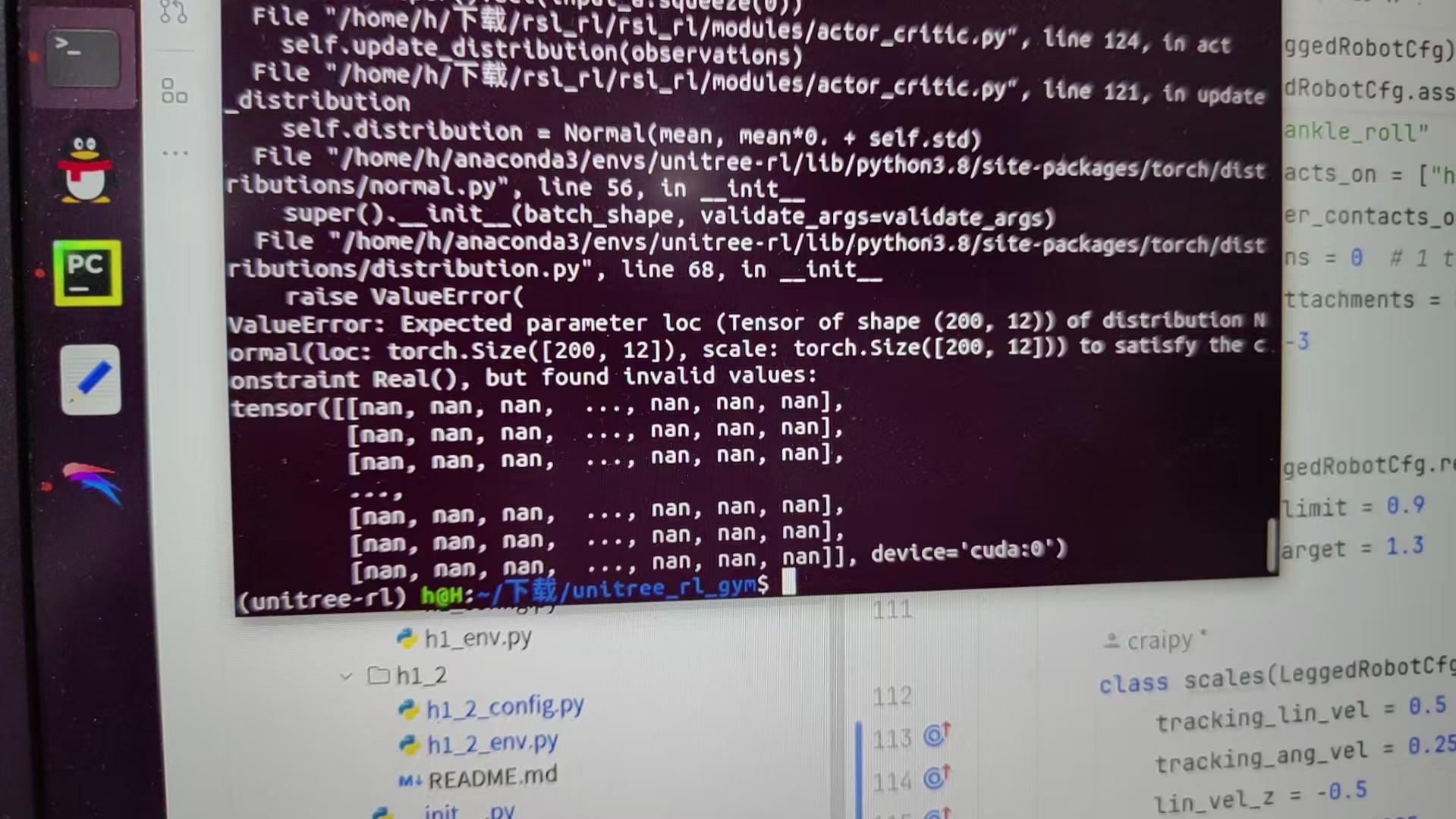
ValueError: Expected parameter loc (Tensor of shape (4096, 12)) of distribution Normal(loc: to
ISAAC GYM运行强化学习,显示很多nan
·
最近换自己的机器人去跑宇树的算法,结果遇到了这样的提示。然后及进行解决,
最开始是说学习率太高,然后我就将学习率降低——没有用
有一个朋友说检查状态空间,看是哪个数据没有,那就将数据打印出来
在envs文件中,找到状态空间的相关代码,添加打印
def compute_observations(self):
""" Computes observations
"""
print(f"Base angular velocity: {self.base_ang_vel}")
print(f"Projected gravity: {self.projected_gravity}")
print(f"Commands: {self.commands[:, :3]}")
print(f"DOF positions: {self.dof_pos}")
print(f"DOF velocities: {self.dof_vel}")
print(f"Actions: {self.actions}")
sin_phase = torch.sin(2 * np.pi * self.phase).unsqueeze(1)
cos_phase = torch.cos(2 * np.pi * self.phase).unsqueeze(1)
self.obs_buf = torch.cat((self.base_ang_vel * self.obs_scales.ang_vel,
self.projected_gravity,
self.commands[:, :3] * self.commands_scale,
(self.dof_pos - self.default_dof_pos) * self.obs_scales.dof_pos,
self.dof_vel * self.obs_scales.dof_vel,
self.actions,
sin_phase,
cos_phase
), dim=-1)
assert not torch.any(torch.isnan(self.obs_buf)), "NaN detected in observations!"
assert not torch.any(torch.isinf(self.obs_buf)), "Inf detected in observations!"
self.privileged_obs_buf = torch.cat((self.base_lin_vel * self.obs_scales.lin_vel,
self.base_ang_vel * self.obs_scales.ang_vel,
self.projected_gravity,
self.commands[:, :3] * self.commands_scale,
(self.dof_pos - self.default_dof_pos) * self.obs_scales.dof_pos,
self.dof_vel * self.obs_scales.dof_vel,
self.actions,
sin_phase,
cos_phase
), dim=-1)然后就可以打印各个数据,很好的查看办法。我从第一类开始,打印的是0,后面几乎都是nan。
再次向前溯源,我的第一个数据是self.base_ang_vel,那就再向前
def _init_foot(self):
self.feet_num = len(self.feet_indices)
rigid_body_state = self.gym.acquire_rigid_body_state_tensor(self.sim)
print(f"Rigid body state: {rigid_body_state}")
self.rigid_body_states = gymtorch.wrap_tensor(rigid_body_state)
print(f"Wrapped rigid body states: {self.rigid_body_states}")
self.rigid_body_states_view = self.rigid_body_states.view(self.num_envs, -1, 13)
self.feet_state = self.rigid_body_states_view[:, self.feet_indices, :]
self.feet_pos = self.feet_state[:, :, :3]
self.feet_vel = self.feet_state[:, :, 7:10] def update_feet_state(self):
self.gym.refresh_rigid_body_state_tensor(self.sim)
print(f"Updated rigid body state: {self.rigid_body_states}")
self.feet_state = self.rigid_body_states_view[:, self.feet_indices, :]
self.feet_pos = self.feet_state[:, :, :3]
self.feet_vel = self.feet_state[:, :, 7:10]继续打印数据,发现这里还是nan,就说明仿真平台就没有采到数据
我询问了万能的AI,他说看看URDF文件有没有问题,我就去寻找。对比之前的URDF文件,我发现,我把角速度设置成了0...
之后就是修改URDF文件
lower="-0.5"
upper="0.5"
effort="20"
velocity="12"再次尝试就好啦!

有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐


 2
2 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)