“语养天年”基于RDKX5的嵌入式助老系统
为了能让巡航机器人能够在室内自如行驶,我们选用基于cartographer算法的Slam建图算法,基于move_base的全局路径规划算法,和基于TEB算法的局部路径规划算法。为了能够方便调度底层控制板速度,灯光,蜂鸣器等任务,我们采用freertos.他很方便方便地实现任务切换和调度,提高系统的响应速度和效率。我们预计构建基于yolov8pose的模型,并且部署到RDKX5的BPU上面,之前在任
“语养天年”基于RDKX5的嵌入式助老系统
摘要
随着全球老龄化问题日益严重,智慧养老系统成为解决老年人生活质量和家庭安全性的重要手段。本项目旨在利用AI技术搭建一个智能化嵌入式系统,来为老人提供一个一个智能化、舒适、安全的生活环境,特别针对独居老人的需求。
项目通过搭建搭载传感器的智能机器人,通过AI导航和视觉算法,检测室内安全隐患和环境数据。通过智能健康检测手环收集健康数据,并将上述数据传输到云平台上。搭建一个智能化的养老系统。
主要功能如下:
机器人在公寓内的运动控制
机器人的语音控制的研究:
底层运动控制算法的研究
研上层导航定位算法的研究
室内环境安全检测
传感器应用研究:采用传感器实时检测室内环境:
特征提取与检测:老人健康检测
设计健康检测手环,监测老年人的身体健康,内置多种传感器如心率传MAX30102(正在)、体温传感器MAX30205(完成)、陀螺仪MPU6050模块()。及时预警健康异常。OLED 屏幕IIC
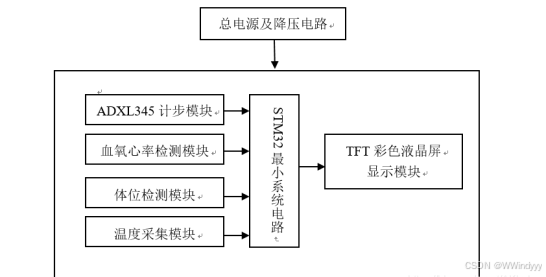
图1 健康监测手环功能框图
关键词:RDK X5,机器视觉,语音交互,AI大模型,嵌入式硬件。
功能设计与目前完成情况
控制与运动功能
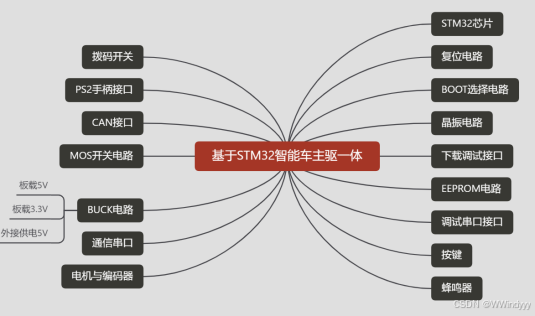
图6.硬件框架
我们基于上面需要的功能,设计了以STM32为基础的,底层控制板,如下所示:
- 原理图与PCB
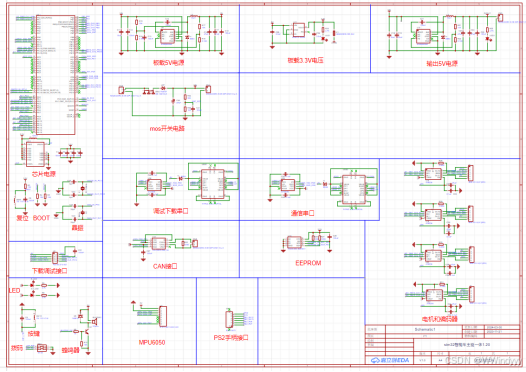
图9.基于STM32智能车主驱一体原理图
图9.基于STM32智能车主驱一体原理图
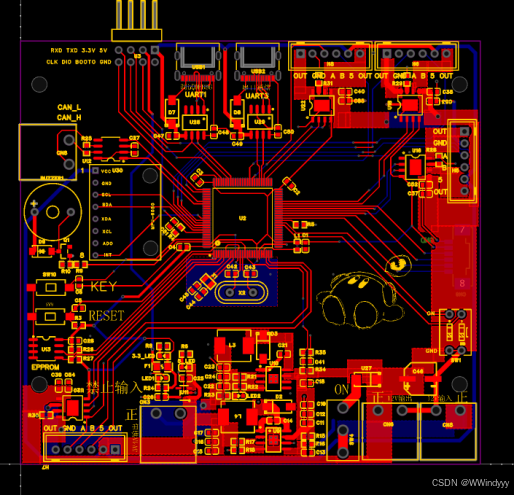
图10.基于STM32智能车主驱一体PCB图
- 硬件实物图
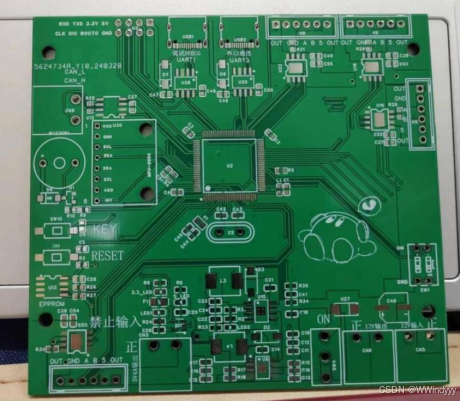
图11.基于STM32智能车主驱一体PCB实物图(未焊接)
图12.基于STM32智能车主驱一体PCB实物图(已焊接)
- 运动控制执行层代码的构建
为了能够方便调度底层控制板速度,灯光,蜂鸣器等任务,我们采用freertos.他很方便方便地实现任务切换和调度,提高系统的响应速度和效率。主要有下面几个任务,如下
导航与定位功能
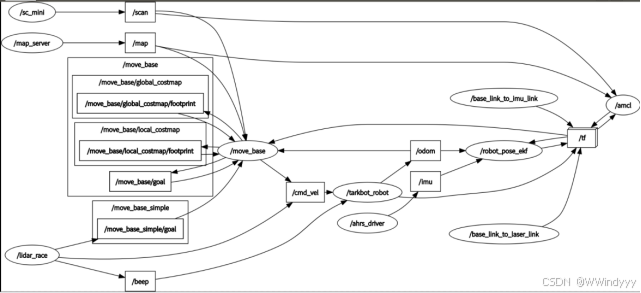
为了能让巡航机器人能够在室内自如行驶,我们选用基于cartographer算法的Slam建图算法,基于move_base的全局路径规划算法,和基于TEB算法的局部路径规划算法
具体导航搭建的过程,我们采用的是机器人开发社区给的方法,然后根据需求,搭建了我们的导航框架,如下所示: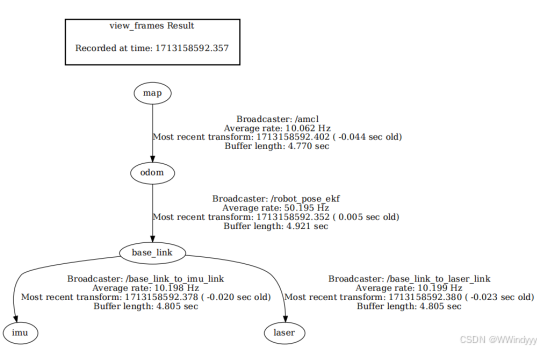
通过获取底盘IMU 和里程计的数据,结合激光雷达扫描到的信息,可以实现导航和定位。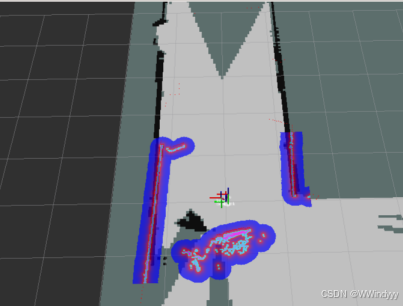
机器视觉
我们预计构建基于yolov8pose的模型,并且部署到RDKX5的BPU上面,之前在任务1中,已经实现了初步的CPU部署,经过学习,我们已经训练出了第一版模型
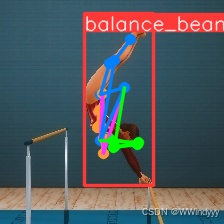
可以实现很好的检测
AI大模型集成与语音交互
暂时没有开始进行
手环的健康检测:
我们完成了没有UI界面设计的初版代码,并且构建出了系统板,并且经过上版测试是可实现的,后续会进行缩小然后3D打印成手环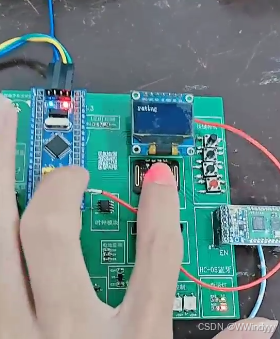
测试脉搏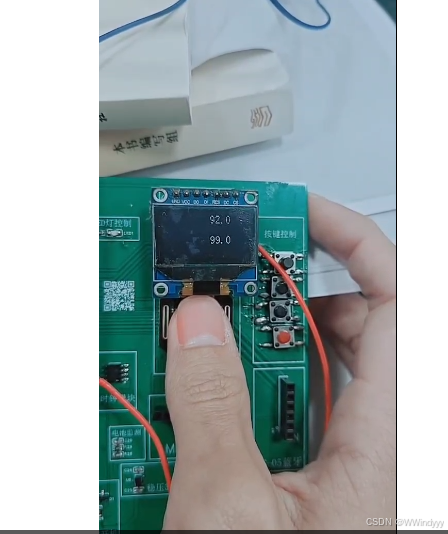
测试血氧

有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐

 6
6 0
0- 0



 已为社区贡献3条内容
已为社区贡献3条内容

所有评论(0)