全息广告机上的POV扇形取模的一种简单实现方式
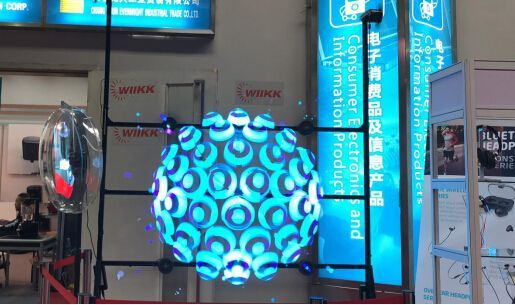
如果你在网上用google搜索“POV led”一词(POV即persistancd of vision),会找到世界各地的各种LED旋转屏的制作介绍。那些摇晃出的空中图案,漂浮在车轮上的动画,以及形态各异的时钟,一定给你留下深刻印象。其实他的实现原理很简单,通过视觉暂留现象,让显示的内容在人脑中呈现出连贯的图像。而难点在于常规的图片像素点是在直角坐标下描述的,而旋转LED设备是典型的极坐标体系,
如果你在网上用google搜索“POV led”一词(POV即persistancd of vision),会找到世界各地的各种LED旋转屏的制作介绍。那些摇晃出的空中图案,漂浮在车轮上的动画,以及形态各异的时钟,一定给你留下深刻印象。其实他的实现原理很简单,通过视觉暂留现象,让显示的内容在人脑中呈现出连贯的图像。而难点在于常规的图片像素点是在直角坐标下描述的,而旋转LED设备是典型的极坐标体系,需要将常规图片转换成极坐标上的像素点,才能正常显示,本文介绍了一种使用python实现的简单的方法将图像的像素点由直角坐标转换成极坐标。
python上集成opencv模块,使用opencv上的转换函数可以轻松将直角坐标转换成极坐标,参考《Python-openCV极坐标变换(图像变换)》https://blog.csdn.net/clm1206/article/details/79786151?utm_medium=distribute.pc_relevant.none-task-blog-BlogCommendFromMachineLearnPai2-1.edu_weight&depth_1-utm_source=distribute.pc_relevant.none-task-blog-BlogCommendFromMachineLearnPai2-1.edu_weight
然后使用使用pyqt开发ui界面,就可以制作一个简单的取模软件。
直角坐标与极坐标对应转换关系:
x,y=cv2.polarToCart(r,theta,angleInDegrees=True)
然后将图片内的像素点的直角坐标和极坐标建立一个一一对应的映射,这样就可以轻松对图片进行旋转扇形取模。下面的代码实现了直角坐标转换成极坐标,然后映射成极坐标下的像素点
#coding=utf-8
import numpy as np
import cv2
def img_polar_transform(input_img,center,r_range,theta_rangge=(0,360),r_step=0.5,theta_step=360.0/(180*8)):
minr,maxr=r_range
mintheta,maxtheta=theta_rangge
H=int((maxr-minr)/r_step+1)
W=int((maxtheta-mintheta)/theta_step+1)
output_img=125*np.ones((H,W),input_img.dtype)
x_center,y_center=center
#极坐标变换
r=np.linspace(minr,maxr,H)
r=np.tile(r,(W,1))
r=np.transpose(r)#矩阵的转置
theta=np.linspace(mintheta,maxtheta,W)
theta=np.tile(theta,(H,1))#在垂直方向重复H次,水平重复1次
x,y=cv2.polarToCart(r,theta,angleInDegrees=True)
#最邻近插值
for i in range(H):
for j in range(W):
px=int(round(x[i,j])+x_center)
py = int(round(y[i, j]) + y_center)
if ((px>=0 and px<=W-1) and (py>=0 and py<=H-1)):
output_img[i,j]=input_img[px,py]
return output_img
input_img = cv2.imread('timg.jpeg', cv2.CV_LOAD_IMAGE_GRAYSCALE)
h,w=input_img.shape[:2]
center=(int(h/2),int(w/2))
r_range=(0,300)
output_img=img_polar_transform(input_img,center,r_range)
cv2.imshow('img',input_img)
cv2.imshow('polar',output_img)
cv2.waitKey(0)
cv2.destroyAllWindows()原图(480x480)
极坐标转换后的图(230x1440) 沿着圆形逆时针旋转一周取模1440次,每一次取230个像素点

使用极坐标像素点还原图形

使用pyqt开发的简易页面
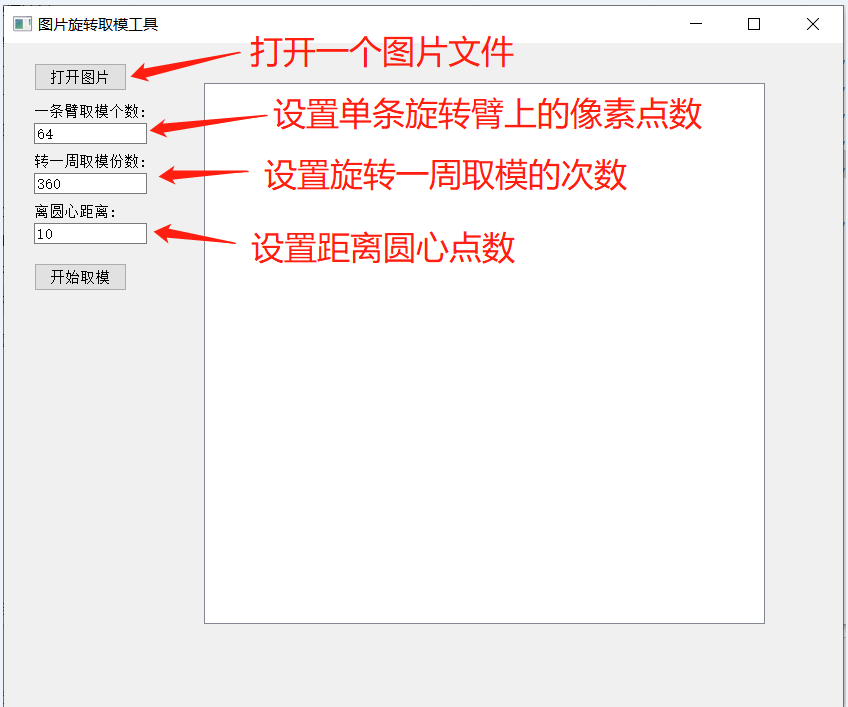
界面操作
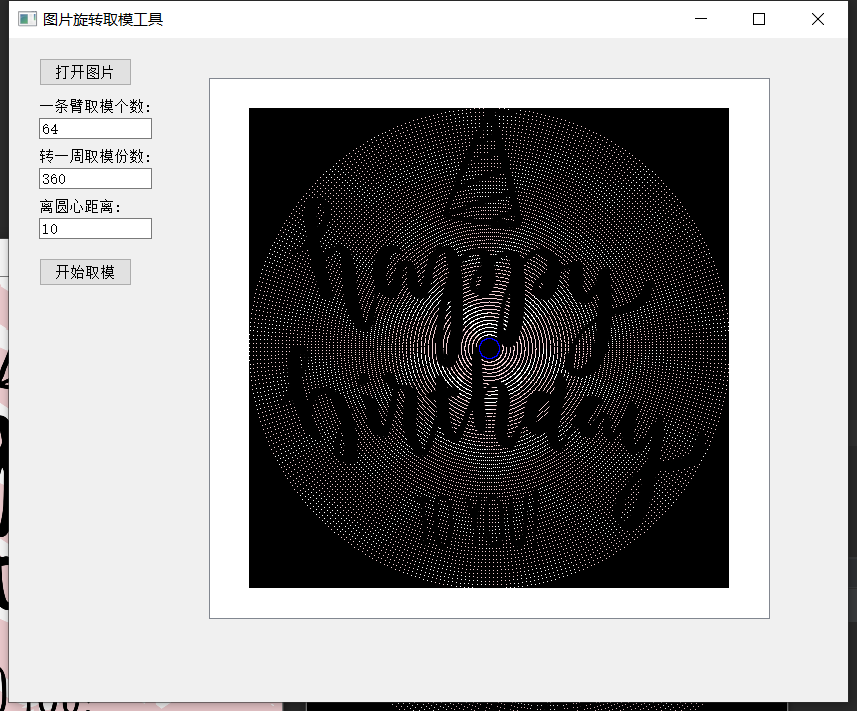
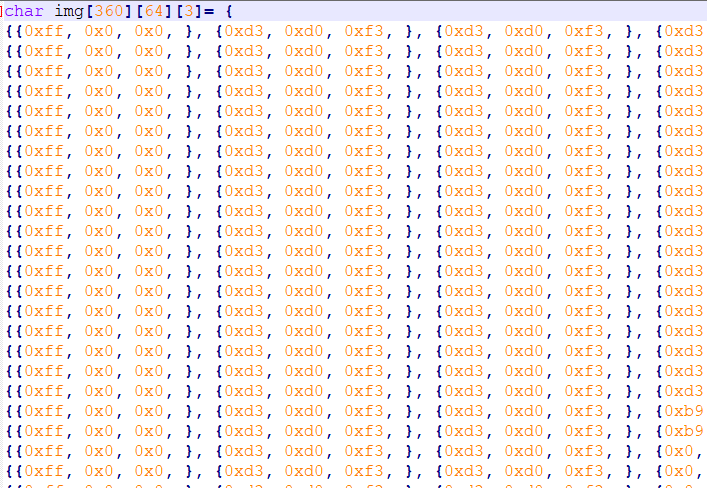
取模成功后会生成output.h文件,里面包含了极坐标下的像素点RGB数据。
demo工具已经上传到百度云,实现单张图片的取模,若需要更多功能,请联系qq:821254445
链接:https://pan.baidu.com/s/1cxjH-35uaOlieK3FC7XjXg
提取码:sbsk

有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐
 19
19 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)