概率机器人:速度运动模型
对概率机器人第五章机器人运动中5.1~5.3内容进行梳理,主要针对第三节内容,阐述了机器人速度运动模型的建立、算法推导、效果展示
机器人运动
概率机器人学将运动方程推广:由控制噪声或者未建模的外源性影响,控制输出是不确定的。
基础概念
运动学构型
运动学(Kinematics):描述控制行为对机器人构型产生影响的微积分。
- 位姿:能够表示机器人位置和航向的物理量
- 平面环境下通常限定为三维向量:[XYθ]T\begin{bmatrix}X&Y&\theta\end{bmatrix}^T[XYθ]T
- 航向:也称方位,用于表示机器人的朝向。
- 位置:除航向外的部分,称为位置。
- 位姿和环境中对象的位置构成了机器人-环境系统的运动学状态xtx_txt
概率运动学
概率运动学模型在移动机器人中起到状态变换模型的作用,即p(xt∣ut,xt−1)p(x_t | u_t,x_{t-1})p(xt∣ut,xt−1)。
表示在控制utu_tut作用下,前一刻机器人位姿xt−1x_{t-1}xt−1在当前时刻得到机器人位姿xtx_txt的概率。为对xt−1x_{t-1}xt−1施加控制utu_tut后,机器人取得的运动学状态的后验分布。实际控制中,utu_tut有时由机器人里程计提供。
速度运动模型
速度运动模型(Velocity Motion Model)认为可通过一个旋转速度和一个平移速度来控制机器人。差分驱动、阿克曼驱动、同步驱动通常使用该方案进行控制。
速度运动模型被用于概率运动规划,用vtv_tvt表示t时刻机器人的平移速度(Translational Velocity),用ωt\omega_tωt表示旋转速度(Rotational Velocity),有:
ut=[vtωt] u_t=\begin{bmatrix}v_t\\\omega_t\end{bmatrix} ut=[vtωt]
规定,机器人逆时针旋转为旋转正方向(ωt>0\omega_t>0ωt>0),机器人前向运动为平移正方向(vt>0v_t>0vt>0)。
模型建立
理想模型
首先,考虑无噪声的理想情况并做出如下假定:
- 时刻t的控制量ut=[vtωt]Tu_t=\begin{bmatrix}v_t&\omega_t\end{bmatrix}^Tut=[vtωt]T
- 机器人初始位姿:xt−1=[XYθ]Tx_{t-1}=\begin{bmatrix}X&Y&\theta\end{bmatrix}^Txt−1=[XYθ]T
- 在时间间隔Δt\Delta tΔt间,机器人速度恒定不变。也即机器人的控制量不变
- 运动Δt\Delta tΔt时间后,机器人的位姿:xt=[X′Y′θ′]Tx_t=\begin{bmatrix}X^{'}&Y^{'}&\theta^{'}\end{bmatrix}^Txt=[X′Y′θ′]T
则在世界坐标系XOYXOYXOY中,机器人作半径为rrr的圆弧运动,圆弧的中心点为CCC。过机器人中心作其运动方向的切线,交坐标系得航向角θ\thetaθ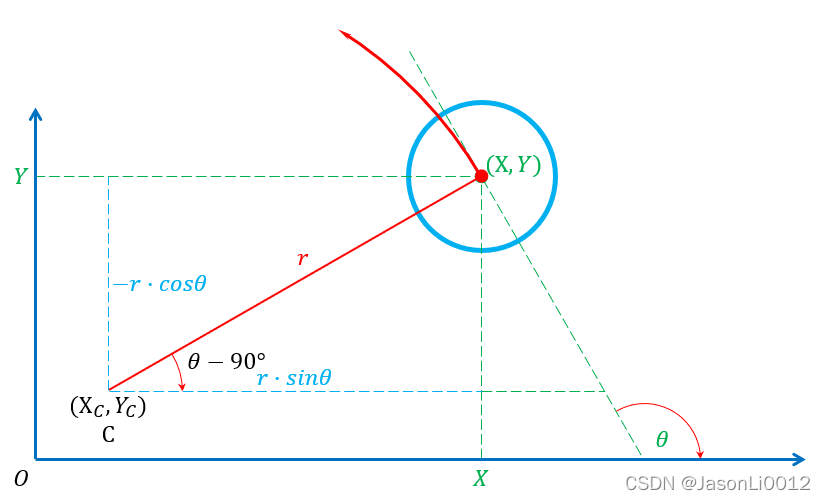
机器人平移速度与旋转速度间存在等式:
vt=ωt⋅rr=vtωt \begin{aligned} v_t&=\omega_t\cdot r\\ r&=\frac{v_t}{\omega_t} \end{aligned} vtr=ωt⋅r=ωtvt
过运动圆弧中心CCC做坐标轴平行线,可由三角函数得:
XC=X−r⋅cos(θ−90°)=X−r⋅sinθYC=Y−r⋅sin(θ−90°)=Y−r⋅cosθ X_C=X-r\cdot\cos(\theta-90\degree)=X-r\cdot\sin\theta\\ Y_C=Y-r\cdot\sin(\theta-90\degree)=Y-r\cdot\cos\theta XC=X−r⋅cos(θ−90°)=X−r⋅sinθYC=Y−r⋅sin(θ−90°)=Y−r⋅cosθ
将转弯半径带入简化等式:
{XC=X−vtωt⋅sinθYC=Y−vtωt⋅cosθ \begin{cases} X_C&=&X-\frac{v_t}{\omega_t}\cdot\sin\theta\\ Y_C&=&Y-\frac{v_t}{\omega_t}\cdot\cos\theta \end{cases} {XCYC==X−ωtvt⋅sinθY−ωtvt⋅cosθ
如图所示,机器人运动Δt\Delta tΔt时间后,沿着运动方向前进vtΔtv_t\Delta tvtΔt,并导致其航向旋转了ωtΔt\omega_t\Delta tωtΔt。
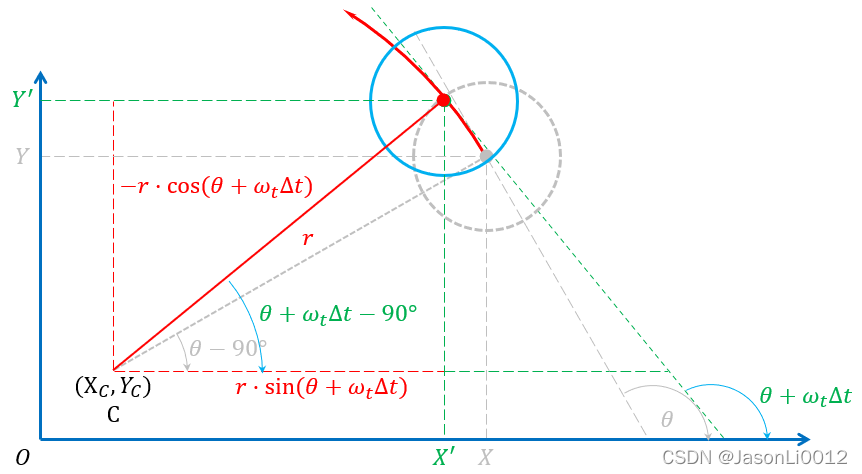
此时,圆弧中心坐标不变,在此基础上采用三角函数,计算得到当前时刻的位姿:
[X′Y′θ′]=[X+vtωtsin(θ+ωtΔt)Y+vtωtcos(θ+ωtΔt)θ+ωΔt][X′Y′θ′]=[XYθ]+[−vtωtsinθ+vtωtsin(θ+ωtΔt)vtωtcosθ−vtωtcos(θ+ωtΔt)ωtΔt] \begin{aligned} \begin{bmatrix}X^{'}\\Y^{'}\\\theta^{'}\\\end{bmatrix}&=& \begin{bmatrix} X+\frac{v_t}{\omega_t}\sin(\theta+\omega_t\Delta t)\\ Y+\frac{v_t}{\omega_t}\cos(\theta+\omega_t\Delta t)\\ \theta+\omega\Delta t\end{bmatrix}\\ \begin{bmatrix}X^{'}\\Y^{'}\\\theta^{'}\\\end{bmatrix}&=& \begin{bmatrix}X\\Y\\\theta\\\end{bmatrix}+\begin{bmatrix} -\frac{v_t}{\omega_t}\sin\theta+\frac{v_t}{\omega_t}\sin(\theta+\omega_t\Delta t)\\ \frac{v_t}{\omega_t}\cos\theta-\frac{v_t}{\omega_t}\cos(\theta+\omega_t\Delta t)\\ \omega_t\Delta t\end{bmatrix} \end{aligned} ⎣⎡X′Y′θ′⎦⎤⎣⎡X′Y′θ′⎦⎤==⎣⎡X+ωtvtsin(θ+ωtΔt)Y+ωtvtcos(θ+ωtΔt)θ+ωΔt⎦⎤⎣⎡XYθ⎦⎤+⎣⎡−ωtvtsinθ+ωtvtsin(θ+ωtΔt)ωtvtcosθ−ωtvtcos(θ+ωtΔt)ωtΔt⎦⎤
噪声模型
实际运动中,机器人将受到噪声影响。实际运行速度与期望速度存在一定的偏差。对控制量加入噪声:
[v^tω^t]=[vtωt]+[εα1vt2+α2ωt2εα3vt2+α4ωt2] \begin{bmatrix}\hat v_t\\\hat\omega_t\end{bmatrix}=\begin{bmatrix} v_t\\\omega_t\end{bmatrix}+\begin{bmatrix}\varepsilon_{\alpha_1v_t^2+\alpha_2\omega_t^2}\\\varepsilon_{\alpha_3v_t^2+\alpha_4\omega_t^2}\end{bmatrix} [v^tω^t]=[vtωt]+[εα1vt2+α2ωt2εα3vt2+α4ωt2]
式中,噪声εb2\varepsilon_{b^2}εb2表示均值为0,方差为b2b^2b2的误差参量,参数α1\alpha_1α1~α4\alpha_4α4表示机器人里程计的误差参数,用于确定机器人的精确度。机器人越不精确,参数越大。
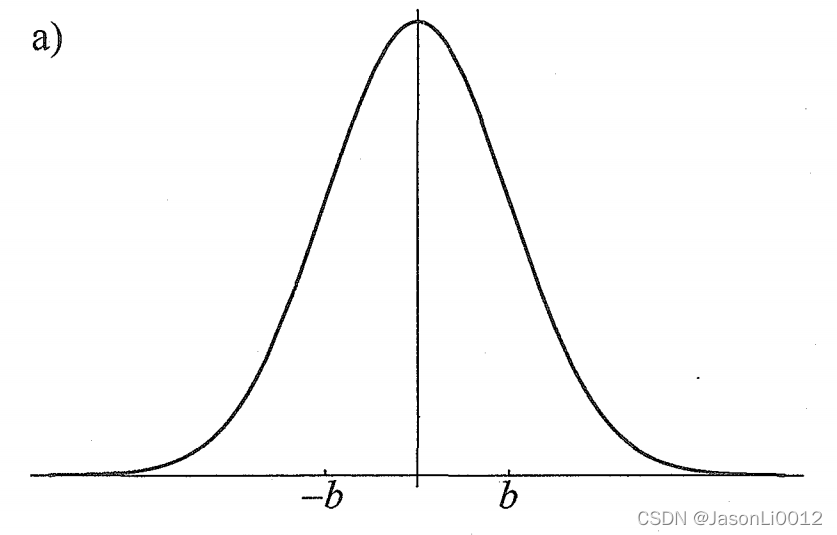
噪声可用正态分布进行描述:
εb2(x)=12πb2exp(−12x2b2) \varepsilon_{b^2}(x)=\frac{1}{\sqrt{2\pi b^2}}exp(-\frac{1}{2}\frac{x^2}{b^2}) εb2(x)=2πb21exp(−21b2x2)
如图为均值为0,方差为b2b^2b2的正态分布曲线。正态分布通常用于连续随机过程的噪声建立模型。
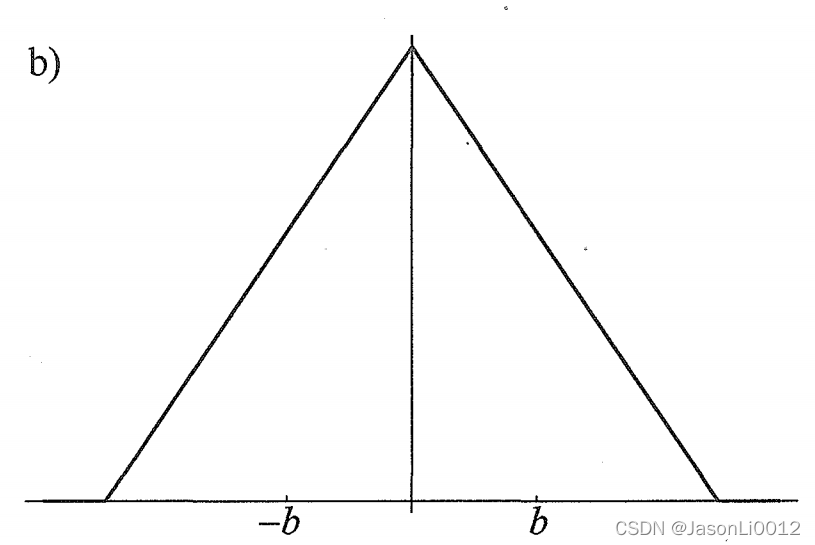
噪声也可以用三角形分布进行描述:
εb2(x)=max{0,16b−∣x∣6b2} \varepsilon_{b^2}(x)=\max\{0,\frac{1}{\sqrt 6b}-\frac{|x|}{6b^2}\} εb2(x)=max{0,6b1−6b2∣x∣}
如图为三角形分布曲线,它仅在(−6b,6b)(-\sqrt{6b},\sqrt{6b})(−6b,6b)区间内大于零。
由此,得到噪声下的机器人位姿:
[X′Y′θ′]=[XYθ]+[−v^tω^tsinθ+v^tω^tsin(θ+ωtΔt)v^tω^tcosθ−v^tω^tcos(θ+ωtΔt)ω^tΔt] \begin{bmatrix} X^{'}\\Y^{'}\\\theta^{'}\\ \end{bmatrix}=\begin{bmatrix} X\\Y\\\theta \end{bmatrix}+\begin{bmatrix} -\frac{\hat v_t}{\hat \omega_t}\sin\theta+\frac{\hat v_t}{\hat \omega_t}\sin(\theta+\omega_t\Delta t)\\ \frac{\hat v_t}{\hat \omega_t}\cos\theta-\frac{\hat v_t}{\hat \omega_t}\cos(\theta+\omega_t\Delta t)\\ \hat\omega_t\Delta t \end{bmatrix} ⎣⎡X′Y′θ′⎦⎤=⎣⎡XYθ⎦⎤+⎣⎡−ω^tv^tsinθ+ω^tv^tsin(θ+ωtΔt)ω^tv^tcosθ−ω^tv^tcos(θ+ωtΔt)ω^tΔt⎦⎤
最终航向
上述模型建立在机器人围绕半径为rrr的圆弧运动进行建模,但由于环境噪声原因,实际运动轨迹并非圆形。为推广模型,假设机器人抵达最终位姿时,旋转γ^t\hat\gamma_tγ^t:
θ′=θ+ω^tΔt+γ^tΔtγ^=εα5vt2+α6ωt2 \begin{aligned} \theta^{'}&=&\theta+\hat\omega_t\Delta t+\hat\gamma_t\Delta t\\ \hat\gamma&=&\varepsilon_{\alpha_5v_t^2+\alpha_6\omega_t^2} \end{aligned} θ′γ^==θ+ω^tΔt+γ^tΔtεα5vt2+α6ωt2
参量α5\alpha_5α5和α6\alpha_6α6为机器人里程计噪声参数,由此得到最终的运动模型:
[X′Y′θ′]=[XYθ]+[−v^tω^tsinθ+v^tω^tsin(θ+ωtΔt)v^tω^tcosθ−v^tω^tcos(θ+ωtΔt)ω^tΔt+γ^tΔt] \begin{bmatrix} X^{'}\\Y^{'}\\\theta^{'}\\ \end{bmatrix}=\begin{bmatrix} X\\Y\\\theta \end{bmatrix}+\begin{bmatrix} -\frac{\hat v_t}{\hat \omega_t}\sin\theta+\frac{\hat v_t}{\hat \omega_t}\sin(\theta+\omega_t\Delta t)\\ \frac{\hat v_t}{\hat \omega_t}\cos\theta-\frac{\hat v_t}{\hat \omega_t}\cos(\theta+\omega_t\Delta t)\\ \hat\omega_t\Delta t+\hat\gamma_t\Delta t \end{bmatrix} ⎣⎡X′Y′θ′⎦⎤=⎣⎡XYθ⎦⎤+⎣⎡−ω^tv^tsinθ+ω^tv^tsin(θ+ωtΔt)ω^tv^tcosθ−ω^tv^tcos(θ+ωtΔt)ω^tΔt+γ^tΔt⎦⎤
闭式算法
算法推导
计算在时间间隔Δt\Delta tΔt内,在控制量ut=[vtωt]Tu_t=\begin{bmatrix}v_t&\omega_t\end{bmatrix}^Tut=[vtωt]T的作用下,机器人位姿从初始位姿xt−1=[XYθ]Tx_{t-1}=\begin{bmatrix}X&Y&\theta\end{bmatrix}^Txt−1=[XYθ]T变为期望位姿xt=[X′Y′θ′]Tx_t=\begin{bmatrix}X^{'}&Y^{'}&\theta^{'}\end{bmatrix}^Txt=[X′Y′θ′]T的概率密度p(xt∣ut,xt−1)p(x_t | u_t,x_{t-1})p(xt∣ut,xt−1)
首先,计算将机器人从位姿xt−1x_{t-1}xt−1变换至位置[X′Y′]T\begin{bmatrix}X^{'}&Y^{'}\end{bmatrix}^T[X′Y′]T所需的控制量
模型假设机器人在Δt\Delta tΔt时间内速度恒定,运动轨迹形成圆弧。则对于圆弧圆心,其与机器人的初始位姿正交,其中λ\lambdaλ为未知量:
[X∗Y∗]=[XY]+[−λsinθλcosθ] \begin{bmatrix}X^*\\Y^*\end{bmatrix}=\begin{bmatrix}X\\Y\end{bmatrix}+\begin{bmatrix}-\lambda\sin\theta\\\lambda\cos\theta\end{bmatrix} [X∗Y∗]=[XY]+[−λsinθλcosθ]
同时,圆弧圆心位于点(X,Y)(X,Y)(X,Y)和点(X′,Y′)(X^{'},Y^{'})(X′,Y′)的垂直平分线上,其中μ\muμ为未知量:
[X∗Y∗]=[X+X′2+μ(Y−Y′)Y+Y′2+μ(X′−X)] \begin{bmatrix}X^*\\Y^*\end{bmatrix}=\begin{bmatrix} \frac{X+X^{'}}{2}+\mu(Y-Y^{'})\\ \frac{Y+Y^{'}}{2}+\mu(X^{'}-X) \end{bmatrix} [X∗Y∗]=[2X+X′+μ(Y−Y′)2Y+Y′+μ(X′−X)]
当ωt=0\omega_t=0ωt=0时,圆心位于无穷远处,机器人近似直线运动。;当wt≠0w_t\not=0wt=0时联立方程,得唯一解:
μ=12(X−X′)cosθ+(Y−Y′)sinθ(Y−Y′)cosθ−(X−X′)sinθ \mu=\frac{1}{2}\frac{(X-X^{'})\cos\theta+(Y-Y^{'})\sin\theta}{(Y-Y^{'})\cos\theta-(X-X^{'})\sin\theta} μ=21(Y−Y′)cosθ−(X−X′)sinθ(X−X′)cosθ+(Y−Y′)sinθ
带入等式,得到圆心坐标表达式:
[X∗Y∗]=[12(X+X′)+12(X−X′)cosθ+(Y−Y′)sinθ(Y−Y′)cosθ−(X−X′)sinθ(Y−Y′)12(Y+Y′)+12(X−X′)cosθ+(Y−Y′)sinθ(Y−Y′)cosθ−(X−X′)sinθ(X′−X)] \begin{bmatrix}X^{*}\\Y^{*}\end{bmatrix}=\begin{bmatrix} \frac{1}{2}(X+X^{'})+\frac{1}{2}\frac{(X-X^{'})\cos\theta+(Y-Y^{'})\sin\theta}{(Y-Y^{'})\cos\theta-(X-X^{'})\sin\theta}(Y-Y^{'})\\ \frac{1}{2}(Y+Y^{'})+\frac{1}{2}\frac{(X-X^{'})\cos\theta+(Y-Y^{'})\sin\theta}{(Y-Y^{'})\cos\theta-(X-X^{'})\sin\theta}(X^{'}-X) \end{bmatrix} [X∗Y∗]=⎣⎡21(X+X′)+21(Y−Y′)cosθ−(X−X′)sinθ(X−X′)cosθ+(Y−Y′)sinθ(Y−Y′)21(Y+Y′)+21(Y−Y′)cosθ−(X−X′)sinθ(X−X′)cosθ+(Y−Y′)sinθ(X′−X)⎦⎤
圆弧半径可以采用欧拉距离公式计算得到:
r∗=(X−X∗)2+(Y−Y∗)2 r^{*}=\sqrt{(X-X^{*})^2+(Y-Y^{*})^2} r∗=(X−X∗)2+(Y−Y∗)2
由此,得到机器人航向的变化量计算表达式:
Δθ=atan2(Y′−Y∗,X′−X∗)−atan2(Y−Y∗,X−X∗) \Delta\theta=atan2(Y^{'}-Y^*,X^{'}-X^*)-atan2(Y-Y^*,X-X^*) Δθ=atan2(Y′−Y∗,X′−X∗)−atan2(Y−Y∗,X−X∗)
函数atan2(y,x)atan2(y,x)atan2(y,x)表达式如下,大多数语言(如Python中math库)提供了对应API(math.atan2(y,x)):
atan2(y,x)={arctan(y/x)x>0sign(y)(π−arctan∣yx∣)x<00x=0,y=0sign(y)π2x=0,y≠0 atan2(y,x)=\begin{cases} \arctan(y/x)&x>0\\ sign(y)(\pi-\arctan|{\frac{y}{x}}|)&x<0\\ 0&x=0,y=0\\ sign(y)\frac{\pi}{2}&x=0,y\not=0 \end{cases} atan2(y,x)=⎩⎪⎪⎪⎨⎪⎪⎪⎧arctan(y/x)sign(y)(π−arctan∣xy∣)0sign(y)2πx>0x<0x=0,y=0x=0,y=0
式中,函数sign(x)sign(x)sign(x)为符号函数,表达式如下:
sign(x)={1x>00x=0−1x<0 sign(x)=\begin{cases} &1&x>0\\ &0&x=0\\ -&1&x<0 \end{cases} sign(x)=⎩⎪⎨⎪⎧−101x>0x=0x<0
从而,得到机器人的平移距离:
Δdist=r∗Δθ \Delta dist=r^*\Delta\theta Δdist=r∗Δθ
进而得到控制量的表达式:
u^t=[v^tω^t]=Δt−1[ΔdistΔθ] \hat u_t=\begin{bmatrix}\hat v_t\\ \hat \omega_t\end{bmatrix}=\Delta t^{-1}\begin{bmatrix}\Delta dist\\ \Delta \theta\end{bmatrix} u^t=[v^tω^t]=Δt−1[ΔdistΔθ]
其次,计算机器人抵达最终航向θ′\theta^{'}θ′所需的旋转γ^t\hat\gamma_tγ^t
γ^t=Δt−1(θ′−θ)−ω^t \hat \gamma_t=\Delta t^{-1}(\theta^{'}-\theta)-\hat \omega_t γ^t=Δt−1(θ′−θ)−ω^t
最后,计算机器人的概率密度p(xt∣ut,xt−1)p(x_t | u_t,x_{t-1})p(xt∣ut,xt−1)。
定义运动误差参量用于表示u^t\hat u_tu^t和γ^t\hat \gamma_tγ^t相对控制量ut=[vtωt]Tu_t=\begin{bmatrix}v_t&\omega_t\end{bmatrix}^Tut=[vtωt]T和旋转γt=0\gamma_t=0γt=0的偏差值。
verr=vt−v^tωerr=ωt−ω^tγerr=γ^t \begin{aligned} v_{err}&=v_t-\hat v_t\\ \omega_{err}&=\omega_t-\hat \omega_t\\ \gamma_{err}&=\hat \gamma_t\\ \end{aligned} verrωerrγerr=vt−v^t=ωt−ω^t=γ^t
由此,得到噪声误差:
εα1vt2+α2ωt2(verr)εα3vt2+α4ωt2(ωerr)εα5vt2+α6ωt2(γerr) \begin{aligned} \varepsilon_{\alpha_1v_t^2+\alpha_2\omega_t^2}(v_{err})\\ \varepsilon_{\alpha_3v_t^2+\alpha_4\omega_t^2}(\omega_{err})\\ \varepsilon_{\alpha_5v_t^2+\alpha_6\omega_t^2}(\gamma_{err})\\ \end{aligned} εα1vt2+α2ωt2(verr)εα3vt2+α4ωt2(ωerr)εα5vt2+α6ωt2(γerr)
假定,不同来源的误差噪声相互独立,则得到概率密度:
p(xt∣ut,xt−1)=εα1vt2+α2ωt2(verr)⋅εα3vt2+α4ωt2(ωerr)⋅εα5vt2+α6ωt2(γerr) p(x_t | u_t,x_{t-1})=\varepsilon_{\alpha_1v_t^2+\alpha_2\omega_t^2}(v_{err})\cdot\varepsilon_{\alpha_3v_t^2+\alpha_4\omega_t^2}(\omega_{err})\cdot\varepsilon_{\alpha_5v_t^2+\alpha_6\omega_t^2}(\gamma_{err}) p(xt∣ut,xt−1)=εα1vt2+α2ωt2(verr)⋅εα3vt2+α4ωt2(ωerr)⋅εα5vt2+α6ωt2(γerr)
算法设计
系统输入: 初始位姿xt−1=[XYθ]Tx_{t-1}=\begin{bmatrix}X&Y&\theta\end{bmatrix}^Txt−1=[XYθ]T、控制量ut=[vtωt]Tu_t=\begin{bmatrix}v_t&\omega_t\end{bmatrix}^Tut=[vtωt]T、估计后继姿态xt=[X′Y′θ′]Tx_t=\begin{bmatrix}X^{'}&Y^{'}&\theta^{'}\end{bmatrix}^Txt=[X′Y′θ′]T
系统输出: 后继姿态为xtx_txt的概率p(xt∣ut,xt−1)p(x_t | u_t,x_{t-1})p(xt∣ut,xt−1)
假设条件: 控制算法以固定时间间隔Δt\Delta tΔt执行。
用参数α1\alpha_1α1 ~ α6\alpha_6α6表示机器人里程计运动噪声系数:
- 里程计平移噪声
- 参数α1\alpha_1α1:平移运动中平移分量的噪声
- 参数α2\alpha_2α2:平移运动中旋转分量的噪声
- 里程计旋转噪声
- 参数α3\alpha_3α3:旋转运动中平移分量的噪声
- 参数α4\alpha_4α4:旋转运动中旋转分量的噪声
- 里程计航向噪声
- 参数α5\alpha_5α5:最终航向中平移分量的噪声
- 参数α6\alpha_6α6:最终航向中旋转分量的噪声
算法实现逻辑如下:
Algorithmmotion_model_velocity(xt,ut,xt−1):1:μ=12(X−X′)cosθ+(Y−Y′)sinθ(Y−Y′)cosθ−(X−X′)sinθ2:X∗=12(X+X′)+μ(Y−Y′)3:Y∗=12(Y+Y′)+μ(X′−X)4:r∗=(X−X∗)2+(Y−Y∗)25:Δθ=atan2(Y′−Y∗,X′−X∗)−atan2(Y−Y∗,X−X∗)6:v^t=ΔθΔt⋅r∗7:ω^t=ΔθΔt8:γ^t=θ′−θΔt−ω^t9:returnprob(vt−v^t,α1vt2+α2ωt2)⋅prob(ωt−ω^t,α3vt2+α4ωt2)⋅prob(γ^t,α5vt2+α6ωt2) \begin{aligned} &Algorithm\quad motion\_model\_velocity(x_t,u_t,x_{t-1}): \\ 1:&\quad\quad \mu=\frac{1}{2}\frac{(X-X^{'})\cos\theta+(Y-Y^{'})\sin\theta}{(Y-Y^{'})\cos\theta-(X-X^{'})\sin\theta}\\ 2:&\quad\quad X^{*}=\frac{1}{2}(X+X^{'})+\mu(Y-Y^{'})\\ 3:&\quad\quad Y^{*}=\frac{1}{2}(Y+Y^{'})+\mu(X^{'}-X)\\ 4:&\quad\quad r^{*}=\sqrt{(X-X^{*})^2+(Y-Y^{*})^2}\\ 5:&\quad\quad \Delta\theta=atan2(Y^{'}-Y^*,X^{'}-X^*)-atan2(Y-Y^*,X-X^*)\\ 6:&\quad\quad \hat v_t=\frac{\Delta\theta}{\Delta t}\cdot r^*\\ 7:&\quad\quad \hat \omega_t=\frac{\Delta\theta}{\Delta t}\\ 8:&\quad\quad \hat \gamma_t=\frac{\theta^{'}-\theta}{\Delta t}-\hat \omega_t\\ 9:&\quad\quad return\quad prob(v_t-\hat v_t,\alpha_1v^2_t+\alpha_2\omega^2_t)\cdot prob(\omega_t-\hat \omega_t,\alpha_3v^2_t+\alpha_4\omega^2_t)\cdot prob(\hat\gamma_t,\alpha_5v^2_t+\alpha_6\omega^2_t)\end{aligned} 1:2:3:4:5:6:7:8:9:Algorithmmotion_model_velocity(xt,ut,xt−1):μ=21(Y−Y′)cosθ−(X−X′)sinθ(X−X′)cosθ+(Y−Y′)sinθX∗=21(X+X′)+μ(Y−Y′)Y∗=21(Y+Y′)+μ(X′−X)r∗=(X−X∗)2+(Y−Y∗)2Δθ=atan2(Y′−Y∗,X′−X∗)−atan2(Y−Y∗,X−X∗)v^t=ΔtΔθ⋅r∗ω^t=ΔtΔθγ^t=Δtθ′−θ−ω^treturnprob(vt−v^t,α1vt2+α2ωt2)⋅prob(ωt−ω^t,α3vt2+α4ωt2)⋅prob(γ^t,α5vt2+α6ωt2)
函数prob(x,b2)prob(x,b^2)prob(x,b2)用于计算参量xxx在均值为0、方差为b2b^2b2下的概率。
可使用正太分布:
Algorithmprob_normal_distribution(x,b2):return12πb2exp(−12⋅x2b2) \begin{aligned} &Algorithm\quad prob\_normal\_distribution(x,b^2):\\ &\quad\quad return\quad \frac{1}{\sqrt{2\pi b^2}}\exp({-\frac{1}{2}\cdot\frac{x^2}{b^2}}) \end{aligned} Algorithmprob_normal_distribution(x,b2):return2πb21exp(−21⋅b2x2)
或三角形分布:
Algorithmprob_triangular_distribution(x,b2):returnmax{0,16b−∣x∣6b2} \begin{aligned} &Algorithm\quad prob\_triangular\_distribution(x,b^2):\\ &\quad\quad return\quad \max\{0,\frac{1}{\sqrt 6b}-\frac{|x|}{6b^2}\} \end{aligned} Algorithmprob_triangular_distribution(x,b2):returnmax{0,6b1−6b2∣x∣}
算法效果
在平面空间XOY下,设置机器人具有相同的初始姿态xt−1x_{t-1}xt−1和控制量utu_tut,则在不同里程计噪声参数下,模型具有不同效果。
当机器人具有中等误差(参数α1\alpha_1α1 ~ α6\alpha_6α6),则如图所示: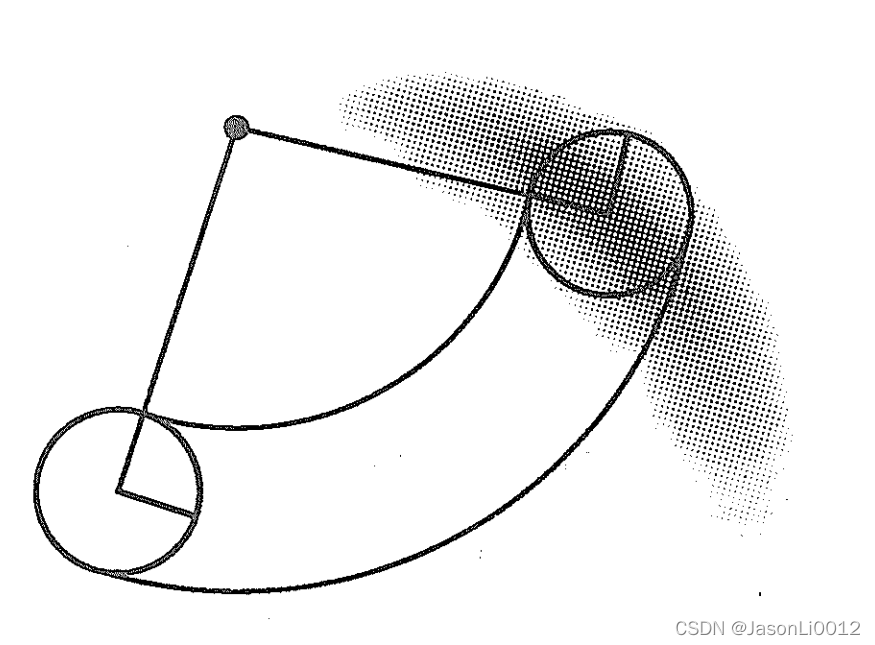
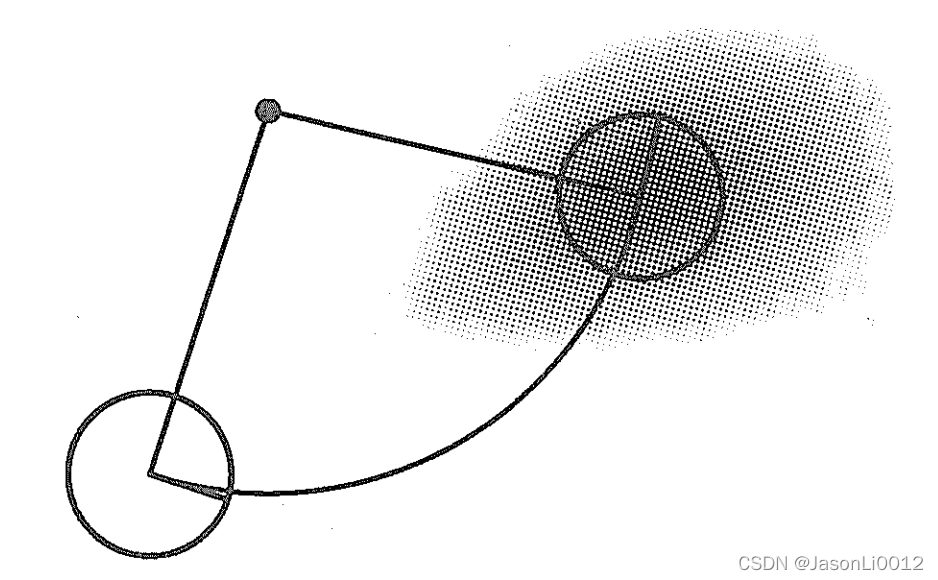
当机器人具有较大的平移误差(参数α1、α2\alpha_1、\alpha_2α1、α2),但具有较小的角度误差(参数α3、α4\alpha_3、\alpha_4α3、α4),则如图所示:
当机器人具有较小的平移误差(参数α1、α2\alpha_1、\alpha_2α1、α2),但具有较大的角度误差(参数α3、α4\alpha_3、\alpha_4α3、α4),则如图所示: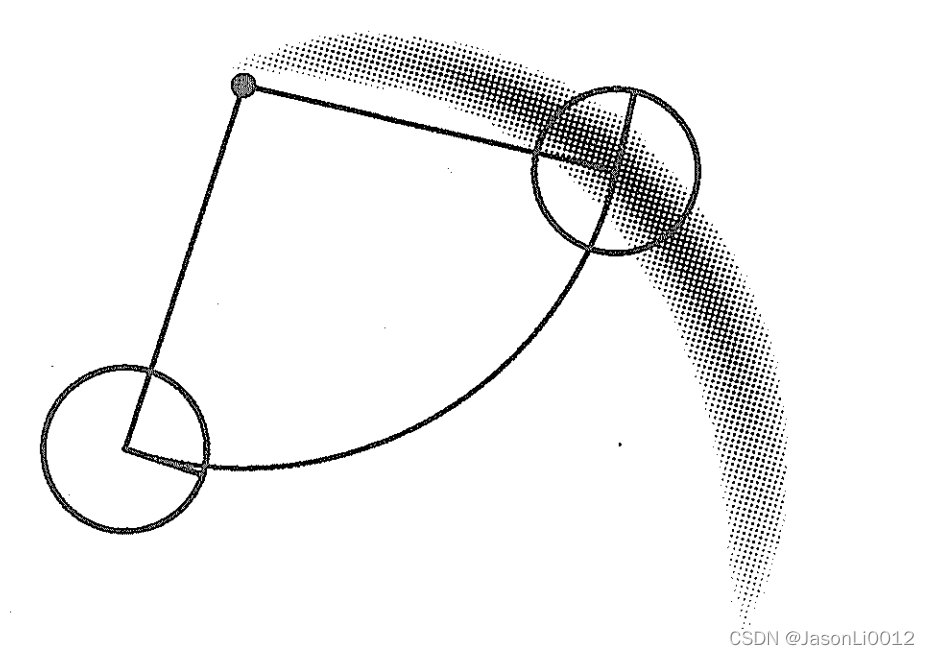
采样算法
算法推导
针对速度运动模型,采用粒子滤波计算噪声项并带入公式计算即可得到预测位姿。
算法设计
系统输入: 初始位姿xt−1=[XYθ]Tx_{t-1}=\begin{bmatrix}X&Y&\theta\end{bmatrix}^Txt−1=[XYθ]T、控制量ut=[vtωt]Tu_t=\begin{bmatrix}v_t&\omega_t\end{bmatrix}^Tut=[vtωt]T
系统输出: 估计后继姿态xt=[X′Y′θ′]Tx_t=\begin{bmatrix}X^{'}&Y^{'}&\theta^{'}\end{bmatrix}^Txt=[X′Y′θ′]T
假设条件: 控制算法以固定时间间隔Δt\Delta tΔt执行。
采样算法采用粒子滤波进行,旨在根据给定的控制量utu_tut和初始位姿xt−1x_{t-1}xt−1,采用运动模型p(xt∣ut,xt−1)p(x_t | u_t,x_{t-1})p(xt∣ut,xt−1)产生一个随机的xtx_txt,算法的设计流程如下:
Algorithmsample_motion_model_velocity(ut,xt−1):1:v^t=vt+sample(α1vt2+α2ωt2)2:ω^t=ωt+sample(α3vt2+α4ωt2)3:γ^t=sample(α5vt2+α6ωt2)4:x′=x−v^tω^tsinθ+v^tω^tsin(θ+ω^tΔt)5:y′=y+v^tω^tcosθ−v^tω^tcos(θ+ω^tΔt)6:θ′=θ+ω^tΔt+γ^tΔt7:returnxt=[x′y′θ′]T \begin{aligned} &Algorithm\quad sample\_motion\_model\_velocity(u_t,x_{t-1}):\\ 1:&\quad\quad \hat v_t=v_t+sample(\alpha_1 v^2_t+\alpha_2\omega^2_t) \\ 2:&\quad\quad \hat \omega_t=\omega_t+sample(\alpha_3 v^2_t+\alpha_4\omega^2_t) \\ 3:&\quad\quad \hat \gamma_t=sample(\alpha_5 v^2_t+\alpha_6\omega^2_t) \\ 4:&\quad\quad x^{'}=x-\frac{\hat v_t}{\hat \omega_t}\sin\theta+\frac{\hat v_t}{\hat \omega_t}\sin(\theta+\hat\omega_t\Delta t) \\ 5:&\quad\quad y^{'}=y+\frac{\hat v_t}{\hat \omega_t}\cos\theta-\frac{\hat v_t}{\hat \omega_t}\cos(\theta+\hat\omega_t\Delta t) \\ 6:&\quad\quad \theta^{'}=\theta+\hat\omega_t\Delta t+\hat\gamma_t\Delta t \\ 7:&\quad\quad return\quad x_t=\begin{bmatrix}x^{'}&y^{'}&\theta^{'}\end{bmatrix}^T \end{aligned} 1:2:3:4:5:6:7:Algorithmsample_motion_model_velocity(ut,xt−1):v^t=vt+sample(α1vt2+α2ωt2)ω^t=ωt+sample(α3vt2+α4ωt2)γ^t=sample(α5vt2+α6ωt2)x′=x−ω^tv^tsinθ+ω^tv^tsin(θ+ω^tΔt)y′=y+ω^tv^tcosθ−ω^tv^tcos(θ+ω^tΔt)θ′=θ+ω^tΔt+γ^tΔtreturnxt=[x′y′θ′]T
首先,1~3行采用运动学模型误差产生控制量的噪声;随后,4~6行使用噪声生成新的机器人位姿。式中函数sample(b2)sample(b^2)sample(b2)用于产生以0为均值,b2b^2b2为方差的随机样本。
可使用(近似)正态分布实现函数:
Algorithmsample_normal_distribution(b2):return12∑i=112rand(−b,b) \begin{aligned} &Algorithm\quad sample\_normal\_distribution(b^2):\\ &\quad\quad return\quad \frac{1}{2}\sum_{i=1}^{12}rand(-b,b) \end{aligned} Algorithmsample_normal_distribution(b2):return21i=1∑12rand(−b,b)
或使用三角形分布实现函数:
Algorithmsample_triangular_distribution(b2):return62[rand(−b,b)+rand(−b,b)] \begin{aligned} &Algorithm\quad sample\_triangular\_distribution(b^2):\\ &\quad\quad return\quad \frac{\sqrt6}{2}[rand(-b,b)+rand(-b,b)] \end{aligned} Algorithmsample_triangular_distribution(b2):return26[rand(−b,b)+rand(−b,b)]
式中,函数rand(x,y)rand(x,y)rand(x,y)用于在xxx到yyy之间生成一个均匀分布的伪随机数产生器。
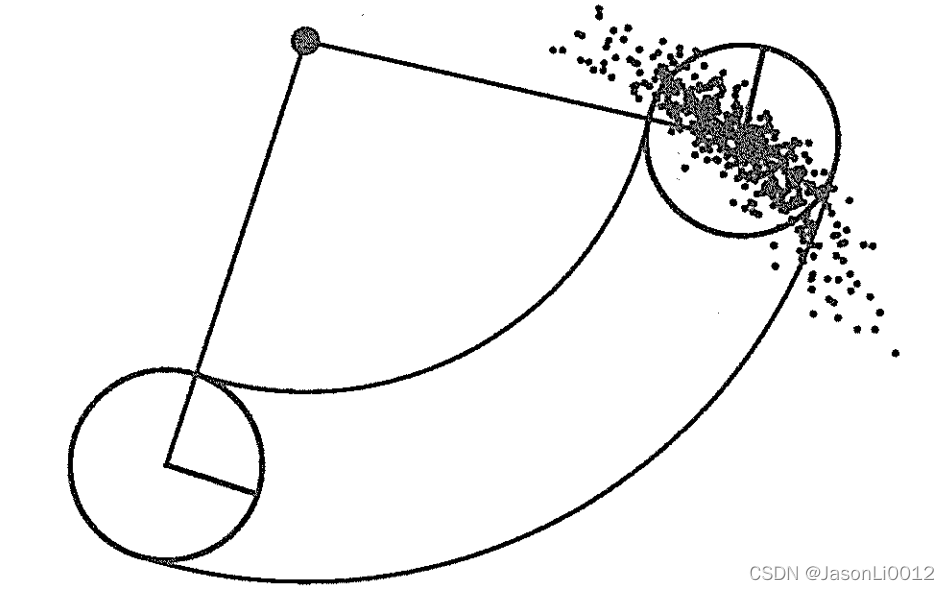
算法效果
在平面空间XOY下,设置机器人具有相同的初始姿态xt−1x_{t-1}xt−1和控制量utu_tut,且控制量与初始位姿同闭式计算中相同,则在不同不同里程计噪声参数下,具有不同效果。
当机器人具有中等误差(参数α1\alpha_1α1 ~ α6\alpha_6α6),则如图所示:
当机器人具有较大的平移误差(参数α1、α2\alpha_1、\alpha_2α1、α2),但具有较小的角度误差(参数α3、α4\alpha_3、\alpha_4α3、α4),则如图所示:
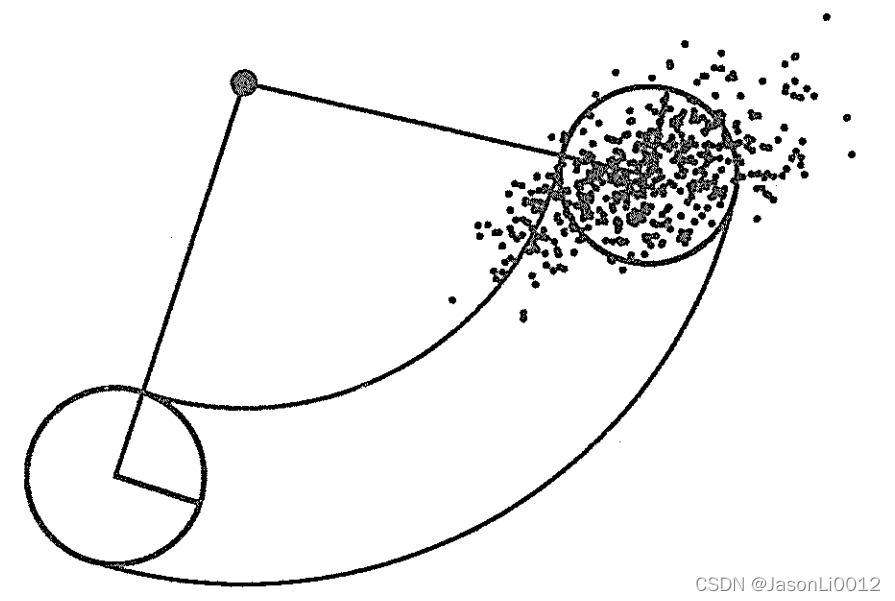
当机器人具有较小的平移误差(参数α1、α2\alpha_1、\alpha_2α1、α2),但具有较大的角度误差(参数α3、α4\alpha_3、\alpha_4α3、α4),则如图所示: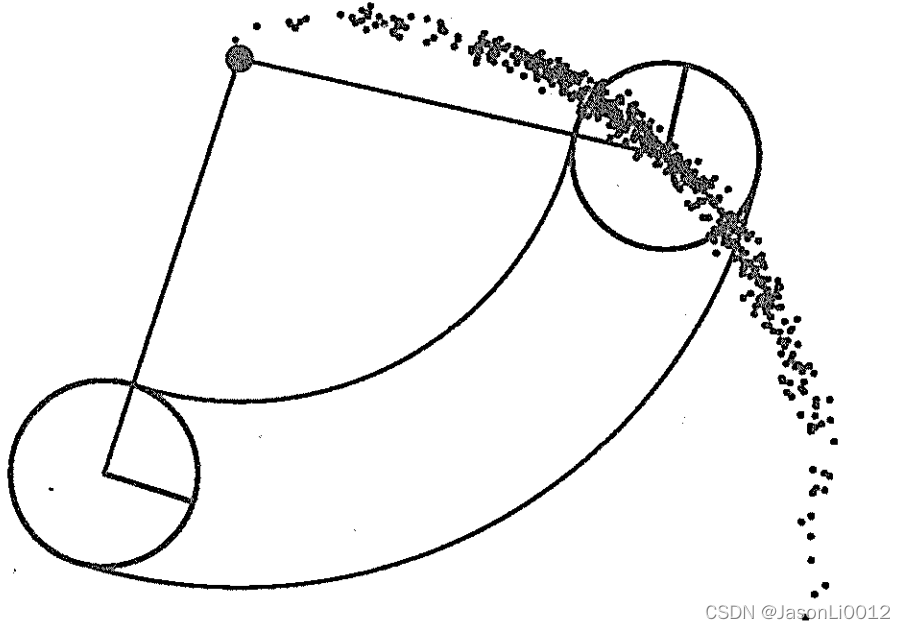

有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐

 5
5 0
0- 0



 已为社区贡献16条内容
已为社区贡献16条内容

所有评论(0)