ROS: No planning plugin loaded. Cannot plan. (MoveIT)
·
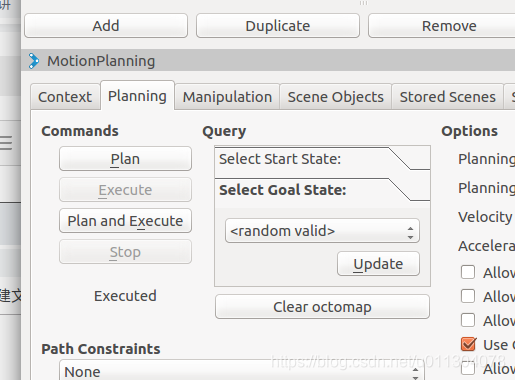
在试用rviz进行运动规划的时候,成功的导入模型后,但是点击plan and execut按键后,机械臂并没有运动,而且gui上提示failed,且提示如下错误:
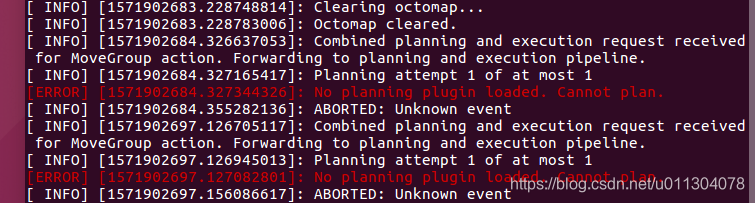
原因: 没有安装moveit,因为刚开始接触ros,前期很多问题都合配置有关。
解决方法:
sudo apt-get install ros-kinetic-moveitsource /opt/ros/kinetic/setup.bash
参考:https://www.cnblogs.com/valon/p/8556147.html

有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐
 2
2 0
0- 0



 已为社区贡献6条内容
已为社区贡献6条内容

所有评论(0)