红外无人机目标跟踪方法:MAMC
一种先进的红外无人机目标跟踪方法
论文信息:

摘要
现有的无人机(UAV)跟踪器未能有效解决红外模态下遮挡、复杂运动、背景杂波等挑战。为此,我们提出了一种新型跟踪器MAMC。我们首先采用数据增强策略来增强训练数据集,接着引入一种候选目标关联匹配方法来应对红外模式下大量相似目标存在而引发的干扰问题,然后利用一种带有窗口抖动补偿的运动估计算法来解决背景杂波和遮挡引起的跟踪不稳定性。此外,我们还采用了简单但有效的目标重新搜索和更新策略,来解决无人机目标的复杂运动和定位问题。实验结果表明,所提出的跟踪器在Anti-UAV数据集上实现了最先进的性能。
主要贡献
-
提出了一种新型的红外模态下无人机跟踪器,可以有效解决在复杂环境中无人机跟踪不稳定的问题。
-
提出了一个运动估计模块,以解决红外模态下无人机跟踪面临的遮挡和背景杂波问题。
-
设计了目标重新搜索和更新模块,以解决复杂运动轨迹和小目标问题
方法
MAMC网络包括:目标检测与候选目标生成,候选目标匹配,运动估计和重搜索与更新四个部分组成。
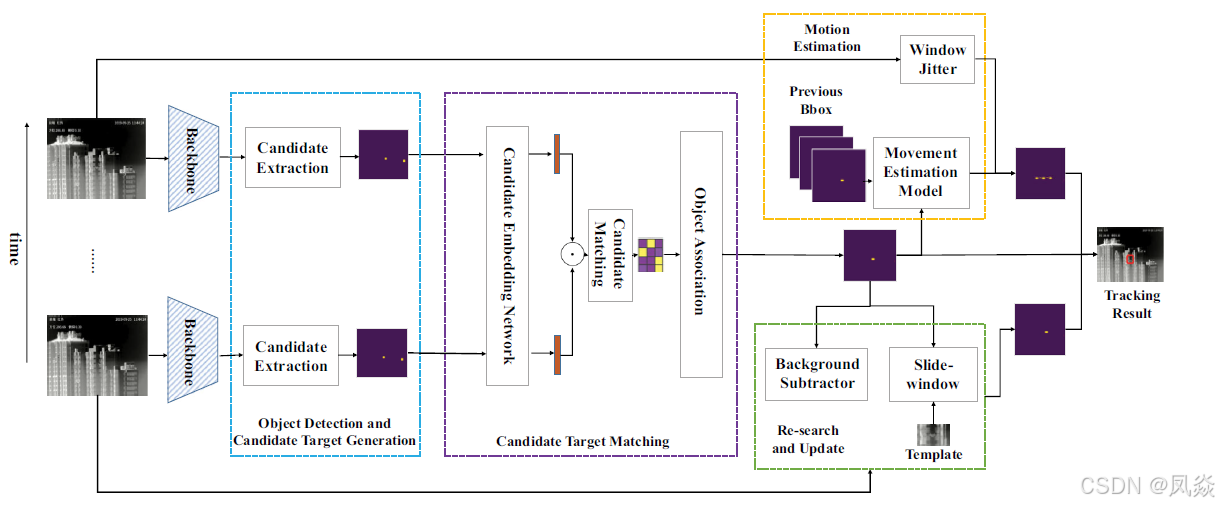
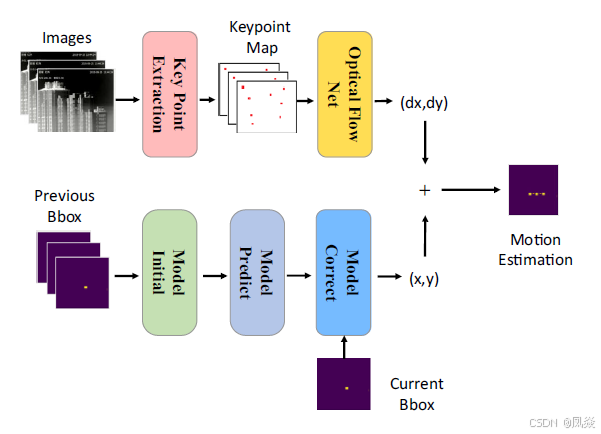
其中,运动估计包括基于光流的关键点匹配和基于卡尔曼滤波的位置估计。前者用来估计无人机跟踪过程中相机的偏移,后者估计无人机本身的运动状态,两者结合得到无人机真实运动轨迹。
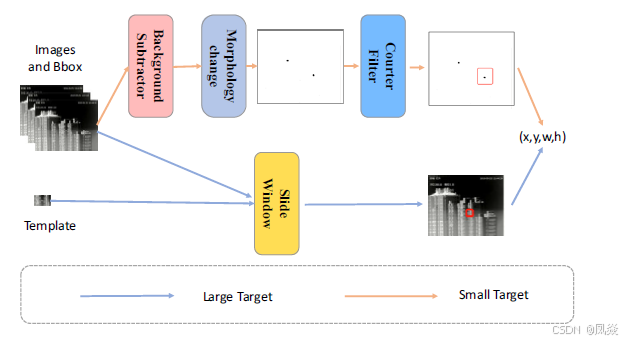
重搜索与更新主要包括对于小目标的背景分割以及对于大目标的滑动窗口,根据不同尺寸目标的特点,在目标丢失后采用不同的方法重新寻找目标。
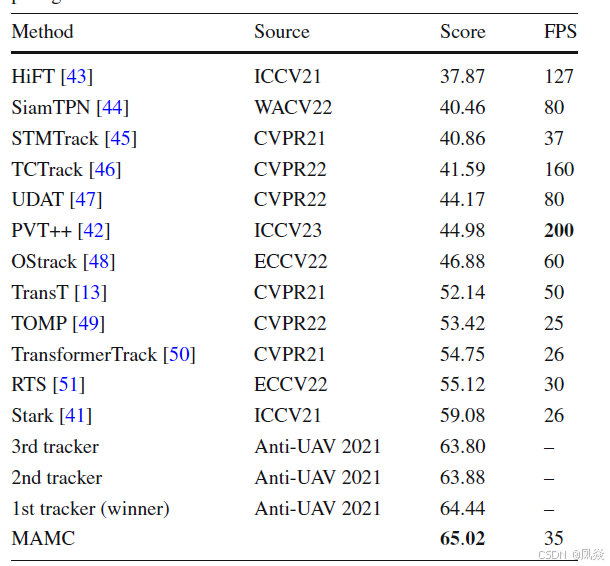
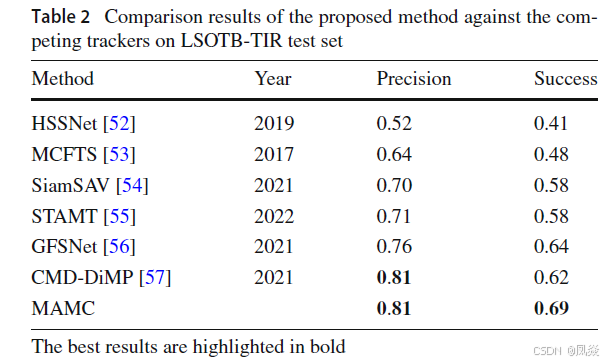
实验结果
数据集:Anti-UAV数据集(The 2nd anti-uav workshop & challenge: methods and results)
LSOTB-TIR数据集(Lsotb-tir: a large-scale high-diversity thermal infrared object tracking benchmark)
指标:

有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐

 5
5 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)