联合概率数据关联(JPDA)应用举例
联合概率数据关联(JPDA)处理的两个例子
由于算法中一些参数细节描述的并不是很清晰,因此构造出场景来进行理解:
例1:
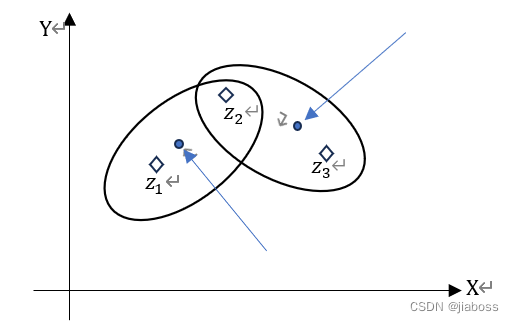
设有两个目标航迹,以这两个航迹的量测预测为中心建立波门,并设下一时刻扫描得到三个回波,这三个回波和相关波门的位置关系如下图所示,试写出其确认矩阵、关联矩阵,并求取量测与不同目标关联的概率![]() 。
。
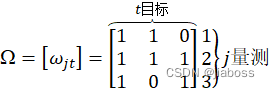
按照确认矩阵的构造方法,我们得到此时的确认矩阵为:
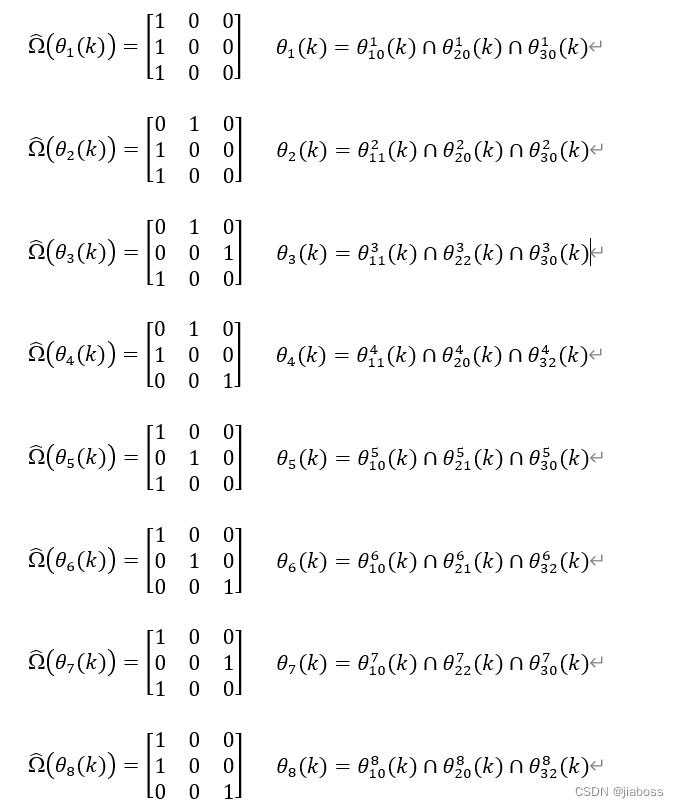
由确认矩阵按上述两条原则,可穷举搜索的8个关联矩阵及相应的联合事件为:
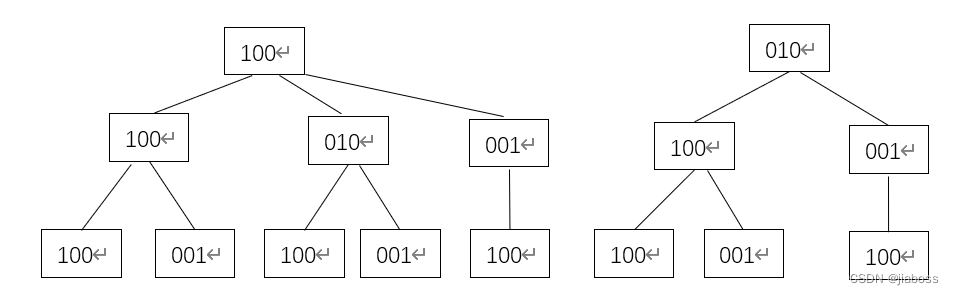
上述由确认矩阵得出关联矩阵的过程也可用如下图所示的框图来表示。按照确认矩阵的拆分准则可把上面的确认矩阵第一行拆分成以下两种情况:![]() 和
和![]() ,即第一个量测来源于假目标或者目标1;对于第二个量测(确认矩阵得第二行),在第一个量测来源于假目标情况下,其又可分为以下三种情况:
,即第一个量测来源于假目标或者目标1;对于第二个量测(确认矩阵得第二行),在第一个量测来源于假目标情况下,其又可分为以下三种情况:![]() ,
,![]() 与
与![]() ,即第二个量测来源于假目标、目标1、目标2;而在第一个量测来源于目标1得情况下,第二个量测得归属可分为两种情况:
,即第二个量测来源于假目标、目标1、目标2;而在第一个量测来源于目标1得情况下,第二个量测得归属可分为两种情况:![]() 与
与![]() ,即该量测来源于假目标和目标2,这里需要注意得是:在这种情况下由于第一个量测已经来源于目标1,因此,按照确认矩阵的拆分准则2,第二个量测不能再次属于第一个目标,所以没有
,即该量测来源于假目标和目标2,这里需要注意得是:在这种情况下由于第一个量测已经来源于目标1,因此,按照确认矩阵的拆分准则2,第二个量测不能再次属于第一个目标,所以没有![]() 这种情况。同理,在前两个量测来源于不同目标的情况下,对第三个量测(确认矩阵的第三行)的来源问题进行拆分,即可得到如图所示的框图。
这种情况。同理,在前两个量测来源于不同目标的情况下,对第三个量测(确认矩阵的第三行)的来源问题进行拆分,即可得到如图所示的框图。
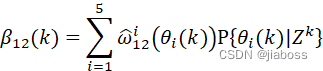
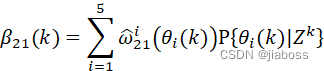
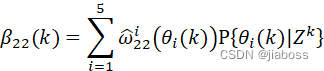
不同量测与不同目标关联的概率![]() 为(注:
为(注:![]() ;其中
;其中![]() 为
为![]() 时刻第
时刻第![]() 个联合事件
个联合事件![]() 的条件概率;
的条件概率;![]() 由确认矩阵拆分得到的第
由确认矩阵拆分得到的第![]() 个关联矩阵(对应第
个关联矩阵(对应第![]() 个联合事件)中的每一个元素,表示第
个联合事件)中的每一个元素,表示第![]() 个联合事件中量测
个联合事件中量测![]() 是否与目标
是否与目标![]() 关联。):
关联。):
同样地,各量测属于假目标的概率(![]() )可表示为
)可表示为![]() ,
,![]() ,
,![]() 。
。
例2:
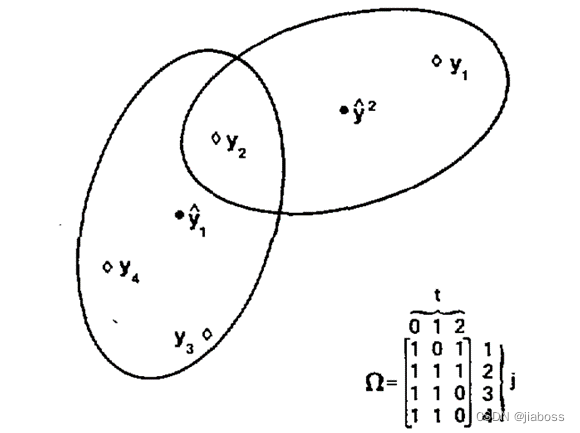
由图中可知:存在2个目标(航迹):![]() ;存在4个量测,
;存在4个量测,![]() 。
。
根据图中确认矩阵拆分,生成若干个关联矩阵,显然,![]() :
:
计算联合事件概率![]() ,假定杂波服从参数
,假定杂波服从参数![]() 的泊松分布,
的泊松分布,![]() 由下式获取:
由下式获取:

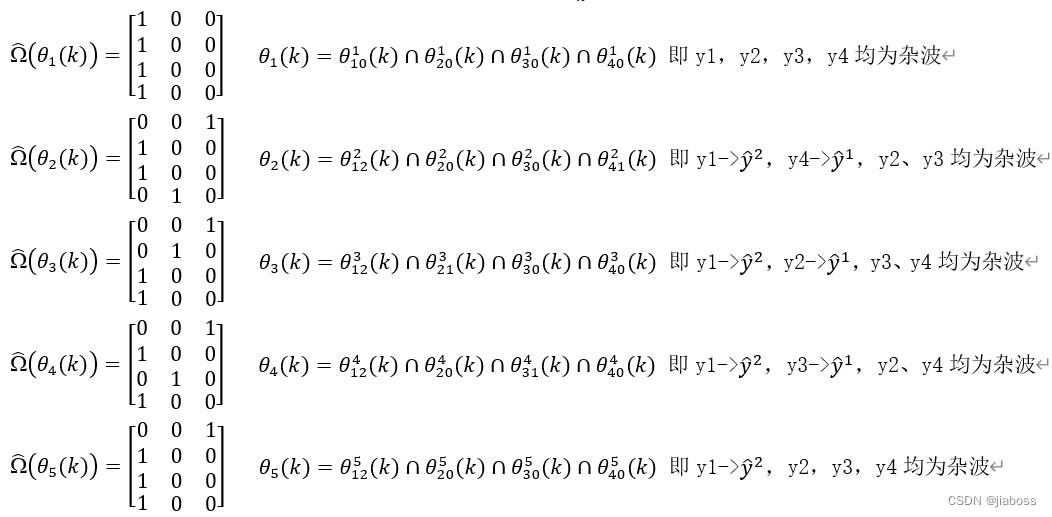
对于
![]() 即y1->
即y1->![]() ,y2->
,y2->![]() ,y3、y4均为杂波
,y3、y4均为杂波
根据
可知:![]() ,
,![]() ,
,![]() ,
,![]()
根据
可知:![]() ,
,![]()
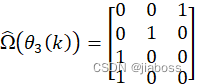
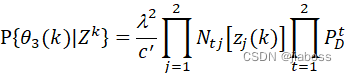
根据
可知:![]() ,表示在联合事件
,表示在联合事件![]() 中假量测的数量为2。
中假量测的数量为2。
根据

可得:


对于
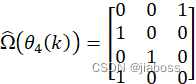
![]() 即y1->
即y1->![]() ,y3->
,y3->![]() ,y2、y4均为杂波
,y2、y4均为杂波
根据计算可知:
![]() ,
,![]() ,
,![]() ,
,![]()
![]() ,
,![]()
![]()
从而得到:

其他联合事件概率的计算略,直接给出结果:
![]()


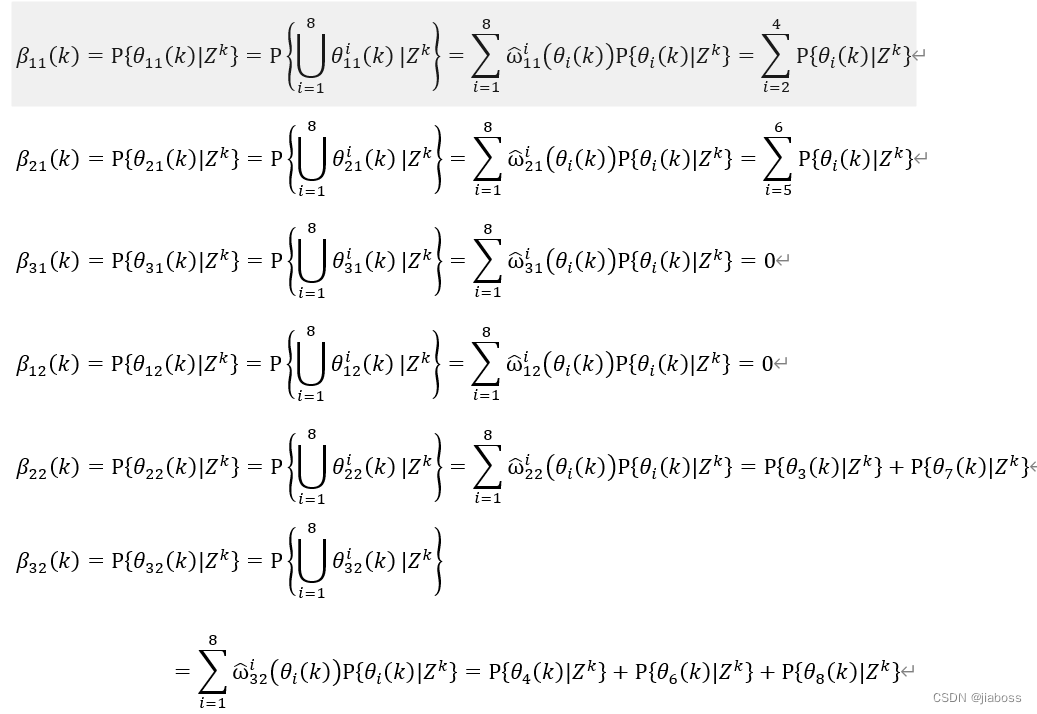
计算关联概率:
![]() ;
;

![]()
由于![]() ,
,![]() ,
,![]() ,
,![]() ,
,![]()
所以:![]()
由于![]() ,
,![]() ,
,![]() ,
,![]() ,
,![]()
所以:![]()
由于![]() ,
,![]() ,
,![]() ,
,![]() ,
,![]()
所以:![]()
由于![]() ,
,![]() ,
,![]() ,
,![]() ,
,![]()
所以:![]()
由于![]() ,
,![]() ,
,![]() ,
,![]() ,
,![]()
所以:![]()
由于![]() ,
,![]() ,
,![]() ,
,![]() ,
,![]()
所以:![]()
由于![]() ,
,![]() ,
,![]() ,
,![]() ,
,![]()
所以:![]()
由于![]() ,
,![]() ,
,![]() ,
,![]() ,
,![]()
所以:![]()
从而![]() ,
,![]() ,
,![]() ,
,![]() ,
,![]()
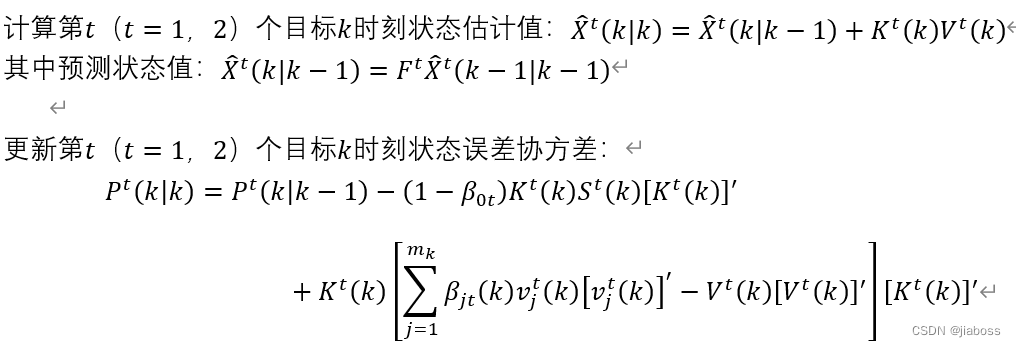
计算组合新息向量:
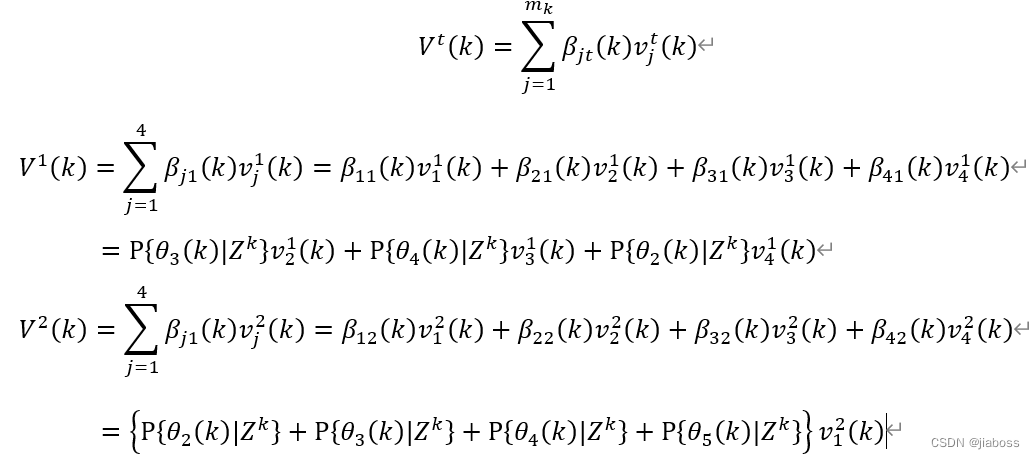
计算卡尔曼增益:![]() ,其中
,其中![]() 为第
为第![]() 个目标的新息协方差,
个目标的新息协方差,![]() 。
。

有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐
 5
5 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)