参数
if (priv_nh.hasParam("calib_file_path") && priv_nh.hasParam("file_name"))
{
priv_nh.getParam("camera_topic1", camera_topic1);
priv_nh.getParam("camera_topic2", camera_topic2);
priv_nh.getParam("camera_topic3", camera_topic3);
priv_nh.getParam("camera_topic4", camera_topic4);
priv_nh.getParam("lidar_topic", lidar_topic);
priv_nh.getParam("calib_file_path", config_path);
priv_nh.getParam("file_name", file_name);
priv_nh.getParam("color_distance", color_dis);
priv_nh.getParam("show_colored_cloud", show_cloud);
priv_nh.getParam("save_data", save_data);
}
else
{
WARN << "Config file is empty!" << REND;
//return 0;在构造函数里不能返回值
}
INFO << "config path: " << config_path << REND;
INFO << "config file: " << file_name << REND;
std::string config_file_name = config_path + "/" + file_name;
cv::FileStorage fs_reader(config_file_name, cv::FileStorage::READ);
cv::Mat cam_intrinsic1,cam_intrinsic2,cam_intrinsic3,cam_intrinsic4,
lidar2cam_extrinsic1,lidar2cam_extrinsic2,lidar2cam_extrinsic3,lidar2cam_extrinsic4,
cam_distcoeff1,cam_distcoeff2,cam_distcoeff3,cam_distcoeff4;
cv::Size img_size;
fs_reader["CameraMat1"] >> cam_intrinsic1;
fs_reader["CameraMat2"] >> cam_intrinsic2;
fs_reader["CameraMat3"] >> cam_intrinsic3;
fs_reader["CameraMat4"] >> cam_intrinsic4;
fs_reader["CameraExtrinsicMat1"] >> lidar2cam_extrinsic1;
fs_reader["CameraExtrinsicMat2"] >> lidar2cam_extrinsic2;
fs_reader["CameraExtrinsicMat3"] >> lidar2cam_extrinsic3;
fs_reader["CameraExtrinsicMat4"] >> lidar2cam_extrinsic4;
fs_reader["DistCoeff1"] >> cam_distcoeff1;
fs_reader["DistCoeff2"] >> cam_distcoeff2;
fs_reader["DistCoeff3"] >> cam_distcoeff3;
fs_reader["DistCoeff4"] >> cam_distcoeff4;
fs_reader["ImageSize"] >> img_size;
fs_reader.release();
//2、加入雷达和相机的数据|| camera_topic2.empty()|| camera_topic3.empty()|| camera_topic4.empty()
if (lidar_topic.empty() || camera_topic1.empty())
{
WARN << "sensor topic is empty!" << REND;
//return 0;
}
INFO << "lidar topic: " << lidar_topic << REND;//雷达数据
INFO << "camera topic1: " << camera_topic1 << REND;//相机数据
INFO << "camera topic2: " << camera_topic2 << REND;//相机数据
INFO << "camera topic3: " << camera_topic3 << REND;//相机数据
INFO << "camera topic4: " << camera_topic4 << REND;//相机数据
INFO << "camera intrinsic matrix1: " << cam_intrinsic1 << REND;//相机内参矩阵
INFO << "camera intrinsic matrix2: " << cam_intrinsic2 << REND;//相机内参矩阵
INFO << "camera intrinsic matrix3: " << cam_intrinsic3 << REND;//相机内参矩阵
INFO << "camera intrinsic matrix4: " << cam_intrinsic4 << REND;//相机内参矩阵
intrinsic1 = cam_intrinsic1;//内参矩阵
intrinsic2 = cam_intrinsic2;//内参矩阵
intrinsic3 = cam_intrinsic3;//内参矩阵
intrinsic4 = cam_intrinsic4;//内参矩阵
extrinsic1 = lidar2cam_extrinsic1;//外参矩阵
extrinsic2 = lidar2cam_extrinsic2;//外参矩阵
extrinsic3 = lidar2cam_extrinsic3;//外参矩阵
extrinsic4 = lidar2cam_extrinsic4;//外参矩阵
distcoeff1 = cam_distcoeff1;
distcoeff2 = cam_distcoeff2;
distcoeff3 = cam_distcoeff3;
distcoeff4 = cam_distcoeff4;
//传入外参
transform1(0,0) = extrinsic1.at<double>(0,0);
transform1(0,1) = extrinsic1.at<double>(0,1);
transform1(0,2) = extrinsic1.at<double>(0,2);
transform1(0,3) = extrinsic1.at<double>(0,3);
transform1(1,0) = extrinsic1.at<double>(1,0);
transform1(1,1) = extrinsic1.at<double>(1,1);
transform1(1,2) = extrinsic1.at<double>(1,2);
transform1(1,3) = extrinsic1.at<double>(1,3);
transform1(2,0) = extrinsic1.at<double>(2,0);
transform1(2,1) = extrinsic1.at<double>(2,1);
transform1(2,2) = extrinsic1.at<double>(2,2);
transform1(2,3) = extrinsic1.at<double>(2,3);
transform1(3,0) = extrinsic1.at<double>(3,0);
transform1(3,1) = extrinsic1.at<double>(3,1);
transform1(3,2) = extrinsic1.at<double>(3,2);
transform1(3,3) = extrinsic1.at<double>(3,3);
inv_transform1 = transform1.inverse(); //逆序
//传入外参
transform2(0,0) = extrinsic2.at<double>(0,0);
transform2(0,1) = extrinsic2.at<double>(0,1);
transform2(0,2) = extrinsic2.at<double>(0,2);
transform2(0,3) = extrinsic2.at<double>(0,3);
transform2(1,0) = extrinsic2.at<double>(1,0);
transform2(1,1) = extrinsic2.at<double>(1,1);
transform2(1,2) = extrinsic2.at<double>(1,2);
transform2(1,3) = extrinsic2.at<double>(1,3);
transform2(2,0) = extrinsic2.at<double>(2,0);
transform2(2,1) = extrinsic2.at<double>(2,1);
transform2(2,2) = extrinsic2.at<double>(2,2);
transform2(2,3) = extrinsic2.at<double>(2,3);
transform2(3,0) = extrinsic2.at<double>(3,0);
transform2(3,1) = extrinsic2.at<double>(3,1);
transform2(3,2) = extrinsic2.at<double>(3,2);
transform2(3,3) = extrinsic2.at<double>(3,3);
inv_transform2 = transform2.inverse(); //逆序
//传入外参
transform3(0,0) = extrinsic3.at<double>(0,0);
transform3(0,1) = extrinsic3.at<double>(0,1);
transform3(0,2) = extrinsic3.at<double>(0,2);
transform3(0,3) = extrinsic3.at<double>(0,3);
transform3(1,0) = extrinsic3.at<double>(1,0);
transform3(1,1) = extrinsic3.at<double>(1,1);
transform3(1,2) = extrinsic3.at<double>(1,2);
transform3(1,3) = extrinsic3.at<double>(1,3);
transform3(2,0) = extrinsic3.at<double>(2,0);
transform3(2,1) = extrinsic3.at<double>(2,1);
transform3(2,2) = extrinsic3.at<double>(2,2);
transform3(2,3) = extrinsic3.at<double>(2,3);
transform3(3,0) = extrinsic3.at<double>(3,0);
transform3(3,1) = extrinsic3.at<double>(3,1);
transform3(3,2) = extrinsic3.at<double>(3,2);
transform3(3,3) = extrinsic3.at<double>(3,3);
inv_transform3 = transform3.inverse(); //逆序
//传入外参
transform4(0,0) = extrinsic4.at<double>(0,0);
transform4(0,1) = extrinsic4.at<double>(0,1);
transform4(0,2) = extrinsic4.at<double>(0,2);
transform4(0,3) = extrinsic4.at<double>(0,3);
transform4(1,0) = extrinsic4.at<double>(1,0);
transform4(1,1) = extrinsic4.at<double>(1,1);
transform4(1,2) = extrinsic4.at<double>(1,2);
transform4(1,3) = extrinsic4.at<double>(1,3);
transform4(2,0) = extrinsic4.at<double>(2,0);
transform4(2,1) = extrinsic4.at<double>(2,1);
transform4(2,2) = extrinsic4.at<double>(2,2);
transform4(2,3) = extrinsic4.at<double>(2,3);
transform4(3,0) = extrinsic4.at<double>(3,0);
transform4(3,1) = extrinsic4.at<double>(3,1);
transform4(3,2) = extrinsic4.at<double>(3,2);
transform4(3,3) = extrinsic4.at<double>(3,3);
inv_transform4 = transform4.inverse(); //逆序
imageSize = img_size;
color_distance = color_dis;
show_colored_cloud = show_cloud;
camera_sub1 = new message_filters::Subscriber<sensor_msgs::Image>(nh, camera_topic1,3000);
camera_sub2 = new message_filters::Subscriber<sensor_msgs::Image>(nh, camera_topic2,3000);
camera_sub3 = new message_filters::Subscriber<sensor_msgs::Image>(nh, camera_topic3,3000);
camera_sub4 = new message_filters::Subscriber<sensor_msgs::Image>(nh, camera_topic4,3000);
lidar_sub = new message_filters::Subscriber<sensor_msgs::PointCloud2>(nh, lidar_topic,10000);
sync_ = new message_filters::Synchronizer<slamSyncPolicy>(slamSyncPolicy(1000), *camera_sub1, *camera_sub2,*camera_sub3,*camera_sub4,*lidar_sub);
sync_->registerCallback(boost::bind(&RsCamFusion::callback,this, _1, _2, _3, _4,_5));
cout<<"waite_image"<<endl;
allocateMemory(); //初始化
}
//**********************************************************************************************************
//3、成员函数
void allocateMemory()
{
colored_cloud_toshow.reset(new pcl::PointCloud<PointXYZRGBI>());
input_cloud.reset(new pcl::PointCloud<pcl::PointXYZI>());
out_cloud.reset(new pcl::PointCloud<pcl::PointXYZI>());
input_cloud_ptr.reset(new pcl::PointCloud<pcl::PointXYZI>());
transformed_cloud.reset(new pcl::PointCloud<pcl::PointXYZI>());
colored_cloud.reset(new pcl::PointCloud<PointXYZRGBI>());
colored_cloud_transback.reset(new pcl::PointCloud<PointXYZRGBI>());
lidar_points.reset(new pcl::PointCloud<pcl::PointXYZI>());
}
void resetParameters(){
input_cloud_ptr->clear();
input_cloud->clear();
out_cloud->clear();
transformed_cloud->clear();
colored_cloud->clear();
colored_cloud_transback->clear();
colored_cloud_toshow->clear();
}
void callback(const sensor_msgs::ImageConstPtr input_image_msg1,
const sensor_msgs::ImageConstPtr input_image_msg2,
const sensor_msgs::ImageConstPtr input_image_msg3,
const sensor_msgs::ImageConstPtr input_image_msg4,
const sensor_msgs::PointCloud2ConstPtr input_cloud_msg
)
{
resetParameters();
cv::Mat input_image1,input_image2,input_image3,input_image4;
cv::Mat undistorted_image;
cv_bridge::CvImagePtr cv_ptr1,cv_ptr2,cv_ptr3,cv_ptr4;
std_msgs::Header image_header1 = input_image_msg1->header;
std_msgs::Header image_header2 = input_image_msg2->header;
std_msgs::Header image_header3 = input_image_msg3->header;
std_msgs::Header image_header4 = input_image_msg4->header;
std_msgs::Header cloud_header = input_cloud_msg->header;
//数据获取
//图像ROS消息转化
try
{
cv_ptr1 = cv_bridge::toCvCopy(input_image_msg1, sensor_msgs::image_encodings::BGR8);
cv_ptr2 = cv_bridge::toCvCopy(input_image_msg2, sensor_msgs::image_encodings::BGR8);
cv_ptr3 = cv_bridge::toCvCopy(input_image_msg3, sensor_msgs::image_encodings::BGR8);
cv_ptr4 = cv_bridge::toCvCopy(input_image_msg4, sensor_msgs::image_encodings::BGR8);
}
catch(cv_bridge::Exception e)
{
ROS_ERROR_STREAM("Cv_bridge Exception:"<<e.what());
return;
}
input_image1 = cv_ptr1->image;
input_image2 = cv_ptr2->image;
input_image3 = cv_ptr3->image;
input_image4 = cv_ptr4->image;
//获取点云
pcl::fromROSMsg(*input_cloud_msg, *input_cloud_ptr);//把input_cloud_msg放入input_cloud_ptr中
std::vector<int> indices;
pcl::removeNaNFromPointCloud(*input_cloud_ptr, *input_cloud_ptr, indices);//去除无效点
int m1=1;
int m2=2;
int m3=3;
int m4=4;
transformpoint(input_cloud_ptr,input_image1,m1);
//transformpoint(input_cloud_ptr,input_image2,m2);
transformpoint(input_cloud_ptr,input_image3,m3);
//transformpoint(input_cloud_ptr,input_image4,m4);
//发布色彩点云 和图像
colored_cloud_showpub = nh.advertise<sensor_msgs::PointCloud2>("colored_cloud_toshow",100);
//cout<<*colored_cloud_toshow<<endl;
publishCloudtoShow(colored_cloud_showpub, cloud_header, colored_cloud_toshow);
fused_image_pub1 = nh.advertise<sensor_msgs::Image>("image_to_show1",100);
fused_image_pub2 = nh.advertise<sensor_msgs::Image>("image_to_show2",100);
fused_image_pub3 = nh.advertise<sensor_msgs::Image>("image_to_show3",100);
fused_image_pub4 = nh.advertise<sensor_msgs::Image>("image_to_show4",100);
publishImage(fused_image_pub1, image_header1, image_to_show1);
publishImage(fused_image_pub2, image_header2, image_to_show2);
publishImage(fused_image_pub3, image_header3, image_to_show3);
publishImage(fused_image_pub4, image_header4, image_to_show4);
frame_count = frame_count + 1;
}
//发布点云图像函数
void publishImage(const ros::Publisher& image_pub, const std_msgs::Header& header, const cv::Mat image)
{
cv_bridge::CvImage output_image;
output_image.header = header;
output_image.encoding = sensor_msgs::image_encodings::TYPE_8UC3;
output_image.image = image;
image_pub.publish(output_image);
}
void publishCloudtoShow(const ros::Publisher& cloudtoshow_pub, const std_msgs::Header& header,
const pcl::PointCloud<PointXYZRGBI>::ConstPtr& cloud)
{
sensor_msgs::PointCloud2 output_msg;
pcl::toROSMsg(*cloud, output_msg);
output_msg.header = header;
cloudtoshow_pub.publish(output_msg);
}
//点云微调
void transformpoint(const pcl::PointCloud<pcl::PointXYZI>::ConstPtr& input, const cv::Mat input_image, const int m)
{
//微调点云
Eigen::Matrix4d transform;
Eigen::Matrix4d inv_transform;
if (m==1)
{
transform = transform1;
inv_transform = inv_transform1;
}
else if (m==2)
{
transform = transform2;
inv_transform = inv_transform2;
}
else if (m==3)
{
transform = transform3;
inv_transform = inv_transform3;
}
else
{
transform = transform4;
inv_transform = inv_transform4;
}
*input_cloud = *input;
// 创建矩阵对象transform_2.matrix(),初始化为4×4单位阵
Eigen::Affine3f transform_2 = Eigen::Affine3f::Identity();
// 定义在x轴上的平移,2.5m
transform_2.translation() << 0.0, 0.0, 0; // 三个数分别对应X轴、Y轴、Z轴方向上的平移
// 定义旋转矩阵,绕z轴M_PI/8
transform_2.rotate(Eigen::AngleAxisf(0, Eigen::Vector3f::UnitZ())); //同理,UnitX(),绕X轴;UnitY(),绕Y轴.
// 打印平移、旋转矩阵
//std::cout << "\n方式2: 使用Affine3f\n";
//std::cout << transform_2.matrix() << std::endl; //注意:不是transform_2
// 执行转换
// transform_1 或者 transform_2 都可以实现相同的转换
//cout<<*input_cloud<<endl;
std::cout << transform_2.matrix() << std::endl;
pcl::transformPointCloud(*input_cloud, *out_cloud, transform_2); //注意:不是transform_2.matrix()
if (input_cloud->size() == 0)
{
WARN << "input cloud is empty, please check it out!" << REND;
}
//transform lidar points from lidar coordinate to camera coordiante
//点云旋转变化放入transformed_cloud中
pcl::PointCloud<pcl::PointXYZI>::Ptr transformed_cloud(new pcl::PointCloud<pcl::PointXYZI>);//new开辟了一个新的空间在局部函数进行完后仍能调用
pcl::transformPointCloud (*out_cloud, *transformed_cloud, transform); //lidar coordinate(forward x+, left y+, up z+)
//camera coordiante(right x+, down y+, forward z+) (3D-3D)
//using the extrinsic matrix between this two coordinate system
std::vector<cv::Point3d> lidar_points;
std::vector<cv::Scalar> dis_color;
std::vector<float> intensity;
//4、只保留前面的点云,只投影到前面相机
//reserve the points in front of the camera(z>0)
for(int i=0;i<=transformed_cloud->points.size();i++)
{
if(transformed_cloud->points[i].z>0)
{
//将z正点云保存到lidar_points
lidar_points.push_back(cv::Point3d(transformed_cloud->points[i].x, transformed_cloud->points[i].y, transformed_cloud->points[i].z));
int color_order = int(transformed_cloud->points[i].z / color_distance);
if(color_order > 20)
{
color_order = 20;
}
dis_color.push_back(cv::Scalar(color[color_order][2], color[color_order][1], color[color_order][0]));
intensity.push_back(transformed_cloud->points[i].intensity);
}
}
//点云投影
if (m==1)
{
cv::projectPoints(lidar_points, rMat, tVec, intrinsic1, distcoeff1, imagePoints);
}
else if (m==2)
{
cv::projectPoints(lidar_points, rMat, tVec, intrinsic2, distcoeff2, imagePoints);
}
else if (m==3)
{
cv::projectPoints(lidar_points, rMat, tVec, intrinsic3, distcoeff3, imagePoints);
}
else
{
cv::projectPoints(lidar_points, rMat, tVec, intrinsic4, distcoeff4, imagePoints);
}
image_to_show = input_image.clone();
for(int i=0;i<imagePoints.size();i++)
{
if(imagePoints[i].x>=0 && imagePoints[i].x<640 && imagePoints[i].y>=0 && imagePoints[i].y<480)
{
cv::circle(image_to_show, imagePoints[i], 1, dis_color[i], 2, 8, 0);//画圆
if (m==1)
{
image_to_show1 = image_to_show;
}
else if (m==2)
{
image_to_show2 = image_to_show;
}
else if (m==3)
{
image_to_show3 = image_to_show;
}
else
{
image_to_show4 = image_to_show;
}
PointXYZRGBI point; //reserve the lidar points in the range of image
point.x = lidar_points[i].x; //use 3D lidar points and RGB value of the corresponding pixels
point.y = lidar_points[i].y; //to create colored point clouds
point.z = lidar_points[i].z;
point.intensity = intensity[i];
point.r = input_image.at<cv::Vec3b>(imagePoints[i].y, imagePoints[i].x)[2];
point.g = input_image.at<cv::Vec3b>(imagePoints[i].y, imagePoints[i].x)[1];
point.b = input_image.at<cv::Vec3b>(imagePoints[i].y, imagePoints[i].x)[0];
colored_cloud->points.push_back(point);
}
}
//transform colored points from camera coordinate to lidar coordinate
pcl::transformPointCloud (*colored_cloud, *colored_cloud_transback, inv_transform); //再将点云转化到三维
//cout<<*colored_cloud_transback<<endl;
if(show_colored_cloud)
{
for(int i=0;i<colored_cloud_transback->points.size();i++)
{
PointXYZRGBI point;
point.x = colored_cloud_transback->points[i].x;
point.y = colored_cloud_transback->points[i].y;
point.z = colored_cloud_transback->points[i].z;
point.intensity = colored_cloud_transback->points[i].intensity;
colored_cloud_toshow->points.push_back (point);
/*
if (int(colored_cloud_transback->points[i].r) == 128 || int(colored_cloud_transback->points[i].r) == 152
||int(colored_cloud_transback->points[i].r) == 107 || int(colored_cloud_transback->points[i].r) == 244
||int(colored_cloud_transback->points[i].r) == 70 )
{
PointXYZRGBI point;
point.x = colored_cloud_transback->points[i].x;
point.y = colored_cloud_transback->points[i].y;
point.z = colored_cloud_transback->points[i].z;
point.r = colored_cloud_transback->points[i].r;
point.g = colored_cloud_transback->points[i].g;
point.b = colored_cloud_transback->points[i].b;
point.intensity = colored_cloud_transback->points[i].intensity;
colored_cloud_toshow->points.push_back (point);
//cout<<int(point.r)<<","<<int(point.g)<<","<<int(point.b)<<endl;
}
*/
}
//cout<<*colored_cloud_toshow<<endl;
}
}
};
//*****************************************************************************************************
//
// 程序入口
//
//×××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××
int main(int argc, char** argv)
{
//1、节点初始化 及定义参数
ros::init(argc, argv, "add_color_node");
RsCamFusion RF;
ros::spin();
return 0;
} 
四、将彩色点云传入LeGO_LOAM
需要将LeGO_LOAM代码中所有的点云类型更改。参见 工程(一)Lego_Loam安装调试及运行。得到语义点云地图。
五、采用KITTI数据集跑
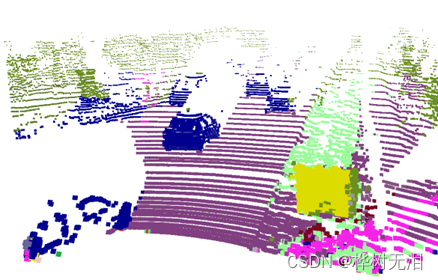
参见 工程(四)——Kitti转bag跑Lego-LOAM,因为KITTI数据集只有前视的摄像头,所以只用能够投影到前视的点云进行建图,精度有限。
KITTI与相机融合代码如下
//
// Created by cai on 2021/8/26.
//
#include<ros/ros.h>
#include<cv_bridge/cv_bridge.h>
#include<sensor_msgs/image_encodings.h>
#include<image_transport/image_transport.h>
#include <time.h>
#include<opencv2/opencv.hpp>
#include<opencv2/highgui/highgui.hpp>
#include<opencv2/imgproc/imgproc.hpp>
#include<cmath>
#include<stdio.h>
//#include "fssim_common/Cmd.h"
#include <Eigen/Core>
// 稠密矩阵的代数运算(逆,特征值等)
#include <Eigen/Dense>
#include <ros/ros.h>
#include "sensor_msgs/LaserScan.h"
#include "geometry_msgs/PoseWithCovarianceStamped.h"
#include <message_filters/subscriber.h>
#include <message_filters/synchronizer.h>
#include <message_filters/sync_policies/approximate_time.h>
#include <message_filters/time_synchronizer.h>
#include <boost/thread/thread.hpp>
#include <iostream>
#include <nav_msgs/Path.h>
#include <sensor_msgs/Imu.h>
#include <sensor_msgs/NavSatFix.h>
#include <sensor_msgs/PointCloud2.h>
#include <pcl_conversions/pcl_conversions.h>
#include <pcl/point_cloud.h>
#include <pcl/point_types.h>
#include <pcl/filters/voxel_grid.h>
#include <pcl/sample_consensus/model_types.h>
#include <pcl/sample_consensus/method_types.h>
#include <pcl/common/transforms.h>
#include <pcl_conversions/pcl_conversions.h>
#include <pcl/visualization/pcl_visualizer.h>
#include <pcl/visualization/cloud_viewer.h>
#include <tf2_ros/transform_listener.h>
#include <sensor_msgs/point_cloud_conversion.h>
using namespace Eigen;
using namespace cv;
using namespace std;
#include "colored_pointcloud/colored_pointcloud.h"
#include <ros/ros.h>
#include <sensor_msgs/PointCloud2.h>
cv::Mat P_rect_00(3,4,cv::DataType<double>::type);//3×4 projection matrix after rectification
cv::Mat R_rect_00(4,4,cv::DataType<double>::type);//3×3 rectifying rotation to make image planes co-planar
cv::Mat RT(4,4,cv::DataType<double>::type);//rotation matrix and translation vector
class RsCamFusion
{
//**********************************************************************************************************
//1、定义成员变量
private:
typedef message_filters::sync_policies::ApproximateTime<sensor_msgs::Image,sensor_msgs::PointCloud2> slamSyncPolicy;
message_filters::Synchronizer<slamSyncPolicy>* sync_;
message_filters::Subscriber<sensor_msgs::Image>* camera_sub1;
message_filters::Subscriber<sensor_msgs::PointCloud2>* lidar_sub;
pcl::PointCloud<PointXYZRGBI>::Ptr colored_cloud_toshow;
pcl::PointCloud<PointXYZRGBI>::Ptr colored_cloud;
pcl::PointCloud<PointXYZRGBI>::Ptr cloud_toshow;
/*
pcl::PointCloud<pcl::PointXYZRGB>::Ptr colored_cloud_toshow;
pcl::PointCloud<pcl::PointXYZRGB>::Ptr colored_cloud;
pcl::PointCloud<pcl::PointXYZRGB>::Ptr cloud_toshow;
*/
pcl::PointCloud<pcl::PointXYZI>::Ptr input_cloud;
pcl::PointCloud<pcl::PointXYZI>::Ptr input_cloud_ptr;
pcl::PointCloud<pcl::PointXYZI>::Ptr raw_cloud;
cv::Mat input_image;
cv::Mat image_to_show,image_to_show1;
int frame_count = 0;
static cv::Size imageSize;
static ros::Publisher pub;
//store calibration data in Opencv matrices
image_transport::Publisher depth_pub ;
sensor_msgs::ImagePtr depth_msg;
ros::NodeHandle nh;
ros::Publisher colored_cloud_showpub;
ros::Subscriber sub;
ros::Publisher fused_image_pub1;
public:
//构造函数
RsCamFusion():
nh("~"){
RT.at<double>(0,0) = 7.533745e-03;RT.at<double>(0,1) = -9.999714e-01;RT.at<double>(0,2) = -6.166020e-04;RT.at<double>(0,2) = -4.069766e-03;
RT.at<double>(1,0) = 1.480249e-02;RT.at<double>(1,1) = 7.280733e-04;RT.at<double>(1,2) = -9.998902e-01;RT.at<double>(1,3) = -7.631618e-02;
RT.at<double>(2,0) = 9.998621e-01;RT.at<double>(2,1) = 7.523790e-03;RT.at<double>(2,2) = 1.480755e-02;RT.at<double>(2,3) = -2.717806e-01;
RT.at<double>(3,0) = 0.0;RT.at<double>(3,1) = 0.0;RT.at<double>(3,2) = 0.0;RT.at<double>(3,3) = 1.0;
R_rect_00.at<double>(0,0) = 9.999239e-01;R_rect_00.at<double>(0,1) = 9.837760e-03;R_rect_00.at<double>(0,2) = -7.445048e-03;R_rect_00.at<double>(0,3) = 0.0;
R_rect_00.at<double>(1,0) = -9.869795e-03;R_rect_00.at<double>(1,1) = 9.999421e-01;R_rect_00.at<double>(1,2) = -4.278459e-03;R_rect_00.at<double>(1,3) = 0.0;
R_rect_00.at<double>(2,0) = 7.402527e-03;R_rect_00.at<double>(2,1) = 4.351614e-03;R_rect_00.at<double>(2,2) = 9.999631e-01;R_rect_00.at<double>(2,3) = 0.0;
R_rect_00.at<double>(3,0) = 0.0;R_rect_00.at<double>(3,1) = 0.0;R_rect_00.at<double>(3,2) = 0.0;R_rect_00.at<double>(3,3) = 1.0;
P_rect_00.at<double>(0,0) = 7.215377e+02;P_rect_00.at<double>(0,1) = 0.000000e+00;P_rect_00.at<double>(0,2) = 6.095593e+02;P_rect_00.at<double>(0,3) = 0.000000e+00;
P_rect_00.at<double>(1,0) = 0.000000e+00;P_rect_00.at<double>(1,1) = 7.215377e+02;P_rect_00.at<double>(1,2) = 1.728540e+02;P_rect_00.at<double>(1,3) = 0.000000e+00;
P_rect_00.at<double>(2,0) = 0.000000e+00;P_rect_00.at<double>(2,1) = 0.000000e+00;P_rect_00.at<double>(2,2) = 1.000000e+00;P_rect_00.at<double>(2,3) = 0.000000e+00;
camera_sub1 = new message_filters::Subscriber<sensor_msgs::Image>(nh, "/forward",300);
lidar_sub = new message_filters::Subscriber<sensor_msgs::PointCloud2>(nh, "/kitti/velo/pointcloud",100);
sync_ = new message_filters::Synchronizer<slamSyncPolicy>(slamSyncPolicy(100), *camera_sub1,*lidar_sub);
sync_->registerCallback(boost::bind(&RsCamFusion::callback,this, _1, _2));
cout<<"waite_image"<<endl;
allocateMemory(); //初始化
}
void allocateMemory()
{
raw_cloud.reset(new pcl::PointCloud<pcl::PointXYZI>());
colored_cloud_toshow.reset(new pcl::PointCloud<PointXYZRGBI>());
colored_cloud.reset(new pcl::PointCloud<PointXYZRGBI>());
cloud_toshow.reset(new pcl::PointCloud<PointXYZRGBI>());
input_cloud.reset(new pcl::PointCloud<pcl::PointXYZI>());
input_cloud_ptr.reset(new pcl::PointCloud<pcl::PointXYZI>());
}
void resetParameters(){
raw_cloud->clear();
input_cloud_ptr->clear();
input_cloud->clear();
colored_cloud_toshow->clear();
colored_cloud->clear();
cloud_toshow->clear();
}
void callback(const sensor_msgs::ImageConstPtr input_image_msg1,
const sensor_msgs::PointCloud2ConstPtr input_cloud_msg)
{
resetParameters();
cv::Mat input_image1;
cv_bridge::CvImagePtr cv_ptr1;
std_msgs::Header image_header1 = input_image_msg1->header;
std_msgs::Header cloud_header = input_cloud_msg->header;
//数据获取
//图像ROS消息转化
cv_ptr1 = cv_bridge::toCvCopy(input_image_msg1,sensor_msgs::image_encodings::BGR8);
input_image1 = cv_ptr1->image;
//获取点云
pcl::fromROSMsg(*input_cloud_msg, *input_cloud_ptr);//把input_cloud_msg放
std::vector<int> indices;
pcl::removeNaNFromPointCloud(*input_cloud_ptr, *input_cloud_ptr, indices);//去除无效点
transformpoint(input_cloud_ptr,input_image1,P_rect_00,R_rect_00,RT);
cout<<"start"<<endl;
colored_cloud_showpub = nh.advertise<sensor_msgs::PointCloud2>("colored_cloud_toshow",10);
publishCloudtoShow(colored_cloud_showpub, cloud_header, colored_cloud_toshow);
fused_image_pub1 = nh.advertise<sensor_msgs::Image>("image_to_show",10);
publishImage(fused_image_pub1, image_header1, image_to_show1);
frame_count = frame_count + 1;
}
//××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××
void transformpoint(const pcl::PointCloud<pcl::PointXYZI>::ConstPtr& input_cloud, const cv::Mat input_image, cv::Mat &P_rect_00,cv::Mat &R_rect_00,cv::Mat &RT)
{
cv::Mat X(4,1,cv::DataType<double>::type);
cv::Mat Y(4,1,cv::DataType<double>::type);
cv::Point pt;
std::vector<cv::Point3f> rawPoints;
*raw_cloud = *input_cloud;
image_to_show = input_image.clone();
for(int i=0;i<raw_cloud->size();i++) {
// convert each 3D point into homogeneous coordinates and store it in a 4D variable X
X.at<double>(0, 0) = raw_cloud->points[i].x;
X.at<double>(1, 0) = raw_cloud->points[i].y;
X.at<double>(2, 0) = raw_cloud->points[i].z;
X.at<double>(3, 0) = 1;
//apply the projection equation to map X onto the image plane of the camera. Store the result in Y
//计算矩阵
Y=P_rect_00*R_rect_00*RT*X;
pt.x=Y.at<double>(0, 0) / Y.at<double>(2, 0);
pt.y=Y.at<double>(1, 0) / Y.at<double>(2, 0);
// transform Y back into Euclidean coordinates and store the result in the variable pt
float d = Y.at<double>(2, 0)*1000.0;
float val = raw_cloud->points[i].x;
float maxVal = 20.0;
int red = min(255, (int) (255 * abs((val - maxVal) / maxVal)));
int green = min(255, (int) (255 * (1 - abs((val - maxVal) / maxVal))));
if(pt.x<1240 &&pt.x>0 &&pt.y<375 &&pt.y>0 &&d>0)
{
/*
if (int(input_image.at<cv::Vec3b>(pt.y, pt.x)[2]) == 128 || int(input_image.at<cv::Vec3b>(pt.y, pt.x)[2]) == 152
||int(input_image.at<cv::Vec3b>(pt.y, pt.x)[2]) == 107 || int(input_image.at<cv::Vec3b>(pt.y, pt.x)[2]) == 244
||int(input_image.at<cv::Vec3b>(pt.y, pt.x)[2]) == 70 )
{
*/
cv::circle(image_to_show, pt, 1, cv::Scalar(0, green, red), cv::FILLED);
image_to_show1 = image_to_show;
PointXYZRGBI point;
point.x = raw_cloud->points[i].x;
point.y = raw_cloud->points[i].y; //to create colored point clouds
point.z = raw_cloud->points[i].z;
point.intensity = raw_cloud->points[i].intensity;
point.g = input_image.at<cv::Vec3b>(pt.y, pt.x)[1];
point.b = input_image.at<cv::Vec3b>(pt.y, pt.x)[0];
point.r = input_image.at<cv::Vec3b>(pt.y, pt.x)[2];
colored_cloud->points.push_back(point);
}
/*
else
{
pcl::PointXYZRGB point;
point.x = raw_cloud->points[i].x;
point.y = raw_cloud->points[i].y; //to create colored point clouds
point.z = raw_cloud->points[i].z;
//point.intensity = raw_cloud->points[i].intensity;
point.g = 0;
point.b = 0;
point.r = 0;
cloud_toshow->points.push_back(point);
}
*/
}
*colored_cloud_toshow=*colored_cloud+*cloud_toshow;
}
void publishCloudtoShow(const ros::Publisher& cloudtoshow_pub, const std_msgs::Header& header,
const pcl::PointCloud<PointXYZRGBI>::ConstPtr& cloud)
{
sensor_msgs::PointCloud2 output_msg;
pcl::toROSMsg(*cloud, output_msg);
output_msg.header = header;
cloudtoshow_pub.publish(output_msg);
}
void publishImage(const ros::Publisher& image_pub, const std_msgs::Header& header, const cv::Mat image)
{
cv_bridge::CvImage output_image;
output_image.header = header;
output_image.encoding = sensor_msgs::image_encodings::TYPE_8UC3;
output_image.image = image;
image_pub.publish(output_image);
}
};
//*****************************************************************************************************
//
// 程序入口
//
//×××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××××
int main(int argc, char** argv)
{
//1、节点初始化 及定义参数
ros::init(argc, argv, "kitti3D2");
RsCamFusion RF;
ros::spin();
return 0;
}
六、效果


有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐

 2
2 0
0- 0



 已为社区贡献25条内容
已为社区贡献25条内容

所有评论(0)