11-3 FCW/AEB 设计依赖的 ISO 22839/15623 标准
本文主要介绍前向碰撞预警系统 FCW 设计依赖的两个标准:ISO 22839-2013 、 ISO 15623-2013。
第一部分 ISO 22839-2013
Intelligent transport systems - Forward vehicle collision mitigation systems - Operation, performance, and verification requirements
ISO 22839-2013 :智能交通系统 — 前向车辆碰撞缓解系统 FVCMS — 操作、性能和验证要求。
1. 介绍
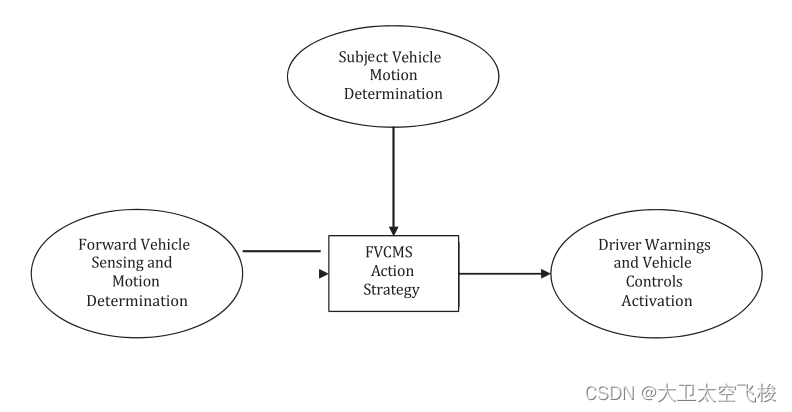
Forward Vehicle Collision Mitigation Systems (FVCMS) reduce the severity of forward vehicle collisions that cannot be avoided, and may reduce the likelihood of colision with forward vehicles. FVCMS require information about range to forward vehicles, motion of forward vehicles, motion of the subject vehicle, drive commands and driver actions. FVCMS detect vehicles ahead, determine if detected vehicles represent ahazardous condition, and warn the driver if a hazard exists. They estimate if the driver has an adequate opportunity to respond to the hazard. lf there is inadequate time available for the driver to respond, and if appropriate criteria are met, FVCMS determine that a collision is imminent. Based upon this assessment, the FVCMS will activate vehicle brakes to mitigate collision severity.
2. FVCMS 分类
本条款提供了介绍性信息,解释了本国际标准所涵盖的 FVCMS 的不同分类。本条款不是用来定义要求的。所有要求本标准出现在后面相应章节。
2.1 按曲线半径分类
根据曲线半径能力对系统进行分类:
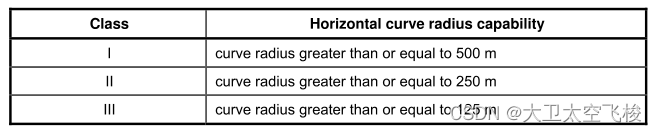
I 级系统应具有探测目标车辆轨迹中半径小于 500 米的前方障碍物车辆的能力
II 级系统应具有探测目标车辆轨迹上半径小于 250 米的前方障碍物车辆的能力
III 级系统应具有检测目标车辆轨迹上半径小于 125 米的前方障碍物车辆的能力
2.2 按应对策略分类
FVCMS 可以根据所提供的对策进行分类。分类是基于最低限度的对策和可能提供的额外对策。每个对策都有一个相关的最小对策实施点(MCAP)。当碰撞前紧急性参数(PUP)至少等于该对策的最小对策实施点时,FVCMS 激活该对策。
碰撞警告(CW)对策
碰撞警告是一种基于听觉、视觉和触觉或触觉感官模式的组合的警告,符合 ISO 15623 对 FVCMS操作范围的要求。碰撞警告对策应在 SRB 或 MB 启动之前发生。
减速制动(SRB)对策
减速制动是一种自动制动功能,旨在降低目标车辆的速度。SRB 为驾驶员提供了更好的机会来应用手动紧急制动,进行紧急变道,或确定不存在危险并解除 SRB。任何这些操作都可能阻止 MB 激活。为了帮助乘客为该制动事件做好准备,SRB 启动之前会有碰撞警告对策。如果 MB 处于激活状态,则不会启动 SRB。
缓解制动(MB)对策
缓解制动是指当碰撞看起来不可避免时施加的自动制动。如果PUP至少等于阈值 MCAPMB,则将启动 MB。缓解制动措施的激活将产生比 SV 和 TV 在没有任何缓解措施的情况下发生碰撞时破坏性更小的碰撞。在某些情况下,它还可能导致自动避免碰撞。MB启动之前将启动碰撞警告对策,并可选择启动 SRB。
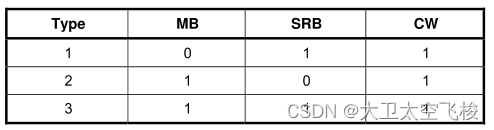
组合策略
FVCMS 的可能配置如下表2所示。每一行代表一个不同的系统类型。本表中未确定的任何组合不在本国际标准的范围内。对于每种类型,该行指示需要哪些对策。“1” 表示需要对策,“0” 表示不应包括对策。
3. 功能要求
3.1 最低启用能力
FVCMS 性能的定义要求主体车辆至少配备一种装置,用于实现每个必要的系统功能。所有FVCMS 应根据ISO 15623 为 FVCMS 的操作范围提供 CW 。
轻型车辆的必要功能
配备 FVCMS 的轻型车辆应能够实现以下功能:
-检测前方车辆的存在
-确定 SV 和检测到的前方车辆之间的距离和接近速度
-确定目标车辆速度
-当横向偏移小于 20% 时,启动适当的 FVCMS 对策,即使来自 SV 传感器的 TV 被部分遮挡
-根据 FVCWS 要求提供驾驶员警告
-激活和调节制动器,无论驾驶员是否已经在制动
-控制制动灯
-基于具有偏航稳定性能力和管理纵向车轮打滑能力的制动器,例如必要时结合 ABS 能力的 ESC 或 RSC 系统,增强驾驶员控制
-在 2 型和 3 型系统的 MB 事件期间至少产生所需的最小 FVCMS 减速度
-具有为 1 型或 3 型系统提供 SRB 制动轮廓的能力
-在 MB 或 SRB 启动后,允许驾驶员将减速度增加到任何更高的值,直到车辆可能的最大减速度
重型车辆的必要功能
配备 FVCMS 的重型车辆应实现与轻型车辆相同的功能,但增加了以下功能:
FVCMS 对策不应导致千斤顶断裂(在驾驶室和拖车形成 “V” 形之前,铰接车辆在驾驶室与拖车之间的连杆处折叠)。
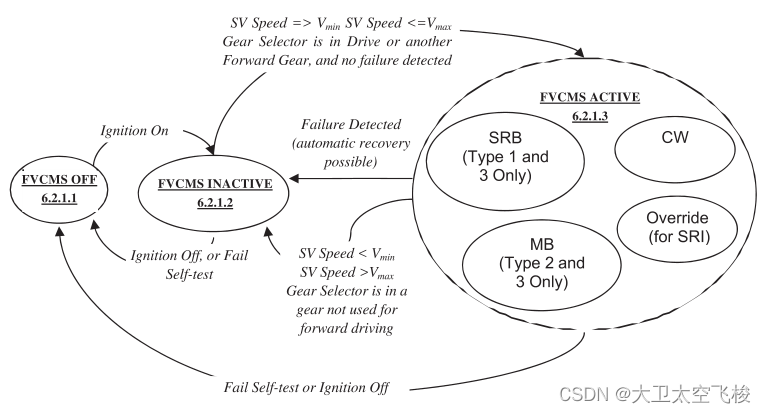
3.2 运行模型-状态转换图
FVCMS 应按照下图的状态转换图运行。除了以下所示之外,状态转换的具体实施留给制造商。
PS:章节有点变化,请参照原因为文档。
根据以上状态转换图,FVCMS 可以选择性地发挥作用。除了以下所示之外,状态转换的具体实施留给制造商。
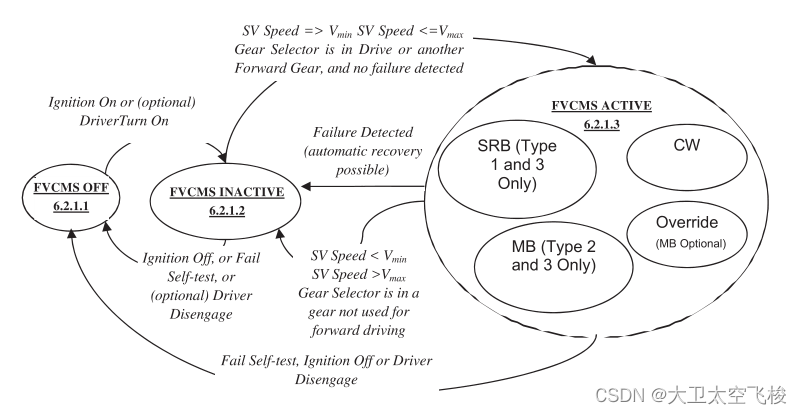
3.2.1 FVCMS 关闭
在 FVCMS 关闭状态下不执行任何对策。将点火开关转到关闭位置后,FVCMS 应转换到 FVCMS 关闭状态。当自检功能确定 FVCMS 无法提供足够的性能时,或者当驾驶员手动断开 FVCMS(可选)时,应转换到 FVCMS 关闭状态。当车辆打开时,FVCMS 可能处于 FVCMS 关闭状态
3.2.2 FVCMS 未激活
在 FVCMS 非激活状态下,FVCMS应监测车速和档位状态,并确定是否适合激活系统。如果点火循环已完成且发动机正在运行,则 FVCMS 应从 FVCMS 关闭状态进入 FVCMS 非激活状态。如果不满足激活条件,FVCMS 应从激活状态进入该状态。例如,如果车速降至 Vmin 以下,则选择倒车档或选择驻车档。根据诊断自检的结果,可以恢复所有或部分对策的功能。如果遇到制造商定义的故障模式,可以自动恢复(可选),则 FVCMS 应从 FVCMS 活动状态转换为 FVCMS 非活动状态。一旦恢复发生,系统可以转换回 FVCMS 活动状态。最后,如果驾驶员手动启用 FVCMS (可选),则应从 FVCMS 关闭状态转换为 FVCMS 非活动状态。
3.2.3 FVCMS 激活
FVCMS 在激活时应监测触发条件,从而选择适当的对策,并决定激活或选择性地超控对策。如果发生系统故障或无法执行对策,如果可以从故障中自动恢复,则 FVCMS 应转移到 FVCMS 非活动状态。如果系统自检失败(不可能在没有驾驶员干预的情况下自动恢复),FVCMS 应转换到FVCMS 关闭状态。将这些故障通知给驾驶员的方式由制造商决定。如果档位选择处于驱动或任何向前运动选择,且车速大于或等于 Vmin 且小于 Vmax,则 FVCMS 应进入该状态。
3.3 性能要求
3.3.1 目标车辆
FVCMS 应根据检测到的拟在公共道路上使用的可获得许可的机动车辆,即摩托车、轿车、轻型卡车、公交车、客车和其他重型车辆,在需要时提供对策措施车辆。FVCMS 可以选择性地检测较小的目标,例如行人和人力自行车。
3.3.2 碰撞类型
FVCMS 应在所有目标车辆的追尾碰撞场景中发挥作用。
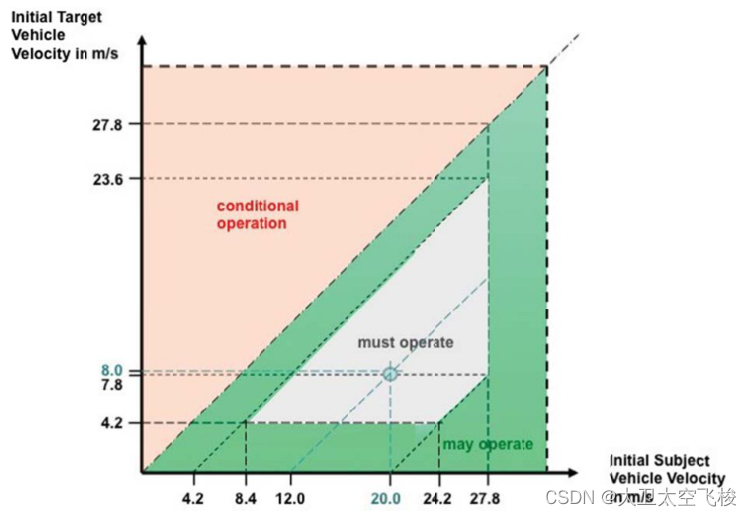
3.3.3 运行速度
运行速度和相对速度限制如下图所示。粉红色区域(斜线上方的阴影区域)表示有条件的运行条件;绿色区域(斜线下方的阴影区域)为可运行区域;并且颜色为灰色的区域是必须操作的条件。主体车辆和目标车辆的最大运行速度上限留给制造商。
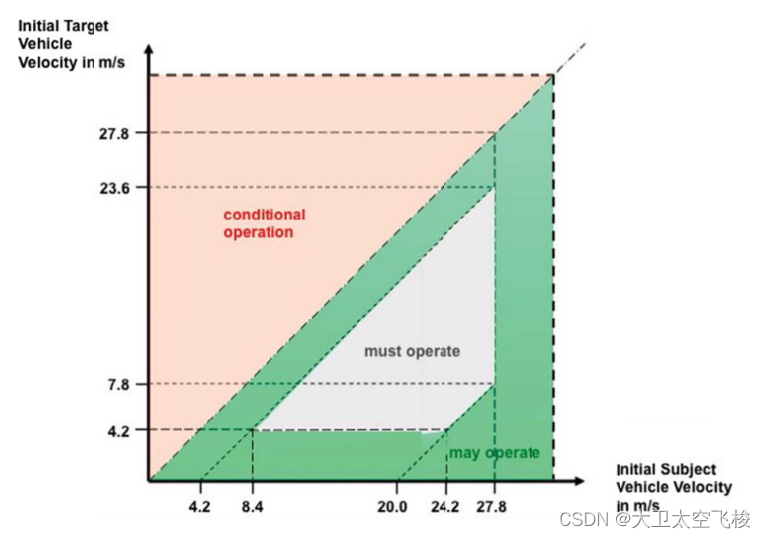
主体车辆-最低目标车速:
1.所有 FVCMS 的 Vmin 应小于等于 8.4 m/s(30 km/h)。
2.如果目标车速降至 Vmin 以下且缓解制动未进行,则 FVCMS 应进入非激活状态。Vmin的值应在车主手册中声明。
主体车辆-最大目标车速:
所有 FVCMS 的 Vmax 应为 27.8 m/s(100 km/h)或更高,如果低于 27.8 m/s,则应为最大车速。
如果Vmax的值小于汽车的速度能力,则应在车主手册中说明。
目标车辆-最低目标车速:
1.对于任何目标车速,最小目标车速不得大于 4.2 m/s。
2.初始 FVCMS 检测的最小目标车速应由SV制造商确定。
3.FVCMS 应适用于检测范围限制内的任何目标车速,并在目标车速降至 0 m/s 时保持功能
目标车辆-最大目标车速:
1.FVCMS 应适用于以 Vmax 减去最小相对速度的任何速度移动的目标车辆,该速度与上图所示FVCMS 的运行范围一致。
目标车辆-最大横向偏移:
1.当任一方向的横向偏移为 20% 或更低时,FVCMS 应起作用。制造商可自行决定,FVCMS 可用于大于 20% 的横向偏移。
目标车辆-最大横向速度:
1.当存在横向偏移时,FVCMS 应适用于小于 0.2 m/s 的相对车辆横向速度。FVCMS 可在制造商决定的大于 0.2 m/s 的相对车辆横向速度下运行。
相对速度:
1.当 SV 接近 TV 且相对速度 vr(t)在 −4.2 m/s(−15 km/h)和 −20 m/s(−72 km/h)之间时,FVCMS 应在任何相对速度条件下工作。制造商可以自行决定将操作区域扩展到这些限制之外。
2.如果由于目标车辆的减速,要求的减速度超过 MB 的最小要求减速度,则允许目标车辆在上的条件操作区内应用 SRB 或 MB。如果 ETTC 小于 4 s,则允许系统在条件操作区域中应用 SRB。
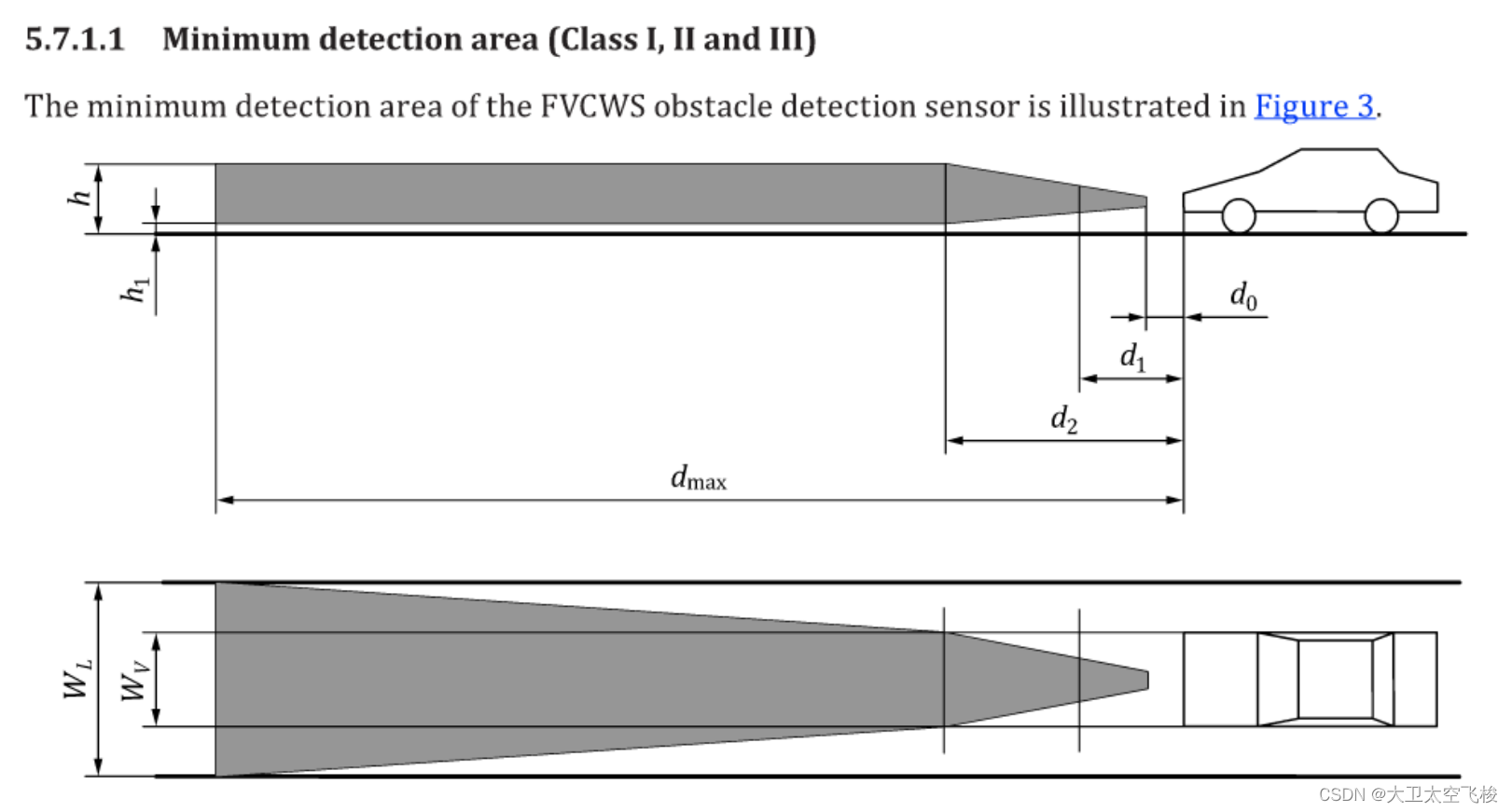
3.3.4 目标车辆检测区域
FVCMS 应在 SV 处于激活状态时监测SV前方的区域。传感器类型和安装位置由制造商决定。根据ISO 15623,水平曲线半径检测范围的宽度应相对于曲线半径进行扩展。
最小检测区域
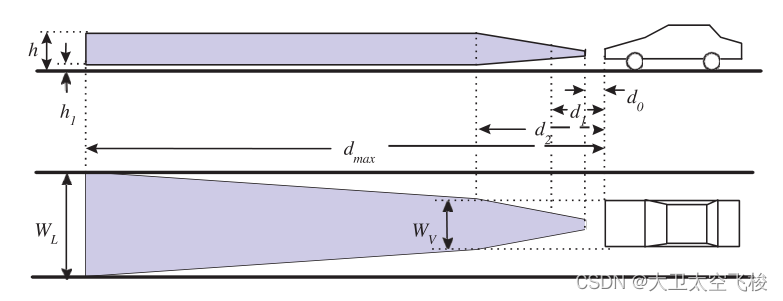
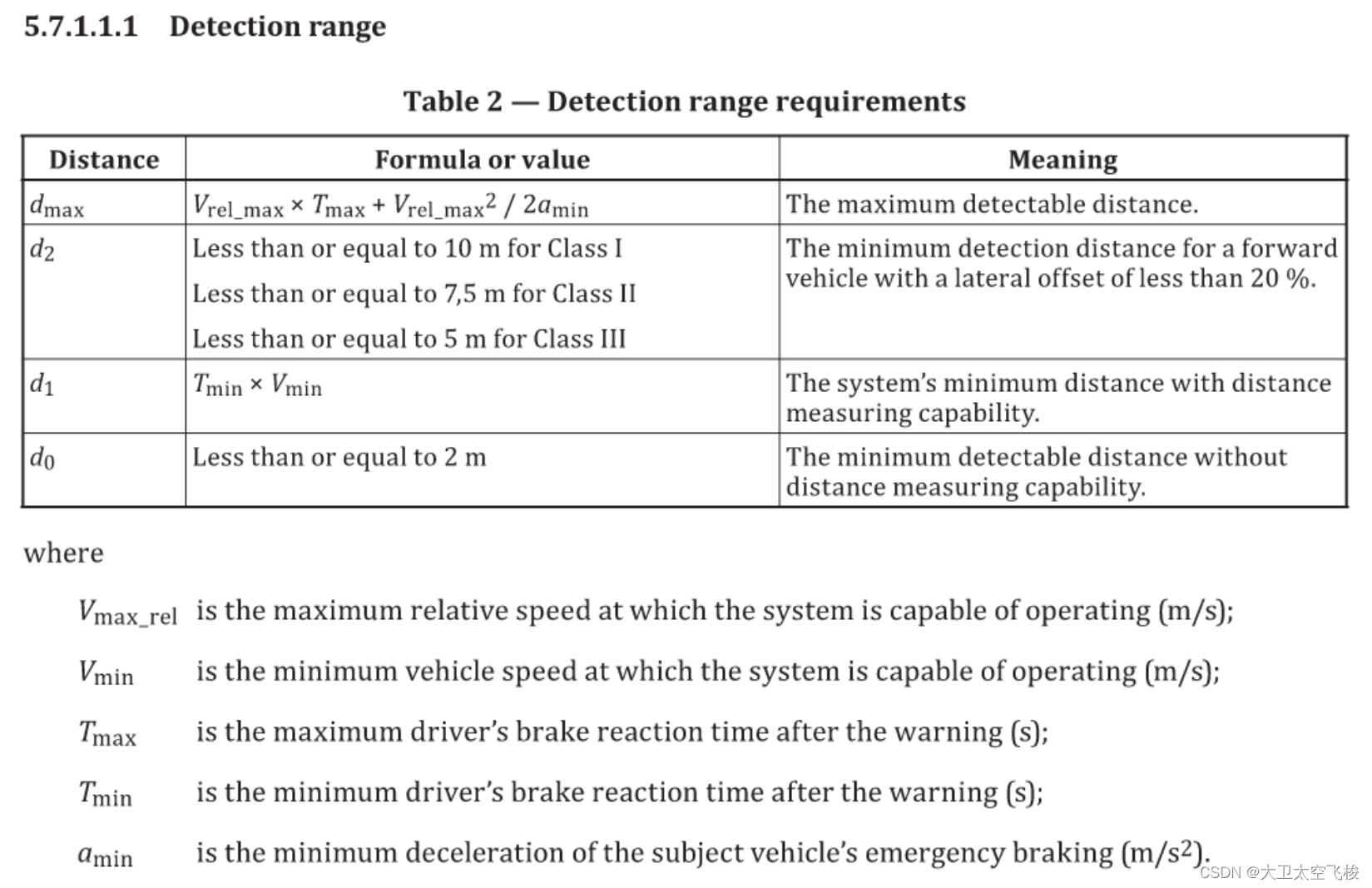
检测范围
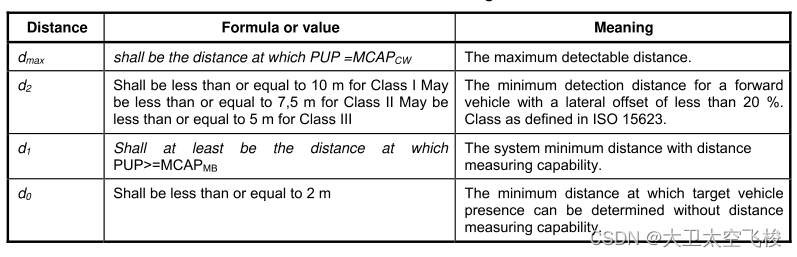
其中 MCAPcw 和 MCAPmb 是实际系统的设计参数,这些参数的值由车辆制造商确定。
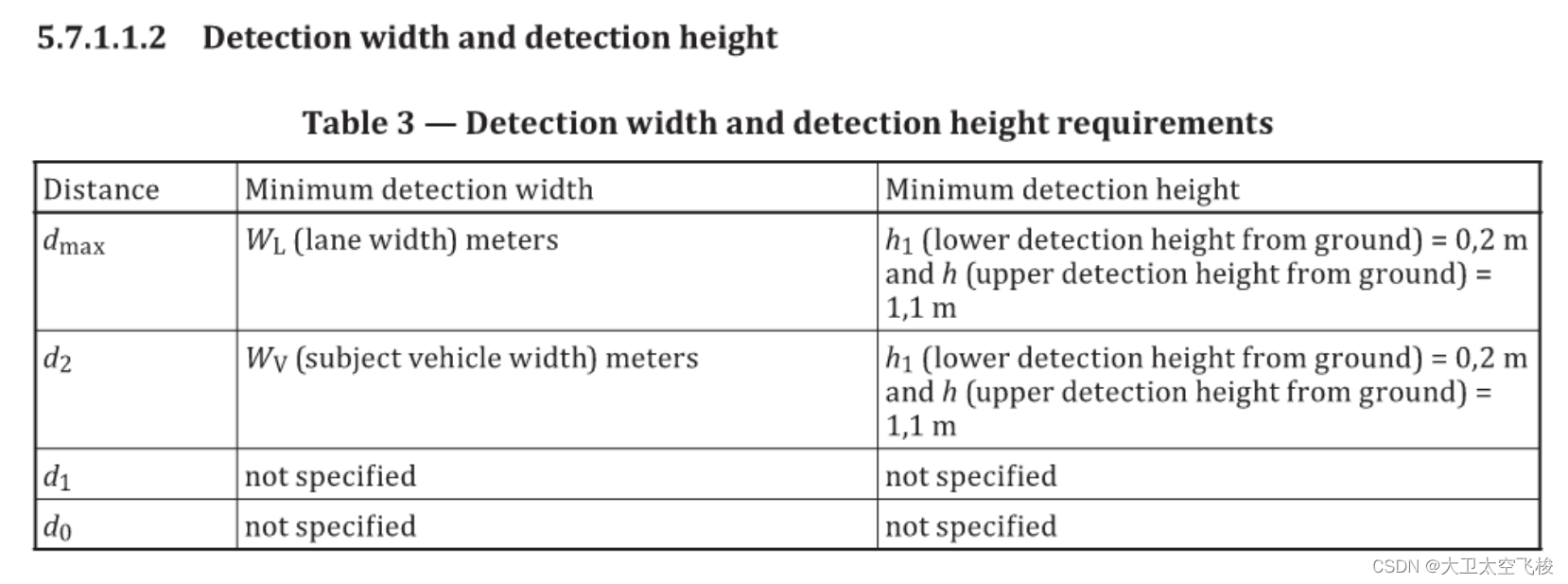
检测宽度和检测高度
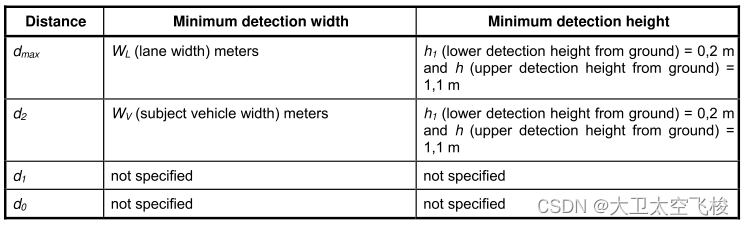
3.3.5 目标识别
纵向识别
如果检测到两辆或多辆前方车辆,则 FVCMS 应以 PUP 值表示最大碰撞概率的车辆为基础采取应对措施。
横向识别
如果一辆前方车辆位于主体车辆路径中,且前方相邻车辆存在,则系统应将警告和缓解制动建立在主体车辆路径上的车辆上。
上空识别
FVCMS 不得基于检测到高于道路 4.5 m 高度的头顶目标而启动 MB、SRB或 CW 对抗措施。
3.3.6 对策要求
MB 或 SRB 的提供
所有 FVCMS 应提供 MB 或 SRB。
CW 的提供
所有 FVCMS 应提供 CW。
制动灯控制
如果 FVCMS 应用自动行车制动,则制动灯应点亮。FVCMS 启动自动行车制动器后,制动灯应在350ms 内点亮。为了防止刺激性制动灯闪烁,在 FVCMS 启动的制动结束后,制动灯可以保持亮起一段合理的时间。
缓解制动要求
以下要求代表 FVCMS 操作所定义的最低功能。制造商可自行决定是否超过此最低功能。
缓解制动的启动
轻型车辆:TTC 或 ETTC 在 3.0 s 以上时不得启动 MB
重型车辆:TTC 或 ETTC 在 4.0 s 以上时不得启动 MB
缓解制动的最小减速度
轻型车辆:FVCMS 应在选择的持续时间内产生至少 5.0 m/s2(0.51g)的减速度,以实现至少 2.0 m/s 的减速。MB 和 SRB 组合的 FVCMS(类型3)应产生至少 4.0 m/s 的最小减速。该要求并不限制缓解制动启动的时间
重型车辆:FVCMS 应在选择的持续时间内产生至少 3.3 m/s2(0.34 g)的减速度,以实现至少 1.0 m/s 的减速。该要求并不限制缓解制动启动的时间
驾驶员指令加强缓解制动
除非 SV 已经在其最大能力下制动,否则 FVCMS 应允许驾驶员启动制动力的增加
缓解制动的终止
如果 PUP 小于 MCAPmb,则 FVCMS 可停用缓解制动。如果这样的停用被完成,PUP 随 SV 和 TV 的相对位置或路径速度的变化而快速变化,则制造商可以防止颤动,例如通过在停用控制中引入滞后
驾驶员启动的缓解制动超控
FVCMS 可选择性地允许驾驶员以制造商规定的方式通过驾驶员动作来超越缓解制动。在 MB 已激活且驱动程序已覆盖后,MB 可能会在驱动程序覆盖结束后再次激活
牵引力降低时的制动
缓解制动不会导致车轮抱死的时间超过防抱死或稳定控制装置(ABS/RSC)允许的时间
减速制动
以下要求代表 FVCMS 操作所定义的最低功能。制造商可自行决定是否超过此最低功能
启动 SRB
TTC 或 ETTC 在 4.0s 以上不得启动 SRB。激活点应由制造商决定
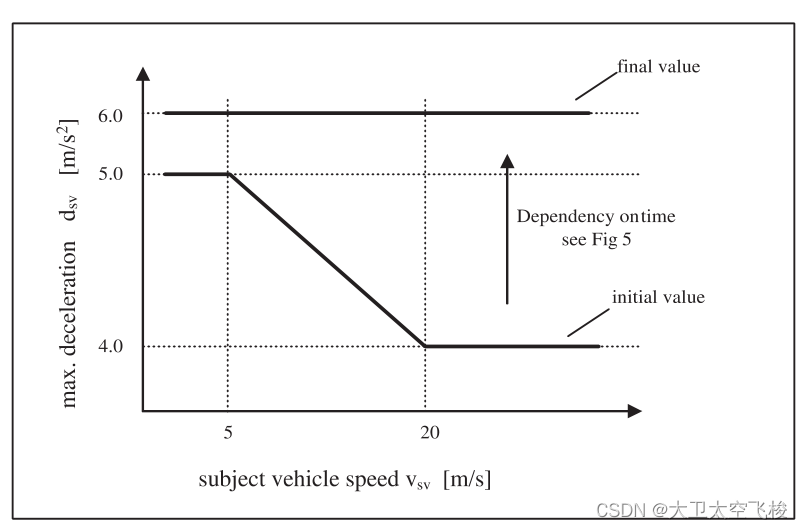
SRB 中的最大减速度
SRB 在激活时产生的平均减速度不得超过线 dSV=5,33 m/s2-0067/s*vSV(在第一时间段T_1_SRB sec 内平均),任何 SV 速度在 5,0 m/s 和 20 m/s 之间;其中 dSV 是 SV 的减速度,vSV 是 SV 的速度,dSV=-aSV
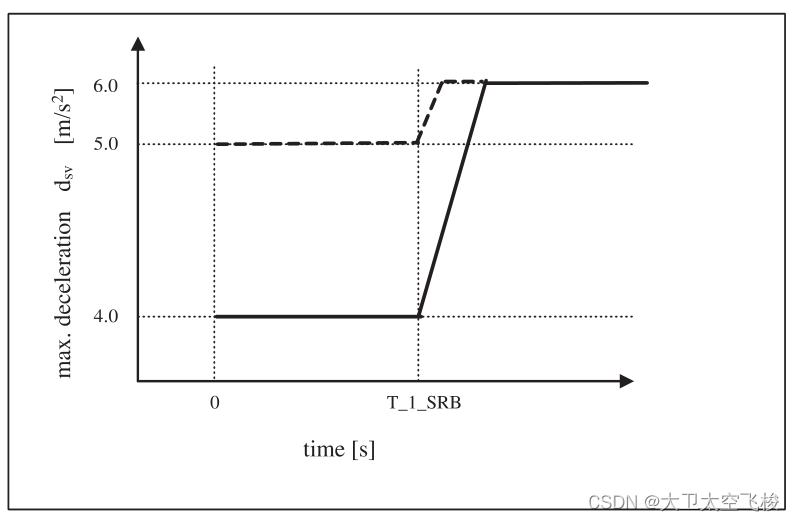
在 SRB 的第一个时间段 T_1_SRB内,当 vSV>20 m/s 时,SRB 产生的平均减速度不应超过 4,0 m/s2(在第一个时间周期T_1_SRB-sec内平均),当 vSV<5 m/s 时,不应超过 5 m/s2(如图6所示)
在至少 T_1_SRB 的时间段之后,SRB 的最大允许减速度可以连续增加到 6m/s2(在 1 秒内平均)。对于类型 3 和类型 1:T_1_SRB>=0.5 秒
在增加最大减速度的同时,SRB 过程中获得的平均急动度不得超过 6.0 m/s3(0.5 s 以上的平均值)
SRB的最低有效性
仅限 SRB( 1 型)系统的最低减速程度应与MB功能的最低要求相同
牵引力降低的 SRB
SRB 导致车轮抱死的时间不得超过防抱死或稳定控制装置(ABS/RSC)允许的时间
驾驶员启动的减速制动超控
FVCMS 应允许驾驶员以制造商规定的方式通过驾驶员的动作来超越减速制动
碰撞警告
碰撞警告应包括基于听觉、视觉和触觉或触觉感官模式的某种组合的对策,符合 ISO 15623。
3.3.7 驾驶员控制和人机界面
系统限制信息
轻型车辆:应至少通过车主手册或同等替代方案告知驾驶员 FVCMS 的操作限制
重型车辆:应至少通过车主手册告知驾驶员 FVCMS 的操作限制
FVCMS 的解除
轻型车辆:可以为驾驶员提供解除 FVCMS 的装置。对于能够手动从 FVCMS 活动状态和/或 FVCMS 非活动状态转换到 FVCMS 关闭状态的系统,驾驶员应能够轻松确定系统状态。
重型车辆:可以为驾驶员提供解除 FVCMS 的装置。对于能够手动从 FVCMS 活动状态和/或FVCMS 非活动状态转换到 FVCMS 关闭状态的系统,驾驶员应能够轻松确定系统状态。
FVCMS 故障指示
轻型车辆:应向驾驶员提供系统故障指示
重型车辆:应向驾驶员提供系统故障指示
目标车辆检测信息
轻型车辆:无
重型车辆:如果没有另外提供,则 FVCMS 可以在检测到目标车辆时向驾驶员指示。这种增加的早期驾驶员信息可能有助于避免重型车辆驾驶员经历的长时间制动延迟和停车距离
4. 测试方法
4.1 测试目标规范
略
4.2 环境条件
略
4.3 检测区测试方法
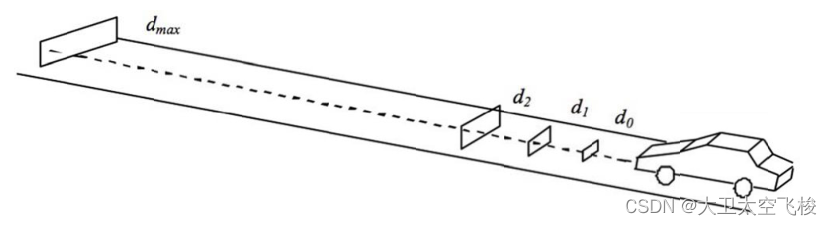
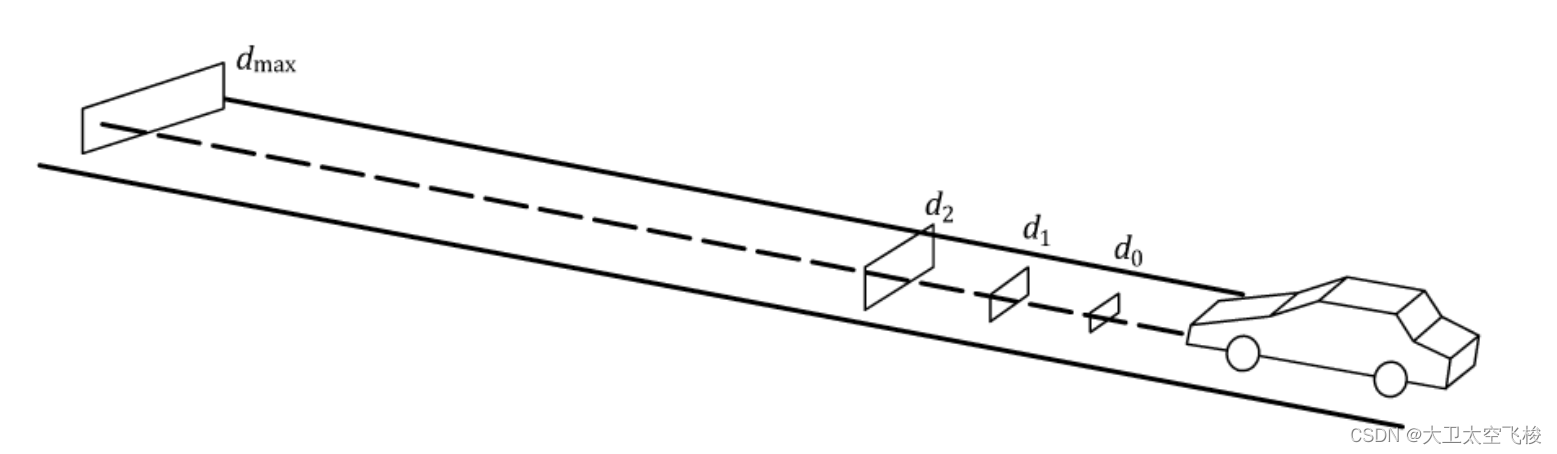
检测区域最现实的测试是动态测试,然而,静态测试也是一种选择。试验应按如下方式进行。系统应检测位于 d0 和 d1 之间任意距离处的测试目标,如图8所示。
系统应检测位于 d1 和 d2 之间任意距离处的测试目标,如图8所示。系统应检测依次位于距离 d2和 dmax 处的测试目标,如下图所示。
如果在没有专用测量设备的情况下无法验证检测,例如当传感器和 ECU 紧密集成时,制造商可以使用专用测量设备进行此测试,并提供测试结果以供检查。此外,由于本试验允许进行动态试验,因此可以与第4 条中的另一项试验同时进行,以便在执行另一项测试时实现本试验方法的目的。例如,满足先前定义的测试目标规范的测试车辆可以用作测试目标。在本测试中定义的不同距离处成功启动碰撞警告可被视为成功检测。
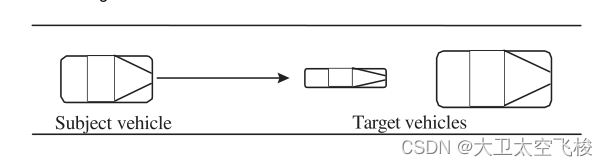
4.4 功能性能测试方法
试验可使用标准反射器代替目标车辆。功能能力测试包括一个测试场景,目标车辆的测试速度为20±2 m/s,目标车辆为 8±1 m/s,使其标称相对速度为 −12 m/s。主体车辆从远处接近目标车辆。当系统发出碰撞警告并在碰撞发生前达到所需的减速(以及 2 型和 3 型所需的减速度,满足缓解制动中的最小减速度)时,即可完成测试。

4.5 目标识别能力测试方法
这些试验应在车辆运动的情况下进行。当 SV 发出碰撞警告时,本款中每个测试的操作顺序就完成了。测试还应显示避免滋扰警告的能力。如果没有产生警告,则在完成所需的操纵后,测试即告完成。根据制造商的决定,这些测试可以扩展到评估系统的 SRB 或 MB 功能。这些测试中的每一项都可以在功能性能测试中规定的 SV 和 TV 速度下进行。
4.5.1 纵向识别试验
探测区域内的两辆目标车辆均以 20m/s 的速度行驶。目标车辆以 20m/s 的速度跟随两辆目标车辆。两辆目标车辆之间的时间间隔应为 0.6 s±0.1 s,并且两辆目标车沿一条线定位,使得近目标车辆不会遮挡远目标车辆。主体车辆和近目标车辆之间的时间间隔可能超过 1.5 s。主体车辆靠近目标车辆,直到系统发出碰撞警告。之后,目标车辆减速,直到达到相同的时间间隔(例如 ≥1.5 秒),然后再次以相同的速度跟随目标车辆。接下来,几秒钟后,只有接近目标的车辆减速到足够低的速度,以使目标车辆产生碰撞警告。当主体车辆发出碰撞警告时,测试结束。
如果警告的触发点符合单独考虑的近目标车辆的功能触发阈值,则通过测试。
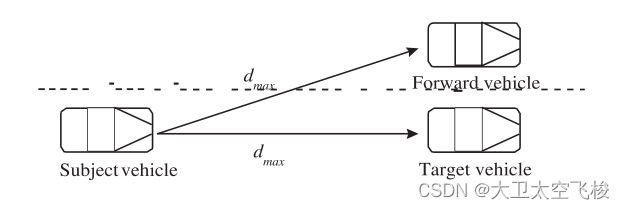
4.5.2 直道横向识别试验
试验应动态进行。主体车辆和目标车辆以相同的速度行驶,即 20 m/s,并且以不会引起警告的时间间隔行驶。主体车辆和目标车辆之间的时间间隔可能超过 1.5 s。前方车辆以与目标车辆相同的速度在目标车辆旁边行驶。前方车辆纵向中心线之间的间距为 3,5 m±0,25 m。前方车辆的宽度应在 1,4m 和 2.0m 之间。目标车辆和目标车辆的横向偏移应小于 20%。几秒钟后,前方车辆减速至明显低于主体车辆和目标车辆的速度的速度。在通过前方车辆的过程中,受试车辆既不应产生警告,也不应产生缓解制动。接下来,几秒钟后,目标车辆减速到足够低的速度,以使目标车辆产生碰撞警告。当受试车辆发出碰撞警告时,测试结束
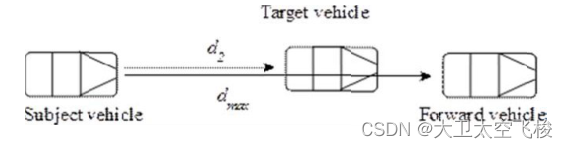
4.5.3 直道横向偏移识别试验
试验应动态进行。主体车辆和前方车辆以相同的速度行驶,即 20m/s,并且时间间隔不会引起警告。主体车辆和目标车辆之间的时间间隔可能超过 1.5s。主体车辆以与目标车辆和前方车辆相同的速度在前方车辆后方行驶,距离目标车辆大于 d2。目标车辆和前方车辆的宽度应在 1.4m 和 2.0 m 之间。目标车辆和后方车辆的横向偏移应小于 20%。SV 和目标车辆的横向偏移应在 15% 和20% 之间。几秒钟后,目标车辆减速至足够低的速度,使主体车辆产生碰撞警告。当主体车辆发出碰撞警告时,测试结束。
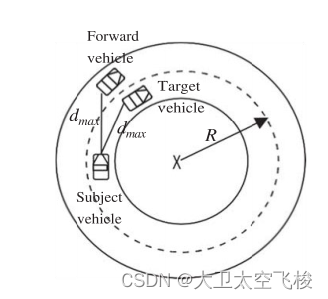
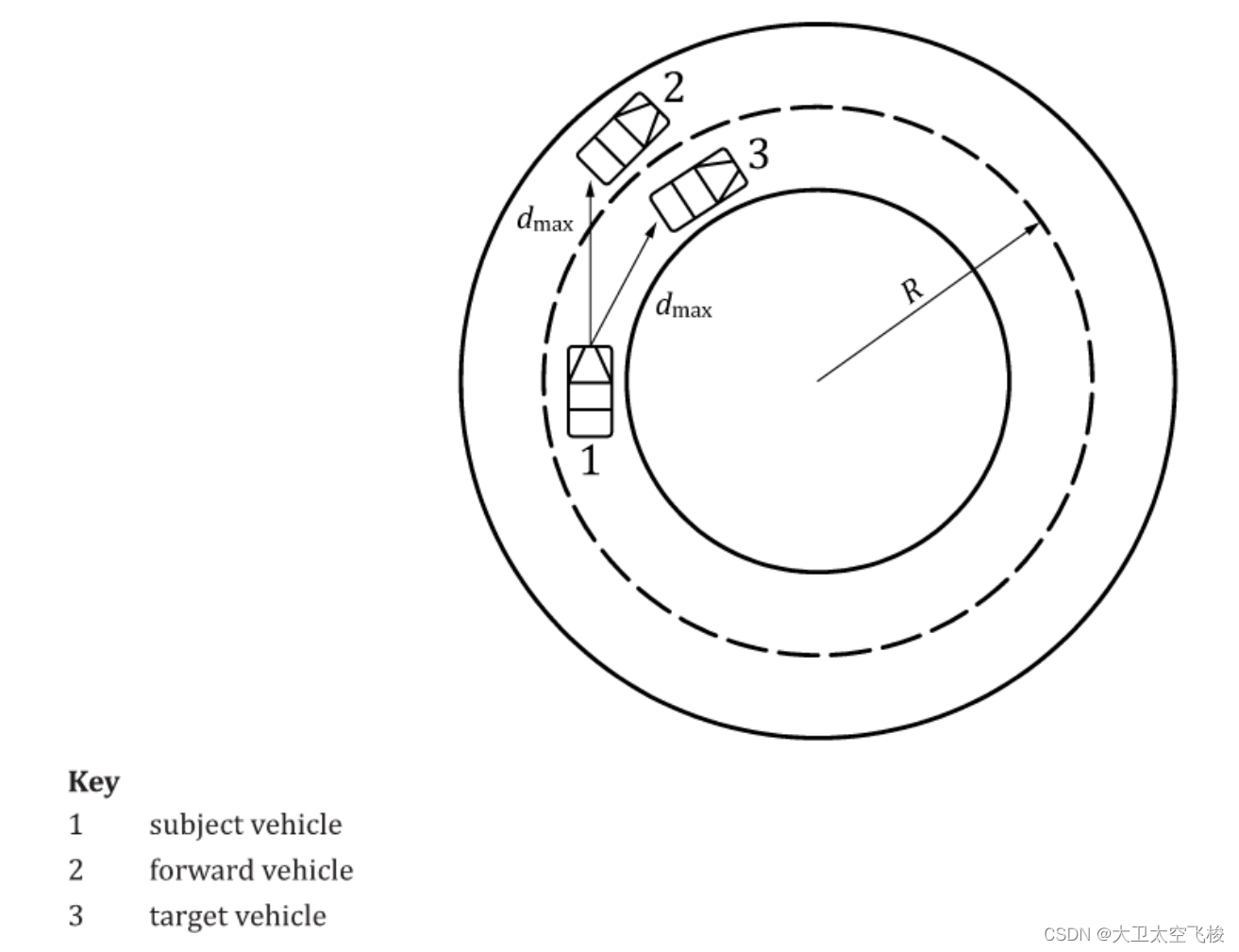
4.5.4 弯道横向目标识别试验
除了直线道路试验外,以下试验应在一个圆或圆的足够部分上进行,对于一级系统,最大半径为500m,对于二级系统,最小半径为 250m,对于三级系统,其最大半径为 125m。试验应动态进行。主体车辆和目标车辆在同一车道上以相同的速度行驶,且车头时距不会引起警告。试验开始时试验车辆的速度如下:
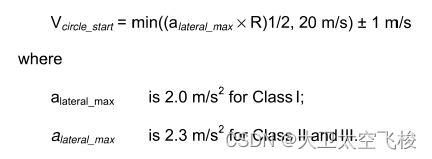
前方车辆在外侧车道上行驶在目标车辆旁边。几秒钟后,前方车辆减速至明显低于主体车辆和目标车辆的速度的速度。在通过前方车辆时,主体车辆既不应发出警告,也不应启动缓解制动。目标车辆继续减速,以便在几秒钟后其速度足够低,使主体车辆产生碰撞警告。当主体车辆发出碰撞警告时,测试结束。
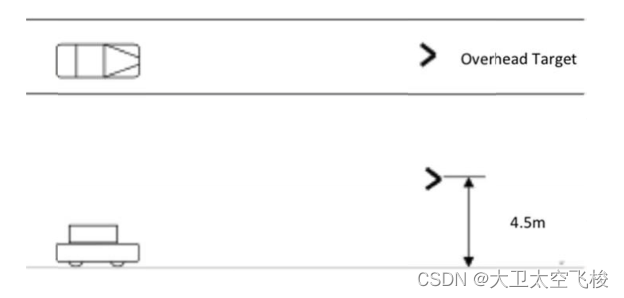
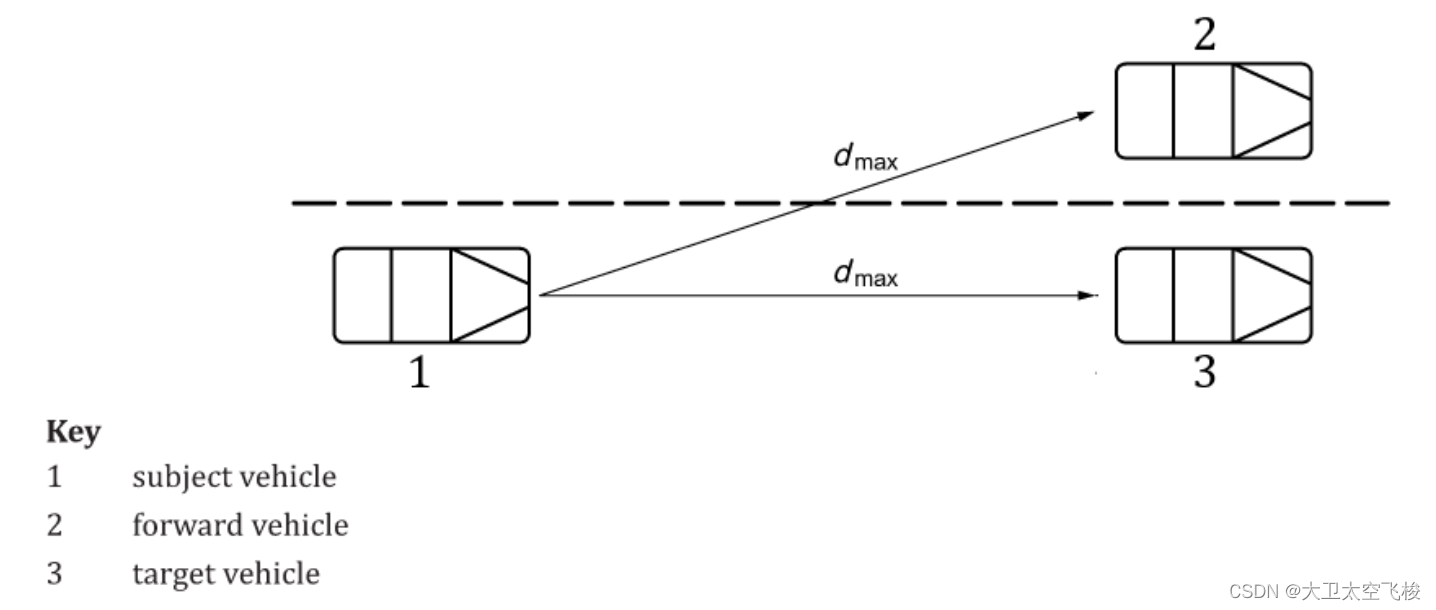
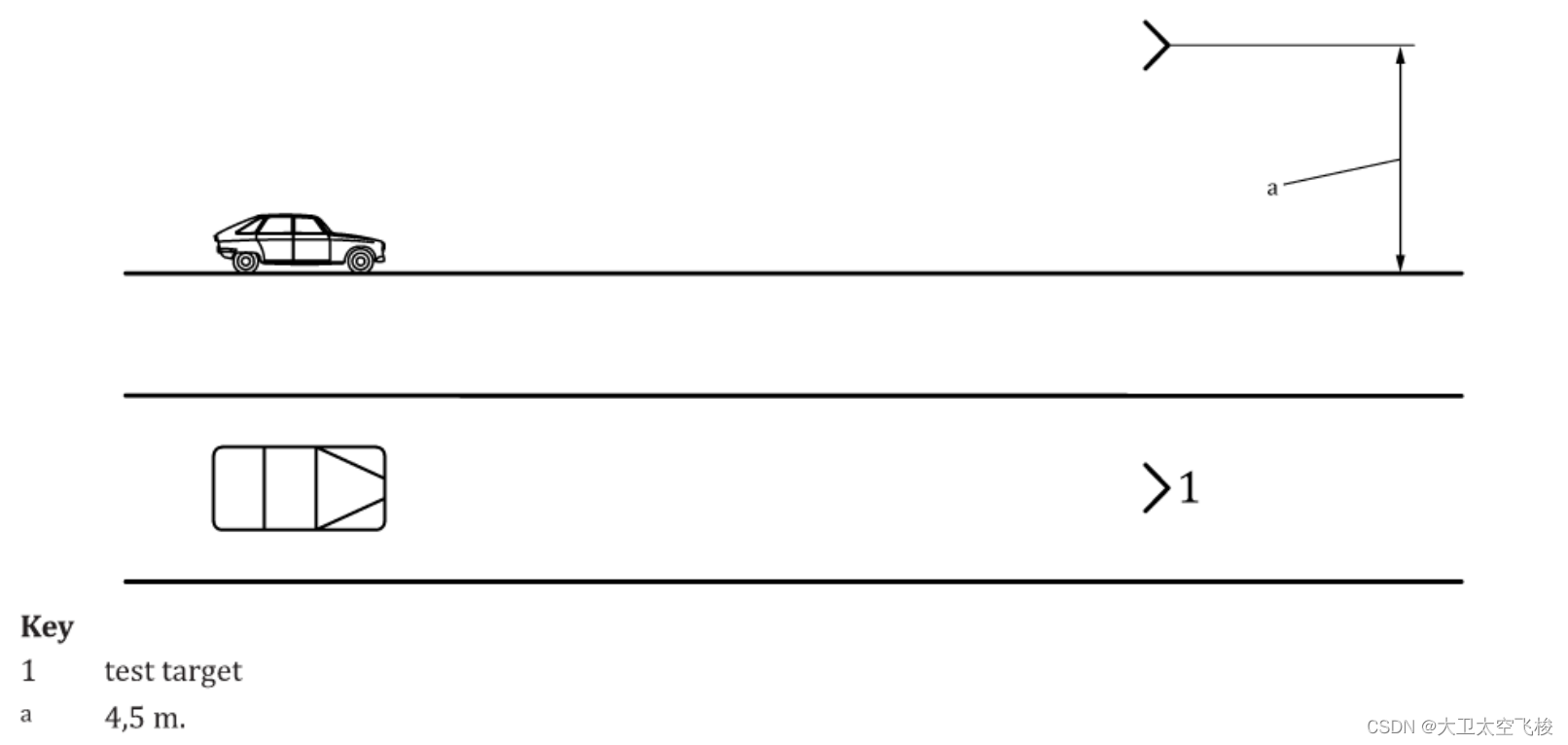
4.5.5 头顶识别测试
试验应动态进行。如图所示,可能导致误操作的头顶目标安装在道路上方 4.5 米处,距离大于dmax。主体车辆接近头顶目标。当主体车辆在没有产生任何警告或制动的情况下通过头顶目标下方时,试验结束。
以上内容主要摘录:
法规标准-ISO 22839标准解读(2013版)-CSDN博客
www.doc88.com-ISO 22839 English Version
第二部分 ISO 15623 - 2013
Intelligent transport systems - Forward vehicle collision warning systems - Performance requirements and test procedures
智能交通系统 — 前方车辆碰撞警告系统 — 性能要求和试验验程序
1. 介绍
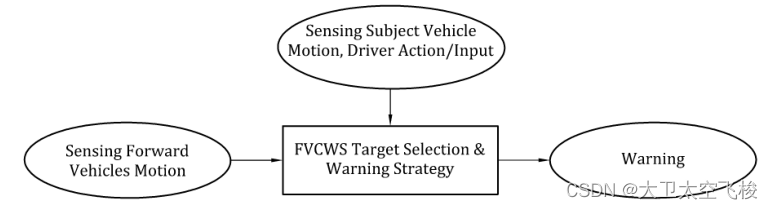
The main system function of FVCW is to warn the driver when the subject vehicle encounters the situation of a forward vehicle in the subject vehicle’s trajectory become a potential hazard. This is done by using information such as: (1) The range to forward vehicles (2) The relative velocity of the forward vehicles with respect to subject vehicle (3) Whether a forward vehicle in the subject vehicle trajectory. Based upon the information acquired, the controller identified as “FVCWS target selection and warning strategy” in produces the waring to the driver.
Automobile manufacturers and component suppliers throughout the world have been vigorously pursuing the development and commercialisation of the FVCWS systems. Systems of this type have already been introduced on to the market in some countries. Thus the standardization efforts began in 1994 amongst interested countries. This International Standard is composed to address only the basic performance requirements and test procedures for the FVCWS type systems which have more features and may extend beyond this International Standard.
2. ISO 15623 规范和需求
2.1 系统功能
FVCWS 的目的是提供警告,帮助司机避免或减少后端碰撞的严重程度。应该及时提供这些警告,以帮助驾驶员只通过刹车来避免最 常见的后端碰撞。应该选择警报的时间,以便尽早提供警报,以帮助驾驶员避免碰撞或减轻紧急引起的危害,而不会引入其他被视为滋扰或错误的警报。FVCWS 仅提供警告,不执行车辆控制以减轻事故。当主体车辆正在被车辆中的其他系统的自动制动命令应用(例如全速范围 ACC)时,FVCWS 可能不同地操作。在这种情况下,FVCWS 可以考虑自动制动系统的能力。实际上车辆持续自动制动可能会影响警告标准和警告模式。
2.2 必须功能
配备 FVCWS 的车辆应配备以下功能。
检测前方车辆的存在;
确定措施或检测到的前方车辆相对于主体车辆的相对位置和位置动态的措施;
确定主体车辆车速;
估算目标车辆的路径(Ⅱ 类和 Ⅲ类);
根据 FVCWS 功能和要求提供驾驶员警告。
2.3 操作模式
下图显示了 FVCWS 的状态转换图。
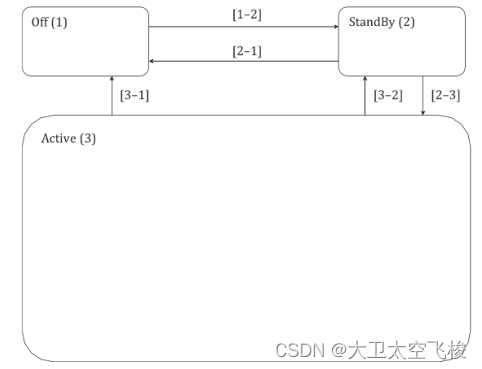
发动机运转,或发动机运转和开关上(如果有开关存在)
[1-2] engine running, or engine running and on switch (if on switch exists) 发动机运转,或发动机运转和开关上(如果有开关存在)
[2-1] ignition off or off switch or fault condition
[3-1] ignition off or off switch or fault condition 点火开关或故障状态
[2-3] 𝑉𝑚𝑖𝑛 ≤ speed ≤ 𝑉𝑚ax and gear is not in reverse or park positions 𝑉𝑚𝑖𝑛 ≤速度 ≤ 𝑉𝑚ax齿轮不在倒档或停车位置
[3-2] 𝑉𝑚𝑖𝑛 >speed or speed>𝑉𝑚ax or gear is in reverse or park positions 𝑉𝑚𝑖𝑛>速度或速度> 𝑉𝑚ax 或齿轮在倒档或停车位置
2.3.1 状态功能描述
FVCWS 状态描述处理 FVCWS 的功能内容,识别在每个状态下执行的功能。 对应于功能要求的说明以粗体文字显示。
FVCWS off (1) 关闭
在 FVCWS 关闭状态下不执行警告。除了点火钥匙(例如:开/关开关),提供将 FVCWS 置于此状态的手段是驱动器选择是可选的。 在将点火转到关闭位置时,FVCWS 转换到 FVCWS 关闭状态。每当自检功能确定 FVCWS 不能提供足够的性能,故障状态被设定,并 且 FVCWS 转换到 FVCWS 关闭状态。
FVCWS standby (2) 待机
在 FVCWS 待机状态下不执行警告。在这个状态下,FVCWS 监视车速和档位。如果车速在FVCWS 运行范围内和档位选择处于前进的 位置(除倒档和驻车档之外的所有档位),系统从待机状态转换到活动状态。如果点火循环已经完成并且发动机正在运转,或者如果 发动机正在运行并且可选的开/关开关处于“开”位置,则 FVCWS 从关闭状态进入 FVCWS 待机状态。FVCWS 从激活状态进 入此状态,如果不满足激活条件 :如果车速值超出 FVCWS 运行范围(增加了滞后增量),倒档被选中,或停车被选中。
FVCWS active (3) 执行
只要满足警告条件,就会在此状态下执行警告。如果档位选择处于任何前进的位置且车速值处于 FVCWS 运行范围内,则 FVCWS 进 入此状态。
2.3.2 运行限制
𝑉𝑚𝑎𝑥 的至少最小值为 27.8𝑚/𝑠 和最大车辆运行速度。𝑉𝑟𝑒𝑙_𝑚𝑖𝑛 的最多为 4.2𝑚/𝑠。𝑉𝑟𝑒𝑙_𝑚𝑎𝑥 至少为 20𝑚/𝑠。
2.4 警告功能
前方车辆碰撞警报系统应为移动(包括“已被检测为移动传感器,现已停止”)障碍车辆提供警告。为固定(从未检测到以 4.2𝑚/absolute 以上的绝对速度移动)障碍车辆提供警告是可选的。FVCWS 警告按照以下功能提供。
2.4.1 监视障碍车辆和主体车辆之间的距离和相对速度
前方障碍物车辆由障碍物检测装置感测如光学(激光),无线电波雷达或图像处理系统。
2.4.2 判断碰撞时间
判断潜在碰撞时间的一种可能的方式是评估主体车速的结果,到障碍车辆的距离,主体车辆与障碍车辆之间的相对速度,潜在的主体和障碍物车辆的减速。当系统同时检测到多辆车时,如果作为障碍物的车辆没有采取行动,则应选择主体车辆可能首先碰撞的本车辆预期轨迹中的一个。
2.4.3 初步碰撞警告和碰撞警告
前方车辆碰撞预警系统应向驾驶员发出碰撞警告。初步碰撞警告是可选的。 初步碰撞警告的目的是通知司机存在潜在的前方碰撞危 险。在这种情况下,司机应该准备采取必要的行动,以避免潜在的后端碰撞。即使系统打算在碰撞警告之前提供此警告,可能发生快 速变化的情况导致碰撞警告正在发出而没有事先的碰撞警告的结果。碰撞警告的目的是通知驾驶员需要采取行动,以避免或减少可能 即将发生的后端碰撞的严重性。
警告包括视觉,听觉和/或触觉的独立或组合使用。 但是,在发生碰撞警告的情况下,应向司机提供视觉警告以及听觉和/或触觉警告。
根据主体与障碍物车辆之间的相对速度,主体车辆速度,车辆间距离,自由行驶(驾驶员的制动反应)时间以及潜在主体 和障碍物车辆的减速而发出警告。
当主体车辆正在靠近障碍车辆时,如果使用其他警告触发方法,则应根据关于要求的减速度阈值或他们的等值的标准来决定警告距离。
2.5 警告单元需求
2.5.1 输出
FVCWS 应向驾驶员提供碰撞警告。 初步碰撞警告给可选。
2.5.2 初步碰撞警告和碰撞警告
FVCWS 碰撞警告应包含视觉警告以及听觉和/或触觉。
FVCWS 初步碰撞警告应包含视觉或听觉或视觉和听觉方式的组合。补充触觉形式对于初步碰撞警告是可选的。
如果主驾驶员正在踩刹车,建议不要将警告制动模式用于碰撞警告。
警告制动模式可以用于当在主体车辆中应用自动制动时(即,当正在进行自动制动动作时)的碰撞警告和初步碰撞警告。
警告制动应该持续 1 秒以上。减速度小于 0.5g,最大速度减少为 2𝑚/𝑠。为了确保警告制动的有效性,应当履行最小持续时间为 100ms 的最小平均减速度为 0.1g。
听觉警告音应该被选择,这样能够容易地听到和区别于与前向威胁无关的警告(例如横向威胁警告)。
安全带预张紧器的驱动可用于 FVCWS 碰撞警告。
2.5.3 要求的减速度阈值
当所需的减速度超过阈值𝐴_𝑠𝑒𝑟 时,FVCWS 应发出碰撞警告。在干燥的道路和温暖的气候条件下,阈值 𝐴_𝑠𝑒𝑟 不得大于 0.68g(考虑响应时间值 5.5.4)。
FVCWS 为驾驶员提供警告时间调整必须至少有一个设置满足 5.5.3.1 中的减速度阈值 𝐴_𝑠𝑒𝑟 要求。
FVCWS 可以在较低的减速阈值下发出初步碰撞警告。
根据检测到的道路状况、环境和驾驶员状态条件、驾驶员行为和不同的驾驶场景,可以调整所需的碰撞减速阈值和预警。
当有自动制动器应用于主体车辆时,可以选择修改 𝐴_𝑠𝑒𝑟 使其超过主动自动制动系统(例如:ACC系统)的最大减速能力。
2.5.4 响应时间
驾驶员对警告的反应时间应包括在警告范围的计算中。 Tresp 值不得小于 0.8s。
FVCWS 为驾驶员提供警告时间调整必须至少有一个设置满足5.5.4.1中的 Tresp 要求的设置。
制动系统响应时间(Tb)可以包含在所需减速度的计算中。制动系统响应时间值的选择留给FVCWS 设计者。
如果主体车辆驾驶员正在施加制动,则驾驶员制动反应时间(Tresp)和制动系统响应时间(Tb)可以被设置为零。
当有自动制动器应用于主体车辆时,在计算所需减速度时,可以将驾驶员对警告[驾驶员制动反应时间(Tresp)的反应时间设定为零。
2.5.5 无警告需求
5.5.5.1节规定了 FVCWS 不得发出任何类型警告的情况。
5.5.5.2至5.5.5.7小节提供了 FVCWS 警告可能被抑制或延迟的例子。
如果目标车辆减速度大于或等于要求的减速度阈值,FVCWS 不应发出任何类型的警告。
对于下表中为每个等级定义的曲率半径的道路,FVCWS 不应该对不在本车辆车道上的前方车辆发出任何类型的警告。

建议 FVCWS 不会针对切入目标车辆前方的更快速前进车辆发出任何类型的警告。
如果目标车辆驾驶员正在施加制动,FVCWS 警告可能被抑制或延迟。
如果 TTC 大于 4.0s,FVCWS 警告可能被抑制或延迟。
如果检测到主体车辆正在执行车道变换或高动态操纵,或者检测到油门释放(主体车辆驾驶员通过施加油门超驰自动刹车) ,或者 ACC 正在最大制动, FVCWS 警告可能被抑制或延迟。
如果通过使用平均横向加速度值小于或等于 3.5 m/s*2 正常的转向机动可以避免前方碰撞, FVCWS 警告可能被抑制或延迟。
如果情况超出5.3.2中定义的操作限制范围,FVCWS 警告可能被抑制或延迟。
2.5.6 警告距离范围计算案例

2.5.7 等效的警告触发点
对于使用不同警告触发方式(如 TTC 或 ETTC)的其他系统,警告触发时间应符合5.5.3,5.5.4和5.5.5的要求。
2.6 系统分类
系统根据曲线半径能力分类,如上表所示。
Ⅰ 级系统应具备沿主体车辆行驶轨迹前方障碍车辆检测半径小于 500m 的曲线的能力。
Ⅱ 级系统应具备沿主体车辆行驶轨迹前方障碍车辆检测半径小于 250m 的曲线的能力。
Ⅲ 级系统应具备沿主体车辆行驶轨迹前方障碍车辆检测半径小于 125m 的曲线的能力。
2.7 障碍车辆探测区域和性能
2.7.1 障碍车辆探测区域
2.7.2 警告距离准确性
非自适应系统应在标称范围内最大(±2m或±15%)公差产生警告。为了防止系统性能出现可能的偏差,应该在相同的初始测试条件下执行这个要求的重复测试。自适应系统性能可能由于其性质而不能满足此要求。 自适应系统是其警告时间是不同参数的函数的系统,例如检测到的路况,环境和驾驶员状态条件,驾驶员行为以及不同驾驶场景。
2.7.3 目标歧视能力
纵向歧视
如果在距离主体车辆前端距离𝑑1 至dm𝑎𝑥 的检测范围内有两个或更多的前方车辆,则系统应选择离本车最近的车辆以及本车辆轨迹中的车辆作为 FVCWS 将运行。
延迟歧视
如果在目标车辆的轨迹或相邻位置有两个或更多的前方车辆,系统应选择主体车辆轨迹中的车辆作为 FVCWS 将要操作的目标车辆。
高架歧视
在道路上方 4.5 米以上的高空物体,如高架标志等,系统不得选择其中任何物体作为目标车辆。
2.8 FVCWS 在曲线上的性能
FVCWS 应能对直道上存在的道路障碍车辆及 Ⅰ 类曲率半径大于等于 500m,Ⅱ 类大于等于 250m 和 Ⅲ 类大于等于 125m 报警。
2.9 使用者安全需求
2.9.1 光学雷达
Shall satisfy the requirements for class Ⅰ lasers as defined in IEC 825-1.
2.9.2 无线电波雷达
规范应以未来无线电波雷达专家可能建立的国际标准为基础。
2.10 人机接口需求
2.10.1 警告输出规范
所有视觉,听觉和触觉警告都应由司机察觉。建议视觉和听觉警告满足下表所示的适当人为因素。表4中的内容就是一个例子。 5.5.2中显示了碰撞和预警的警报模态要求。
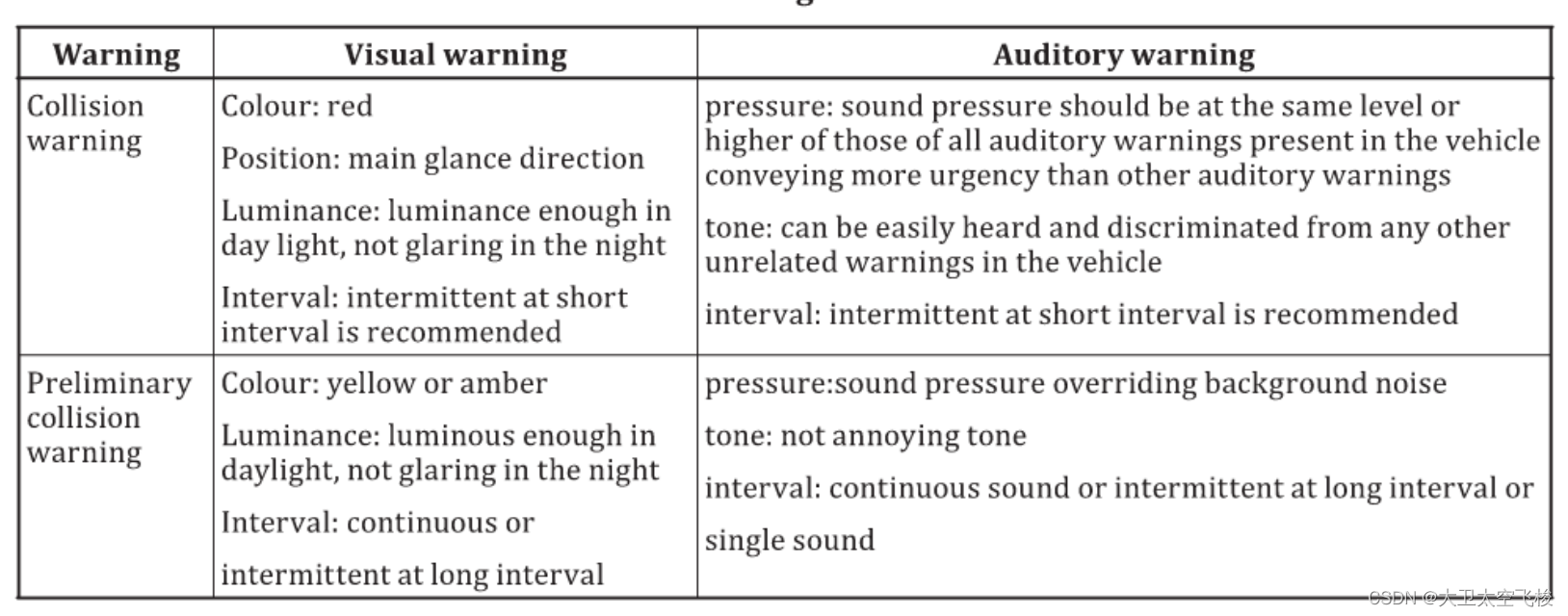
2.10.2 FVCWS 在曲线上的性能
即使在车辆配备有前方车辆碰撞预警系统以及诸如后方或侧方障碍物的其他预警系统的情况下,应该清楚地区分相对于其他不相关的警告驾驶员。
2.10.3 操作状态显示
应提供明确标识系统运行状态的以下指示。
系统运行指示
可以提供通知驾驶员系统运行的指示(例如,照亮的电源开关)。
错误指示
应提供通知驾驶员系统故障的指示(例如显示面板上的故障指示)。
2.11 系统限制知道
应该使用适当的方法让系统用户了解系统的限制,如使用手册和/或警告标签。
例如对于正面碰撞,交叉路径碰撞,超出传感器极限的操作(包括短半径曲线等)以及达到最大速度𝑊m𝑎𝑥 的警告,不适用于此系统。
3. ISO 15623 测试检测性能的评估测试方法
3.1 测试目标规范
3.1.1 光学雷达
测试目标被定义为具有代表摩托车的物理尺寸和表面轮廓,并具有代表摩托车反射率的用于测试目标的反射系数(RCTT)。
3.1.2 无线电波雷达
测试目标由代表摩托车的横截面(RCS)定义。
注意 在实际使用中,汽车障碍物检测传感器的测量范围比较短,在散射上难以实现平面波。因此,为方便起见,汽车使用的 RCS 值由实际使用范围内的测量值定义。
附录 D 中讨论了可能的测试目标几何形状的例子。
3.1.3 被动光学传感器
测试目标被定义为具有代表性的摩托车或乘用车的物理尺寸,形状和表面轮廓。
3.2 环境条件
a) 试验地点应在平整,干燥的沥青或混凝土表面.
b) 温度范围应在 -20℃ 到 + 40℃ 之间.
c) 水平能见度范围应大于 1km.
d) 在日光条件下可能会发生测试.
3.3 检测区域的测试方法
检测区域最真实的测试是动态测试,但是静态测试也是一个选项。测试应按如下进行。如图4所示,系统将检测位于𝑑0 和 𝑑1 之间任意距离的测试目标。
系统应检测位于 𝑑1 和 𝑑2 之间任意距离的测试目标,如图4所示。系统将在距离 𝑑2 和 𝑑 m𝑎𝑥 处依次检测测试目标,如下图所示。如果没有专门的测量设备(如传感器和 ECU 紧密集成在一起)检测不能被验证,制造商可以使用特殊的测量设备进行测试,并提供测试结果以供检查。此外,由于该测试允许进行动态测试,因此可以与第 6 章中的另一测试同时进行,以便在执行另一测试时满足该测试方法的意图。例如,可以使用满足先前定义的测试目标规格的测试车辆作为测试目标。在本测试中定义的不同距离处成功启动碰撞警告可被视为成功检测。
3.4 警告距离范围和准确度的测试方法
3.4.1 警告距离范围测试
目标和主体车辆在直路上在同一车道上行驶。目标车辆正在以 8 ± 1m/s 的速度移动。目标车辆以 20 ± 2m/s 的速度移动。测量的警告距离应大于或等于5.5.6中计算的距离。
3.4.2 警告距离精度测试
这个测试应在车辆运动中完成。
标准目标应在检测区域内。当主体车辆以 V = 20m/s 的速度向标准目标靠近行驶时,应按照以下步骤测量警告距离。应该测量两个时间。第一个时间点 t0 是主体车辆到标准目标的等于 d 的点。第二个时间点 t1 是发出警告的时间点。从标准目标的警告距离计算为 D = 𝑑 − 𝑊 × t1 − t0 。D 与制造商指定的警告距离进行比较。在 70% 的重复试验中,报警距离精度应达到5.7.2。重复测试次数应大于或等于7 次测试。
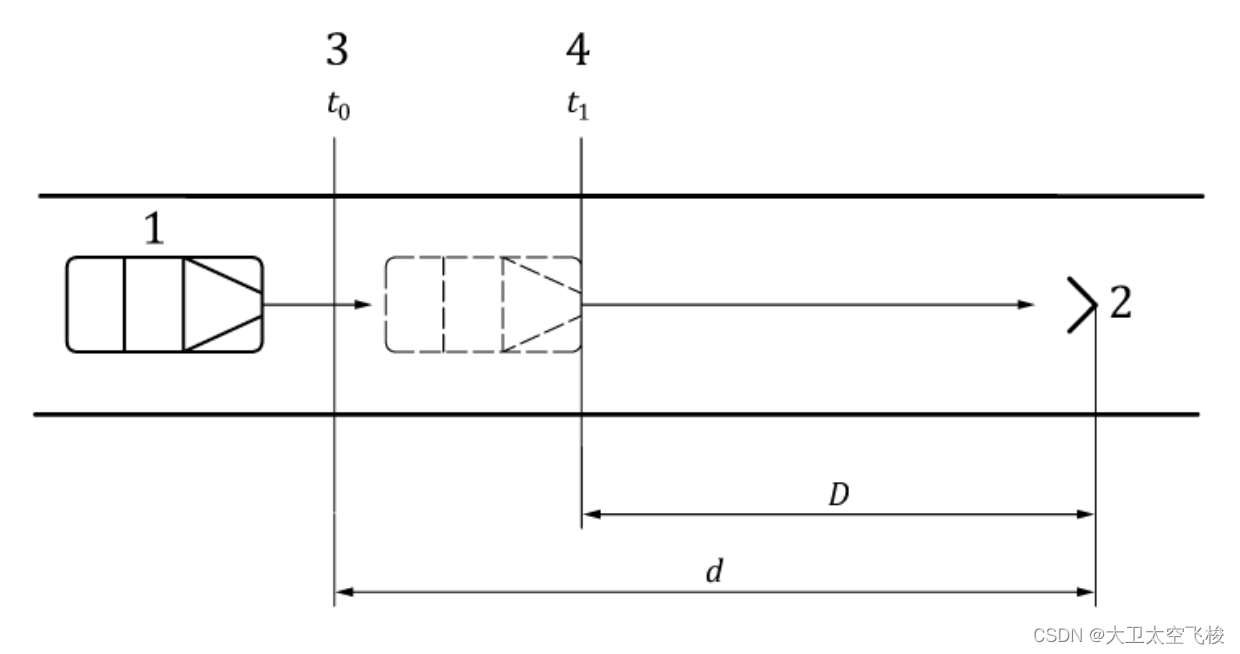
1 Subject vehicle
2 Standard target
3 Standard timing
4 Warning timing
3.5 目标分辨力测试方法
这个测试应在车辆运动中完成。本条款的测试在车辆“发出警告”时完成。测试也应该显示避免滋扰警告的能力。例如,当操作完成且没有警告产生时的测试条件。
3.5.1 纵向歧视
检测区域内的两台目标车辆以 20m/s 的相同速度行驶。主体车辆以速度= 20m/s 跟随两辆目标车辆。两台目标车辆之间的时间差应为 𝑇 min (= 0.6s ± 0.1s),并且两台目标车辆沿着一条直线定位,使得近目标车辆不掩盖远方目标车辆。主体车辆与近目标车辆之间的时间差可能超过 𝑇 max (= 1.5s) 。主体车辆加速,直到系统产生碰撞警。
3.5.2 侧向歧视
直道横向歧视测试
测试应该动态执行。目标车辆和目标车辆以相同的速度( 20m/s)行驶,时间间隔应为 𝑇 max(= 1.5s) 。驾驶前方车辆以相同速度 20m/s 主体车辆前面。前车的纵向中心线间距为 3.5m ± 0.1m 。前车的宽度应在 1.4 米至 2.0 米之间。主体车辆的纵向中心线相对于目标车辆的纵向中心线的横向位移应小于 0.5m。几秒钟后,前方车辆减速到显着低于主体和目标车辆速度的速度。在前方车辆通行期间,主体车辆不得发出警告。接下来,几秒钟之后,只有近目标车辆减速到足够低以使主体车辆产生碰撞警告。当目标车辆发出警告时,测试结束。
弯道横向歧视测试
除直路试验外,下面的测试应该在一个圆圈或一个圆圈的足够部分进行:在半径为 500 米或 Ⅰ 类的情况下;半径为 250 米或 Ⅱ 类的情况下;半径在 125 米或 Ⅲ 类的情况下。主体车辆和目标车辆以相同的速度在车道内行驶,并且不会引起警告。前方车辆在外侧车道的目标车辆旁边驾驶。几秒钟后,前方车辆减速到显着低于主体和目标车辆速度的速度。在前方车辆通行期间,主体车辆不得发出警告。接下来,几秒钟之后,只有近目标车辆减速到足够低以使主体车辆产生初步碰撞警告。当目标车辆发出警告时,测试结束。
3.5.3 高架歧视
测试应该动态执行。安装可能导致错误警告的测试目标。 试验目标应为混凝土桥梁或架空交通标志结构的代表。 目标车辆接近测试目标,并在其下面通过。 当目标车辆没有发出警告时,测试结束。 目标的高度是 4.5 米。
以上 ISO15623 - 2013 (英文版)摘自:www.doc88.com-道客巴巴

有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐

 2
2 0
0- 0



 已为社区贡献3条内容
已为社区贡献3条内容

所有评论(0)