2D激光SLAM-基于PL-ICP的激光雷达里程计
原文链接:从零开始搭二维激光SLAM — 基于PL-ICP的激光雷达里程计如何跑通自己的雷达数据?需要调整哪些参数?1、录制自己的数据包#终端1roscore#终端2rosbag paly --clock XXX.bag#终端3 (/scan /odom是根据自己雷达的topic名修改的)rosbag record /scan /odom2、修改源码plicp_odometry.cc修改成自己雷达
·
原文链接:从零开始搭二维激光SLAM — 基于PL-ICP的激光雷达里程计
如何跑通自己的雷达数据?需要调整哪些参数?
1、录制自己的数据包
#终端1
roscore
#终端2
rosbag paly --clock XXX.bag
#终端3 (/scan /odom是根据自己雷达的topic名修改的)
rosbag record /scan /odom
2、修改源码plicp_odometry.cc
修改成自己雷达数据的topic名
3、修改plicp_odometry.launch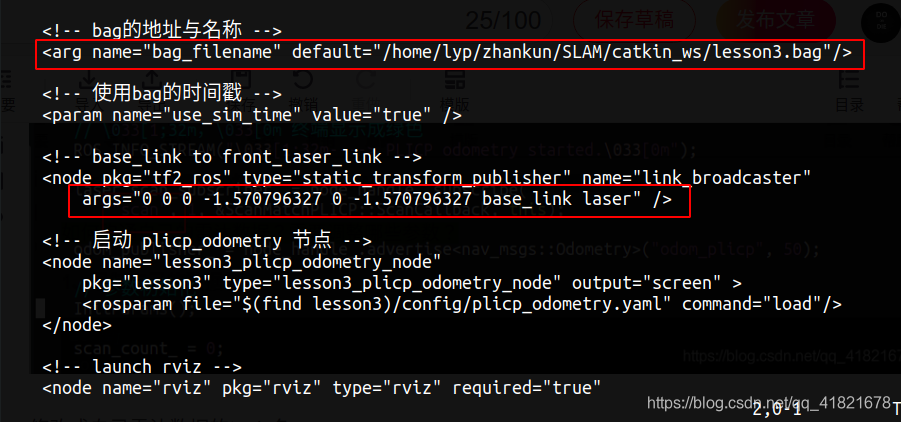
bag修改成自己的bag路径
tf_ros的args根据自己雷达和机器人的位置修改。可以查找urdf文件。后面的base_link和laser也要修改成自己的话题名。
4、修改成自己的topic名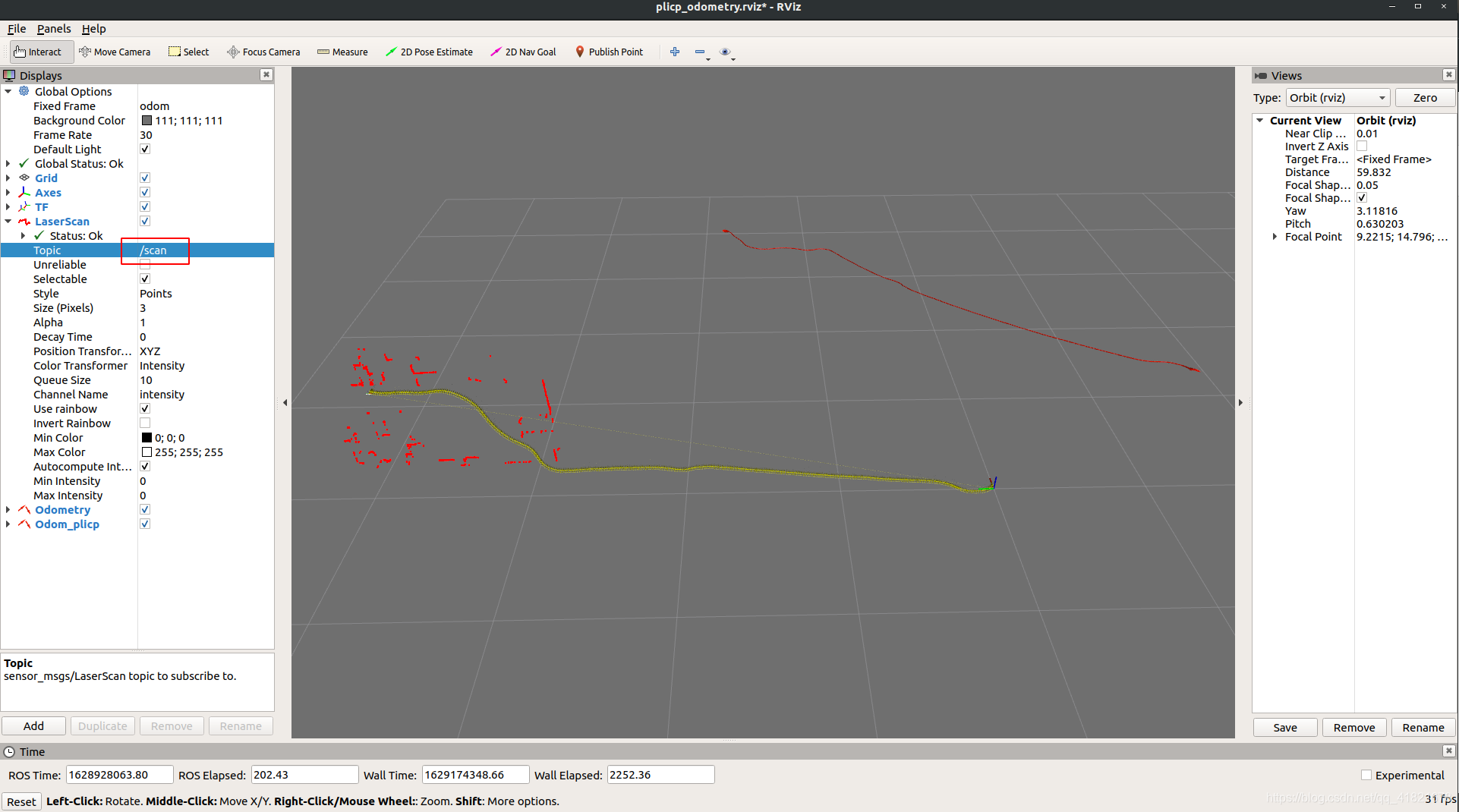

有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐

 2
2 0
0- 0



 已为社区贡献6条内容
已为社区贡献6条内容

所有评论(0)