《雷达目标特性》 学习笔记(一)
目录第一章 概论雷达目标特性含义及内容三级目录第一章 概论雷达目标特性含义及内容三级目录
·
第1章 概述
雷达(Radio Detecting and Ranging, RADAR)的最终目的是获取雷达目标信息,分为雷达目标的运动与轨迹信息(尺度信息),几何形状和物理参数等特征信息。
雷达目标分为合作目标和非合作目标。
1.1 雷达目标特性含义及内容
从目标参数的角度对雷达分类
| 雷达目标特性 | 雷达分类 | 作用 |
|---|---|---|
| 尺度信息 | 尺度测量(metric measurement)雷达 | 获得目标三维位置坐标、速度、加速度及运动轨迹等参数。对目标检测。 |
| 特征信息 | 特征测量(signature measurement)雷达 | 获得雷达散射截面(RCS)及其统计特征参数、极化散射矩、散射中心分布等参量。对目标进行分类、辨别与识别。 |
1.2 雷达与雷达目标的匹配
雷达产生无线电辐射信号,通过雷达目标散射,得到雷达回波,设计者需从回波中获取最多最确定的目标信息。因此,雷达的设计参数应与其目标特性匹配。
以下为从能量观点分析雷达检测目标的信号流程。
发射波信号作用于目标后 s(t)=e(t)*h(t)
接收系统终端输出信号 r(t)=s(t)*k(t)
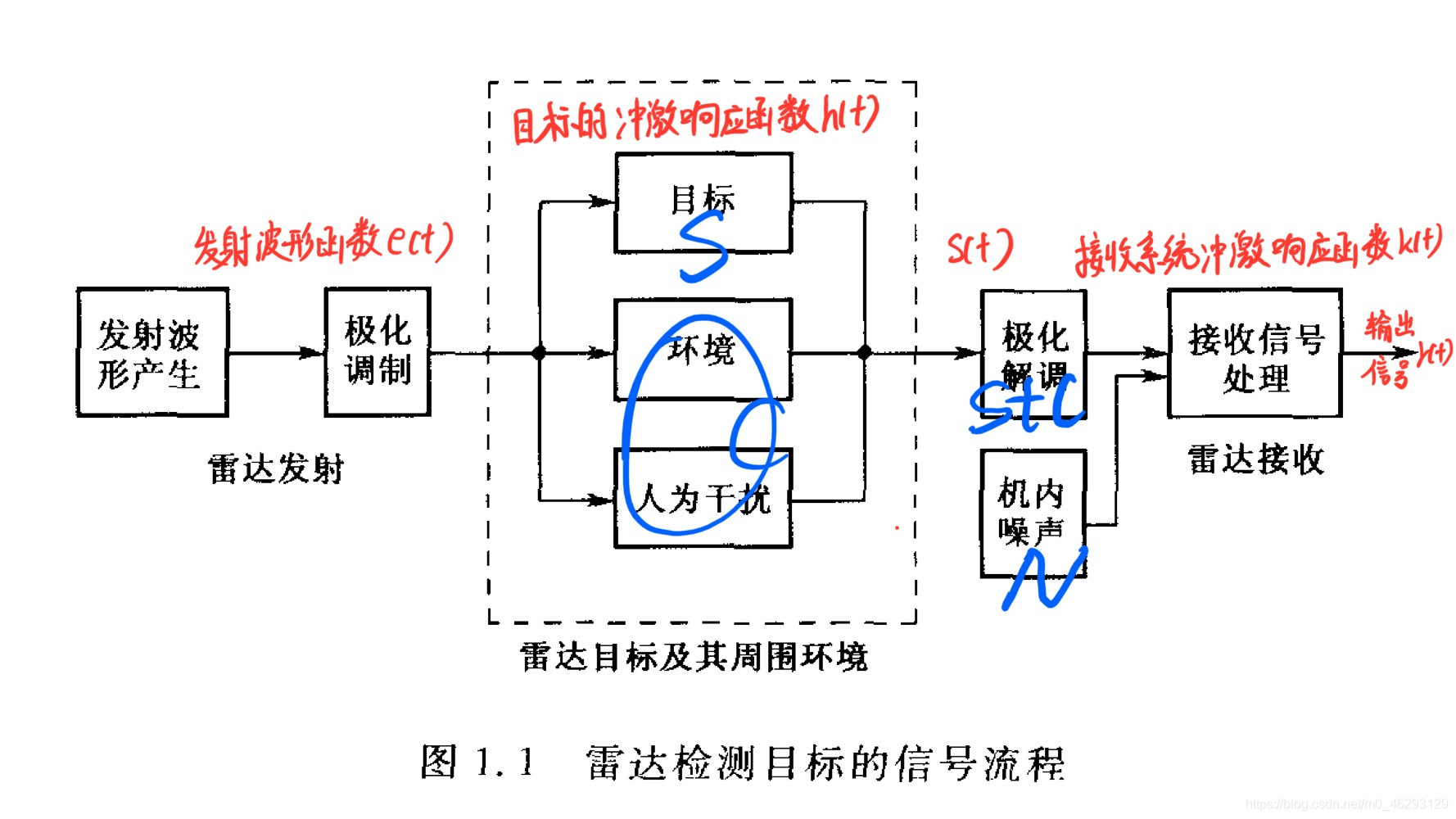
这个过程中接收系统会接收到环境和人为干扰等杂波信号,接收机本身也有机内噪声,下式为接收系统输出端的信号干扰能量比。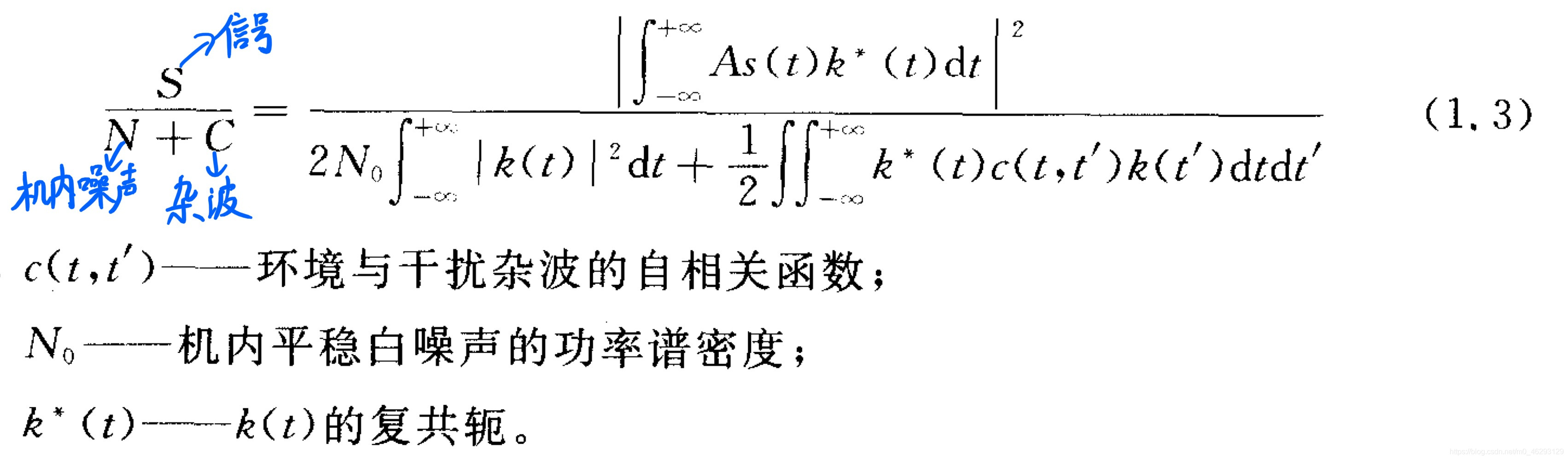
雷达设计者的任务是使该信噪比最大。
最大信噪比对应的最佳接收系统冲激函数k(t)与发射波形、杂波及目标冲激响应有关。因此,设计雷达时应考虑环境特性和目标特性。
1.3 测量目标形体特征
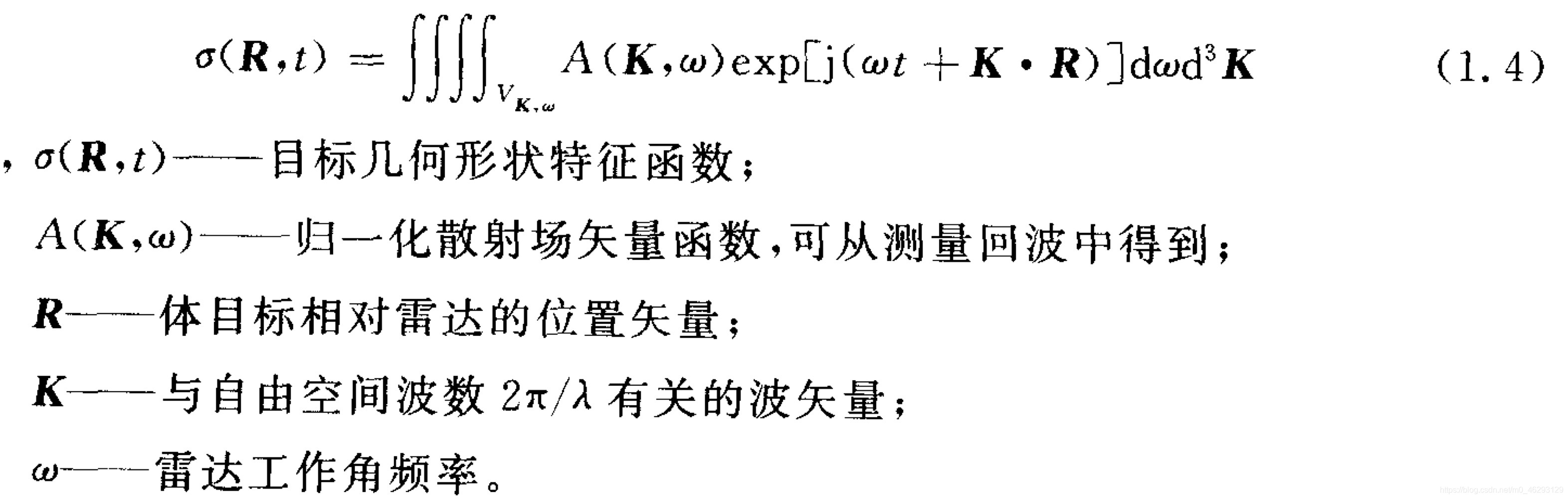
上式表明
理论上:在K波矢量三维空间(两个欧拉角内全观察)和雷达工作角频率全谱域内进行目标测量,则可以重构雷达目标的三位形状和体积。
实际上:雷达观察目标的姿态角只能在有限的欧拉角之内,且雷达的瞬时带宽总是有限的,如此缺维状态下雷达只能获得有限的目标形体特性和识别能力。 但是只要雷达是宽带雷达,则可获得虽有限但丰富的雷达目标形体信息及其他特征信息。

有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐
 1
1 0
0- 0



 已为社区贡献2条内容
已为社区贡献2条内容

所有评论(0)