机器人学导论(第三章)
源自:机器人学导论(原书第4版) by John J. Craig贠超 王伟
1.运动学or动力学
运动学:研究机械臂的位置,速度,加速度及位置变量的所有高阶导数,而不考虑产生运动所施加的力
动力学:机械臂运动所施加的力与力矩之间的关系
2.连杆的描述
- 低副(6种)
连接相邻两个刚体的运动副称为低副:转动~,移动~,圆柱~,平面~,螺旋~,球面~。
在机械臂中,从固定基座开始编号为0,末端执行器编号为n
结构设计时,需要考虑的连杆特性:材料类型,强度刚度,关节轴承及安装位置,重量,转动惯量等。(在研究位置关系时,可把连杆看作刚体)
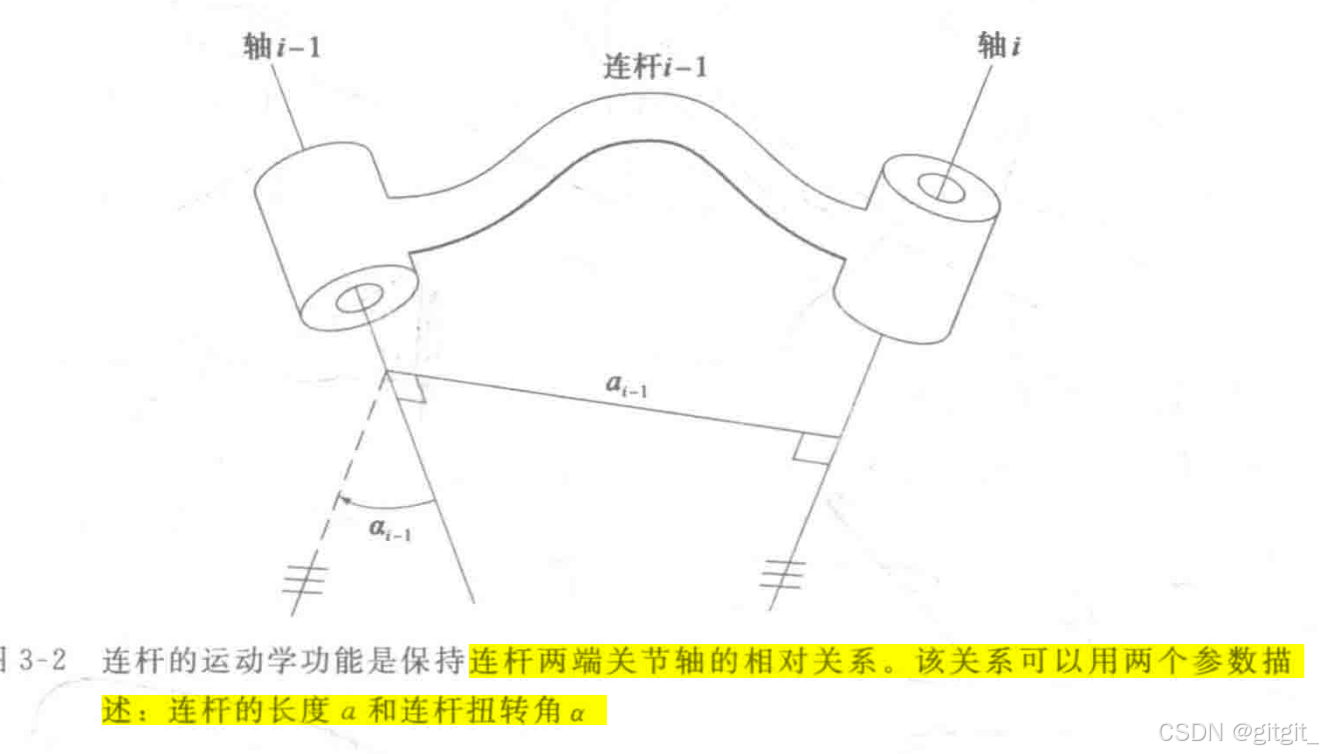
- 连杆两端关节轴的相对关系(连杆长度/连杆扭转角)
连杆长度:两轴的距离(公垂线的长度)
连杆扭转角:作与公垂线垂直的平面,将两根轴投影至该平面,按照右手定则从轴i-1到i规定正负及数值
(正负的规定)连杆扭转角可以是正角也可以是负角,具体取决于扭转的方向。按照右手法则,如果连杆 i−1的 Z轴 通过正方向(逆时针)绕其 X轴 旋转,连杆 i的 Z轴 就会与之重合,这时定义为正的连杆扭转角。
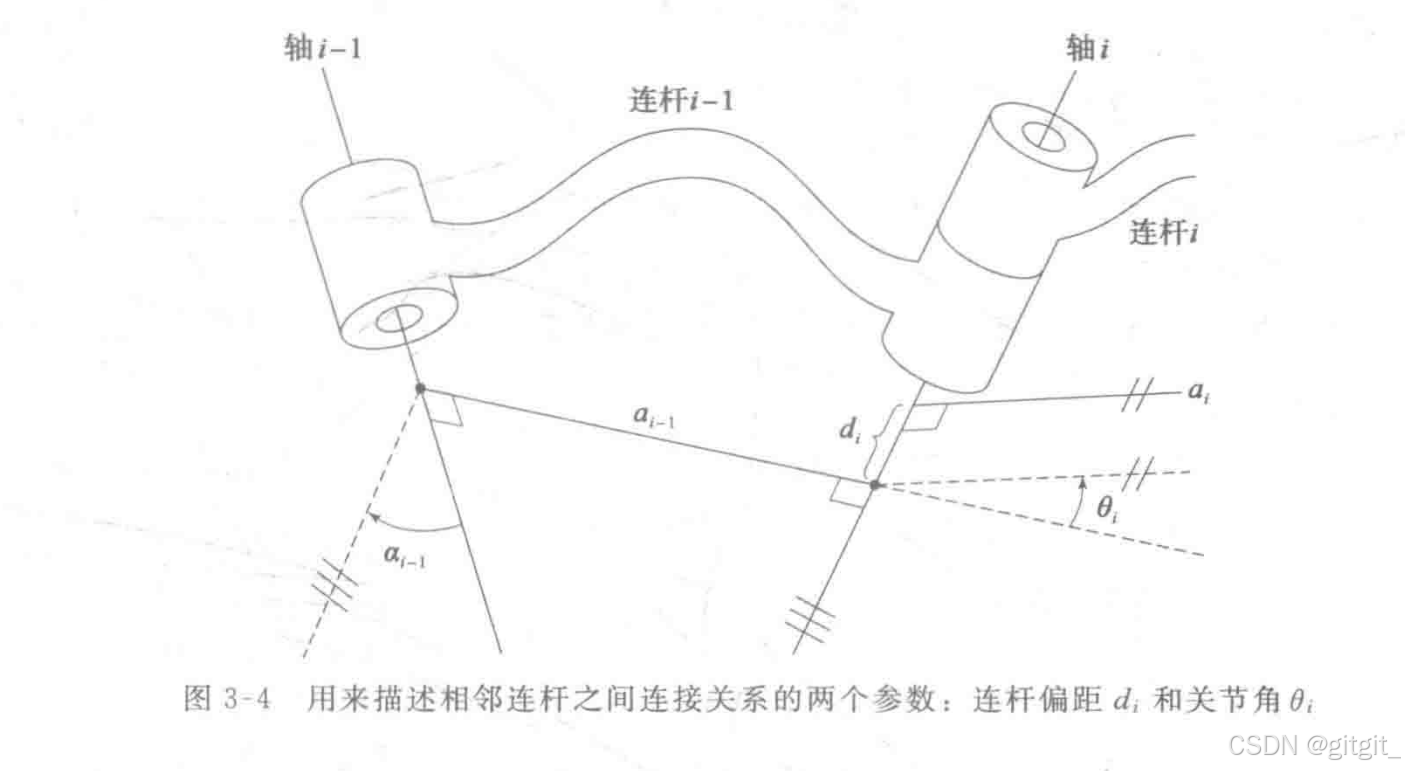
- 连杆连接的描述(连杆偏距/关节角)
连杆偏距:相邻连杆的公垂线与公共轴交点的距离
关节角:两相邻连杆绕公共轴线旋转的夹角
(PS)在D-H表示法中,每个连杆由四个参数描述,分别是:
- 连杆长度 ai:沿着连杆 i−1的 X轴,Zi轴到Zi轴的距离。
- 连杆扭转角αi :沿着连杆 i−1的 X轴,Zi轴到Zi轴的扭转角。
- 关节偏距 di:沿着关节 i的 Z轴,Xi-1轴移动到Xi轴的距离,通常用于表示滑动关节。
- 关节角度 θi:沿着关节 i的 Z轴 ,Xi-1轴到Xi轴旋转角度,通常用于旋转关节。
对于一个6关节转动机器人,只需18个参数即可完全描述该机器人的运动学参数(18个参数可分为6组【除关节角的3个参数】)
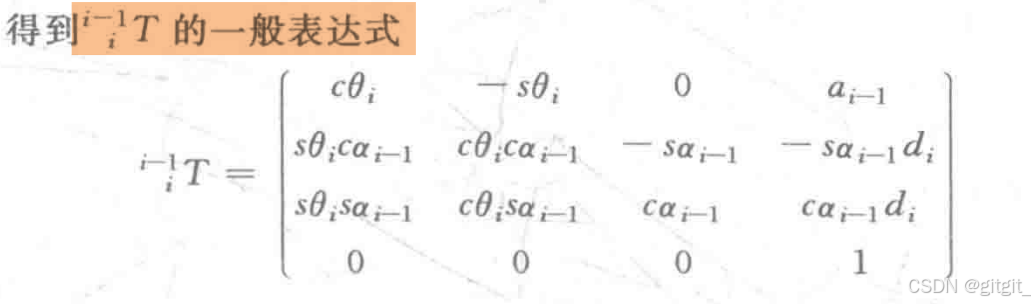
相邻两个关节转换矩阵T的一般形式:
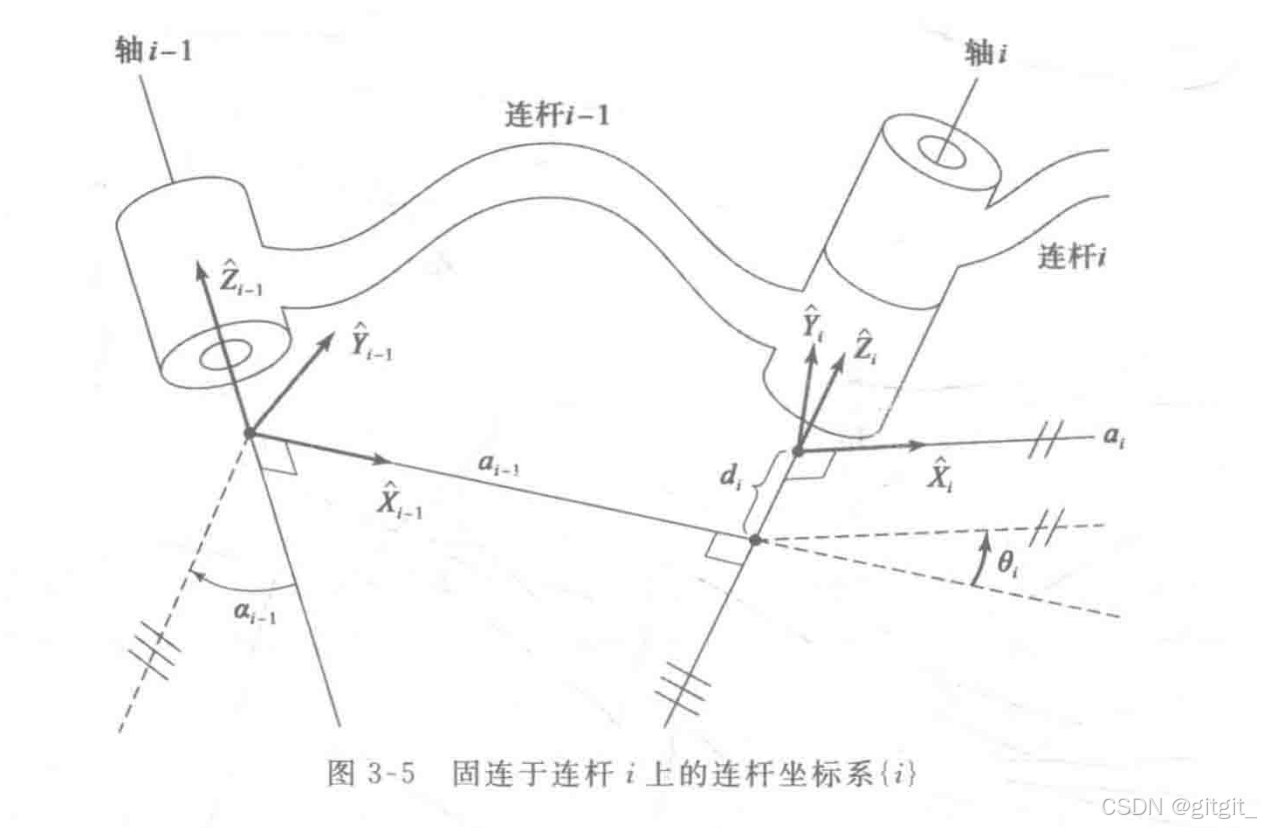
3.连杆坐标系的定义
- 连杆中间的固连坐标系定义(基于轴i)
原点:公垂线在轴i的交点
z轴:与关节轴i重合
x轴:沿公垂线ai从轴i指向轴i+1
- 机器人基座(坐标系0)的定义
为了使问题简化,使坐标系0与坐标系1建立关系如下:z轴:沿关节1方向;若连杆长度为0时,规定坐标系0等于坐标系1。
- 末端执行器(坐标系N)定义
设定关节角N为0(此时轴n-1与轴n的x轴重合),此时选取原点位置,使关节偏距为0。
- 建立坐标系步骤
1.找出各关节轴,并标出各轴的延长线
2.找出相邻两轴公垂线与轴延长线交点,或相邻两轴延长线交点;该两项作为坐标系原点。
3.规定Z轴指向(一般竖直向上),规定X轴指向(不相交:一般沿公垂线ai从轴i指向轴i+1,相交时:x轴垂直于两轴延长线所在平面)
4.根据右手定则规定Y轴指向。
5.坐标系0与坐标系n参考上面定义法。
4.机械臂位姿的3种表示方法
关节向量/空间:关节向量 是一个表示机器人关节状态的向量,它描述了每个关节的位置(旋转角度或线性位移),用来定义机器人在某一时刻的姿态。
所有关节向量组成的空间为关节空间
笛卡尔空间:位姿通过空间中相互正交的轴测量确定(参考第二章)
(PS)关节空间 vs. 任务(笛卡尔)空间:关节空间描述的是每个关节的角度或位置,而任务空间(Task Space, 也叫工作空间)则是机器人末端执行器(例如机械手或工具)的空间位置和姿态。机器人学中常常要解决从关节空间到任务空间(正运动学)或从任务空间到关节空间(逆运动学)的转换问题。
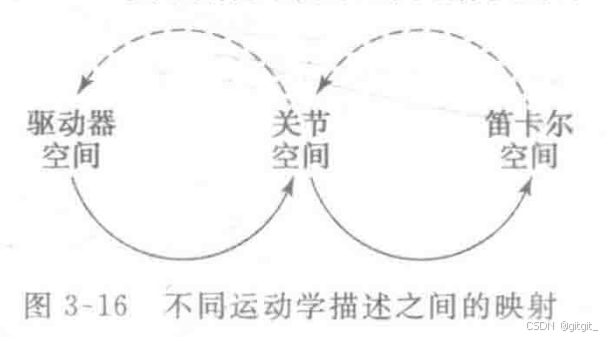
驱动空间:机械臂位置传感器通常安装在驱动器中,因此进行控制器运算时需要将关节向量表示成一组驱动器变量方程(驱动向量)
关节驱动器的连接关系有很多种方案,需要根据构型进行模型的建立。
- 3种表示方法的映射关系:
5.实例:以PUMA 560为例建立运动学方程
- PUMA 560构型及坐标系建立(6R型机械臂)
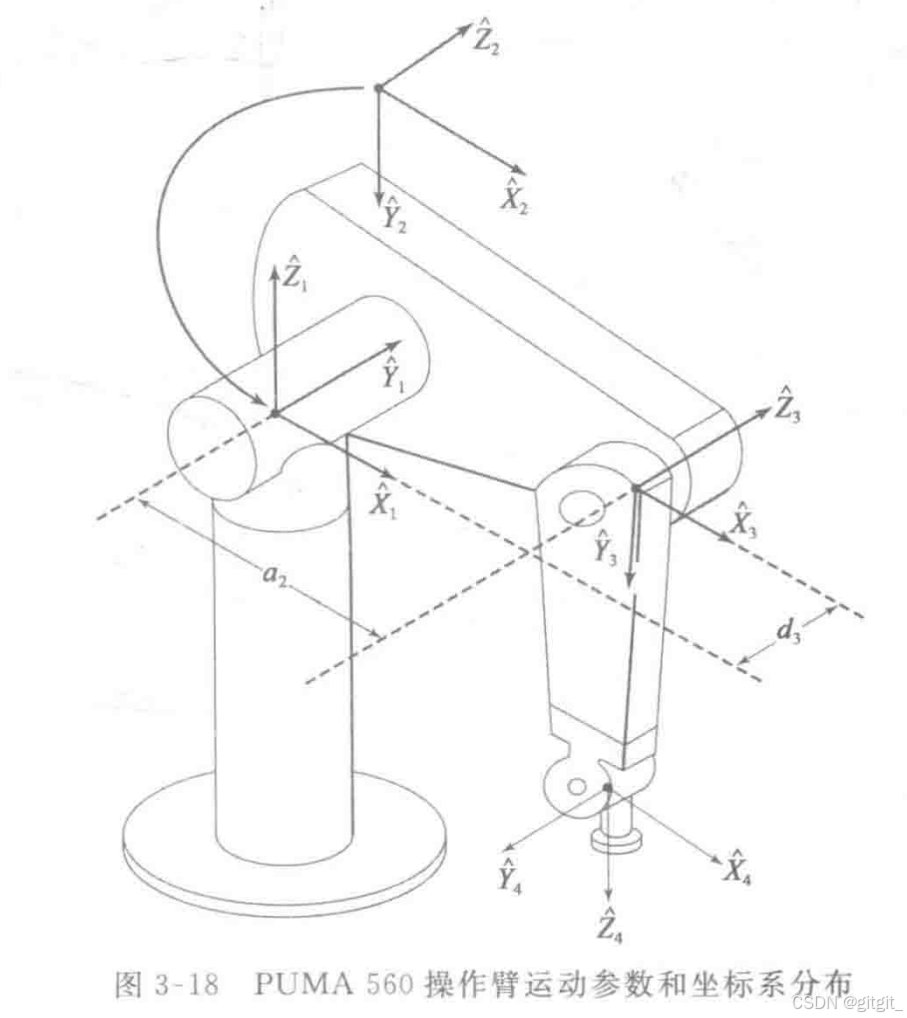
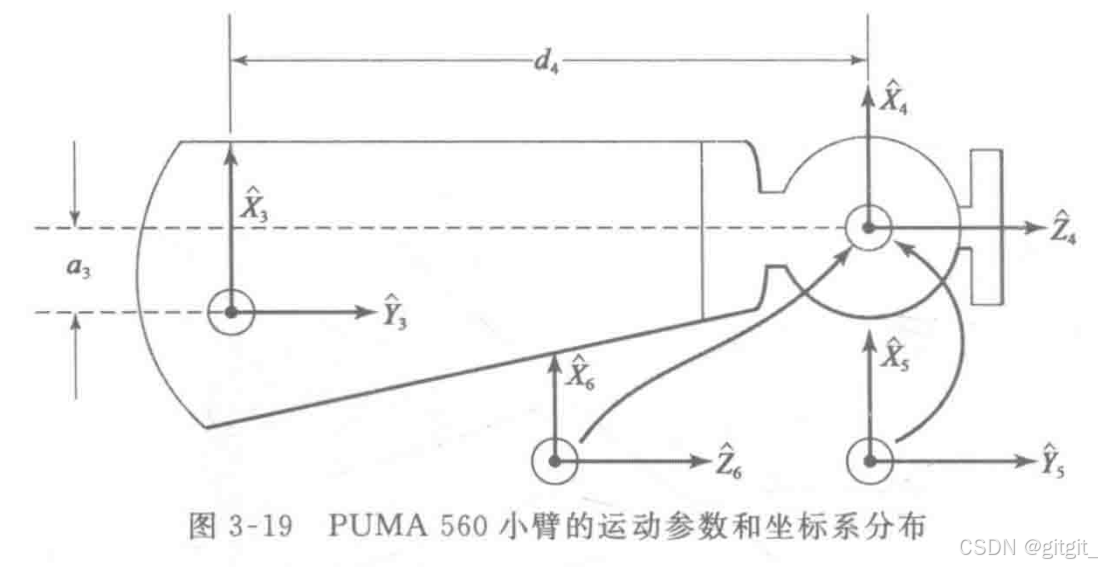
- 机构简图及DH表建立
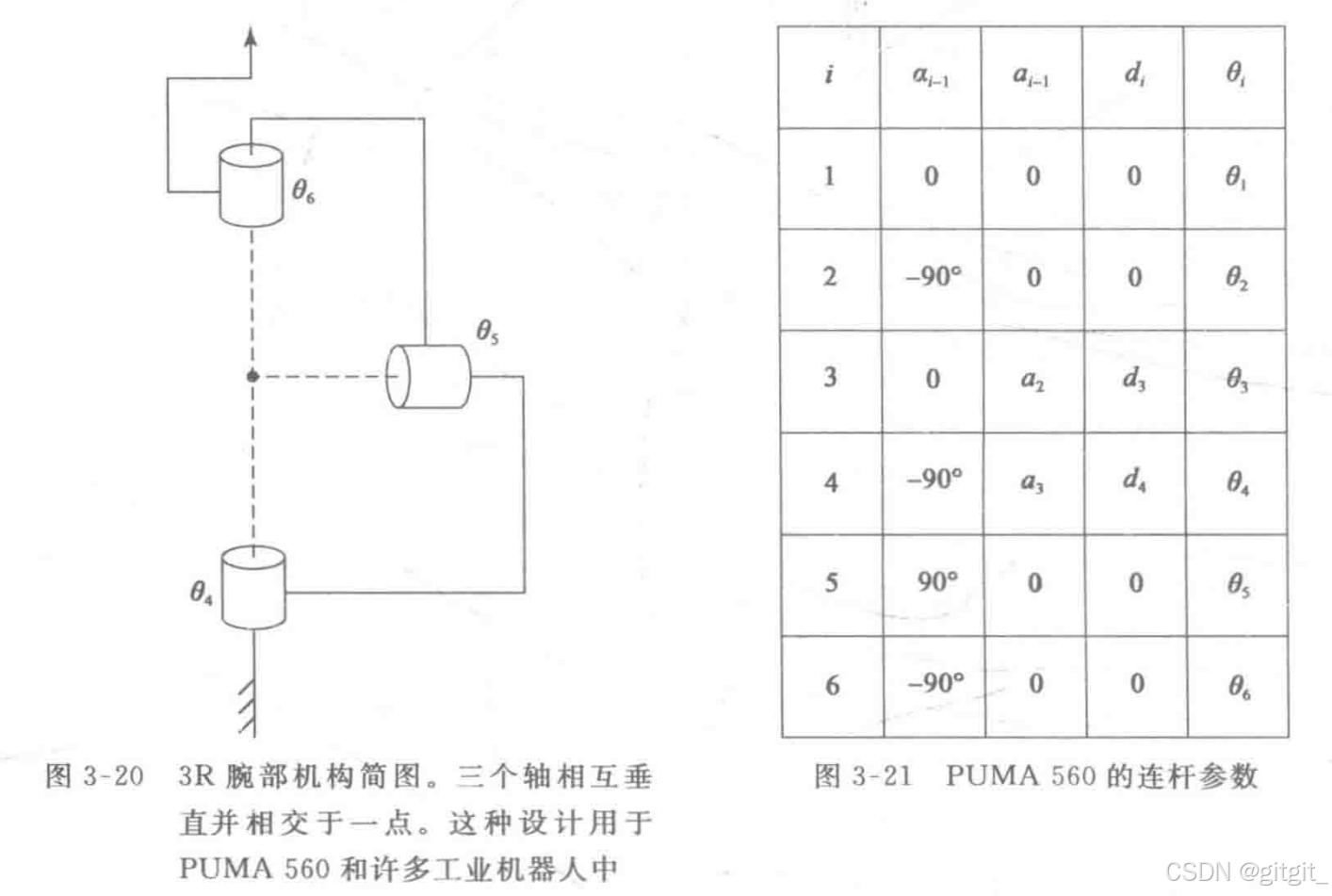
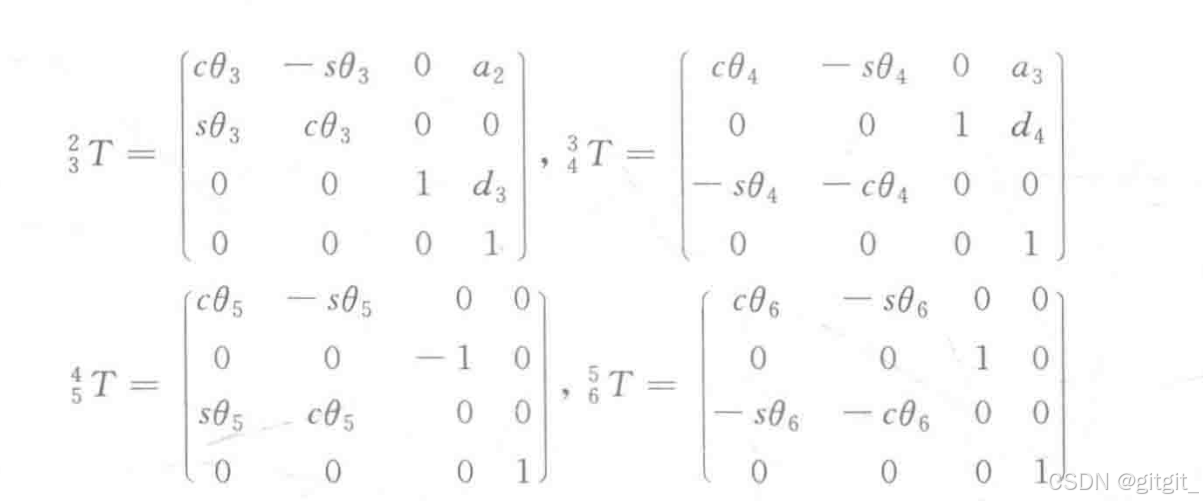
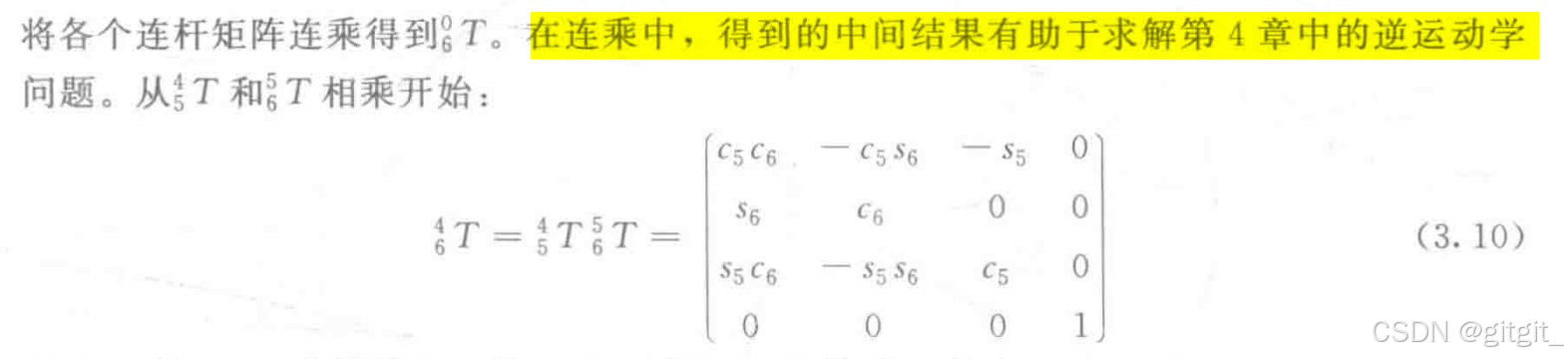
- 根据DH表参数,及转换矩阵的一般形式,可写出机械臂转换矩阵06T及关系式(坐标系0到坐标系6的转换关系)
6.坐标系标准命名及分类
- 基坐标系{B}
位于机械臂的基座上,是赋予坐标系{0}的另一个名称
- 固定坐标系{S}
一般位于工作台的一个角上;一般根据基坐标系{B}确定,即BST(B到S的转换矩阵)。
- 腕部坐标系{W}
位于机械臂的末端连杆(区别于末端执行器),根据基坐标系{B}确定。
- 工具坐标系{T}
位于机械臂的末端执行器(若无执行器,则附于机械臂的指尖)。
- 目标坐标系{G}
是对机械臂移动工具所需到达的位置描述,指机械臂运动结束时,工具坐标系{T}应与目标坐标系{G}重合,目标坐标系通常根据固定坐标系确定。
定位函数:

有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐

 27
27 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)