登录社区云,与社区用户共同成长
邀请您加入社区
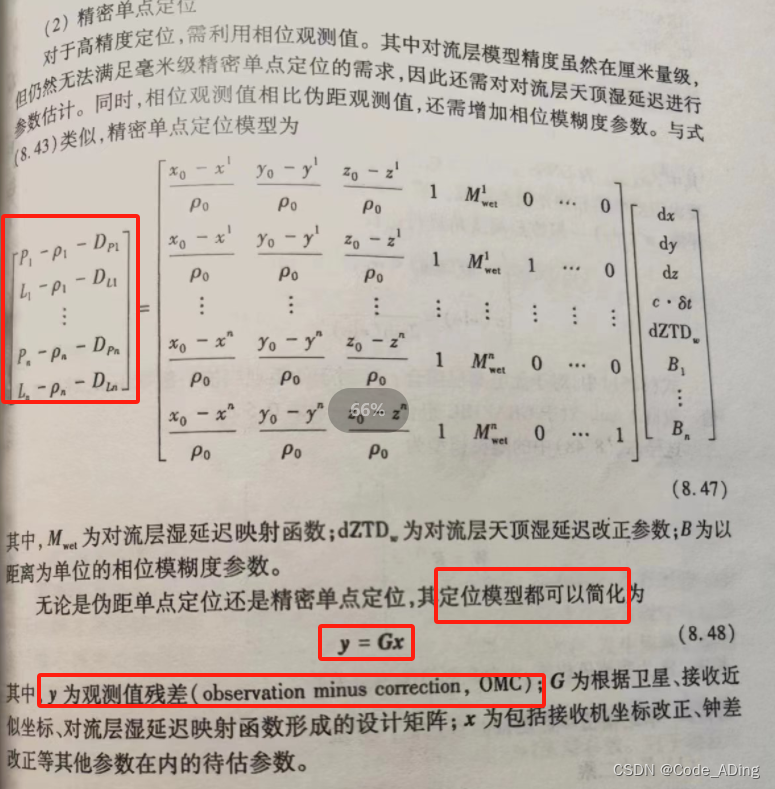
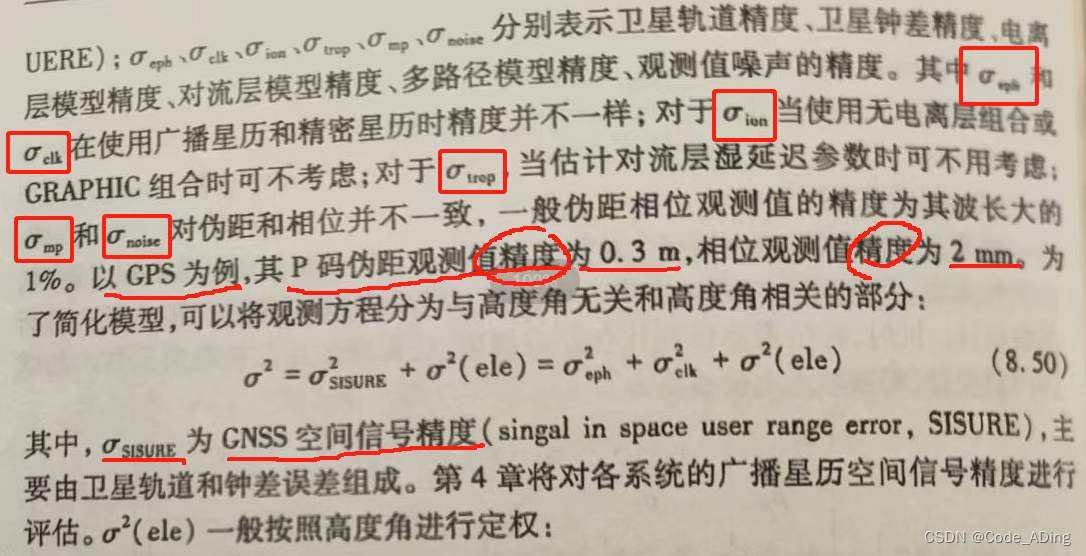
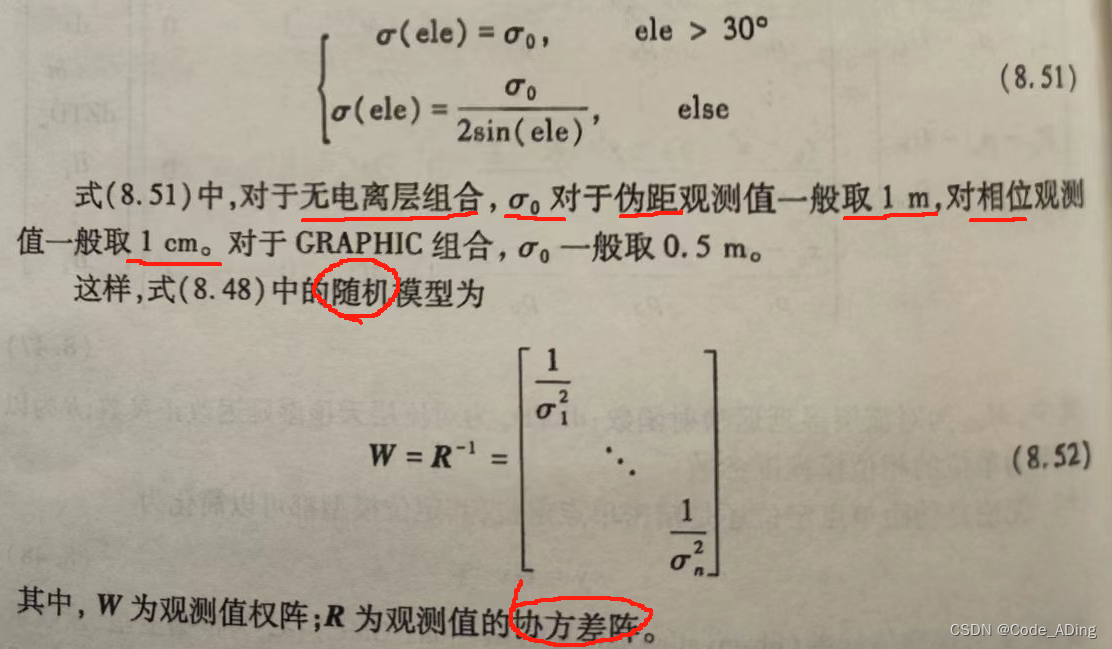
为了简化模型,上述将观测方程分为与高度角无关和高度角相关的部分。
伪距测量(伪距观测值)中误差就是上述说明的观测方差噪声,也是用户等效距离误差,是各种误差源引起的误差之和。
有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐
别让 Agent 重读 PDF:文档解析要交付可缓存资产
先出原型后合作,企业 AI 定制到底该怎么谈
最后他选了一家愿意先出原型的供应商,用一周时间做了一个可交互的原型,他看完原型才签的正式合同。一个团队的真实水平,看他们做原型的速度、对业务的理解深度、原型的完成度,就能判断个七八分。方案是用文字描述的,文字天然有歧义,供应商理解的和企业想要的,往往不是同一件事。正式合同的开发范围,应该基于已验证的原型,而不是方案文档里那些没验证过的功能。先出原型,不是供应商免费给你做一个小系统,而是在正式合同之
BBWEYY 线上获客转化解决方案:AI搜索时代企业怎么获客,BBWEYY GEO实操方法分享,含零代码SAAS、AI编程、源码定制交付
GEO的核心是让品牌信息更准确、内容更专业、信源更可信、效果更可观察。BBWEYY将建站、SEO、GEO与线索承接结合,为中小企业提供了一条可分阶段执行的AI获客路径。
扫一扫分享内容
为遵守国家网络实名制规定,未绑定将限制内容发布与互动
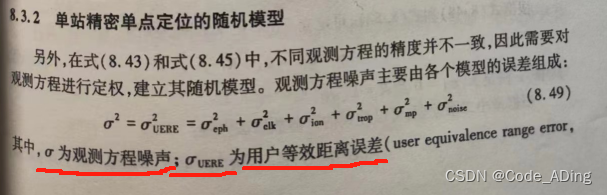
 ,也是用户等效距离误差,是各种误差源引起的误差之和。
,也是用户等效距离误差,是各种误差源引起的误差之和。






 已为社区贡献7条内容
已为社区贡献7条内容

所有评论(0)