机器人运动学标定:基于指数积的串联机构运动学标定
写在前面
(建议阅读本文前,了解并熟悉旋量物理意义及旋量建模原理)
由Chasles定理可知,任一刚体运动作为螺旋运动对应于某个旋量,所以基于指数积公式的误差模型具有完整性;另一方面,从李代数到李群的指数映射是光滑映射,保证了基于指数积公式的误差模型具有连续性。因此采用指数积公式得到的误差模型具备完整性和连续性,这有利于误差模型法参数辨识。若能推导出具有显式表达式的误差模型,则可为分析参数的冗余性提供基础。
同DH标定方法一样,建立运动学误差模型,必须首先建立运动学误差相对于DH中运动变量和连杆参数偏差的微分公式,同理要建立基于指数积公式的串联机构误差模型,首先需要求解指数映射关于关节旋量、初始位姿旋量和关节变量的微分。
建模
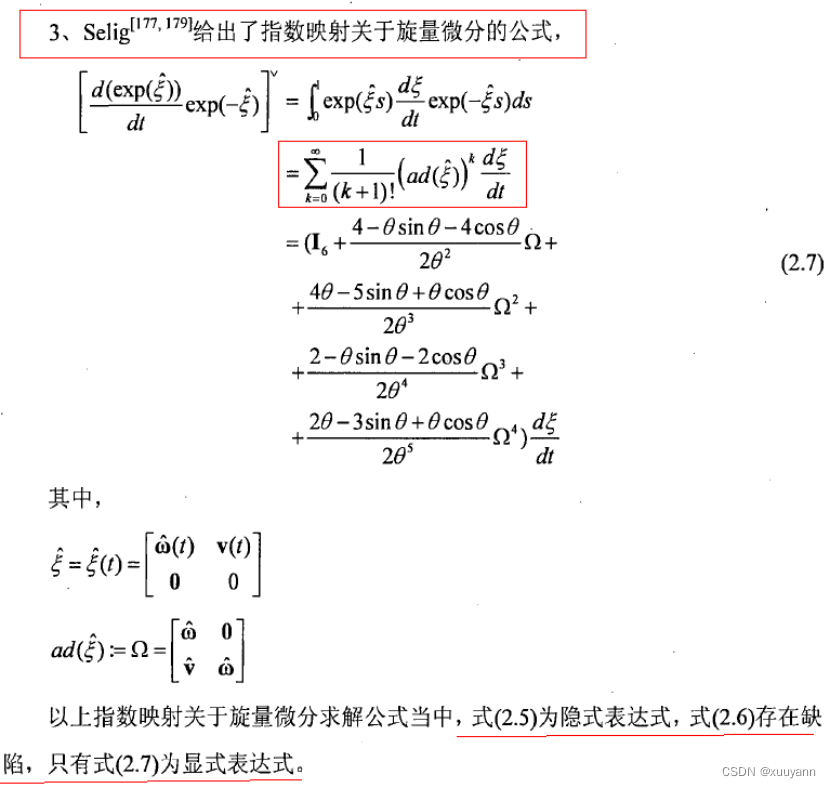
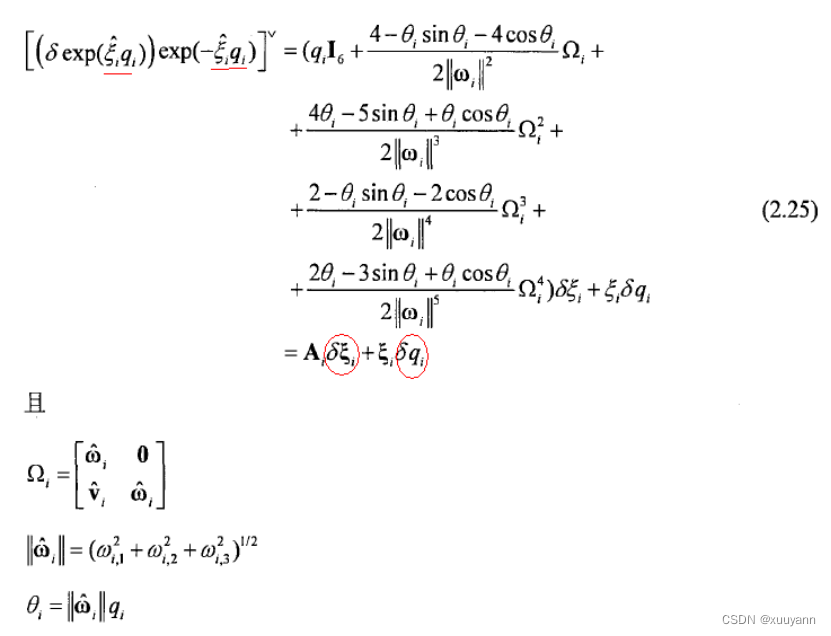
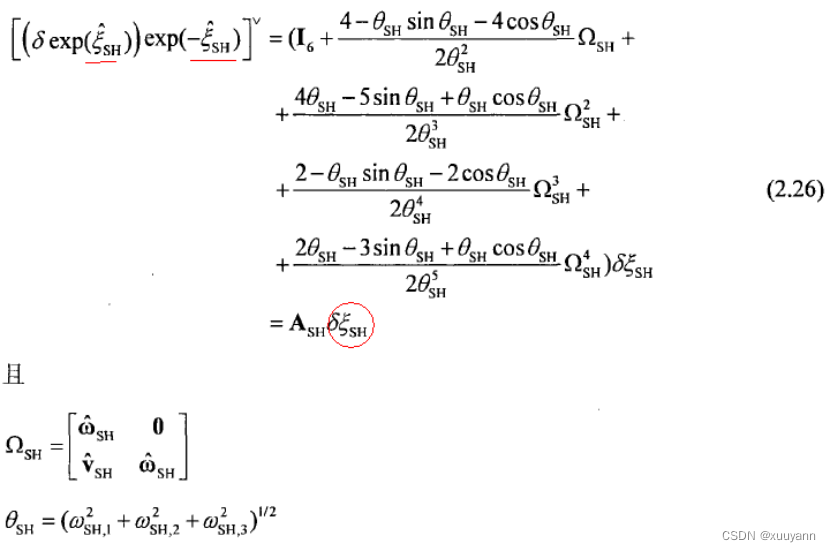
为了分析误差模型的参数可辨识性,要求误差模型为显式表达式。故在(2.7)基础上进一步推导指数映射关于关节旋量和关节零位偏差微分公式的显式表达式。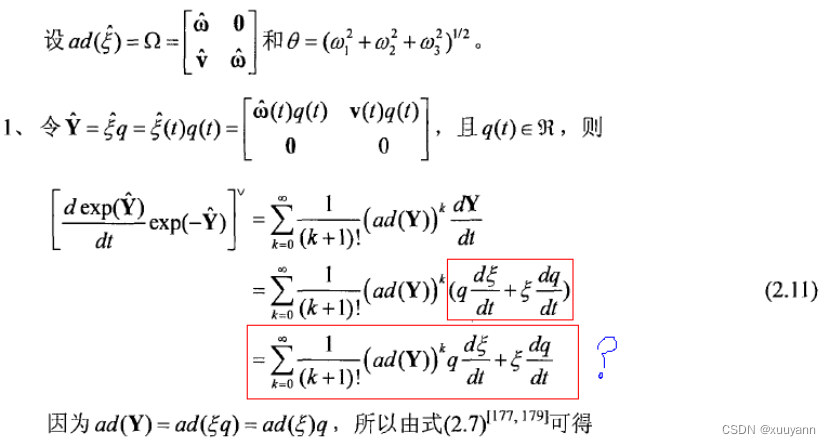
上面实际上是单位螺旋轴,w表示的是单位旋转轴,则theta实际上等于1.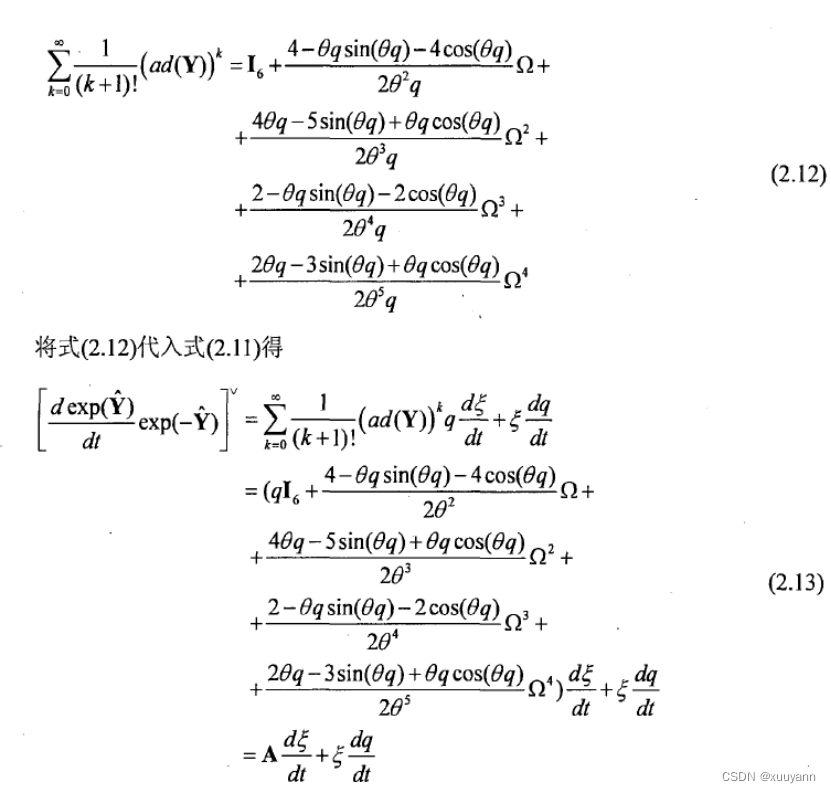
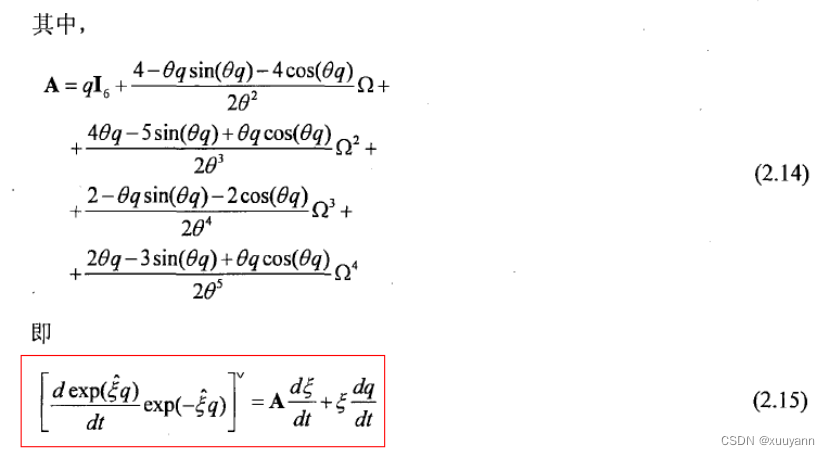
公式(2-15)即为建立得到的指数映射微分误差螺旋轴与关节螺旋轴与关节零位偏差之间的显示表达式。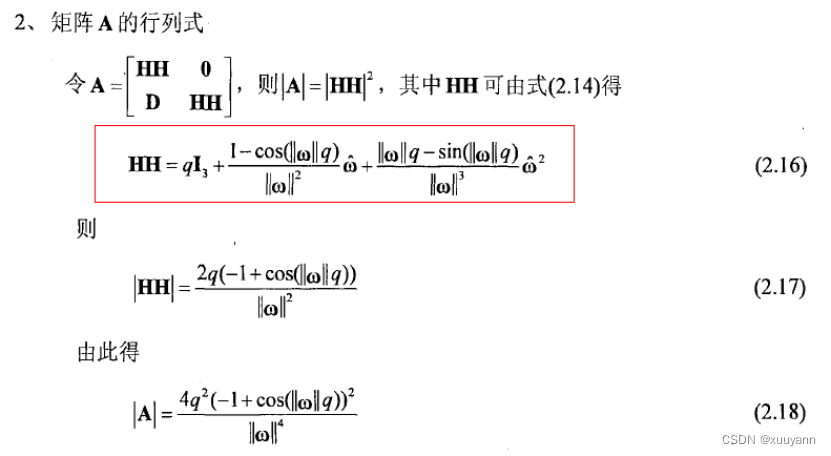
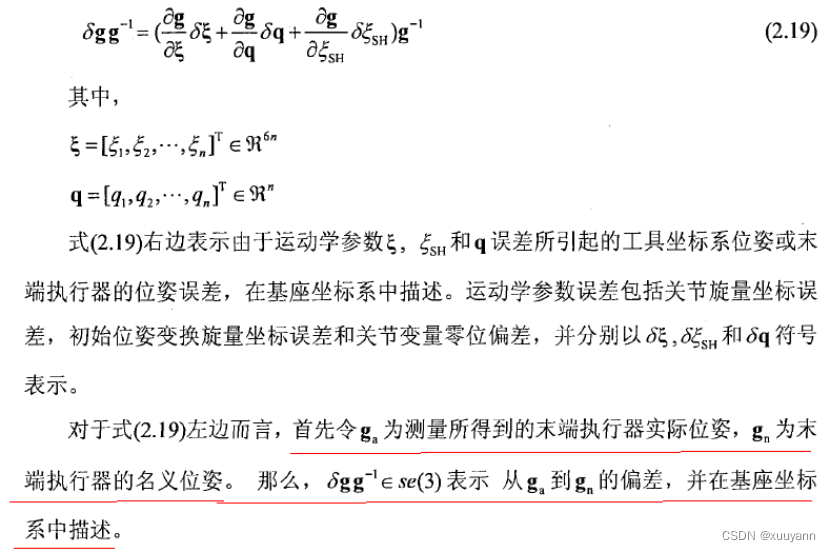
误差模型的作用就是将末端工具坐标系的位姿偏差(可以理解为实际测量位姿和名义位姿之间的偏差),与关节旋量轴偏差、关节零位偏差以及初始工具坐标系位姿变换旋量轴偏差,之间的关系来联系起来。
对指数积正运动学公式(2.3)线性化,得到(2.19)串联机构通用运动学误差模型。
这里的逻辑应该是,首先分析在基座标系下的测量得到的末端执行器实际位姿与名义位姿之间的误差表达式,根据微分运动学原理可知在基座标系下的末端位姿偏差为:
δ g = g a − g n \delta g=g_a-g_n δg=ga−gn
相对于基座标系的微分运动可表示为:
g a − g n = Δ ⋅ g n g_a-g_n=\Delta \cdot g_n ga−gn=Δ⋅gn
Δ = g a ⋅ g n − 1 − I \Delta=g_a \cdot g_n^{-1}-I Δ=ga⋅gn−1−I
δ g ⋅ g n − 1 = g a ⋅ g n − 1 − I \delta g \cdot g_n^{-1}=g_a \cdot g_n^{-1}-I δg⋅gn−1=ga⋅gn−1−I
这样就和前面分析的(2-13)和(2-15)联系起来
然后需要对g正运动学公式(2.3)进行全微分线性化,得到微分运动学公式:
δ g = ∂ g ∂ ξ δ ξ + ∂ g ∂ q δ q + ∂ g ∂ ξ S H δ ξ S H \delta \mathrm{g}=\frac{\partial \mathrm{g}}{\partial \xi} \delta \xi+\frac{\partial \mathrm{g}}{\partial \mathrm{q}} \delta \mathrm{q}+\frac{\partial \mathrm{g}}{\partial \xi_{\mathrm{SH}}} \delta \xi_{\mathrm{SH}} δg=∂ξ∂gδξ+∂q∂gδq+∂ξSH∂gδξSH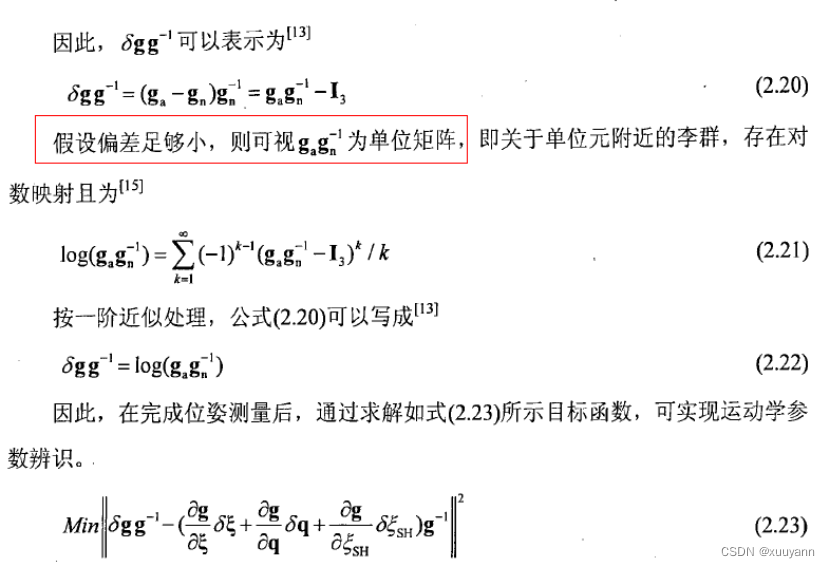
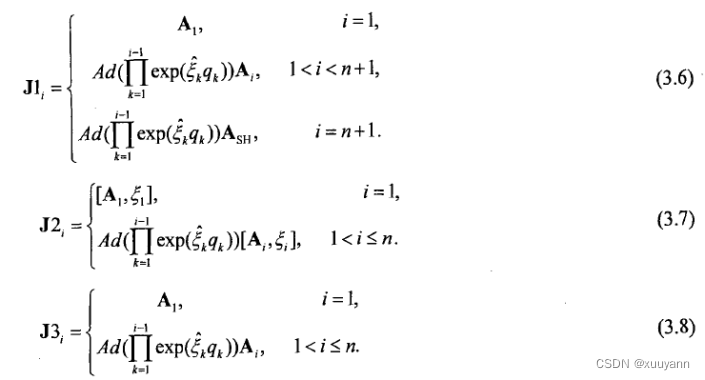
Eq(2.23)即为基于指数积公式的误差模型法参数辨识的基本原理。对eq(2.19)线性化全微分公式进一步推导得到,如何想更好地理解公式(2.24)怎么来的,可以自己手推一下指数积对各个螺旋轴求偏导: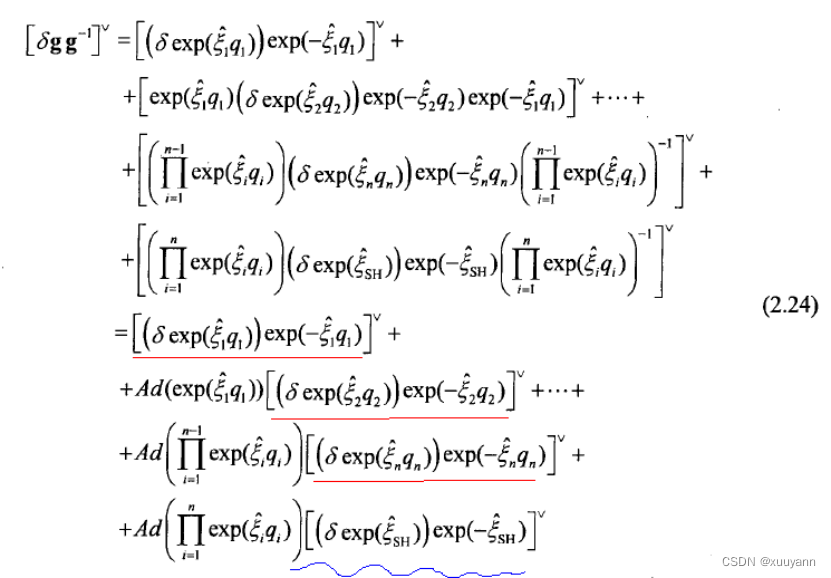
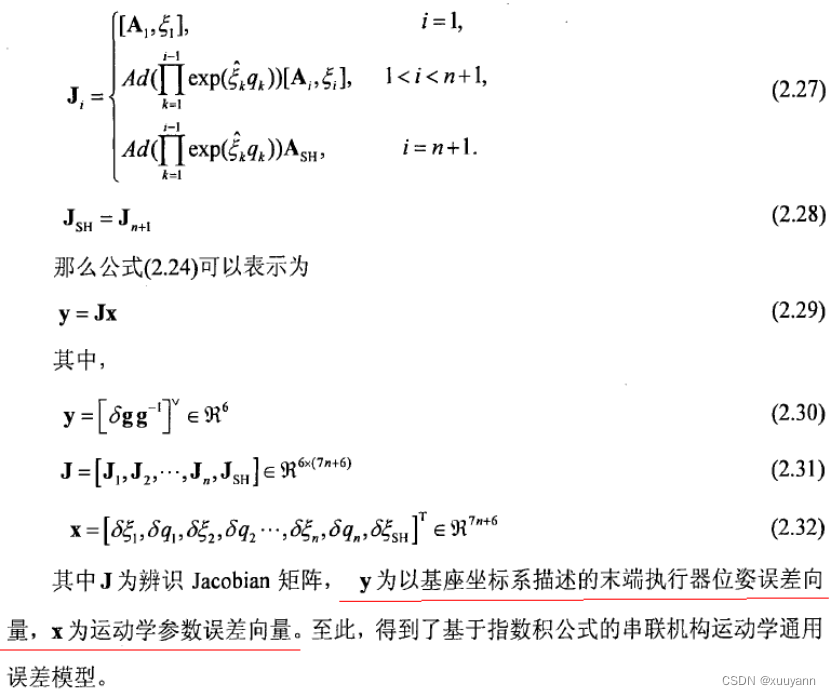
综上,建立得到辨识模型。
三个实用的误差模型
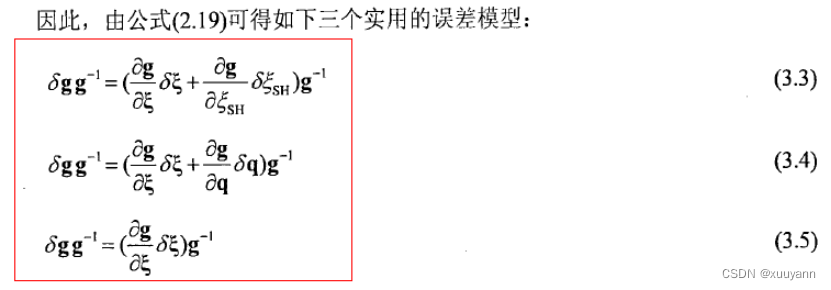
三个模型在使用时需要注意如下两点:
第一: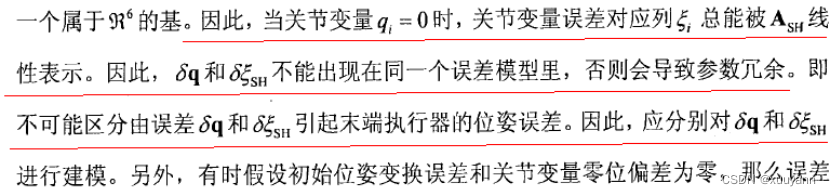
第二:

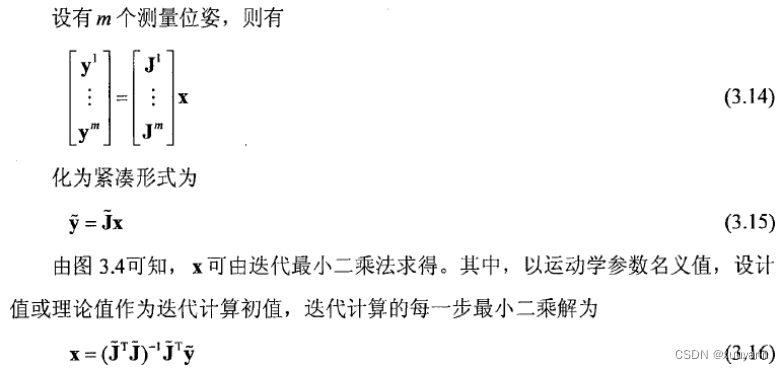
分析完毕,辨识步骤如下

eq(3.17)更新得到的螺旋轴是不满足旋转轴单位化与w和v正交化约束的,因此需要根据如下表格去处理更新迭代后的螺旋轴: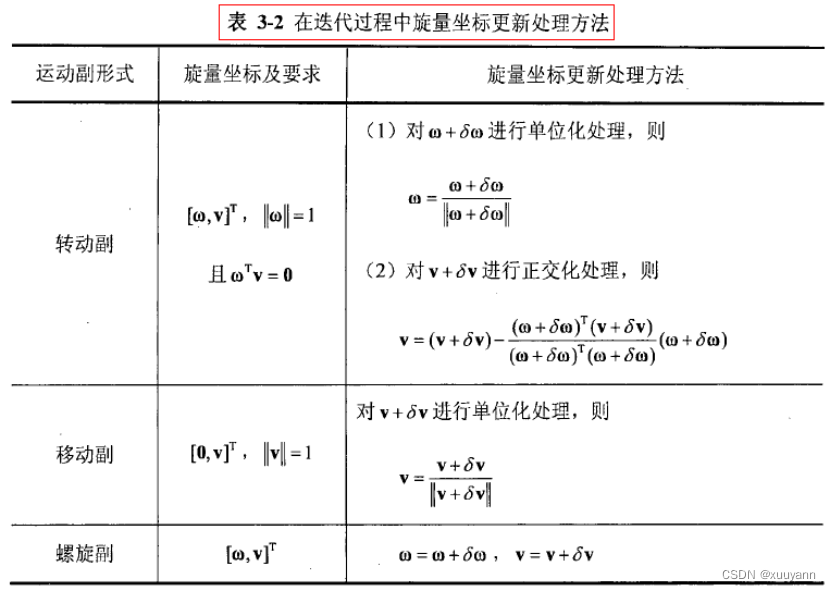
实现效果
实际参数:
标定参数: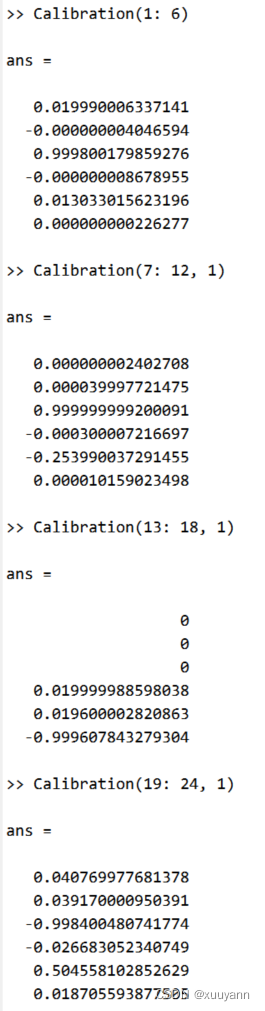
标定前最大误差与平均误差(mm):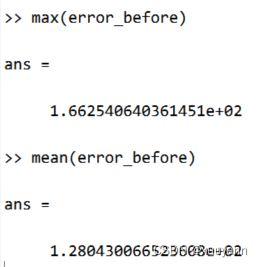
标定后最大误差与平均误差(mm):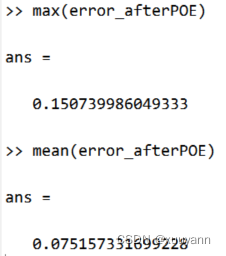
参考文献
[1] 熊有伦. 机器人学: 建模, 控制与视觉[M]. 华中科技大学出版社, 2018.
[2] Lynch K M, Park F C. Modern robotics[M]. Cambridge University Press, 2017.
[3] 何锐波. 基于指数积公式的串联机构运动学标定方法研究[D].华中科技大学,2010.
[4] He R, Zhao Y, Yang S, et al. Kinematic-parameter identification for serial-robot calibration based on POE formula[J]. IEEE Transactions on Robotics, 2010, 26(3): 411-423.

有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐


 4
4 0
0- 0



 已为社区贡献14条内容
已为社区贡献14条内容

所有评论(0)